麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划
2024-07-03张志文刘伯威张继园唐杰张天赐
张志文 刘伯威 张继园 唐杰 张天赐

摘要:
针对智能汽车在面对多样化工作场景时其路径规划算法存在响应时间长、规划效率低的问题,提出了多元协同优化策略。首先,融合麻雀搜索算法(SSA)的警惕机制与粒子群算法(PSO)的种群寻优特性,对PSO算法中的惯性权重因子和学习因子进行优化;其次,提出“三角布线”搜索规则,对快速扩展随机树算法(RRT)进行双向优化(RRT-Connect);然后,基于MATLAB软件建立了复杂环境道路仿真模型,对上述优化方案进行了仿真验证。结果表明,相较于单一的优化方案,协同优化算法在路径长度与规划时间上均具有显著的优势。对两种协同优化方案的应用场景进行了实车试验,结果显示:在局部路径规划中,SSA-PSO算法响应时间更短,规划效率更高,而在全局路径规划中,“三角布线”RRT-Connect算法更具优势。
关键词:路径规划;麻雀搜索算法;粒子群算法;三角布线;快速扩展随机树算法
中图分类号:U461
DOI:10.3969/j.issn.1004132X.2024.06.005
开放科学(资源服务)标识码(OSID):
Cooperative Optimization of Intelligent Vehicle Path Planning Based on
PSO-SSA and RRT
ZHANG Zhiwen1,2 LIU Bowei3 ZHANG Jiyuan1 TANG Jie1 ZHANG Tianci1,2
1.School of Vehicle and Energy,Yanshan University,Qinhuangdao,Hebei,066004
2.Hebei Key Laboratory of Special Carrier Equipment,Yanshan University,Qinhuangdao,Hebei,066004
3.North Automatic Control Technology Institute,Taiyuan,030006
Abstract: Regarding the issues of long response time and low planning efficiency in the path planning algorithms for smart vehicles facing diverse working scenarios, a multi-element collaborative optimization strategy was proposed. Firstly, the vigilance mechanism of SSA was integrated with the population optimization characteristics of PSO, optimizing the inertia weight factor and learning factor in the PSO algorithm. Secondly, a “triangular wiring” search rule was introduced to perform bidirectional optimization(RRT-Connect) on the RRT algorithm. Subsequently, a complex environmental road simulation model was established using MATLAB software, and simulation tests were conducted on the proposed optimization solutions. The results demonstrate that, compared to single optimization approaches, the collaborative optimization algorithm exhibits significant advantages in terms of path length and planning time. Finally, real-vehicle tests are conducted on the application scenarios of the two collaborative optimization solutions, showing that in local path planning, the SSA-PSO algorithm has a shorter response time and higher planning efficiency, while in global path planning, the “triangular wiring” RRT-Connect algorithm exhibits greater advantages.
Key words: path planning;sparrow search algorithm(SSA); particle swarm optimization(PSO) algorithm; triangular wiring; rapidly-exploring random tree(RRT) algorithm
收稿日期:20231013
基金项目:国家自然科学基金区域创新发展联合基金(U20A20332);国家自然科学基金(52175063)
0 引言
工业4.0推动了机器人、智能产品、自动驾驶等领域的研究热度[1]。自动驾驶技术标志着一个国家汽车工业发展水平,而我国已然成为智能车辆技术先进的国家。在智能汽车工作过程中,控制系统通过众多传感器采集到路况信息后,快速实时地规划行驶路径是自动驾驶关键技术之一,因此,路径规划算法的准确度和效率在一定程度上决定了智能车辆工作效率和工作质量。
对路径规划算法的研究有很多,常见的有A*算法[2]、遗传算法[3]、神经网络算法[4]、人工势场法[5]、模拟退火算法[6]、蚁群算法[7]、RRT*算法[8]等。各种算法在不同领域中都有广泛的应用,其优缺点也各不相同。CHENG等[9]提出多自适应度目标函数对路径规划结果进行评价,将最优路径求解问题转化为多目标优化问题。HAO等[10]将随机种群分解为多个小型种群,种群之间的筛选机制由选择算子更改为迁移机制,以适应多变的地图环境。LAMINI等[11]提出了考虑距离和安全性能的交叉算子路径规划方法,给出了新的适应度函数,有效解决了早熟收敛的问题,达到了寻找最优路径的目的。吕刚等[12]提出了一种结合A*算法和强化学习中近端策略优化算法的动态路径规划算法,通过缩短训练周期避免算法过早陷入局部最优。彭晓燕等[13]提出离散优化的局部路径规划算法,引入代价函数评估候选路径的安全性、平滑性,以获得局部最佳路径。徐钊等[14]通过分析人工势场法、模糊逻辑算法和蚁群算法,提出一种增加垂直引导斥力来解决陷入局部最小值问题的方法。
麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划——张志文 刘伯威 张继园等
中国机械工程 第35卷 第6期 2024年6月
本文基于麻雀搜索算法(sparrow search algorithm ,SSA)和粒子群优化(particle swarm optimization ,PSO)算法探索智能车辆避障与优化。 将麻雀搜索算法的学习因子和惯性权重因子引入到粒子群算法中进行优化,实现智能汽车局部路径规划。基于三角不等式函数改进快速搜索随机树(rapidly-exploring random tree ,RRT)算法,利用三角不等式原理,从函数角度解决最优性的局限问题,从而探索全局路径规划。
1 路径规划
路径规划是智能汽车的关键技术,因此需要优异的算法以实现智能汽车更安全、更精准、更平滑地抵达目的地[15]。具体的路径规划研究要实现以下目标:安全到达目的地;计算时间短;路径平滑且距离短;不能穿过障碍物或与障碍物发生碰撞。
本文提出的SSA-PSO算法将麻雀搜索算法和粒子群优化算法融合,选取各自的优点,使得智能汽车能够胜任更多复杂场景的任务。同时受到三角不等式函数的启发,采用基于“三角布线”的RRT-Connect算法以更好地适应不同的任务环境。搭建的智能汽车平台在校园道路进行试验,路况相对简单,障碍物分布相对固定,突发情况较少,如图1所示。
2 融合麻雀搜索策略的粒子群优化算法
将麻雀搜索算法的速度更新方式和权重因子引入到粒子群算法中,通过调整参数提高SSA-PSO算法的收敛速度和搜索精度[16]。智能汽车采用PSO算法进行路径规划时,将每个粒子个体看作单独的规划路径,若粒子群有n个粒子,则有n条路径,将单个粒子中染色体个数m定义为中间过渡点数,而每个点又包含两个维度(x,y)[17],对粒子群进行迭代以选择出合适个体,即最优路径。
2.1 算法模型建立
SSA-PSO算法在PSO基础上进行SSA算法中速度的更新和位置的更新。为了在复杂函数寻优过程中避免迭代过程中漏掉实际最优,同时避免在更新位置后陷入局部最优,权重因子采用正弦变化,改进后的SSA-PSO算法权重因子为
ω(k)=ωmax-ωminksin(πkkmax)+ωmax+ωmink(1)
式中,ω(k)为第k次迭代的惯性权重因子,ωmax=1,ωmin=0.5;k为当前算法的迭代次数;kmax为最大迭代次数。
2.1.1 位置更新原则
传统粒子群优化算法经过麻雀搜索算法优化后,对其位置进行更新,公式如下:
Xid=Xid0+X(t+1)i,j(2)
式中,Xid为个体发生变化后的位置;Xid0为个体原始位置;X(t+1)i,j为第t+1代时麻雀的坐标信息。
每代位置更新公式定义如下:
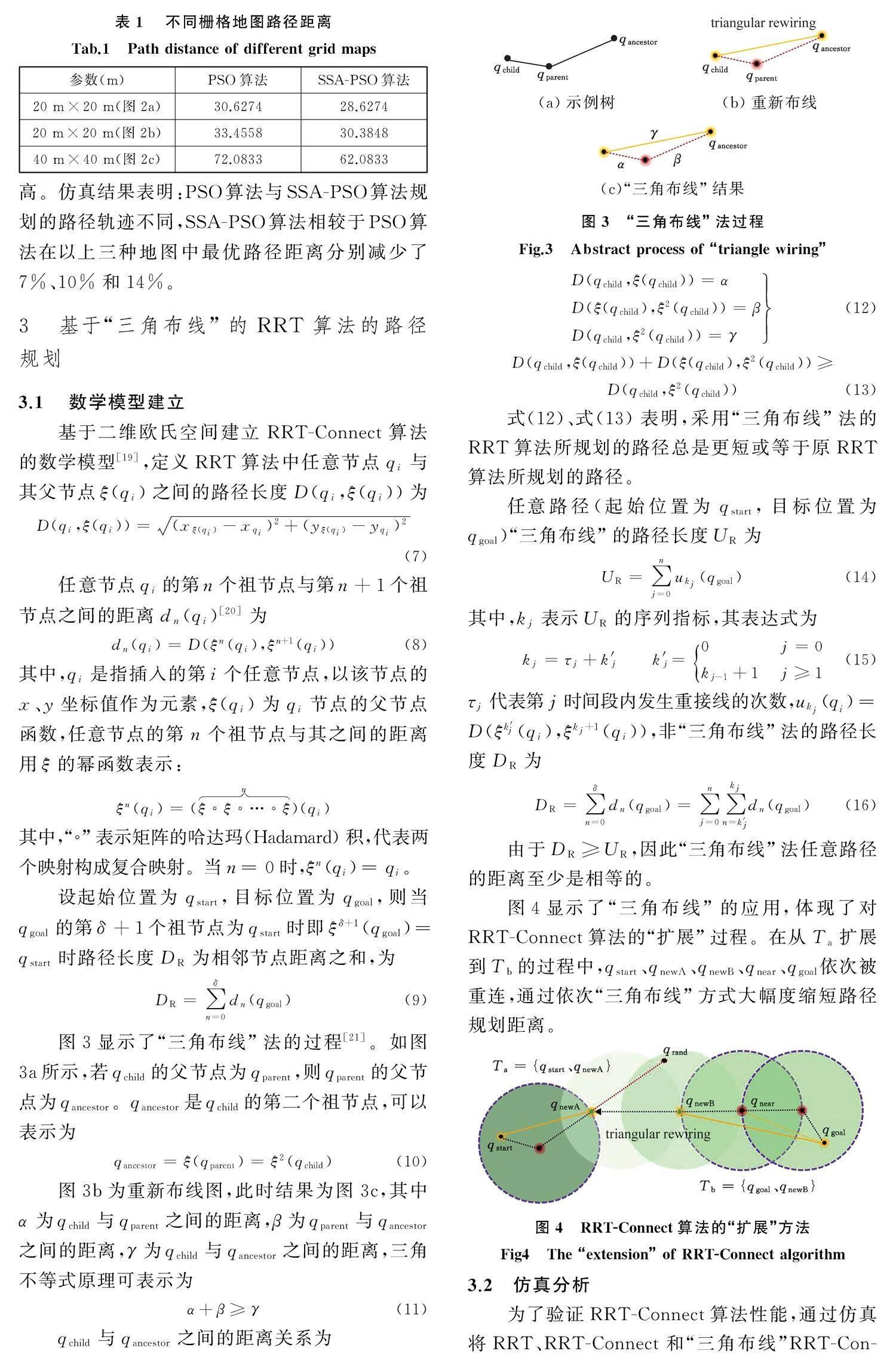
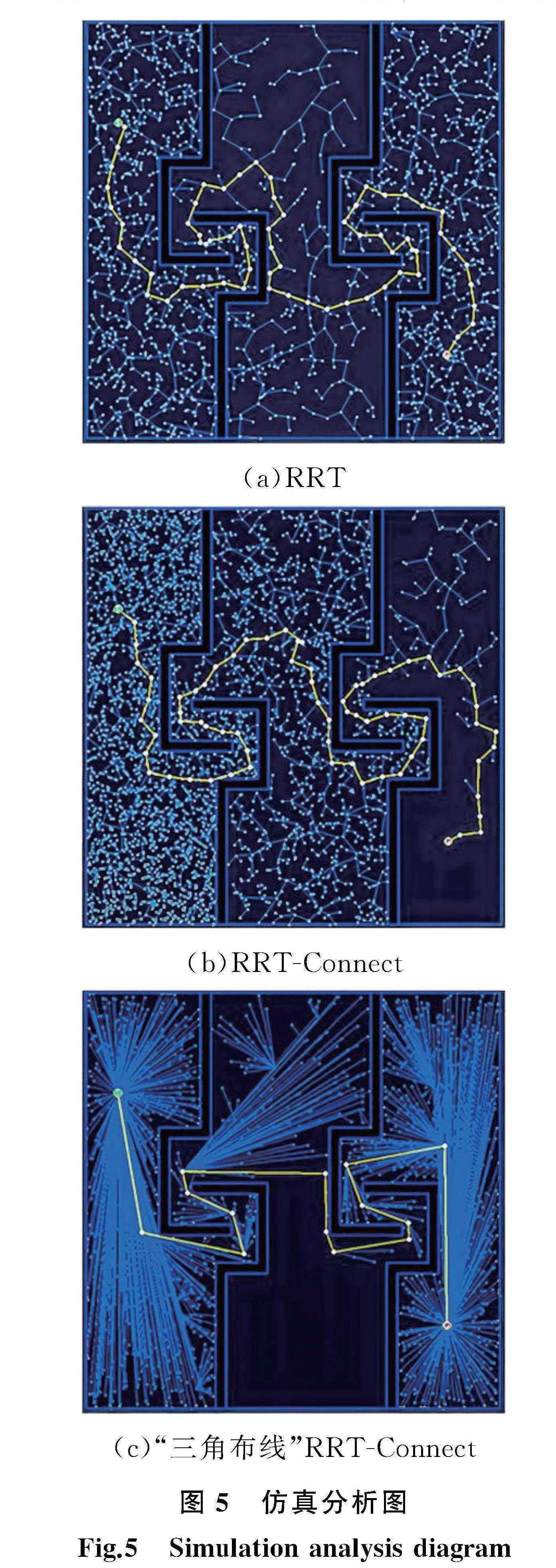
X(t+1)i,j=X(t)i,jexp(-iaTmax) A X(t)i,j+QLA≥S(3) 式中,Tmax为最大迭代次数;X(t)i,j为第t代第i个麻雀在第j维中的位置信息;a为(0,1]的随机数;A为警惕值,A∈[0,1];S为安全阈值,S∈[0.5,0.7];Q为服从正态分布的一个随机数;L为一个1×d的矩阵,且元素均为1。 当A<S时,表示附近无危险,麻雀可以在该空间范围内随意搜索食物;当A≥S时,表明发现者感知到危险,此时部分麻雀会以跟随者的身份跟随发现者一起行动,一旦发现者找到食物就会靠近与其争夺食物,其中跟随者中的一小部分因为食物太少就会飞到其他区域寻找食物。即跟随过程中位置更新公式为 X(t+1)i,j=Qexp(X(t)w-X(t)i,ji2) i>N/2 X(t+1)P+|X(t)i,j-X(t+1)P|A+Li≤N/2(4) 式中,XP为目前发现者所占据的最优位置;Xw为当前全局最差的位置;N为种群数;A为一个1×d的矩阵,A+=AT(AAT)-1。 当i >N/2时,表明适应度值较低的第i个跟踪者没有得到食物,更换位置以获取食物。当感知到危险时,麻雀种群会做出反捕食行为。即感知危险后位置要更新,其数学表达式如下: X(t+1)i,j=X(t)B+b(X(t)i,j-X(t)B) fi≠fg X(t)i,j+K(X(t)i,j-X(t)w|fi-fw|+ε)fi=fg(5) 式中,XB为当前的全局最优位置;b为步长调节因子;K为分布在[-1,1]的随机数;fi为当前个体的适应度值;fg、fw分别为全局最佳和最差适应度值;ε为一个极小常数。 2.1.2 速度更新原则 为了减少粒子群中粒子的随机性,提高粒子运动的可控性,在位置更新过程中,粒子群算法优化过程中速度更新公式如下: vid=ω(k)vid+c1r1(pid-xid)+c2r2(pgd-xid)(6) 式中,ω(k)为更新算法的惯性权重因子,根据工况确定ω的大小以平衡算法收敛性与全局搜索能力;r1、r2均为随机值;vid为优化过后的SSA-PSO个体速度;pid为当前个体的最优位置;pgd为当前个体的全局最优位置;c1、c2为新的学习因子。 2.1.3 碰撞检查 路径规划后,用iscoll(·)函数检查每段路径是否和障碍物相交。原理如下:将障碍物轮廓投影到规划路径曲线上,将曲线段横坐标n等分后取点,n的大小由障碍物轮廓大小及规划路径曲线的曲率确定,将每个点的坐标输入到障碍物的边界匿名函数中,以判断该点是否落在障碍物中。若至少有一点落在障碍物上,说明路径与障碍物发生了碰撞,则该路径方案被否定。 2.2 仿真实现及分析 基于MATLAB 平台建立3种不同规格的栅格地图,对传统PSO和SSA-PSO算法进行仿真对比研究。以室内障碍物和常见的城市道路环境为基础建立栅格环境[18],为了验证在任一随机环境中具有普适性,在20 m×20 m的栅格地图上路径仿真结果对比见图2a、图2b,在40 m×40 m的栅格地图上的结果对比见图2c。表1为仿真图路径对比数据。由图2可以看到,无论是小地图(20 m×20 m)还是大地图(40 m×40 m),SSA-PSO算法相比于PSO算法路径规划距离更短,效率更高。仿真结果表明:PSO算法与SSA-PSO算法规划的路径轨迹不同,SSA-PSO算法相较于PSO算法在以上三种地图中最优路径距离分别减少了7%、10%和14%。 3 基于“三角布线”的RRT算法的路径规划 3.1 数学模型建立 基于二维欧氏空间建立RRT-Connect算法的数学模型[19],定义RRT算法中任意节点qi与其父节点ξ(qi)之间的路径长度D(qi,ξ(qi))为 D(qi,ξ(qi))=(xξ(qi)-xqi)2+(yξ(qi)-yqi)2(7) 任意节点qi的第n个祖节点与第n + 1个祖节点之间的距离dn(qi)[20]为 dn(qi)=D(ξn(qi),ξn+1(qi))(8) 其中,qi是指插入的第i个任意节点,以该节点的x、y坐标值作为元素,ξ(qi)为qi节点的父节点函数,任意节点的第n个祖节点与其之间的距离用ξ的幂函数表示: ξn(qi)=(ξξ…ξn)(qi) 其中,“”表示矩阵的哈达玛(Hadamard)积,代表两个映射构成复合映射。当n=0时,ξn(qi)=qi。 设起始位置为qstart,目标位置为qgoal,则当qgoal的第δ + 1个祖节点为qstart时即ξδ+1(qgoal)=qstart时路径长度DR为相邻节点距离之和,为 DR=∑δn=0dn(qgoal)(9) 图3显示了“三角布线”法的过程[21]。如图3a所示,若qchild的父节点为qparent,则qparent的父节点为qancestor。qancestor是qchild的第二个祖节点,可以表示为 qancestor=ξ(qparent)=ξ2(qchild)(10) 图3b为重新布线图,此时结果为图3c,其中α为qchild与qparent之间的距离, β为qparent与qancestor之间的距离,γ为qchild与qancestor之间的距离,三角不等式原理可表示为 α+β≥γ(11) qchild与qancestor之间的距离关系为 D(qchild,ξ(qchild))=α D(ξ(qchild),ξ2(qchild))=β D(qchild,ξ2(qchild))=γ(12) D(qchild,ξ(qchild))+D(ξ(qchild),ξ2(qchild))≥ D(qchild,ξ2(qchild))(13) 式(12)、式(13)表明,采用“三角布线”法的RRT算法所规划的路径总是更短或等于原RRT算法所规划的路径。 任意路径(起始位置为qstart,目标位置为qgoal)“三角布线”的路径长度UR为 UR=∑nj=0ukj(qgoal)(14) 其中,kj表示UR的序列指标,其表达式为 kj=τj+k′j k′j=0 j=0 kj-1+1j≥1(15) τj代表第j时间段内发生重接线的次数,ukj(qi)=D(ξk′j(qi),ξkj+1(qi)),非“三角布线”法的路径长度DR为 DR=∑δn=0dn(qgoal)=∑nj=0∑kjn=k′jdn(qgoal)(16) 由于DR≥UR,因此“三角布线”法任意路径的距离至少是相等的。 图4显示了“三角布线”的应用,体现了对RRT-Connect算法的“扩展”过程。在从Ta扩展到Tb的过程中,qstart 、qnewA、qnewB、qnear、qgoal 依次被重连,通过依次“三角布线”方式大幅度缩短路径规划距离。 3.2 仿真分析 为了验证RRT-Connect算法性能,通过仿真将RRT、RRT-Connect和“三角布线”RRT-Connect三种算法在试验环境中进行对比研究。构建图5所示的复杂环境地图并仿真每个算法在地图中的路径规划结果。仿真结果显示,图 5a的样本数量最多,图5b与图5c算法的样本数量相似,“三角布线”RRT-Connect算法路径长度最短。 表2所示为每种算法的路径规划结果(重复试验50次后)。RRT-Connect算法的平均样本数量相对比率(基于RRT算法)最小,为72%;“三角布线”RRT-Connect算法的平均样本数量相对比率(基于RRT算法)为73%,比RRT-Connect算法的效率低1%;“三角布线”RRT-Connect算法的平均路径长度最短,为RRT算法的77%,RRT-Connect算法的平均路径长度相对比率(基于RRT算法)为97%;RRT-Connect算法的平均规划时间最短,为RRT算法的35%,“三角布线”RRT-Connect算法的规划时间最短,比RRT算法的效率低1%。 4 智能车辆路径规划平台试验 4.1 试验平台硬件配置 为了保证智能车辆的路径规划研究具有实际可行性,选用基于激光雷达和毫米波雷达传感器为主的纯电动智能车辆试验平台开展试验研究。在实车验证时,局部路径规划采用SSA-PSO算法,全局路径规划采用基于“三角布线”的RRT-Connect算法。纯电动无人驾驶智能车辆如图6所示。 4.2 路径规划验证结果分析 基于纯电动无人驾驶智能车辆平台进行路径规划算法测试。图7为试验车系统结构图,主要包括环境感知系统、规划决策系统及底层控制系统。图8所示为道路图像采集过程,激光雷达采集点云信号,探测近距离复杂路况信息,毫米波雷达采集远距离障碍物信息,ZED双目相机采集路况的图像信息。图9为点云数据信号图,高精度试验过程中图像识别系统通过各传感器采集路况信息,图像处理系统将图像信息与点云信号进行信息融合。路径规划系统根据图像处理后的数据建立包括障碍物信息的试验路况。 测试过程中,首先将生成轨迹路径与期望路径数据进行对比分析;然后,测试车速变化情况,对比分析通过软件仿真的预描车速、采用路径规划的速度及车辆行驶的实际数据;最后分析车辆遇到障碍物时偏离期望路径的误差。 选择图8路况进行测试,测试速度范围为0~15 km/h,测试结果如图10所示。其中图10a用来对比路径情况,结果显示,在行驶的300 s内智能小车在0~15 km/h之间不断加减速运行,实际行驶路径和算法规划路径十分接近,即两种优化算法规划的路径与实际路径完全一致,表明算法规划路径准确性较高。图10b用来对比车速变化情况,结果显示,在16 s之前智能小车未遇到新的障碍物,处于不断加速状态,在16 s后障碍物出现,智能小车进行实时减速避障,采用SSA-PSO算法进行了局部路径规划,算法规划的速度优于实际速度,证明提出的算法在应对该工况时规划效率较高。图10c用来作横向误差对比,结果显示,提出的算法在该路况下,行驶时发生的横向误差基本在-0.1~0.1 m之间,证明算法在遇到障碍物时偏离期望路径的误差较小,算法精度较高。 表3所示为工况试验结果数据,智能车辆在局部规划时,SSA-PSO算法需要62 ms,而基于“三角布线”的RRT-Connect算法需要69 ms,SSA-PSO算法相较于基于“三角布线”的RRT-Connect算法规划时间要少7 ms,表明了在试验工况中智能车辆局部路径规划时SSA-PSO算法表现更好,效率更高,性能更优。然而,在智能车辆全局规划时,SSA-PSO算法需要141 ms,基于“三角布线”的RRT-Connect算法仅需要122 ms,基于“三角布线”的RRT-Connect算法相较于SSA-PSO算法规划时间要少19 ms,表明在试验工况中智能车辆全局路径规划时基于“三角布线”RRT-Connect算法表现更好,效率更高,性能更优。 5 结论 (1)对智能车辆路径规划的算法进行了优化,通过将麻雀搜索算法(SSA)的警惕机制与粒子群优化(PSO)算法的种群寻优特性相结合,并对PSO算法中的惯性权重因子、学习因子进行优化,可在加强算法局部搜索能力的同时,保持种群的多样性,防止算法在快速收敛的同时出现早熟。 (2)基于三角不等式原理融合随机树算法探索全局路径规划,利用三角不等式原理解决最优性的局限问题,基于“三角布线”法优化RRT-Connect算法提高全局路径优化精度与效率。 (3)基于纯电动无人驾驶智能车辆试验平台对提出的算法进行了试验验证,结果表明两种优化算法均具有高效性与精确性。 参考文献: [1] SCHWAB K. The Fourth Industrial Revolution[M]. New York:Crown Business, 2017. [2] 张鹏. 基于改进A*算法的全局动态路径规划研究[D].太原:中北大学,2021. ZHANG Peng. Research on Global Dynamic Path Planning Based on Improved A* Algorithm[D]. Taiyuan:North University of China, 2021. [3] GILBERT E G, JOHNSON D W. Distance Functions and Their Application to Robot Path Planning in the Presence of Obstacles[J]. IEEE Journal on Robotics and Automation ,1985, 1(1):21-30. [4] MADANI T, DAACHI B, BENALLEGUE A. Adaptive Variable Structure Controller of Redundant Robots with Mobile/Fixed Obstacles Avoidance[J]. Robotics and Autonomous Systems, 2013,61(6):555-564. [5] LI G, TONG S, CONG F, et al. Improved Artificial Potential Field-based Simultaneous Forward Search Method for Robot Path Planning in Complex Environment[C]∥2015 IEEE/SICE International Symposium on System Integration. Nagoya :IEEE,2015:760-765. [6] 夏军勇, 刘科进, 钟飞, 等. 运用改进的教学模拟退火算法辨识关节臂式三坐标测量机的结构参数[J]. 中国机械工程, 2023, 34(3):314-323. XIA Junyong, LIU Kejin, ZHONG Fei,et al. Structural Parameter Identification for Articulated Arm Coordinate Measuring Machines Using Modified Teaching-learning-based Optimization Optimized by Simulated Annealing Algorithm[J]. China Mechanical Engineering, 2023, 34(3):314-323. [7] 刘加奇,王泰华,董征. 基于改进蚁群算法的移动机器人路径规划[J].传感器与微系统,2022,41(5):140-143. LIU Jiaqi, WANG Taihua, DONG Zheng. Path Planning of Mobile Robot Based on Improved Ant Colony Algorithm[J]. Sensors and Microsystems,2022,41(5) :140-143. [8] 师颖慧,张冰,赵强. 改进型RRT*算法的水下机器人三维全局路径规划[J].软件导刊, 2022,21(2):48-52. SHI Yinghui,ZHANG Bing, ZHAO Qiang. 3D Global Path Planning of Underwater Vehicle Based on Improved RRT* Algorithm[J]. Journal of Software Guide, 202,21(2):48-52. [9] CHENG K P, RAJESH E M, NGUYEN H K N,et al. Multi-objective Genetic Algorithm Based Autonomous Path Planning for Hinged Tetro Reconfigurable Tiling Robot[J]. IEEE Access,2020,8:121267-121284. [10] HAO K, ZHAO J L, YU K C, et al. Path Planning of Mobile Robots Based on a Multi-population Migration Genetic Algorithm[J]. Sensors, 2020,20(20):5873-5873. [11] LAMINI C, BENHLIMA S, ELBEKRI A. Genetic Algorithm Based Approach for Autonomous Mobile Robot Path Planning[J]. Procedia Computer Science,2018,127:180-189. [12] 吕刚,吕金壮,邓军,等. 部分环境信息未知下的机器人动态路径规划算法[J].自动化与仪器仪表, 2022(3):186-190. LYU Gang, LYU Jinzhuang, DENG Jun, et al. Robot Dynamic Path Planning Algorithm with Unknown Environmental Information[J]. Automation & Instrumentation, 2022(3):186-190. [13] 彭晓燕,谢浩,黄晶. 无人驾驶汽车局部路径规划算法研究[J].汽车工程, 2020,42(1):1-10. PENG Xiaoyan, XIE Hao, HUANG Jing. Research on Local Path Planning Algorithm for Driverless Vehicles[J]. Automotive Engineering, 2019,42(1):1-10. [14] 徐钊,胡劲文,马云红,等. 无人机碰撞规避路径规划算法研究[J].西北工业大学学报, 2019,37(1):100-106. XU Zhao, HU Jinwen, MA Yunhong, et al. Research on Collision Avoidance Path Planning Algorithm for UAV[J]. Journal of Northwestern Polytechnical University, 2019,37(1):100-106. [15] AGARWAL D, BHARTI P S. Implementing Modified Swarm Intelligence Algorithm Based on Slime Moulds for Path Planning and Obstacle Avoidance Problem in Mobile Robots[J]. Applied Soft Computing Journal, 2021,107:233613844. [16] ZAFAR M N, MOHANTA J C. Methodology for Path Planning and Optimization of Mobile Robots:a Review[J]. Procedia Computer Science,2018,133:141-152. [17] 刘伯威. 基于改进PSO与RRT的智能车辆路径规划研究[D].太原:中北大学,2023. LIU Bowei. Research on Intelligent Vehicle Path Planning Based on Improved PSO and RRT[D]. Taiyuan:North University of China,2023. [18] 杜婉茹,王潇茵,田涛,等. 面向未知环境及动态障碍的人工势场路径规划算法[J].计算机科学, 2021,48(2):250-256. DU Wanru, WANG Xiaoyin, TIAN Tao, et al. Artificial Potential Field Path Planning Algorithm for Unknown Environment and Dynamic Obstacles[J]. Computer Science, 2021,48(2):250-256. [19] 李兆强,张时雨. 基于快速RRT算法的三维路径规划算法研究[J].系统仿真学报, 2022,34(3):503-511. LI Zhaoqiang, ZHANG Shiyu. Research on 3D Path Planning Algorithm Based on Fast RRT Algorithm[J]. Journal of System Simulation, 2022,34(3):503-511. [20] WANG Z F, WANG Q, BILL M, et al. Optimal Submarine Cable Path Planning and Trunk-and-Branch Tree Network Topology Design[J]. IEEE/ACM Transactions on Networking, 2020,28(4):1562-1572. [21] JEONG I B, LEES J, KIM J H. Quick-RRT*:Triangular Inequality Based Implementation of RRT* with Improved Initial Solution and Convergence Rate[J]. Expert Systems with Applications, 2019,123(1):82-90. (编辑 王艳丽) 作者简介: 张志文,男,1984 年生,副教授。研究方向为新能源车辆能量管理、智能汽车路径规划。E-mail:zhzhw@ysu.edu.cn。 张天赐(通信作者),男, 1993年生,讲师、博士研究生。研究方向为无人化工程车辆运动规划、智能系统开发。E-mail:ztc@ysu.edu.cn。
