基于动态驾驶模拟器的底盘虚拟调校
2024-07-02李世杰曹振乾王伟王吉亮高磊
李世杰 曹振乾 王伟 王吉亮 高磊
【摘要】为解决传统汽车底盘调校试验周期长、成本高、安全性低的问题,提出了采用动态驾驶模拟器进行底盘虚拟调校的试验方法。底盘虚拟调校与实车底盘调校车辆的动力学主客观试验对比结果表明,采用动态驾驶模拟器底盘虚拟调校能够替代传统的实车底盘调校。
主题词:驾驶模拟器 底盘调校 虚拟现实
中图分类号:U463.1 文献标志码:A DOI: 10.19620/j.cnki.1000-3703.20230060
Virtual Chassis Tuning Based on Dynamic Driving Simulator
【Abstract】In order to address the issue of long cycle, high cost and low safety of traditional vehicle chassis tuning test, this paper proposes a test method of virtual chassis tuning using dynamic driving simulator. By comparing the subjective and objective test results of vehicle dynamics between virtual chassis tuning and real vehicle chassis tuning, it is shown that the virtual chassis tuning of dynamic driving simulator can achieve the same effect compared with the traditional real chassis tuning.
Key words: Driving simulator, Chassis tuning, Virtual reality
1 前言
动态驾驶模拟器是一种模拟真实车辆运动的台架测试设备。专业测试人员可以通过动态驾驶模拟器进行虚拟的车辆性能主观评价。底盘调校是基于专业测试人员对车辆性能的主观评价结论,调整底盘部件规格参数,并不断迭代最终达到性能目标的过程。该方法可大幅缩短研发周期、降低研发成本、提高试验安全性。
田顺等[1]基于智能汽车和交通安全等领域对驾驶模拟技术的发展需求,探讨了驾驶模拟器技术的不足和最新应用。Carl等[2]验证了驾驶模拟器用于操纵稳定性主观评价与真实车辆相近。Andrew Hamish[3]针对驾驶模拟器运动平台的标定进行研究,给出了运动平台标定参数选择与取值的建议。涂辉招等[4]通过构建晴、雾天气下2个自由驾驶试验场景,对比分析了8自由度和零自由度驾驶模拟器对自由驾驶变速行为、期望速度等变量的影响。
当前针对使用动态驾驶模拟器进行底盘虚拟调校的研究较少,因此本文针对该问题进行可行性论证。
2 参数化实时车辆动力学模型搭建
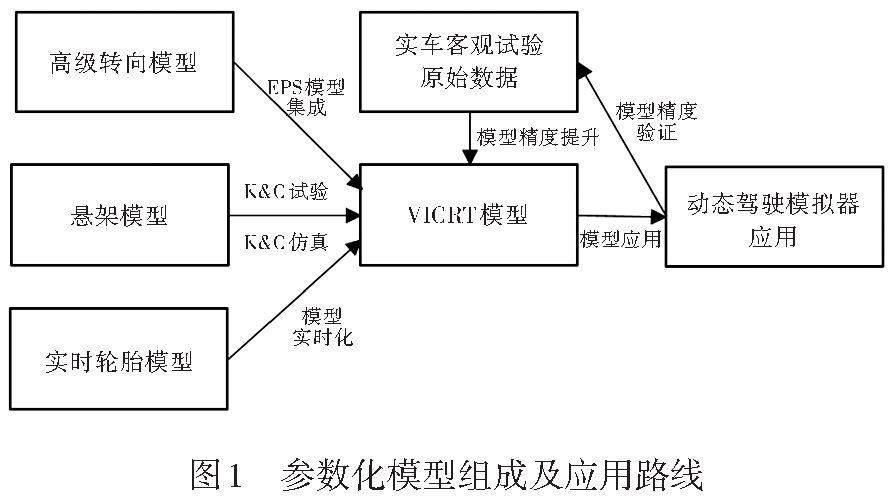
由于传统多体动力学模型建立过程复杂、所需参数和零部件特性较多,且由于模型自由度较多,求解效率较低,无法满足驾驶模拟器的在环实时仿真要求。为解决上述问题,本文搭建了基于VI-CarRealTime(VICRT)软件的高精度参数化实时模型,如图1所示。该模型包括3个子模型:高级转向系统模型、悬架系统模型、实时轮胎模型。该模型仅考虑系统的外部特性,不包含底盘结构和零部件属性,结构较为简单,解算效率较高。
2.1 高级转向系统模型
为使驾驶员的驾驶感受更真实,需要在搭建转向系统模型时充分考虑所有的系统特性,故搭建了考虑系统刚度、系统摩擦力、系统阻尼等物理参数的高级转向系统模型;同时采用用户数据报协议(User Datagram Protocol,UDP)通信技术进行电动助力转向系统(Electric Power Steering,EPS)电控模型集成,实现复杂场景下的联合仿真。
2.1.1 转向系统模型建立
转向系统物理模型建立分为基础模型搭建和高级参数辨识2部分[5]。为了将轮胎受力转换为转向拉杆力,进而通过齿轮传递至转向盘,基础模型建立需获取车辆转向横拉杆相关硬点空间参数。
应用VICRT软件建立计算转向盘手力矩的基础转向模型,模型原理如图2所示,图中[Tswa]为转向盘力矩,[?τ]为齿条位移增量,[Frack]为转向器齿条推力。
转向主销力矩的计算公式为:
Mk=r·Ft (1)
式中:[Mk]为主销力矩,[r]为主销轴与转向横拉杆外点的距离,[Ft]为转向横拉杆力。
需要对左、右侧车轮相连的横拉杆力分别进行计算:
式中:[?θ]为主销轴线旋转角增量,[FtL]为左侧拉杆力,[FtR]右侧拉杆力,[MkL]为左侧主销力矩,[MkR]右侧主销力矩,[?θL]为左侧主销转角增量,[?θR]为右侧主销转角增量。
转向盘力矩计算公式为:
式中:[?θswa]为转向盘转角增量;[Frack]为转向器齿条推力,为[FtL]和[FtR]的和。
基于VICRT设计的转向模型需考虑转向系统刚度、摩擦特性、阻尼特性等高级物理参数,获取这些参数需通过转向系统和零部件试验进行测试和辨识,辨识过程如图3所示。
2.1.2 电动助力转向控制模型的集成
建立基于UDP通信协议的人在环复杂模型接入测试方法,实现多系统联合仿真,同时保证转向系统,如转向盘主动回正、阻尼补偿、摩擦补偿等高级功能得以实现。EPS集成过程如图4所示。
2.2 悬架系统模型
基于VICRT设计的悬架模型采用参数化建模的方式,通过多体动力学模型仿真,计算悬架的运动学与弹性运动学特性,再通过VICRT提供的接口模块,自动生成参数化悬架系统模型。
2.3 轮胎实时仿真模型
本次虚拟调校的轮胎平顺性模型采用FTire模型,为满足实时仿真的要求,利用FTire HIL特性通过削减轮胎有限元网格减少计算时间。轮胎模型实时化转化的流程包括路面格式确认、CRT求解器参数调整及FTire模型文件处理。
完成实时化转化的轮胎平顺性模型可以用于DIL/HIL仿真测试,进一步提升虚拟调校的精确性。
3 底盘虚拟调校试验
3.1 试验准备
本文采用的驾驶模拟器由9自由度运动平台座舱、视景系统和计算机控制系统3部分组成。评价人员通过对模拟器进行驾驶行为输入,由控制系统计算车辆运动响应参数,最后由运动平台模拟输出车辆的响应。
通过对驾驶模拟器运动平台控制参数的标定,使驾驶模拟器达到和真实车辆相近的运动特性。运动平台控制参数及标定结果如表1所示。
3.2 试验过程
3.2.1 评价路面选取
选取高速公路、车辆动力学测试区(Vehicle Dynamic Area,VDA)、综合操控路和舒适性路为底盘虚拟调校的评价路面。
高速公路用于评价动态驾驶模拟器的直行操纵稳定性和变线操纵稳定性;车辆动力学测试区用于评价动态驾驶模拟器的弯道极限稳定性;综合操控路用于评价动态驾驶模拟器的操纵稳定性综合性能;舒适性路用于评价动态驾驶模拟器的平顺性。
3.2.2 底盘虚拟调校
按照弹簧、缓冲块、稳定杆、减振器的顺序依次进行底盘虚拟调校。调整弹簧刚度和缓冲块长度,优化起伏的位移控制以及车辆的俯仰平衡;调整稳定杆刚度,优化侧倾角度与前后平衡,以及前后的抓地力平衡。调整减振器速度特性的阻尼力曲线,优化操纵稳定性和平顺性。
3.3 试验结果
通过底盘虚拟调校试验,确定了弹簧、稳定杆、缓冲块和减振器特性参数的值,如表2所示。
4 底盘虚拟调校试验验证
为验证底盘虚拟调校效果,进行底盘虚拟调校的主观评价驾驶员也同样进行实车调校试验。最后,依据虚拟调校结果与实车调校结果试制出2套样件,先后装配到同一台量产车上,进行2次车辆动力学主客观测试,并对测试数据进行对比。
4.1 车辆参数
试验所用车型为一辆小型SUV,整车主要参数如表3所示。
4.2 客观评价
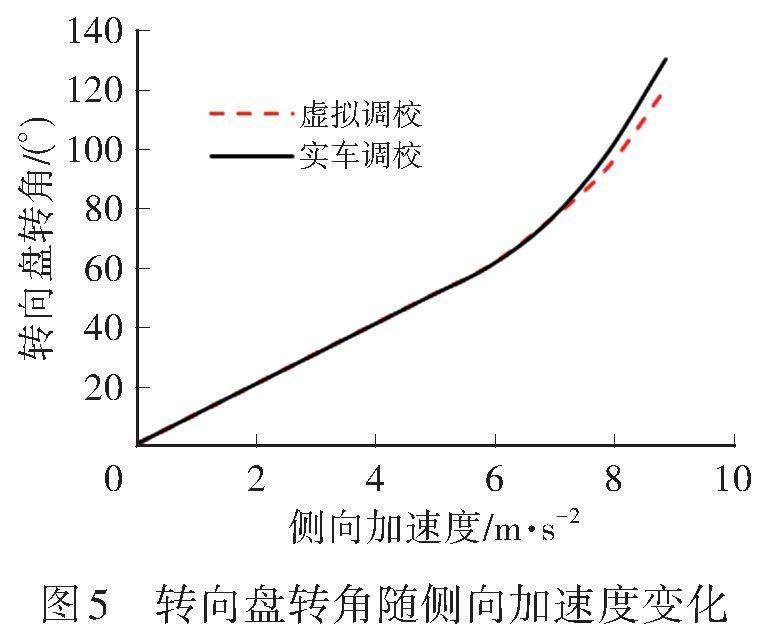
4.2.1 稳态客观测试
稳态客观测试采用ISO 4138:2012试验标准中规定的定车速缓慢增加转向盘转角试验方法[6]。试验车速为100 km/h,对转向盘转角梯度、质心侧偏角梯度和侧倾角梯度进行测量。线性域指标如表4所示,非线性域指标如图5、图6所示。
4.2.2 瞬态客观测试
瞬态客观试验采用ISO 7401∶2011试验标准中规定的连续正弦输入试验方法[7],试验车速为100 km/h,对频率特性进行了测试,得出横摆角速度谐振频率、谐振峰水平、响应延迟时间。实车调校和虚拟调校的结果对比如表5所示,横摆角速度增益随频率的变化如图7所示。
4.2.3 平顺性测试
平顺性测试采用公司内部试验标准,分为随机路面工况和脉冲冲击工况。
在随机路面工况中对座椅导轨Z向加速度、俯仰角加速度和侧倾角加速度进行测量,试验车速为60 km/h,试验结果见表6,加速度均方根值随频率的变化如图8~图10所示。
脉冲冲击工况对座椅导轨Z向加速度峰值、Z向加速度衰减时间进行测量,试验车速为30 km/h,试验结果如表7所示。
4.3 主观评价
从操纵稳定性和平顺性2个方面对车辆动力学性能进行主观评价,打分系统采用10分制[8]。
实车调校和底盘虚拟调校操纵稳定性主观评价的对比结果如表8所示。
评价结果表明,底盘虚拟调校在操纵性和稳定性方面优于实车调校。具体表现在虚拟调校样车的中心区响应速度更快,柔性感减弱。瞬态响应延迟与实车调校相当,但弯道响应的线性感更好。虚拟调校的极限不足转向度较小,侧倾角较小,前后平衡更好。
实车调校和底盘虚拟调校平顺性主观评价的对比结果如表9所示。
评价结果表明,虚拟调校在平顺性方面稍差于实车调校。具体表现在虚拟调校的车身控制略紧,俯仰和侧倾动作较快,在破损路面上触感偏硬。
5 结束语
客观验证结果显示,虚拟调校操稳指标与实车调校基本相当,且在非线性域内的不足转向度、质心侧偏角以及侧倾梯度方面优于实车调校。但在平顺性方面,虚拟调校结果的俯仰和侧倾角加速度均方根值,以及脉冲冲击下的加速度峰峰值均大于实车调校。
主观评价验证显示,虚拟调校的操纵稳定性优于实车调校,而平顺性方面稍差于实车调校。主客观试验结果呈现出了较高的相关性。虚拟调校平顺性的主客观试验结果虽然不及实车调校,但也达到了项目性能目标要求。
在运动平台控制参数精确标定和提供高精度实时车辆动力学模型的前提下,采用动态驾驶模拟器进行底盘虚拟调校可以替代传统的实车底盘调校,解决了传统汽车底盘调校试验周期长、成本高、安全性低的问题。
参 考 文 献
[1] 田顺, 谷亚蒙, 魏郎, 等. 驾驶模拟器的发展历程及最新应用实例[J]. 汽车技术, 2018(4): 35-42.
TIAN S, GU Y M, WEI L, et al. The Development of Driving Simulator and the Latest Application of Technology[J]. Automobile Technology, 2018(4): 35-42.
[2] Carl A E, JOSU D C. Validation of A Moving Base Driving Simulator for Subjective Assessments of Steering and Handling[D]. G?teborg: Charlmers University of Technology, 2015.
[3] HAMISH A, JAMSON J. Motion Cueing in Driving Simulators for Research Applications[D]. Leeds: The University of Leeds Institute for Transport Studies, 2010.
[4] 涂辉招, 李振飞, 孙立军. 驾驶模拟器运动系统对自由驾驶行为的影响分析[J]. 同济大学学报(自然科学版),2015, 43(11): 1696-1702.
TU H Z, LI Z F, SUN L J. Effects of Motion System of Driving Simulator on Free Driving Behaviors[J]. Journal of Tongji University (Natural Science Edition), 2015,43(11): 1696-1702.
[5] 郭雪凯. 电动助力转向系统建模仿真及试验分析[D]. 长沙: 湖南大学, 2016.
GUO X K. Modeling, Simulation and Test of Electric Power Steering System[D]. Changsha: Hunan University, 2016.
[6] ISO. Passenger Cars-Steady State Circular Driving Behavior-Open Loop Test Methods:ISO 4138: 2021[S]. Switzerland: International Standard Organization, 2021.
[7] ISO. Road Vehicles-Lateral Transient Response Test Methods-Open Loop Test Methods:ISO 7401: 2011[S]. Switzerland: International Standard Organization, 2011.
[8] 吴礼军, 管欣. 汽车整车性能主观评价[M]. 北京: 北京理工大学出版社, 2016.
WU L J, GUAN X. Automobile Vehicle Performance Subjective Evaluation[M]. Beijing: Beijing Institute of Technology Press, 2016.
