复合型径向机构在地铁车辆上的适用性研究
2024-07-03郑阳代亮成池茂儒郭兆团曾鹏程
郑阳 代亮成 池茂儒 郭兆团 曾鹏程

摘要:
设置径向机构是解决铁道车辆蛇行稳定性与曲线通过性能之间矛盾的主要措施,然而,传统的杠杆式迫导向转向架在低等效锥度状态下运行时,由于连杆的存在加剧了车辆的一次蛇行,进而导致车辆的稳定性下降。针对传统杠杆式迫导向转向架存在的上述缺陷,提出了一种复合型径向机构,该径向机构使车辆在小半径曲线运行时具有迫导向的功能,车辆在大半径曲线或直线上运行时迫导向功能失效,从而克服了传统杠杆式迫导向转向架存在的不足。基于复合型径向机构的工作原理,建立了该机构的数值仿真模型和控制模块,然后采用MATLAB/Simulink对复合型径向机构数学模型和地铁车辆动力学模型进行联合仿真,研究它对车辆系统动力学性能的影响,并进行了台架试验验证。结果表明,复合型液控径向机构不但可以保证车辆具有良好的曲线通过性能,而且可大幅度提高车辆的稳定性。
关键词:地铁车辆;径向转向架;曲线通过性能;复合型径向机构;蛇行运动稳定性
中图分类号:U270
DOI:10.3969/j.issn.1004132X.2024.06.018
开放科学(资源服务)标识码(OSID):
Adaptability Analysis of Composite Radial Mechanisms in Metro Vehicles
ZHENG Yang DAI Liangcheng CHI Maoru GUO Zhaotuan ZENG Pengcheng
State Key Laboratory of Rail Transit Vehicle System,Southwest Jiaotong University,
Chengdu,610036
Abstract: Setting up radial mechanisms was the main measure to solve the contradiction between serpentine stability and curve passing performance of railway vehicles. However, the conventional lever-type forced-guided steering rack operated in a low-equivalent taper state, where the presence of the linkage exacerbated the vehicles primary-hunting, which in turn led to a decrease in vehicle stability. Aiming at the above-mentioned defects of the traditional lever-type forced-guided bogie, a composite radial mechanism was proposed. This radial mechanism enabled the vehicle to operate in small radius curves with the function of forced guidance, and the vehicle operated in large radius curves or straight lines so that the function of forced guidance was invalidated, thus the shortcomings of the traditional forced-guided bogies were overcome. Based on the working principle of the composite radial mechanisms, the numerical simulation model and control module of the mechanisms were established. Then MATLAB/Simulink was used to jointly simulate the numerical models of the composite radial mechanisms and the dynamics models of the subway vehicles to study the effects on the dynamics performance of the vehicle systems. Then the results were verified by bench testing. The results show that the composite hydraulic radial mechanisms ensure the vehicle has good curve passing performance, and greatly improves the stability of the vehicles.
Key words: metro vehicle; radial bogie; curve passing performance; composite radial mechanism; serpentine smoothness
收稿日期:20230919
基金项目:国家重点研发计划(2022YFB4301202)
0 引言
近年来,随着城市轨道交通的大力发展,我国开通运营城市轨道交通的城市已经达到了51座,运营里程也达到了九千多公里[1],已然成为世界城市轨道交通大国。但是由于城市轨道交通线路存在很多小半径曲线,为了提高车辆通过曲线的能力,减小过曲线时的轮轨磨耗及噪声,目前已经研究出了三种铁路车辆径向转向架,分别为自导向转向架、迫导向转向架以及主动径向转向架[2]。其中,自导向转向架结构简单且相对于普通转向架有着较好的曲线通过性能,但是在半径小于300 m的曲线上效果却并不明显,而迫导向转向架则有着比自导向转向架更为优秀的曲线通过性能[3]。对于主动径向转向架,已有很多学者进行了相关研究。田师峤[4]针对主动径向转向架提出了一种通过监测二系回转角来判断曲线半径进而控制作动器位移的控制方式。穆晓军等[5]提出了基于轮对冲角、纵向蠕滑力以及相对摇头角的控制策略。主动径向转向架理论上有着最优的径向控制效果,但其结构复杂,故障率高[6],尽管主动径向转向架是未来的一个主要发展方向,但目前综合看来,迫导向转向架依然有着不可替代的地位。
目前迫导向转向架的技术已非常成熟。邬平波等[7]针对米轨车辆提出了一种迫导向机构,并指出迫导向机构可以有效提高车辆曲线通过性能;鴨下庄吾等[8]提出了一种辅助导向装置使得迫导向转向架可以达到更好的径向效果;西班牙的Talgo公司也为其研制的Talgo-Pendular摆式列车的独立旋转车轮单轴转向架安装了迫导向机构以提高其曲线通过性能[9];刘宏友等[10]针对迫导向机构的等效间隙对客车动力学性能的影响进行了大量的计算分析,得出迫导向机构连杆间的等效间隙在3 mm时在小半径曲线上仍能起到很好的径向调节作用。 迫导向机构有着广泛的工程应用前景,但是由于迫导向转向架的结构一般都是用连杆机构使车体和轮对相连接,因此当车辆在低等效锥度或是低速的情况下发生车体蛇行失稳[11]时,车体的蛇行运动便会通过迫导向连杆机构直接传递给轮对,降低轮对的稳定性。ANDERSON等[12]通过研究发现,当车轮等效锥度小于0.1时,迫导向转向架极易发生失稳现象,且车辆的临界速度也随着等效锥度的减小而减小;GARCIA等[13]通过对比分析迫导向转向架和自导向转向架的直线稳定性以及曲线通过性能差异发现,相比于自导向转向架,迫导向转向架在大于半径250 m的曲线上能更好地降低轮轨磨耗,但由于其轮对受车体与转向架之间回转角的影响,稳定性降低的问题更为突出。为此,肖权益[14]通过仿真计算指出降低一系横向定位刚度可以改善低等效锥度下的车辆稳定性,但这样又恶化了高锥度磨耗轮下的稳定性,同时迫导向转向架的连杆机构削弱了二系的隔振效果,导致轮轨之间的振动也会向上传递使得车辆的平稳性与舒适度降低。因此可见,传统的迫导向机构虽然可以提高车辆的小半径曲线通过性能但不可避免地降低了车辆的稳定性以及平稳性。
基于上述研究背景和理论,本文提出了一种复合型径向机构,可以在自导向与迫导向之间切换,既可以在小半径曲线上有着优秀的曲线通过性能又可以提高车辆在直线或是大半径曲线上的稳定性。通过分析该液控径向机构的结构原理建立仿真模型,并与车辆多体动力学模型进行联合仿真,最后结合台架试验探究该机构对车辆系统动力学性能的影响。
1 复合型径向机构的结构及其工作原理
1.1 传统迫导向转向架的工作原理
传统迫导向转向架的结构如图1所示,其导向结构一般由四连杆机构组成,车体与转向架之间由连杆连接,将车体与轮对的相对回转角转化为纵向的位移传递给固定在构架侧边的导向转臂,导向转臂的下端有两根轴箱拉杆并分别与前后轮对轴箱相连。
该迫导向转向架的工作原理如图2所示。由于在车辆通过曲线时转向架会随着曲线转动,所以能使轮对在曲线上产生径向效果,但车体始终在与曲线相切的位置上,因此车体和转向架之间会产生相对回转角,此时曲线内侧与车体相连的连杆会带动构架上的导向转臂呈逆时针运动从而使得与轴箱相连的两个拉杆分别将轴箱向内拉,而曲线外侧则与曲线内侧的情况相反,两根轴箱拉杆将轴箱向外推,如此便可迫使两个轮对呈趋于径向的八字形姿态通过曲线[15]。
在迫导向转向架结构中,轮对是否能够更好地达到径向效果,关键在于导向增益系数的确定。如图2所示,理论导向增益系数g为相对回转角α与轮对所需转动角度β的比值,由于
α≈sin α=LR (1)
β≈sin β=bR(2)
式中,R为曲线半径;b为轴距的一半;L为车辆定距的一半。
因此理论导向增益系数为
g=βα=bL(3)
1.2 复合型径向机构的基本结构
相比于传统迫导向机构,复合型径向机构将传统迫导向连杆机构中与车体相连的连杆替换成一个液压装置,当该装置连通时,车体便可以将回转运动传递给轮对起到迫导向的作用,而当该装置断开时,车体与轮对便断开连接,车体与转向架之间的相对回转运动便无法直接影响轮对,此时仅有前后轮对通过轴箱拉杆相耦合,如此便起到了自导向的功能,其结构示意图见图3。
1.3 液压装置的基本结构及其工作原理
液压装置的结构示意图见图4,该装置由两个液压缸以及两个三位四通电磁换向阀组成,其中液压缸2内设置阻尼阀系。
该装置的工作原理为:当车辆通过曲线时,两个电磁换向阀通电后使得液压缸1与液压缸2连通,在曲线内侧车体会推动液压缸1的活塞杆向右运动从而通过油液将推力传递给液压缸2的活塞杆,继而带动构架上的转臂顺时针运动,如图4中红色实线箭头所示。而曲线外侧的装置运动与之相反。如此便可完成迫使轮对趋于径向的运动,此时便是迫导向模式。当车辆在直线上或是大半径曲线上行驶时,电磁换向阀断电,两个液压缸便断开联系,这时若发生车体蛇行,与车体相连的液压缸1的活塞杆带动油液流动但无法进入液压缸2将力传给其活塞杆,液压回路如图4中绿色点线箭头所示。同理液压缸2中的油液也仅会在内部进行循环,并且由于液压缸2中设置有阻尼阀系,可以充当一个纵向减振器以提升轮对的纵向刚度保证车辆有足够高的直线临界速度,液压回路如图4中蓝色划线箭头所示,此时便是自导向模式。
2 液压装置模型的建立以及阻尼特性分析
2.1 液压装置数学模型的建立
为了研究该液控径向机构能否使得车辆在曲线上具有良好的通过性能,以及它对车辆系统动力学性能的影响,根据液控装置的物理结构,建立了相应的数学模型。该模型的建立基于以下假设:①忽略油液的可压缩性以及惯性;②不考虑温度对油液属性的影响。
2.1.1 常通孔模型
根据孔口长度与孔口直径比值的不同,通孔可分为细长孔与薄壁孔,这里的常通孔选为薄壁孔[16],其流量公式为
qVc=CdAc2Δpcρ(4)
式中, Ac为孔口面积;ρ为油液密度;Δpc为油液在孔口两边的压力差;Cd为流量系数,一般Cd的取值范围为0.6~0.8。
由流量公式
qVc=vA(5)
可以得到常通孔在液压缸活塞在做拉伸或压缩时的压降:
Δpc1=v2A21ρ2C2dA2c
Δpc2=v2A22ρ2C2dA2c
A2=A1+A3(6)
式中,A1为液压缸有杆腔的截面积;A2为无杆腔的截面积;A3为活塞杆截面积;v为油液的流动速度;Δpc1为活塞杆压缩时的压降;Δpc2为活塞杆伸出时的压降。
2.1.2 阻尼阀模型
阻尼阀的本质为卸荷阀,当其两端的压差超过内部弹簧的预紧力时阀口便会打开,且阀口打开的大小随两端压差的增大而增大,直到弹簧达到极限位置时阀口便完全打开。这类可变节流孔的面积公式为
Az=
0 x<0
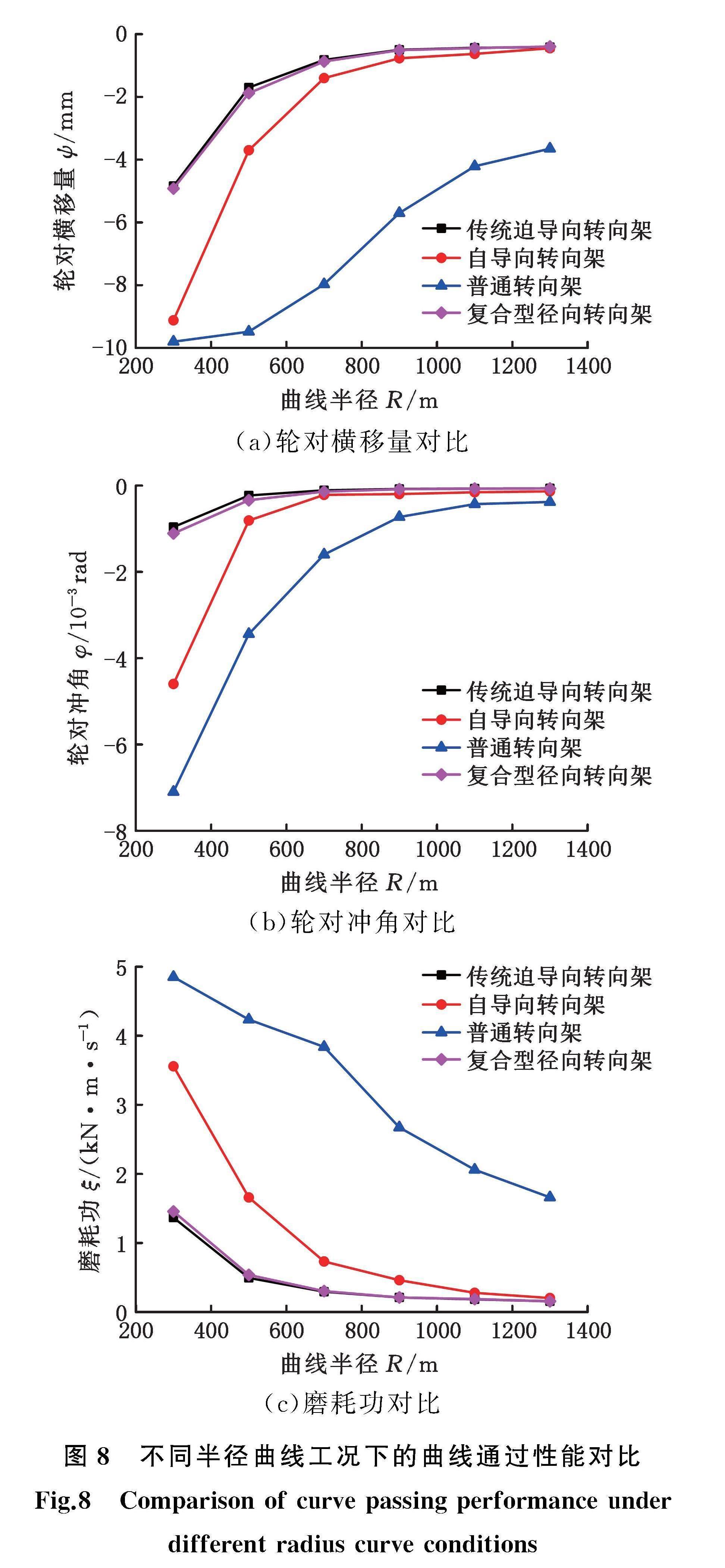
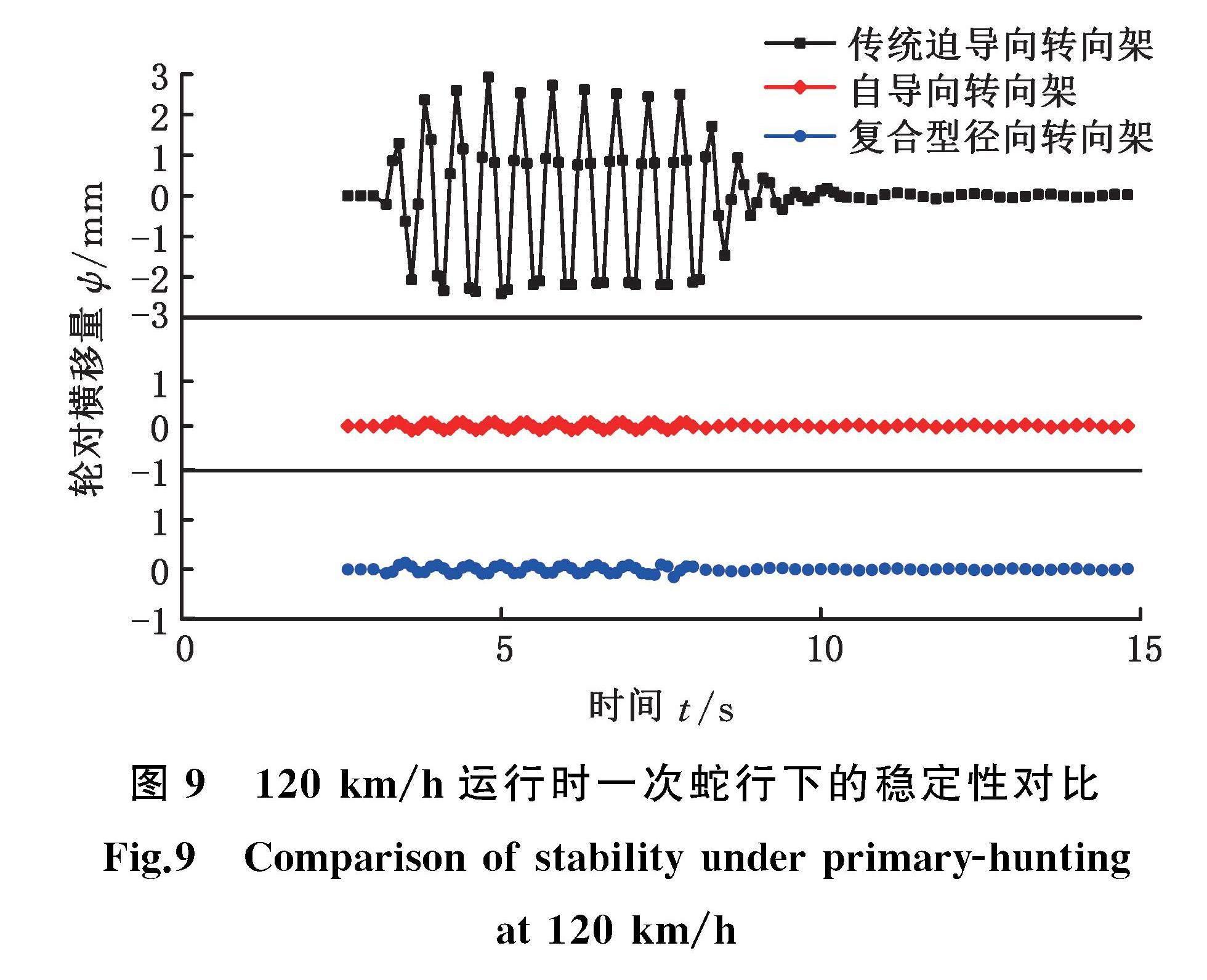
d2zarccosmdz-md2z-m20≤x πd2z2-d2zarccosmdz+md2z-m2 x2-x12≤x πd2z4x≥x2(7) x=4ΔFπd2z-x1(8) m=|dz-x|(9) 式中,dz为节流孔直径;x为开阀后弹簧的有效位移;x1为阀口开启时弹簧的位移;x2为阀口完全打开时弹簧的位移;ΔF为阻尼阀两端的压力差。 因此,油液在流经阻尼阀时的压力损失为 Δpc1=v2A21ρ2C2dA2z Δpc2=v2A22ρ2C2dA2z(10) 2.1.3 油液管路模型 由于该装置中存在较长的管路,因此产生的沿程压力损失便不得不考虑,其值与通过管路的流量有关。管路中的沿程压力损失为 Δpl=sgn(qV)λlρv2l2dl(11) qV=πd2l4vl(12) 式中, qV为管路中的流量;dl为管路的直径;l为管路长度;vl为管路中油液的流动速度;λ为沿程阻力系数。 2.2 液压装置的阻尼特性分析 当液压装置连通时,输入给液压缸1的活塞杆位移信号便是车体与径向机构铰接的纵向位移,其值为 xσ=DLR(13) 式中,D为径向机构横向跨距的一半。 而车体与径向机构铰接的纵向移动速度则为 vσ=xσvcμ(14) 式中,μ为缓和曲线长度;vc为车辆速度。 可见,当复合型径向机构处于迫导向模式时,其液压装置输入的位移速度与车辆速度和曲线半径相关,当车辆通过的速度越快、曲线半径越小时,液压缸1中的活塞杆移动速度越快。而由于液压装置中阀系的存在,活塞杆的位移速度越快则产生的回转阻尼力越大,这不利于车辆通过曲线,因此为了既满足复合型径向机构的径向能力,又可以给轮对提供足够大的纵向刚度,需要在铰接纵向移动速度最大时,产生较小的阻尼力。由于一般正线中最小的曲线半径为300 m,因此以极端情况为例,当曲线半径为300 m,运行速度为40 km/h,缓和曲线为50 m时,铰接的纵向移动速度为0.004 m/s。而液压装置断开连接后,为了防止作为纵向减振器的液压缸2油液压力过大引发安全问题,在仿真中采用0.1 m/s作为卸荷试验速度,以0.2 m/s作为完全卸荷的试验速度[17]。 对仿真模型输入幅值为0.025 m的谐波激励,分别以0.004, 0.050,0.100,0.150,0.200 m/s的速度进行仿真实验,并绘制该液压装置的非线性阻尼特性曲线,结果如图5所示。 由仿真结果可以看出,复合型径向机构在车辆通过曲线时产生的回转阻尼很小,不足以影响其径向功能,而在高频状态下可以有较高的动刚度,这便可以改善径向转向架纵向定位刚度过小导致的在直线上非线性临界速度过低的问题。 3 复合型径向机构对车辆动力学性能的影响 3.1 联合仿真模型的建立 基于SIMPACK多体动力学仿真软件,针对A型地铁车辆建立了无径向机构、传统迫导向以及复合型径向转向架的多体动力学模型,模型中的主要参数如表1所示,车轮采用LM踏面,钢轨为CN60轨。 为了便于分析,在建模过程中作出如下假设:①忽略径向机构中的间隙;②将机构的弹性视为集中在与轴箱相连的拉压杆上,其他的杆件视为刚体;③不考虑径向机构的质量;④假设迫导向机构的导向增益为理论增益值[18]。同时,径向机构与车体以及轴箱拉杆与轮对轴箱的连接处在SIMPACK软件中采用力元的形式建立,这样便可将该径向机构在曲线上产生的导向力直接施加在轴箱上,在发生振动时产生的阻尼力也可以反馈给车体和转向架。所建立的径向转向架动力学模型如图6所示。 利用MATLAB/Simulink进行SIMPACK动力学模型与液压装置模型的联合仿真(图7),MATLAB/Simulink从SIMPACK中获取液压装置上活塞杆的位移和加速度信号,经过控制模块判别,将径向机构所需动作的位移和加速度输入到液压装置模型中,最后再将液压装置输出的阻尼力和导向力输进SIMPACK的车辆动力学模型当中。所建立的仿真模型如图7a所示。 由式(13)可知,复合型径向机构中与车体相连的活塞杆位移大小由曲线半径大小决定,可以通过监测液压装置中液压缸1的活塞杆位移来判断车辆目前是在直线上运行还是在曲线上运行。若是在曲线上运行,则用活塞杆位移的大小来测算曲线半径的大小,并根据测算出的曲线半径来判断使用何种径向方式。然而当车体发生蛇形失稳时,车体和转向架会产生相对回转角位移,从而使得液压装置上的活塞杆同样会发生位移,为此,还需要监测液压缸1的活塞杆位移加速度来判断车辆是否发生失稳,通过式(14)可以推算出车辆在曲线上正常行驶时活塞杆位移加速度的最大值为0.2 m/s2,并将其设置为加速度阈值。若检测到的加速度信号超过阈值则判定为车辆失稳,此时复合型径向机构便会切换为自导向模式。 为使迫导向模式与自导向模式之间相互切换,采用开关式控制模块进行控制,使用Simulink中的if模块以及逻辑模块搭建控制模型,只有当测算出的曲线半径小于所设置的目标值且车辆未发生失稳时,复合型径向机构才会切换为迫导向模式,而其他时候为自导向模式,开关式控制流程如图7b所示。 3.2 曲线通过性能对比分析 为分析装有液控径向机构转向架的曲线通过性能,分别将复合型径向转向架、传统迫导向转向架、自导向转向架以及普通转向架在不同曲线工况下进行仿真试验。曲线工况的设置参考GB 50157—2013[19],具体的线路设置参数如表2所示。 图8所示为复合型径向转向架、传统迫导向转向架、自导向转向架以及普通转向架的一位轮对在六种曲线工况下的横移量、冲角以及磨耗功。 仿真结果表明:传统迫导向转向架的一位轮对的轮对横移量、轮对冲角以及磨耗功在小半径曲线上均明显小于自导向转向架和普通转向架,这种差距在300 m半径的曲线上最为显著,这时普通转向架的轮对横移量达到了最大值并发生了轮缘与钢轨的靠贴,其轮对冲角为7.1×10-3 rad、磨耗功为4.9 kN·m/s。相较于普通转向架,自导向转向架的横移量为9.1 mm,仅减小了7%;轮对冲角为4.6×10-3 rad,减小了35%;磨耗功为3.56 kN·m/s,减小了27%。而传统迫导向转向架的轮对横移量、轮对冲角以及磨耗功仅为4.9 mm、0.96×10-3 rad和1.37 kN·m/s,与普通转向架相比,数值减小了约50%、86%和72%。可见在小半径曲线上,传统迫导向转向架的曲线通过性能要明显优于自导向转向架的曲线通过性能。但当曲线半径达到1100 m时,传统迫导向转向架的轮对横移量、冲角以及磨耗功分别为0.43 mm、0.07×10-3 rad和0.18 kN·m/s,与自导向转向架的0.63 mm、0.15×10-3 rad和0.28 kN·m/s相比,两者的差距已非常小。因此可以得出在半径大于1000 m的曲线上,这两种径向转向架的曲线通过性能几乎一致。 而复合型径向转向架在迫导向模式下的径向效果与传统迫导向转向架几乎一致,仅当在半径小于700 m的曲线上运动时,其轮对横移量、冲角以及磨耗功会略高于传统迫导向转向架,这是因为曲线半径越小,径向机构所需提供的导向力越大,而过大的压力使得复合型径向机构中液压装置的活塞杆与液压缸之间发生油液内泄,因此径向效果会略逊于传统迫导向转向架,但依然远优于自导向转向架。 综上所述,复合型径向机构能够在小半径曲线上给车辆提供与传统迫导向机构几乎一样优秀的径向能力,可以大幅降低车辆在小半径曲线上的轮轨磨耗,提高车辆的曲线通过性能。而在大半径曲线上,不论复合型径向转向架切换为自导向模式还是迫导向模式都可以有着优于普通转向架的曲线通过性能。 3.3 蛇行运动稳定性对比分析 传统迫导向转向架虽然也有优秀的曲线通过性能,但是当在低等效锥度或低速的情况下,车体容易发生低频的蛇行失稳运动,而由于传统迫导向转向架的径向机构将车体与轮对相连,因此车体的蛇行失稳运动会通过迫导连杆向下传递,从而恶化车辆的稳定性。 为分析不同径向转向架在车辆发生一次蛇行时对稳定性的影响,分别让传统迫导向转向架、自导向转向架以及复合径向转向架在无轨道激励的直线路段上以120 km/h的速度进行仿真试验,并通过Simulink给SIMPACK输入外部激励信号以此对这三种车辆的车体施加一个初始的谐波激励,从而复现车体的蛇行失稳运动,然后通过观察轮对横移量及其收敛情况来判断这三种径向转向架的蛇行稳定性[20],仿真结果如图9所示。当给车体施加一个持续时长为5 s的谐波激励后,传统迫导向转向架的径向机构会将车体的蛇行运动直接传递给轮对,继而引发轮对有较大幅值的失稳现象,最大振幅达到了2.9 mm,在初始激励结束后其轮对经过3 s才彻底恢复稳定。而自导向转向架和复合型径向转向架仅会发生极小幅值的振动,两者的振幅均小于0.1 mm,并在激励结束后轮对横移量能迅速收敛。由此可以看出,复合型径向转向架可以有效缓解一次蛇行向下传递的问题。 虽然自导向转向架和复合型径向转向架均可以提高一次蛇行下的稳定性,但由于传统迫导机构给轮对提供了额外的纵向刚度,因此一般的自导向转向架往往有着低于传统迫导向转向架的临界速度。为验证复合型径向机构能否改善它在自导向模式下临界速度较小的问题,分别让这三种径向转向架在有随机轨道激励的直线线路上进行仿真试验,结果如图 10所示。可见,复合型径向转向架的非线性临界速度明显大于自导向转向架的非线性临界速度,而与传统迫导向转向架相比两者结果基本一致,证明复合型径向转向架在自导向模式下相比于传统自导向转向架可以有效提高其临界速度。 3.4 台架试验验证及结果分析 为验证装备有复合型径向机构的地铁转向架的蛇行稳定性能够满足目前地铁车辆的实际运行需求,并证明此径向机构具有实际工程应用价值,将该径向转向架置于机车车辆滚振试验台上进行试验。本试验台以液压驱动可转动的滚轮从而带动转向架轮对转动,并且滚轮可同时进行滚动和横向、垂向激振,从而模拟车辆在实际线路上的运行状态,最高试验速度高达600 km/h,滚振试验台如图11所示。 本次试验流程为将转向架先后分别加速到50,70,90,110,120,130,140,150 km/h这8个不同的速度,并在这些速度下施加一段时间的轨道激扰,轨道激扰谱为胶济谱,随后撤掉激扰测量轮对横移量能否收敛,以此判断车辆蛇行失稳临界速度。 处于150 km/h速度下的试验结果如图12所示。试验结果表明,该径向转向架在150 km/h速度时所有轮对的横移量均能在激扰结束后收敛,说明此径向转向架的蛇行失稳临界速度大于150 km/h,而目前我国地铁车辆运行速度一般不超过120 km/h,因此复合型径向转向架在临界速度上至少有着25%的安全阈度,能够满足地铁车辆的实际运行要求。 4 结论 本文提出了一种复合型径向机构并建立了该机构的数值仿真模型,通过联合仿真的方式研究了该机构在地铁车辆上的应用,并对比了该机构与其他两种常规径向机构对地铁车辆动力学性能的影响,最后进行了台架试验验证,可以得出以下结论: (1)复合型径向机构可以使转向架拥有与传统迫导向转向架一样良好的曲线通过性能,相较于常规的无径向机构,复合型转向架和自导向转向架有效减小了车辆通过曲线时的轮对冲角、轮对横移量以及磨耗功。 (2)复合型径向转向架能够通过液压装置活塞杆的位移以及加速度情况判断车辆目前运行的线路状况,能够在小半径曲线上变为迫导向模式,在大半径曲线或是直线上变为自导向模式, 相较于传统迫导向转向架大幅提升了车辆的稳定性。 (3)复合型径向机构中的液压装置可以提供一定的阻尼,可以在不影响曲线通过性能的基础上提高轮对的纵向刚度,这使得自导向模式下的非线性临界速度相较于传统自导向转向架得到了明显的提高,能够满足实际地铁车辆运行要求。 参考文献: [1] 冯爱军.中国城市轨道交通2021年数据统计与发展分析[J].隧道建设,2022,42(2):336-341. FENG Aijun. Date Statistics and Development Analysis of Urban Rail Transit in China in 2021[J]. Tunnel Construction, 2022,42(2):336-341. [2] 鴨下庄吾,刘丽杰.径向转向架的研制[J].国外铁道机车与动车,2021(3):24-28. KAMOSHITA S, LIU Lijie. Development of Radial Bogies[J]. Foreign Railway Locomotives and Motor Car, 2021(3):24-28. [3] 肖权益,池茂儒,梁树林.120 km/h A型地铁车辆径向转向架动力学性能研究[J].机械,2021,48(10):59-65. XIAO Quanyi, CHI Maoru, LIANG Shulin. Dynamics Performance of 120 km/h Type A Metro Vehicle Radial Bogie[J]. Machinery, 2021,48(10):59-65. [4] 田师峤,罗湘萍,任利惠,等.基于地铁车辆二系回转角的主动径向研究[J].机械工程学报,2018,54(24):147-153. TIAN Shiqiao, LUO Xiangping, REN Lihui, et al. Research on Active Radial of Rail Transit Based on the Yaw Angle of Second Suspension[J]. Journal of Mechanical Engineering, 2018,54(24):147-153. [5] 穆晓军,肖权益,李振乾,等.地铁车辆径向转向架主动控制策略研究[J].机械,2022,49(5):47-54. MU Xiaojun, XIAO Quanyi, LI Zhenqian, et al. Control Strategy of Metro Vehicle Active Radial Bogie[J]. Machinery, 2022,49(5):47-54. [6] 冯明.径向转向架研究综述[J].智慧轨道交通,2023,60(1):29-34. FENG Ming. Research Review on Radial Bogies[J]. Smart Rail Transit, 2023,60(1):29-34. [7] 邬平波,刘宏友,曾京,等.米轨客车迫导向转向架方案选型及动力学性能研究[J].铁道车辆,2001(2):7-9. WU Pingbo, LIU Hongyou, ZENG Jing, et al. Model Selection of the Forced Steering Bogie Scheme for Meter Gauge Passenger Cars and Research on Dynamic Performance[J]. Rolling Stock, 2001(2):7-9. [8] 鴨下庄吾,彭惠民.辅助导向技术在迫导向转向架上的应用[J].国外铁道车辆,2015,52(6):11-16. KAMOSHITA S, PENG Huimin. Application of the Assist Steering System for Forced Steering Bogie[J]. Foreign Railway Locomotives and Motor Car, 2015,52(6):11-16. [9] SRISKANDARAJAH C, JARDINE A K S , CHAN C K , et al. Maintenance Scheduling of Rolling Stock Using a Genetic Algorithm[J]. Journal of the Operational Research Society,1998,49(11):1130-1145. [10] 刘宏友,曾京,李文学.迫导向转向架导向机构参数对动力学性能的影响[J].铁道车辆,2002(7):1-4. LIU Hongyou, ZENG Jing, LI Wenxue. Effect of Parameters of Steering Mechanism of Forced Steering Bogies on Dynamic Performance[J]. Rolling Stock, 2002(7):1-4. [11] 韩辰辰. 车辆系统一次蛇行运动特性及抑制方法[D].成都:西南交通大学,2021. HAN Chenchen. Primary Hunting Behaviour and Suppression Methods of Vehicle Systems[D]. Chengdu:Southwest Jiaotong University,2021. [12] ANDERSON R J, FORTIN C. Low Conicity Instabilities in Forced-steering Railway Vehicles[J]. Vehicle System Dynamics, 1988, 17(S1):17-28. [13] GARCIA J F, OLAIZOLA X, MARTIN L M, et al. Theoretical Comparison between Different Configuration of Radial and Conventional Bogies[J]. Vehicle System Dynamics, 2000, 33(4):233-259. [14] 肖权益. 地铁车辆主动径向转向架控制策略及动力学优化研究[D]. 成都:西南交通大学,2022. XIAO Quanyi. Research on Control Strategy and Dynamic Optimization of Metro Vehicle with Active Radial Bogie[D]. Chengdu:Southwest Jiaotong University,2022. [15] 刘宏友,李莉,李文学.杠杆式迫导向转向架动力学性能研究[J].中国铁道科学,2002(3):39-46. LIU Hongyou, LI Li, LI Wenxue. Dynamics Performance of Radial Bogie with Forced-steering Levers[J]. China Railway Science, 2002(3):39-46. [16] LICHTAROWICZ A, DUGGINS R K, MARKLAND E, et al. Discharge Coefficients for Incompressible Non-cavitating Flow through Long Orifices[J]. Journal of Mechanical Engineering Science, 2006, 7(2):210-219. [17] 朱晨,池茂儒,赵明花,等.连通式横向减振器在地铁车辆上的适用性分析[J].中国机械工程,2023,34(6):660-667. ZHU Chen, CHI Maoru, ZHAO Minghua, et al. Applicability Analysis of Connected Transverse Damper in Metro Vehicles[J]. China Mechanical Engineering, 2023, 34(6):660-667. [18] 刘玉卿,史炎.重载货车迫导向转向架动力学分析[J].中国科技信息,2017(18):74-75. LIU Yuqin, SHI Yan. Dynamic Analysis of Forced-steering Bogies for Heavy-duty Vehicle[J]. China Science and Technology Information, 2017(18):74-75. [19] 中华人民共和国住房和城乡建设部,中华人民共和国国家质量监督检验检疫总局.地铁设计规范:GB 50157—2013[S].北京:中国建筑工业出版社,2014. Ministry of Housing and Urban-Rural Development of the Peoples Republic of China, General Administration of Quality Supervision, Inspection and Quarantine of the Peoples Republic of China. Subway Design Specification:GB 50157—2013[S]. Beijing:Construction Industry Press of China,2014. [20] 罗仁, 石怀龙. 铁道车辆系统动力学及应用[M]. 成都:西南交通大学出版社, 2018:224-266. LUO Ren, SHI Huailong. Dynamics and Application of Railway Vehicle System[M]. Chengdu:Southwest Jiaotong University Press, 2018:224-266. (编辑 王艳丽) 作者简介: 郑 阳,男,2000年生,硕士研究生。研究方向为铁道车辆系统动力学。E-mail:754343169@qq.com。 池茂儒(通信作者),男,1973年生,教授、博士研究生导师。研究方向为车辆系统动力学。E-mail:cmr2000@163.com。
