基于无人机遥感的作物长势监测研究进展
2024-06-03赵胜利MujahidHussain王国宾卞志豪王猛兰玉彬
赵胜利 Mujahid Hussain 王国宾 卞志豪 王猛 兰玉彬

摘要:无人机遥感技术作为一种新型的农业技术,为精准农业领域的发展提供了重要的技术支持。与传统监测方法相比,无人机遥感具有成本低、时效性强、无大气干扰、分辨率高等优点,为农业信息采集提供了新的工具。无人机农业遥感技术能够高效、无损地精确采集农业遥感数据,对作物长势进行实时监测,为农业生产提供重要的获取空间数据途径。近年来,随着无人机技术和遥感技术的不断发展和成熟,无人机农业遥感技术的应用范围逐步扩大,涵盖了作物生长监测、精准施肥、精准灌溉、病虫害预警等多个领域。本文重点介绍无人机遥感技术在作物生长监测中的应用,主要介绍了无人机遥感系统的组成、无人机遥感平台和传感器的类型和特点、基于无人机遥感图像数据处理的关键步骤以及作物长势监测的重要指标,综合评估了无人机遥感技术在作物长势监测方面应用的研究现状和存在的问题旨在为后续的无人机遥感技术在作物长势监测中的研究提供参考。
关键词:无人机;遥感;农业;长势;应用进展
中图分类号:S127 文献标志码:A
文章编号:1002-1302(2024)08-0008-07
收稿日期:2023-05-11
基金项目:山东省自然科学基金(编号:ZR2021QC154);山东省引进顶尖人才“一事一议”专项经费资助项目(编号:鲁政办字[2018]27号)。
作者简介:赵胜利(1998—),女,河南长葛人,硕士研究生,研究方向为棉花产量估测模型。E-mail:21403010286@sdut.edu.cn。
通信作者:兰玉彬,博士,教授,博士生导师,研究方向为精准农业航空应用技术。E-mail:ylan@sdut.edu.cn。
无人机农业遥感技术是将无人机与遥感技术相结合,用于对农田进行高精度、高分辨率的遥感监测和数据采集的技术[1]。其以无人机为平台,搭载数码相机、多光谱相机、高光谱相机等多种传感器,为农情信息的收集提供数据支持,是精准农业研究的重要发展方向之一[2-4]。相比卫星遥感和航空遥感,无人机遥感具有成本低廉、時效性强、不受大气影响、高分辨率等特点,而且相较于传统监测方法,无人机遥感的效率更高,且不会造成破坏,为田块尺度的遥感应用研究提供了新的工具[5]。
20世纪60年代,美国国家航空航天局(NASA)开始使用航空无人机进行地球观测。20世纪90年代,一些农业遥感研究机构和个人开始尝试利用无人机获取农业信息,如农田土壤、作物生长状态等,以支持农业生产管理决策[6]。随着遥感技术的发展和无人机技术的不断成熟,农业遥感应用也开始逐步普及。21世纪初,无人机农业遥感技术开始进入技术提升期。无人机的使用成本逐渐降低,机身体积不断缩小,搭载的传感器和相机也变得更加高精度和多样化[7]。农业遥感应用也从单一的作物长势监测拓展到作物长势、精准施肥、精准灌溉等多个领域。根据国际无人机协会的计算,2015—2025年,无人机在民用领域的应用将为美国经济贡献821亿美元,其中80%以上将直接来自农业[8]。虽然我国的遥感技术起步较晚,始于20世纪80年代,但是过去几十年来发展迅速,取得了不少研究成果,目前已经成为我国农业生产和农村发展的重要支撑技术之一[9-11]。
及时监测和预测农作物长势是提高农业生产效率的有效途径。无人机遥感技术通过对作物生长过程中的环境因素、物理指标和生化参数等进行实时或定期监测,来评估和预测作物的生长情况和生产潜力[12-14],指导农业生产和管理决策,不仅优化了作物生长环境和生产方式,且提高了作物产量和品质,降低了农业生产成本和减少了资源浪费[1,15]。
近5年来,利用较低成本的飞行器和搭载载荷范围内的相机获取作物信息的手段越来越普遍。遥感技术在农业领域目前主要应用于田间作物生长状况监测及产量预测、病虫灾害的预警与防治等,其让农业的发展更加智能化、自动化[7,16-17]。
本研究从无人机遥感平台、传感器类型及特点、遥感图像数据处理、作物生长监测主要指标等方面综述了无人机遥感在农业领域的应用进展,并对无人机遥感的发展趋势进行了探讨,以期为农业生产提供更好的理论和技术支持。
1 无人机遥感系统概述
本研究涉及的无人机指农业领域应用较多的轻小型民用无人机,侦查、作战的军用无人机不在讨论范围内。
1.1 无人机遥感系统
无人机遥感系统组成如图1所示,主要包括无人机平台、遥感设备、数据传输和存储系统、数据处理系统等组成部分[18-19]。无人机平台通过搭载各种遥感设备实现数据的采集和传输;遥感设备包括光学相机、多光谱相机、激光雷达等,可实现高精度、高分辨率的遥感数据采集和处理;数据传输和存储系统能完成遥感数据的传输、存储和处理;数据处理系统用于对遥感数据进行处理和分析。
1.2 无人机平台
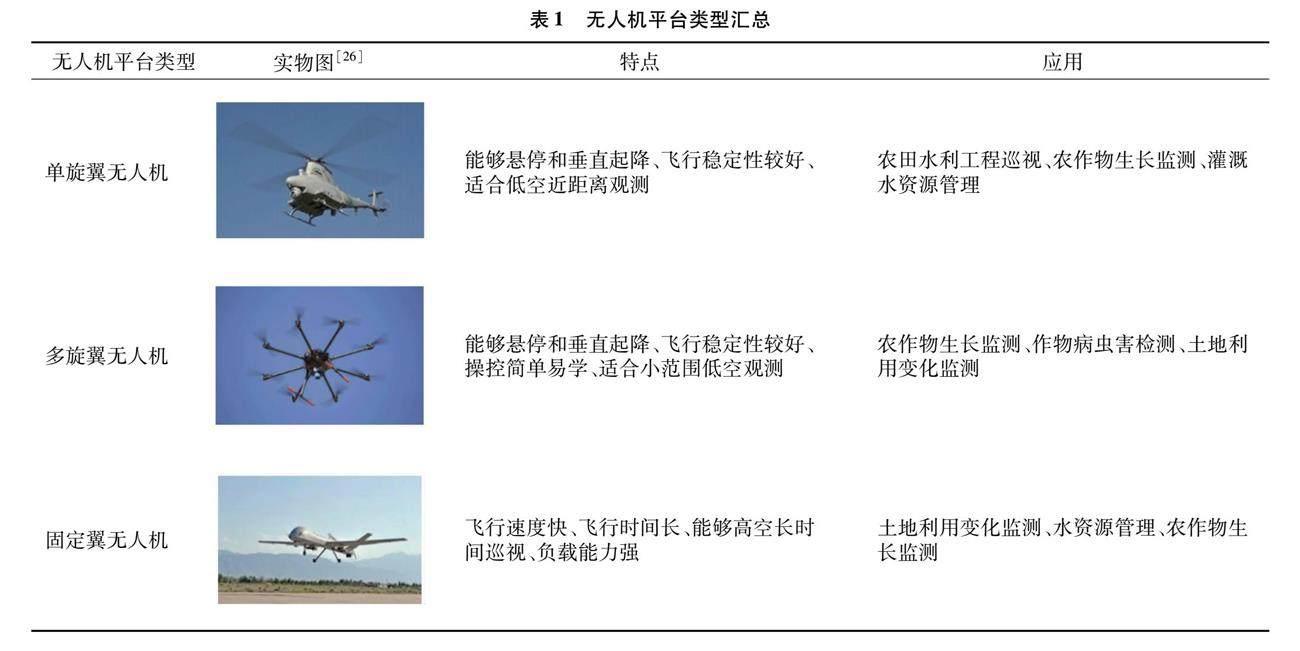
无人机已经成为现代农业监测中非常重要的工具。小型无人机的有效载荷为10 kg以下,最大飞行速度不超过33m/s,最大飞行高度在3km以
内[20]。选择何种类型的无人机平台取决于农业监测的具体要求和场景,例如飞行距离、携带载荷、传感器负载和预算。在以上方面的综合考虑之下,多旋翼无人机和轻小型固定翼无人机是目前农业领域中最常用的无人机平台[5,21]。表1中为常见的无人机平台。旋翼类无人机做到了无需跑道起降,且可在执行任务过程中定点悬停,飞行姿态灵活调整,传输清晰实时动态影像,因而在注重任务细节和质量的行业得到越来越多的青睐[22-23]。与固定翼无人机相比,旋翼无人机的硬件结构更加复杂,系统稳定性和抗风能力不如固定翼无机,其操作员的技术水平也更高[24-25]。
1.3 遥感传感器的分类
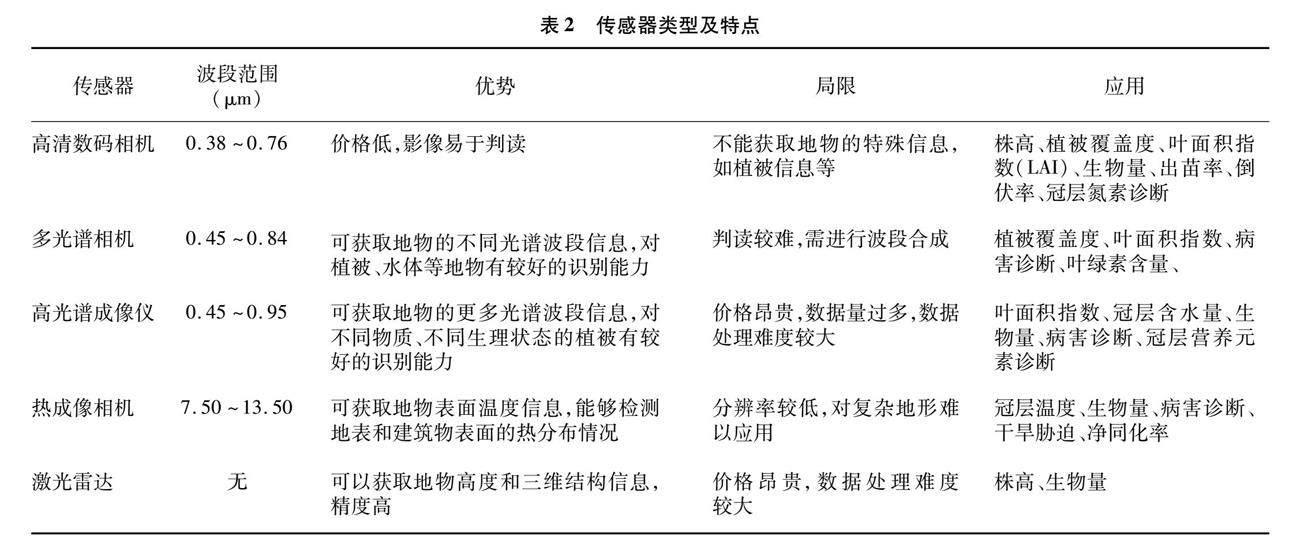
无人机遥感传感器主要有数码相机、多光谱和高光谱相机、热红外扫描仪及激光雷达等[27-28],具体见表2。通过数据传输及处理系统可生成载有遥感信息的影像及相关数字模型、光谱指数等遥感成果,这些产出结果在农业生产管理中可应用于农作物长势监测 。由于无人机的载荷量有限,目前应用于无人机农业遥感信息获取的传感器主要是高清数码相机和多光谱相机[29]。高光谱成像仪虽有几百个甚至更多波段,但由于数据量庞大及较高的成本,在农业领域得到广泛应用还需要从海量的数据中进一步挖掘有用信息[30]。
2 信息获取与数据处理
无人机遥感监测技术可以快速、高效地获取农田信息,对于农业监测有着重要的应用价值[31]。目前,无人机遥感监测技术的应用已经逐渐普及,但是如何更高效地处理无人机遥感数据来实现农业监测仍然是热点问题之一。
2.1 图像预处理
无人机遥感平台获取的影像预处理包括辐射校正[32]、几何校正[33]、图像配准[34]、图像去噪与增强等步骤。美国 MicaSense公司生产的ADC Lite多光谱相机、德国Cubert公司生产的UHD185 firefly高光谱相机均可使用设备自带的辐射校正板进行校正,此外常用的辐射校正方法还包括大气压缩校正法、基于地物实测反射率的经验线性法等。图像配准有2种主要配准方法:基于图像区域的配准方法和基于图像特征的配准方法[34]。基于图像区域的配准方法直接利用图像全部灰度信息进行配准,计算量大,效果较差,无法满足图像配准实时性需求[35]。随着机器视觉领域中图像特征处理算法的兴起,基于图像特征的配准方法因其计算量少、高效率、高精度的特点,引起专家学者的广泛关注。例如,SIFT(scale-invariant feature transform)算法[36]、SURF(speeded up robust features)算法[37]、PCA-SIFT(principal component analysis-SIFT)算法[38]等。
2.2 植被指数特征提取
由于植被结构和作物生理特性的多样性,不同作物的反射光谱存在较大差异。通过对无人机遥感影像不同波段的反射率进行线性或非线性组合得到的植被指数(VI)及其他指标来提取植被特征,是作物长势监测研究的热点之一[39]。由作物可见光波段构建的植被指数,如过绿指数(EXG)、可见光波段差异植被指数(VDVI)、超绿指数(EXG)、超绿超红差分指数(EXGR)、植被颜色指数(CIVE)等[40]。大量研究表明,红外波段、近红外波段中,农作物的光谱反射特征与其长势和产量相关性明显[20],如归一化植被指数(NDVI)、差值植被指数(DVI)、改进型植被指数(EVI)等[6,41]。其中,NDVI最为常用,NDVI值通常在-1~1之间,值越高代表植被覆盖度越高。相比多光谱数据,高光谱数据的光谱信息更為丰富,如转换叶绿素吸收指数(TCARI)、土壤调节植被指数(OSAVI)、比值光谱指数(RSI)、简单光谱指数(SSI)、重归一化植被指数(RDVI)、叶绿素吸收连续区指数(CACI)、连续体去除叶绿素吸收指数(CRCAI)等[42-44]。
2.3 长势参数反演
随着计算机技术在农业遥感领域的广泛应用,机器学习、深度学习等方法在作物长势监测方面的研究也得到快速发展。具体表现在:(1)数据源的选择从较为单一类型的可见光或多光谱,发展到目前应用较为广泛的高光谱数据、激光雷达数据、热红外数据等。(2)无论是在数据获取方法上还是在处理手段上都进行了大量有益的探索,尤其对于多源数据的整合、植被指数与反演指标之间的模型构建上,学者们从不同的角度尝试消除传统方法的局限,旨在提高模型反演精度。如高林等选择冬小麦冠层ASD光谱反射率数据作为评价无人机UHD185高光谱数据质量的标准,依次从光谱曲线变化趋势、光谱相关性以及目标地物光谱差异3个方面展开分析,结果表明,458~830 nm(第3~96波段)的UHD185光谱数据可靠,可使用其探测冬小麦LAI[45],为今后无人机UHD185高光谱数据的使用提供了参考。
2.4 反演方法与精度评价
一些常见的反演方法包括神经网络、支持向量机、回归模型等,具体见表3。模型构建完成后,需要对模型精度进行评价,大多数研究结合人工实测数据作为真实值,3个参数[决定系数(R2)、均方根误差(RMSE)、相对误差(RE)]评价分类识别精度。据大量研究结果可知,通常模型精度会随着参数个数的增加而提高,但过拟合的概率越大,因此不能仅凭单一标准来判断一种反演模型的优劣。
3. 作物长势监测的重要参数
在适当的生育期进行长势监测,能够及早发现作物生长中的问题,实施精准农业操作,从而提高作物产量和品质[46]。不同作物的叶绿素含量、氮素含量、细胞水分等存在显著差异,从而影响作物冠层的反射光谱。因此,构建精度高且通用性强的作物长势监测模型是应用无人机遥感技术进行精准农业的关键[47-48]。
3.1 叶绿素含量
叶绿素含量是反映植物光合作用效率的重要指标,对作物的蒸腾作用、光合作用以及农作物估产等具有重要意义。传统的测量方法为化学分析法,该方法耗时费力,不适合大范围监测。地面遥感平台中常用叶绿素仪测量作物叶片的叶绿素含量,作为真实验证数据。无人机遥感平台具有快速、无损、高精度的特点,更适合大范围监测。但有研究表明,无人机的飞行高度对作物的预测和反演精度有较大影响[49]。近20年来,基于遥感影像的大田作物叶绿素含量估测研究得到了快速发展[49-50]。研究者们多采用线性回归的方法,但该方法以变量之间存在线性关系为前提,或与实际情况存在偏差。线性回归模型的系数可以解释自变量和因变量之间的关系,然而对于复杂的数据集,便超出其适用范围。因此,目前研究人员已经偏向于用主成分分析、人工神经网络、深度学习等方法来反演作物生长参数,并结合高光谱遥感信息来构建包含更多波段的模型,从而更准确地解释模型预测的变化[51]。
3.2 含氮量
在氮素含量上,裴信彪等构建了自主研发的无人机结构与飞控系统,测试了4种施氮水平水稻的光谱指数变化规律,实现了水稻氮素水平的变化监测[52]。该研究中提出的飞行控制轨迹跟踪方法将为无人机研发领域的研究者们提供新的思路。王玉娜等利用无人机搭载高光谱相机对冬小麦进行遥感监测,通过分析冠层光谱参数与植株氮含量、地上部生物量和氮素营养指数的相关性,筛选出对三者均敏感的光谱参数,结合多元线性逐步回归、偏最小二乘回归和随机森林回归建立抽穗期冬小麦氮素营养指数(NNI)估测模型,该研究实现了小区范围内的氮素营养指数遥感填图,清晰地展示了冬小麦氮素的空间分布,为农作物的精准施肥和产量估算提供了理论依据[53]。Tao等利用搭载在无人机上的高光谱传感器获取植被指数和红边参数,基于植被指数、红边参数及其组合,采用逐步回归(SWR)和偏最小二乘回归(PLSR)方法对植被指数和叶面积指数进行精确估计,结果表明,植被指数与红边参数相结合,利用PLSR方法可以提高AGB和LAI的估计[54]。Yuan等提出了一种图像与光谱特征融合的玉米叶片氮含量预测模型,采用偏最小二乘回归和支持向量机回归(SVR)对玉米叶片氮含量进行预测,结果表明,与单变量模型相比,基于图像和光谱的融合模型预测效果更佳[55]。该研究结果证实了基于特征融合的方法一定程度上有助于提高模型的预测性能,为无人机低空遥感图像特征提取方法的选择提供了理论依据和指导。
3.3 含水量
利用无人机遥感进行农作物土壤含水量的反演研究相对较少,目前的研究采用的传感器主要是可见光相机、多光谱相机。针对于农作物冠层及叶片的复杂结构,魏青等基于不同时期冬小麦的无人机多光谱遥感图像,通过逐步回归法和强迫进入法建立了光谱反射率模型和植被指数模型,结果表明,基于逐步回归法的光谱指数模型效果最优,决定系数为0.83[56];以内蒙古玉米田为研究区,多光谱相机为遥感平台,张智韬等提出用机器学习的方法构建植被指数与土壤含水率的反演模型,结果表明,支持向量机方法的模型精度在0.851以上[57]。该研究对土壤含水率的反演研究有一定参考作用,未来需要在模型建立方法上进一步提高作物监测的适用性。最新的研究采用尺度转换法,将卫星遥感影像与无人机遥感影像相结合,采用 TsHARP 升尺度法和重采样升尺度法构建了土壤含水率反演模型,结果表明,2种方法均能提高模型反演精度,结合卫星遥感和无人机遥感二者的优势实现了高精度又大尺度的地表信息监测,为土壤含水率及其他遥感领域的研究提供了新的思路[58]。
3.4 叶面积指数
LAI是作物在生物和非生物胁迫下健康状况的重要依据,有助于作物生物量和产量的生成[59-60]。Zhang等基于小麦的光谱反射机制,开展其光谱指数与LAI的相关性分析,为小麦田间尺度的长势分析提供了支持,研究表明,随机森林法对LAI的估测具有较好效果,但对不同品种、不同水氮处理情况下的模型构建还有待深入研究[61]。曹中盛等实现了水稻不同品种、不同水氮处理情况下的研究,且于不同时期测定水稻 LAI,同步获取水稻无人机数码影像并提取颜色指数及纹理特征,构建了定量监测模型并进行检验,结果表明,无人机数码影像中颜色指数及纹理特征与水稻 LAI 之间的相关性在生育前期最高[62]。邵国敏等基于无人机多光谱影像数据,构建了植被指数与LAI的关系模型,结果表明,随机森林回归算法估算不同灌溉条件下的玉米LAI可行性较高,决定系数为0.74~0.87[59]。Yao等利用多光谱遥感系统,采集多光谱植被指数,通过不同的回归方法选出了最优LAI反演模型,发现无人机采集的数据检测玉米的LAI是可行的[63]。众所周知,作物的LAI具有高度的时空异质性,在准确获取田间尺度的LAI方面仍存在许多挑战:(1)在理论方法上应进行大胆创新,特别是在探索基于多源数据融合的作物LAI检索新方法方面。(2) 加强LAI遥感试验和数据积累,促进LAI业务研究和应用。
3.5 生物量
生物量是最常见的作物参数,国内外有众多学者做了大量关于无人机遥感监测植物地上生物量的研究。邓江等采集了棉花不同生育期的近红外影像,并提取4种光谱指数,构建了棉花主要生育期地上生物量的估算模型[64]。也有研究采用无人机多光谱影像结合作物水分利用效率模型的方法,探讨无人机遥感在玉米生物量反演方面的可行性,为无人机遥感监测玉米生物量提供了参考[58]。
总之,无人机遥感在叶绿素含量、生物量、含水量等作物长势监测中的研究取得了较多成果,由早期的无人机搭载可见光相机,到近年来的利用多光谱乃至高光谱相机等传感器获取无人机遥感影像进行信息提取、反演模型构建等手段,反演精度逐步提高,但这些成果距大规模实际应用还有一定距离。目前的研究对象主要集中于特定研究区或特定样本,多数研究成果与作物长势变化的内在机理联系不够紧密,还应加强对作物生长规律及模型普适性的相关研究。
4 讨论
近年来无人机农业遥感的图像处理技术与系统硬件都得到快速发展与广泛应用,并取得了丰硕成果,但同时也存在一些需要进一步深入探究或亟待解决的科学问题。具体表现在以下4个方面。
4.1 无人机续航能力有限
无人机续航能力的严重性不容忽视。续航能力决定了无人机的作业时间和范围,对长时间或大范围的任务来说,续航能力是至关重要的因素。无人机的续航时间不足,则需要多次起降和更换电池,大大降低了作业效率和效果。因此,提高植保无人机的续航能力,是农业生产中的一个重要课题,需通過提高电池能量密度、优化机身结构、改进动力系统等方式来实现。
4.2 大量遥感数据的快速处理较困难
无人机农业遥感技术可以获取大量的作物遥感数据,但是数据处理的难度较大。无人机在作物生长期间对作物进行多次拍摄,每次拍摄都会产生大量的图像和点云数据,包括作物的生长状态、植被指数等多个方面的指标,需要综合运用图像处理、点云数据处理、多传感器融合等多个技术手段对数据进行综合分析和解释。为了解决这些问题,需要运用计算机视觉、遥感图像处理、机器学习等技术手段对采集的数据进行处理和分析,提取有用信息,为农业生产提供科学依据。
4.3 亟待制定更精准的农用无人机的飞行作业标准
我国农业植保无人机行业作为近年来新起之秀,缺乏相关标准的约束会影响其未来发展。目前使用无人机仍然没有标准化的工作流程,虽然逐渐有一些行业标准、地方标准出台,但在农用无人机快速发展的背景下,无人机作业的相关规定依旧不够完善,单纯针对某一类作物的规范显然不足以满足植保无人机在农业各个领域的需求。
4.4 反演模型的普适性较低
遥感技术的优势在于能够提供多尺度、多角度、多波段、多时间的广泛地面观测数据。然而对于农业遥感,特别是作物生长监测,其关键属性如叶面积、生物量等在作物生长过程中不断变化,仅靠遥感数据很难保证观测的连续性。因此,大量研究将各种专业农业模型(如作物生长模型、地表能量平衡模型)与遥感数据相耦合或同化,以弥补遥感观测时间分辨率的不足。即便如此,反演模型依然存在普适性低下的问题,严重影响了无人机遥感技术在农业生产中的应用广度及深度。未来研究者们应加强多源数据融合技术的研发及通用模型的建立等方面的研究,为农业生产提供更好的决策和管理支持。
参考文献:
[1]Huang Y B,Chen Z X,Yu T,et al. Agricultural remote sensing big data:management and applications[J]. Journal of Integrative Agriculture,2018,17(9):1915-1931.
[2]劉建刚,赵春江,杨贵军,等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报,2016,32(24):98-106.
[3]胡健波,张 健. 无人机遥感在生态学中的应用进展[J]. 生态学报,2018,38(1):20-30.
[4]晏 磊,廖小罕,周成虎,等. 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报,2019,21(4):476-495.
[5]孙 刚,黄文江,陈鹏飞,等. 轻小型无人机多光谱遥感技术应用进展[J]. 农业机械学报,2018,49(3):1-17.
[6]Zhang H D,Wang L Q,Tian T,et al. A review of unmanned aerial vehicle low-altitude remote sensing (UAV-LARS) use in agricultural monitoring in China[J]. Remote Sensing,2021,13(6):1221.
[7]兰玉彬,邓小玲,曾国亮. 无人机农业遥感在农作物病虫草害诊断应用研究进展[J]. 智慧农业,2019,1(2):1-19.
[8]郭庆华,吴芳芳,庞树鑫,等. Crop 3D—基于激光雷达技术的作物高通量三维表型测量平台[J]. 中国科学(生命科学),2016,46(10):1210-1221.
[9]史 舟,梁宗正,杨媛媛,等. 农业遥感研究现状与展望[J]. 农业机械学报,2015,46(2):247-260.
[10]Wang G B,Lan Y B,Qi H X,et al. Field evaluation of an unmanned aerial vehicle (UAV) sprayer:effect of spray volume on deposition and the control of pests and disease in wheat[J]. Pest Management Science,2019,75(6):1546-1555.
[11]Zhan Y L,Chen P C,Xu W C,et al. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution[J]. Biosystems Engineering,2022,216:32-45.
[12]纪景纯,赵 原,邹晓娟,等. 无人机遥感在农田信息监测中的应用进展[J]. 土壤学报,2019,56(4):773-784.
[13]田 婷,张 青,张海东. 无人机遥感在作物监测中的应用研究进展[J]. 作物杂志,2020(5):1-8.
[14]韩文霆,李 广,苑梦婵,等. 基于无人机遥感技术的玉米种植信息提取方法研究[J]. 农业机械学报,2017,48(1):139-147.
[15]Wang L L,Zhao Y J,Liu S B,et al. Precision detection of dense plums in orchards using the improved YOLO v4 model[J]. Frontiers in Plant Science,2022,13:839269.
[16]杨国峰,何 勇,冯旭萍,等. 无人机遥感监测作物病虫害胁迫方法与最新研究进展[J]. 智慧农业(中英文),2022,4(1):1-16.
[17]Chen P C,Douzals J P,Lan Y B,et al. Characteristics of unmanned aerial spraying systems and related spray drift:a review[J]. Frontiers in Plant Science,2022,13:870956.
[18]Xiang H T,Tian L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV)[J]. Biosystems Engineering,2011,108(2):174-190.
[19]Yang G J,Liu J G,Zhao C J,et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping:current status and perspectives[J]. Frontiers in Plant Science,2017,8:1111.
[20]雷 剑. 轻小型无人机遥感在精准农业中的应用研究[J]. 农业与技术,2022,42(3):41-43.
[21]Petrescu R V,Aversa R,Akash B,et al. Unmanned helicopters[J]. Journal of Aircraft and Spacecraft Technology,2017,1(4):241-248.
[22]Segui-Gasco P,Al-Rihani Y,Shin H S,et al. A novel actuation concept for a multi rotor UAV[J]. Journal of Intelligent & Robotic Systems,2014,74(1):173-191.
[23]Cai G W,Lum K Y,Chen B M,et al. A brief overview on miniature fixed-wing unmanned aerial vehicles[C]//IEEE ICCA.Xiamen,China.IEEE,2010:285-290.
[24]Asadzadeh S,de Oliveira W J,de Souza Filho C R. UAV-based remote sensing for the petroleum industry and environmental monitoring:state-of-the-art and perspectives[J]. Journal of Petroleum Science and Engineering,2022,208:109633.
[25]Chen R Q,Zhang C J,Xu B,et al. Predicting individual apple tree yield using UAV multi-source remote sensing data and ensemble learning[J]. Computers and Electronics in Agriculture,2022,201:107275.
[26]馬代健. 无人机热红外图像采集系统开发与应用[D]. 杨凌:西北农林科技大学,2018.
[27]de Almeida C T,Galvo L S,de Oliveira Cruz e Arago L E,et al. Combining LiDAR and hyperspectral data for aboveground biomass modeling in the Brazilian Amazon using different regression algorithms[J]. Remote Sensing of Environment,2019,232:111323.
[28]Dimov D,Uhl J H,Lw F,et al. Sugarcane yield estimation through remote sensing time series and phenology metrics[J]. Smart Agricultural Technology,2022,2:100046.
[29]Franklin S E,Ahmed O S,Williams G. Northern conifer forest species classification using multispectral data acquired from an unmanned aerial vehicle[J]. Photogrammetric Engineering & Remote Sensing,2017,83(7):501-507.
[30]Li C C,Ma C Y,Cui Y Q,et al. UAV hyperspectral remote sensing estimation of soybean yield based on physiological and ecological parameter and meteorological factor in China[J]. Journal of the Indian Society of Remote Sensing,2021,49(4):873-886.
[31]郭庆华,胡天宇,刘 瑾,等. 轻小型无人机遥感及其行业应用进展[J]. 地理科学进展,2021,40(9):1550-1569.
[32]龚健雅,宦麟茜,郑先伟. 影像解译中的深度学习可解释性分析方法[J]. 测绘学报,2022,51(6):873-884.
[33]王斯健. 控制点图元库的卫星影像高精度几何校正方法研究[J]. 测绘通报,2021(增刊1):183-187.
[34]樊彦国,柴江龙,许明明,等. 基于ORB与RANSAC融合改进的图像配准[J]. 光学精密工程,2019,27(3):702-717.
[35]侯 瑞,邓少平,张立亚. 高分辨率SAR影像正射纠正试验[J]. 测绘科学,2015,40(10):153-156.
[36]Kumar P,Henikoff S,Ng P C. Predicting the effects of coding non-synonymous variants on protein function using the SIFT algorithm[J]. Nature Protocols,2009,4:1073-1081.
[37]江 智,江德港,黄子杰,等. 基于IB-SURF算法的无人机图像拼接技术研究[J]. 计算机工程与应用:2024,60(3):263-269.
[38]Chater A,Lasfar A. New approach to the identification of the easy expression recognition system by robust techniques (SIFT,PCA-SIFT,ASIFT and SURF)[J]. TELKOMNIKA (Telecommunication Computing Electronics and Control),2020,18(2):695.
[39]汪小钦,王苗苗,王绍强,等. 基于可见光波段无人机遥感的植被信息提取[J]. 农业工程学报,2015,31(5):152-159.
[40]Du M M,Noboru N,Atsushi I,et al. Multi-temporal monitoring of wheat growth by using images from satellite and unmanned aerial vehicle[J]. International Journal of Agricultural and Biological Engineering,2017,10(5):1-13.
[41]Zhong Y F,Wang X Y,Xu Y,et al. Mini-UAV-borne hyperspectral remote sensing:from observation and processing to applications[J]. IEEE Geoscience and Remote Sensing Magazine,2018,6(4):46-62.
[42]Feng L W,Zhang Z,Ma Y C,et al. Alfalfa yield prediction using UAV-based hyperspectral imagery and ensemble learning[J]. Remote Sensing,2020,12(12):2028.
[43]Yu F H,Xu T Y,Du W,et al. Radiative transfer models (RTMs) for field phenotyping inversion of rice based on UAV hyperspectral remote sensing[J]. International Journal of Agricultural and Biological Engineering,2017,10(4):150-157.
[44]兰玉彬,朱梓豪,邓小玲,等. 基于无人机高光谱遥感的柑橘黄龙病植株的监测与分类[J]. 农业工程学报,2019,35(3):92-100.
[45]高 林,杨贵军,于海洋,等. 基于无人机高光谱遥感的冬小麦叶面积指数反演[J]. 农业工程学报,2016,32(22):113-120.
[46]裴浩杰,冯海宽,李长春,等. 基于综合指标的冬小麦长势无人机遥感监测[J]. 农业工程学报,2017,33(20):74-82.
[47]林 娜,陈 宏,赵 健,等. 轻小型无人机遥感在精准农业中的应用及展望[J]. 江苏农业科学,2020,48(20):43-48.
[48]奚 雪,赵庚星. 基于无人机多光谱遥感的冬小麦叶绿素含量反演及监测[J]. 中国农学通报,2020,36(20):119-126.
[49]刘 涛,张 寰,王志业,等. 利用无人机多光谱估算小麦叶面积指数和叶绿素含量[J]. 农业工程学报,2021,37(19):65-72.
[50]周敏姑,邵国敏,张立元,等. 基于无人机遥感的冬小麦叶绿素含量多光谱反演[J]. 节水灌溉,2019(9):40-45.
[51]王 羿,丁鸣鸣,何 菁,等. 基于不同建模方法的土壤pH值无人机遥感影像反演[J]. 江苏农业科学,2022,50(14):224-231.
[52]裴信彪,吴和龙,马 萍,等. 基于无人机遥感的不同施氮水稻光谱与植被指数分析[J]. 中国光学,2018,11(5):832-840.
[53]王玉娜,李粉玲,王伟东. 基于无人机高光谱的冬小麦氮素营养监测[J]. 农业工程学报,2020,36(22):31-39.
[54]Tao H L,Feng H K,Xu L J,et al. Estimation of crop growth parameters using UAV-based hyperspectral remote sensing data[J]. Sensors,2020,20(5):1296.
[55]Yuan H H,Yang G J,Li C C,et al. Retrieving soybean leaf area index from unmanned aerial vehicle hyperspectral remote sensing:analysis of RF,ANN,and SVM regression models[J]. Remote Sensing,2017,9(4):309.
[56]魏 青,张宝忠,魏 征,等. 基于无人机多光谱遥感的冬小麦冠层叶绿素含量估测研究[J]. 麦类作物学报,2020,40(3):365-372.
[57]张智韬,谭丞轩,许崇豪,等. 基于无人机多光谱遥感的玉米根域土壤含水率研究[J]. 农业机械学报,2019,50(7):246-257.
[58]汤建栋. 基于无人机遥感的玉米水分利用效率与生物量估算方法[D]. 杨凌:西北农林科技大学,2021.
[59]邵国敏,王亚杰,韩文霆,等. 基于无人机多光谱遥感的夏玉米叶面积指数估算方法[J]. 智慧农业(中英文),2020,2(3):118-128.
[60]Li S Y,Yuan F,Ata-UI-Karim S T,et al. Combining color indices and textures of UAV-based digital imagery for rice LAI estimation[J]. Remote Sensing,2019,11(15):1763.
[61]Zhang Y M,Ta N,Guo S,et al. Combining spectral and textural information from UAV RGB images for leaf area index monitoring in kiwifruit orchard[J]. Remote Sensing,2022,14(5):1063.
[62]曹中盛,李艷大,黄俊宝,等. 基于无人机数码影像的水稻叶面积指数监测[J]. 中国水稻科学,2022,36(3):308-317.
[63]Yao X,Wang N,Liu Y,et al. Estimation of wheat LAI at middle to high levels using unmanned aerial vehicle narrowband multispectral imagery[J]. Remote Sensing,2017,9(12):1304.
[64]邓 江,谷海斌,王 泽,等. 基于无人机遥感的棉花主要生育时期地上生物量估算及验证[J]. 干旱地区农业研究,2019,37(5):55-61,69.
