名优茶智能化采摘关键技术研究进展
2024-05-30张巍赵帮泰杨昌敏程方平王义鹏宋乐见
张巍 赵帮泰 杨昌敏 程方平 王义鹏 宋乐见

摘要:茶叶生产作为劳动密集型产业急需标准化和机械化,无论是大宗茶还是名优茶,都需要实现机械化采摘才能满足日益增长的生产需求。随着计算机视觉、人工智能、自动控制等新技术的发展,智能农机被应用到农业生产的各个方面。综合分析我国名优茶智能化采摘关键技术研究方面的最新进展,重点从嫩芽图像分割技术研究、嫩芽识别及采摘点定位技术研究方面进行介绍,指出目前研究存在分割算法鲁棒性差、识别定位精度低、机艺不融合等问题,提出通过改进算法、技术创新、宜机改良等方法提高采摘精度,旨在为实现名优茶智能化采摘提供理论参考。
关键词:名优茶;智能采摘;图像分割;嫩芽识别;采摘点定位
中图分类号:S24; TP391.4
文献标识码:A
文章编号:2095-5553 (2024) 05-0202-09
收稿日期:2022年7月15日 修回日期:2022年9月28日*基金项目:四川省科学技术厅基本科研业务费项目(2021JBKY0014—01)
第一作者:张巍,女,1989年生,成都人,硕士,助理工程师;研究方向为农业机械与农业工程。E-mail: 1091844783@qq.com
通讯作者:赵帮泰,男,1981年生,四川泸县人,高级工程师;研究方向为农业机械化。E-mail: 870048173@qq.com
Research progress on key technology of intelligent picking of high-quality tea
Zhang Wei, Zhao Bangtai, Yang Changmin, Cheng Fangping, Wang Yipeng, Song Lejian
(Sichuan Academy of Agricultural Machinery Sciences, Chengdu, 610066, China)
Abstract:
At present, the tender bud picking of high-quality tea is still in the stage of manual picking. Labor shortage and lack of machinery have become the limiting factors for expanding production of high-quality tea. As a labor-intensive industry, tea production is in urgent need of standardization and mechanization. Whether it is bulk tea or famous tea, mechanization picking is needed to meet the growing production demand. With the development of computer vision, artificial intelligence, automatic control and other new technologies, intelligent agricultural machines have been applied to all aspects of agricultural production. This paper comprehensively analyzes the latest progress in research on key technologies for intelligent picking of high-quality tea in our country focuses on the introduction of tender buds image segmentation technology research, tender bud recognition and picking point location technology research, and points out that the current research has problems such as poor robustness of segmentation algorithms, low identification and positioning accuracy, and non-integration of agricultural machinery and agronomy. In order to improve the precision of picking, the methods such as improved algorithms, technological innovation, integration of agricultural machinery and agronomy are proposed. The aim is to provide a theoretical reference for the realization of intelligent picking of high-quality tea.
Keywords:
high-quality tea; intelligent picking; image segmentation; tender bud recognition; picking point localization
0 引言
茶業是我国传统优势产业,茶叶种植面积和产量均为世界首位[1]。2022年全国18个主要产茶省的茶园总面积达到3330.3khm2,同比增长2.03%,茶叶总产量达到3350kt,同比增产5.7%[2]。
随着经济的发展和人们生活水平的逐步提高,名优茶的需求日益增加,但发展规模和速度相较大宗茶依然缓慢,其主要原因:一是名优茶采摘季节性强且标准高、要求严,一般只采一芽二三叶处或顶芽,且要完整鲜嫩[3],需要采茶机具有较强的交互性和选择性,而现有的采茶机主要采取“一刀切”的采摘模式,采摘时将老叶嫩芽同一高度进行切割,破坏了芽叶的形状和质量,不适合于名优茶采摘。二是现阶段名优茶采摘主要依靠人工手采,劳动力投入高,采摘环节用工占整个茶叶生产用工的60%以上[4],随着农业劳动力结构的转变,用工量大、劳动强度高的名优茶采摘,用工荒的问题日渐严重。因此名优茶采摘对“机器换人”的需求越来越迫切。
茶叶生产作为劳动密集型产业急需标准化和机械化,无论是大宗茶还是名优茶,都需要实现机械化采摘才能满足日益增长的生产需求。本文结合国内外采茶机及名优茶智能化采摘关键技术研究进展,分析阐述嫩芽图像分割技术、识别以及采摘点定位技术等方面,指出当前研究中存在的问题和制约因素,提出发展建议及措施,展望名优茶智能化采摘机发展趋势。
1 国内外采茶机械研究现状
1.1 国外采茶机械研究现状
日本是采茶机械化研究较早的国家,自20世纪初采茶剪的出现开始,日本就开启了采茶机械的研究和应用,1960年,日本落合刃物株式会社研制出第一台机动式采茶机并在茶叶生产中應用,从此之后又先后出现了双人式采茶机、自走式采茶机和乘坐式采茶机,到1979年,机采茶的产量在日本全国茶叶总产量中的占比达到90%,机械化采茶得到基本普及。日本的采茶机种类繁多,从动力形式分类有电动式、手动式、机动式;从操作方式分类有单人手提式、双人抬式、自走式、乘坐式。日本对采茶机的工作原理及刀片切割方式进行了多种研究和试验,其中往复切割式的采茶效果最好,也是目前日本应用和出口采茶机采用最多的型式[5]。
苏联在1930年研制出一种三轮往复切割式采茶机,在1949年对折断式采摘原理展开研究,在1965年研制并投入使用一种折断和切割方式相结合的自走式采茶机。澳大利亚、英国、法国、印度等国家也相应地进行了采茶机的研究,从采摘原理来看,大多都为往复切割式采茶机[6]。
1.2 我国采茶机械研究现状
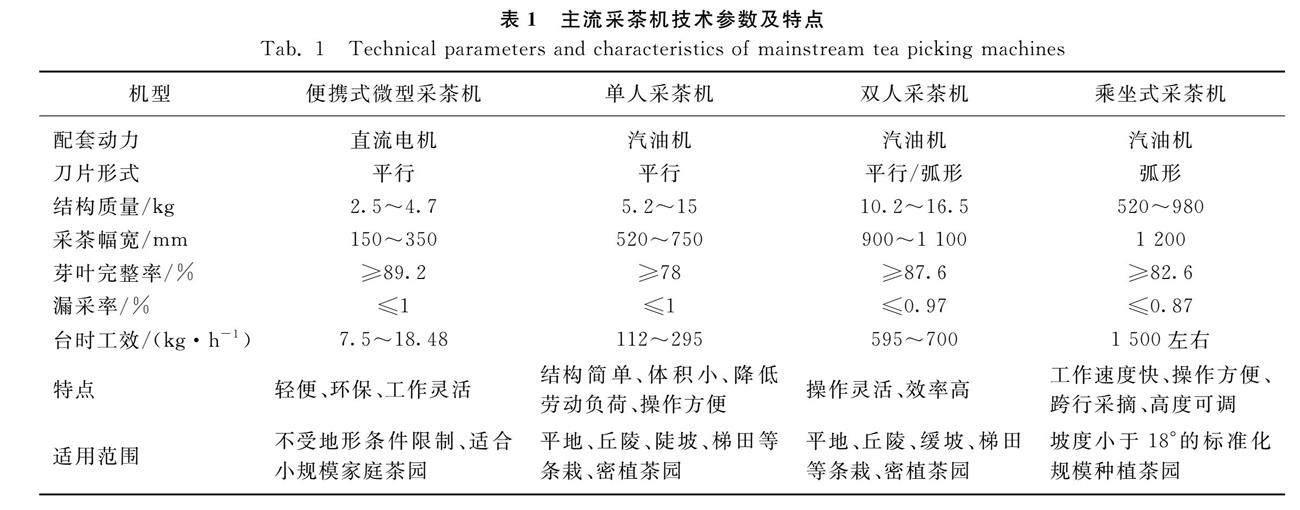
我国的采茶机研究起步也比较早,1947年,杭州农业改进所就开始研究茶叶采摘器,但因使用效率低而作罢。1955年正式开始研究采茶机,1959年被列入国家重点研究项目,之后在全国大范围地开展采茶机研究。我国首台被定型的采茶机是“手动南茶702型往复切割式采茶机”,首台通过鉴定的采茶机是中国农业科学院茶叶研究所研制的“电动往复切割式N1C型手提采茶机”,但因当时我国机械制造水平低,故而研制的采茶机未能在实际生产中推广使用[7]。直到20世纪70年代后期从日本引进技术,到20世纪90年代初与日本公司合资生产,再到近几年国内的农机生产企业、科研院所自主研发采茶机,相继提出了不同动力形式(手动式、电动式、机动式)、不同切割模式(螺旋滚刀式、水平勾刀式、往复切割式)的采茶机[8]。近年来,我国自主研制的采茶机已经在全国各地的茶区推广使用,主流采茶机大致分为便携式微型采茶机、单人采茶机、双人采茶机及乘坐式采茶机等[9],其技术参数及特点如表1所示。随着农业机械化的深入发展,全国各大茶区已逐渐普及大宗采茶机,机械化采茶成为茶叶生产的必然趋势[10]。
2 我国名优茶智能化采摘关键技术研究
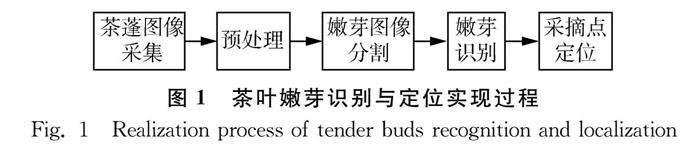
世界上有160多个国家和地区的人民有饮茶的习惯,饮茶风格迥异,各具特色,造就了对茶叶采摘标准的不同,大多只需采下芽叶即可,无需考虑完整性。目前对芽叶要求均匀、条索完整的名优茶只有我国生产,其主要市场在国内,所以名优茶采茶机械国外无从引进。近年来,国内的许多高校、科研院所、农机生产企业都围绕名优茶采茶机械进行了研究,随着计算机视觉技术及现代农业装备不断的深入研究,智能农机更多地应用于农业生产中,茶叶嫩芽智能化识别与定位是实现名优茶机械采摘的关键,实现过程如图1所示,其中嫩芽图像分割、嫩芽识别及采摘点定位是实现智能化采摘的核心技术,也是目前研究的重中之重[11]。
2.1 名优茶嫩芽图像分割算法的研究
图像分割(image segmentation)是图像识别和计算机视觉至关重要的预处理,为目标检测、识别定位提供先决条件[12]。实现名优茶智能化采摘的首要任务就是将嫩芽从老叶、枝条、土壤等复杂背景中识别出来,图像识别的质量取决于图像分割效果[13],因此研究适合茶叶嫩芽图像分割的算法至关重要。近年来,在嫩芽图像分割算法研究中,常用的嫩芽图像分割算法如图2所示。
2.1.1 嫩芽图像阈值分割算法研究
基于阈值的图像分割方法是通过获得的阈值将图像中的像素点划分为几个区域,使各区域内部具有一致属性,相邻区域之间不具有这种一致属性[14]。汪洋等[15]采集自然环境下茶叶嫩芽图像,特征分析选取R-B分量和饱和度S分量进行Otsu算法分割,R-B分量分割在鲁棒性和正确率上效果要优于S分量分割。周赞礼等[16]以自然环境下毛峰茶叶为研究对象,利用中值滤波、灰度拉伸获得G-B分量色差图对比度,采用基于迭代法的Otsu算法实现毛峰嫩芽图像的自动分割。姜苗苗等[17]通过魔鬼鱼觅食优化算法(MRFO)计算获得超绿色系数,增加嫩芽与背景的差异,对Otsu算法获得的阈值进行偏移校正,以此获得最佳阈值完成分割。
Otsu算法计算简单,通常不会受到对比度和光照强弱变化的干扰,被广泛地应用于图像分割中,但在求取最佳阈值时,需遍历灰度值范围内所有像素来计算方差。但该方法有非常高的环境和拍摄场景的要求,自然环境下的茶叶嫩芽细小密集且背景复杂,噪声较多,会使Otsu算法的计算量变得巨大以致分割效率降低,从而影响后续识别定位的精度,不适合用于茶叶嫩芽动态实时采摘。
2.1.2 嫩芽图像区域分割算法研究
基于区域的图像分割是以直接寻找区域为基础的分割技术,根据事先定义的一组准则把一幅图像分割为相似的多个区域[18]。邵明[19]首先采用分水岭算法对龙井茶叶图像初始分割,对过分割现象,提出区域合并算法,分析颜色、纹理特征定义相似度,升序排列得到合并顺序,满足合并准则的区域进行快速合并得到嫩芽分割图像。黄海军等[20]利用微分方程对图像去噪,提高图片质量,Otsu算法初始分割,再利用分水岭算法对图像进行二次分割。Zhang等[21]对茶叶图像经高斯平滑滤波,分段线性变换提高嫩芽与背景的差异,二值化图像后,Canny算子边缘检测,确定前景和背景,计算标记未知区域,最后利用分水岭完成分割,平均分割准确率达95.79%。分水岭算法分割原理清晰直观且速度快,但该方法对噪声干扰非常敏感,易产生严重过分割和无法找到有效边界,为获得精确连续的边界信息,需采取滤波去噪、标记提取或区域合并等方法有效克服过分割现象。
此外,方坤礼等[22]利用边缘检测方向算子的幅值B调节JSEG,形成一种新的彩色纹理分割图像的技术(JBSEG),将通过JBSEG分割后的图像再结合2R-G-B超绿特征,更好地分离出了茶叶嫩芽。JSEG法是一种同时兼顾颜色及纹理信息的分割方法,分割准确率高,算法鲁棒性强,但JSEG法易产生过分割,在茶叶嫩芽时,通常需要改进算法,提高像素颜色边界信息,减少过分割现象。
2.1.3 嫩芽图像聚类分割算法研究
基于聚类的图像分割方法是根据提取的特征矩阵的相似性将像素点聚集到一起,通过不断地迭代更新各个区域中的特征像素点直至收敛,最终达到图像分割的目的[23]。吴雪梅等[24]选取自然采集图像的Lab空间a、b分量分别进行Otsu阈值分割和K-means聚类分割,通过对比试验,Otsu阈值分割计算时间相对较短,但K-means聚类分割准确率比之较高,平均识别率达93%。张可等[25]采集黄山毛峰茶叶茶陇图像,选取图像RGB模型下R-B分量和Lab空间下b分量进行灰度直方图阈值分割,选取Lab空间下a、b分量进行K-means分割,通过对比研究表明,K-means分割效果更好。黄涛等[26]对采集自晴天和阴天条件下的茶叶图像,首先进行Tenen-grad梯度法选取清晰度区域,然后通过颜色模型分析,选取HSV模型进行K-means聚类分割,两种天气条件下分割准确率分别为72.48%和77.83%。K-means算法计算简单,容易实现,收敛速度快,但算法对噪声和离散点比较敏感,对自然环境下采集的嫩芽图片需进行去噪及去除离散点处理,再聚类,以此提高分割效果。
夏华鹍等[27]对茶叶图像多个颜色空间分量统计分析,提取嫩芽与背景差异较大的G-B、超红、Cg分量合成待分割图,采用SLIC超像素法获取超像素块,分别提取超像素块的横坐标、纵坐标、超红、Cg、G-B 分量的平均值作为分割特征进行分割,并与原始RGB图像进行“逻辑与”操作,得到嫩芽的彩色分割图像,平均分割率为75.6%。SLIC超像素法分割效率高,是目前较为出色的图像分割算法,算法在颜色和空间距离相似性上局部聚类,与K-means全局搜索相比,大大降低了计算复杂度,提高了分割速度,但是SLIC在处理大批量的图像时,速度和准确度上还不够理想,机采茶园面积普遍较大,适采期的嫩芽数量巨大且密集,若考虑应用到实际茶叶嫩芽采摘中,还需进一步解决实时性和准确率的问题。
2.1.4 基于图论的嫩芽图像分割算法研究
基于圖论的图像分割方法是将图像构建成带权无向图,把像素点作为节点,利用最小剪切准则得到图像的最佳分割[28]。毛腾跃等[29]提出一种基于显著性检测的Grab Cut茶叶嫩芽图像分割算法,将显著性目标预测模块设计成类似U-Net的编解码网络进行特征提取,得到茶叶嫩芽显著性图像,结合Grab Cut的掩码图像方式精确的分割出了嫩芽图像,这为智能化采茶提供了一种新的方法。Grab Cut法采用高斯混合模型(GMM)建立模型,只需通过少量的人机交互操作实现分割,在彩色图像分割中占有重要地位。但是名优茶智能化采摘需要全自动的实现方式,交互式分割显然不适合嫩芽采摘,需要对Grab Cut法进行非交互式改进,实现自动分割,才能应用于名优茶智能化采摘。
综合上述研究可以看出,研究学者们提出了多种多样的嫩芽图像分割算法,但大多数研究都是采集特定环境下或单一品种的茶叶图像进行室内研究,分割效果普遍较好,如果将其用于不同环境、不同品种的茶叶或现场采摘试验时,往往达不到精度和速度要求,不能满足实际实时采摘;又或者结合了多种算法进行多次分割以达到更好的分割效果,却又增加了算法的复杂度,降低了分割速度。故目前还没有任何一种分割算法适用于不同场景和不同品种的茶叶,嫩芽图像分割仍然是名优茶智能化采摘研究中非常重要的课题,还需进一步优化现有算法、探索融合新的分割技术,提高算法鲁棒性,为后续嫩芽的正确识别、精确定位奠定基础。
2.2 名优茶嫩芽识别定位技术的研究
名优茶嫩芽识别和采摘点定位是实现采摘机器人有选择性自主采摘的前提,嫩芽的识别包括了对嫩芽品级(单芽或一芽一二叶等)和芽叶成熟度的识别等,采摘点定位包括了采摘点平面二维坐标的确定和三维空间位置的求解[30]。
2.2.1 名优茶嫩芽识别技术研究
目标检测的核心是找出图像中的所有目标,并确定目标的大小及位置,因此其主要的两大任务就是图像识别和图像定位,其中图像识别又包含了目标类别的区分和形状大小的考虑。传统的目标检测方法需要人工进行选择设计特征,存在重复计算,耗时长等问题。而深度神经网络模型通过大量数据运算训练,提取特征的能力比人工选择强,训练后的模型泛化能力强,Ross等[31]提出R-CNN将卷积神经网络引入目标检测领域,大大提高了目标检测精度。
在实际的采摘过程中,需要根据茶叶的品级要求和制茶的需要采摘一芽一叶、一芽两叶或单芽,所以在分割出嫩芽的基础上,还要对茶叶嫩芽品级进一步的细分,表2为各研究学者对嫩芽品级识别算法的研究对比分析。
从表2可以看出,研究学者们主要采用了Faster R-CNN和YOLOv3识别嫩芽品级,在对单一品级(如一芽一叶,一芽两叶),单一背景(如睛天,阴天)分别分类识别时,两种算法都有较高的识别精度,但对于复杂环境、不同品种混合识别时,识别能力还不够,错误率较高。Faster R-CNN使用端到端的网络进行目标检测,实现目标定位与分类同步,采用RPN使网络直接产生候选区域,目标检测精度较高,但是Faster R-CNN计算量较大,不能实现实时检测,而YOLOv3采用回归思想,不用事先生成预选框,直接在目标图像上回归判定类别,计算简单,速度快,能够实现实时检测,更适合名优茶智能化采摘,但是由于没有了候选区域,使得YOLOv3不能非常精确定位目标,在检测精度上还需寻找进一步提高的方法。
除了品级的识别,合理的采摘时间也是提高茶叶品质的关键,嫩芽叶片的开放幅度关系到名优茶鲜叶的鲜嫩程度和成品茶的质量。针对嫩芽叶片全开状态、半开状态和未开状态,方梦瑞等[32]建立基于GoogLeNet的卷积神经网络识别模型,研究采集不同时期的叶片生长状态样本,制作成4种不同尺寸的样本库,试验结果显示,尺寸在256×256下平均识别率87.75%,效果最好,在该尺寸下,叶片未开状态识别率最高,达96%。吕军等[33]建立基于AlexNet的卷积神经网络识别模型,研究采集了不同年份、不同光照条件下、不同品种的嫩芽生长状态图像建立样本库,试验结果显示叶片全开状态识别率最高达98%。
以上两种网络模型都能实现嫩芽叶片生长状态的识别,但被误判的情况较多,主要原因有相机拍摄角度问题、自然环境影响、尺度改变的影响,仍需进一步结合新的图像处理技术提高样本质量,丰富不同拍摄角度样本数据库,采用多层分类训练,提高模型识别精度。
2.2.2 名优茶嫩芽采摘点定位技术研究
相对理想的采摘点选在嫩芽与茶梗连接处下方3mm左右较为合适[39],茶叶嫩芽采摘点的定位过程首先需要从分割处理后的茶叶嫩芽二维图像中寻找嫩芽区域的特征及采摘点二维坐标,再依据二维坐标信息求解其三维空间位置。质心法和最小外接矩形法是常用的目标定位算法,其在嫩芽采摘点二维坐标定位中的研究如表3所示。
质心定位算法中基本质心法计算简单,但是对嫩芽叶片对称性要求较高,由于拍摄角度问题导致图片中叶片对称性较差,定位出的质心大多落在叶片边缘,甚至是背景枝干上;加权质心法克服了对称性的问题,识别误差率较基本质心法有所降低,但处理速度没有基本质心法快,还需进一步改进算法提高算法精度及速度。最小外接矩形法用于描述目标轮廓,提取嫩芽外形轮廓或骨架的最小外接矩形,标记其中心点或嫩芽与其底部的交点作为采摘点信息,相比质心法,最小外接矩形法更能反映嫩芽茶梗所在,但其对于嫩芽外形轮廓要求相对理想,在俯视情况下则无法定位采摘点二维坐标,还需后续辅助工作来完成采摘任务。
由于茶叶嫩芽生长在不同高度,识别出采摘点二维信息还不能作为最终的采摘依据,只有准确判定出茶叶嫩芽的空间三维坐标才能实现最终的采摘。光学三维测量技术以其具有大量程、速度快、精度高、非接触等优点,广泛应用于机器人视觉系统当中,其测量方式有主动式和被动式两种,在采摘点三维坐标求解中的研究如表4所示。
从表4可以看出,双目立体视觉被广泛用于嫩芽采摘点三维坐标求解,双目立体视觉依靠左右位置相对固定的两个相机的视差来确定嫩芽的深度,在嫩芽纹理清晰的情况下,能很好地求解采摘点深度,但由于它不需要额外特定光源,易受环境光照影响,环境光过强或过弱都会使捕捉到的嫩芽图像叶片纹理清晰变低,从而导致图像匹配出现错误。光栅投影法是通过计算物体相位的变化值实现三维测量,一次投影就能实现整个茶蓬面的测量,与双目视觉相比,对环境要求低,受光照影响小,测量精度高且速度快,但是由于投影仪不能捕捉图像,无法明确投影仪的像素与世界坐标系间的关系,为此研究学者提出坐标映射标定法和坐标变化标定法,前者标定准确,但过程复杂,受到映射精度的限制,后者过程简单,但标定精度误差较大,所以仍需进一步优化光栅投影仪的标定方法。
3 存在问题
1) 嫩芽图像分割算法鲁棒性差。目前大多研究都是针对单一环境中的茶叶嫩芽,且分割算法常采用颜色或亮度作为分割特征,在自然环境下,茶叶嫩芽生长密集,颜色与老叶差别不大,并且容易受到光照不均匀、阴影的影响,这极大地增加了分割难度。也有少数研究针对自然环境下的茶叶嫩芽图像分割,但准确率并不高。
2) 嫩芽视觉识别定位技术有待进一步优化。自然环境中,茶叶叶片之间往往遮挡严重,且易随风晃动导致芽叶发生比例、变形、位置等变化,不同姿态的嫩芽采摘点也要分类讨论,这些都对识别和定位提出极大地挑战。而目前采用的识别定位方法对嫩芽自身形状要求过于理想化,具有一定局限性,自适应性不高,使得确定的采摘点落到叶片或者背景上,从而导致机械手损坏叶片或采摘落空。
3) 农机与农艺融合度不高。茶树的生长环境与姿态对机械化采摘影响较大,传统的茶园分散,地块普遍较小,且大多位于山地丘陵地带,不利于采茶机作业。加之种植模式不标准,茶行之间土地不平整,会使机械进入茶园产生巨大晃动,降低识别定位精度,不利于机械采摘。
4 发展建议
1) 融合新理论提高分割算法鲁棒性。对于自然环境中的茶叶嫩芽,结构复杂,需要更多地结合图像中除颜色、纹理、亮度等较低层次信息以外的高层内容,融合多种特征、创新新理论及新技术,如人工神经网络、遗传算法、小波变换等,极大地丰富图像分割算法,提高鲁棒性。
2) 深入研究快速动态识别方法,提高视觉识别定位精度。寻找能准确快速识别定位嫩芽采摘點三维数据的测量方法,结合优化算法,多次校准降低误差,引入新的目标检测方法,考虑芽尖大小、采摘时间、制作工艺、茶树品种等因素,更细致的进行种类划分,适应不同品种茶叶嫩芽的精确采摘,提高识别定位系统普适性和交互性。
3) 加强农机农艺融合。提高适宜机采的无性系茶叶良种培育,严格按照标准的机采茶园模式种植,加快茶园宜机化、集约化改造,土地平整方便采茶机通过。提升采摘机械硬件水平,行走机构运动平稳,可适应复杂地形,结构尺寸合理、通过性好,作业空间要覆盖整个茶蓬面,减少触碰茶树引起晃动,操作系统简单,便于广大茶农使用。
5 结语
智能化采摘是未来机采名优茶鲜叶的发展方向,将会有力地促进我国名优茶产业的发展。名优茶智能化采摘技术是一个多学科交叉融合的新兴研究方向,研究学者开展大量的研究及试验,也取得一定的成果,但是距离实际推广应用还有很大距离。随着计算机视觉技术、人工智能、机械制造技术的不断发展,茶园管理逐渐规范化、结构化,为实现名优茶智能化采摘提供良好条件。
参 考 文 献
[1] 李远华. 我国茶产业发展的思考[J]. 武夷学院学报, 2017(7): 27-32.
Li Yuanhua. Consideration for the development of tea industry [J]. Journal of Wuyi University, 2017(7): 27-32.
[2] 国家统计局. 中华人民共和国2022年国民经济和社会发展统计公报[EB/OL]. http://www.stats.gov.cn/sj/zxfb/202302/t20230228_1919011.html, 2023-02-28.
[3] 杨劲松. 名优茶鲜叶采摘技术[J]. 云南农业, 2021(9): 56-59.
[4] 李体喜. 名优茶采摘技术[J]. 农民致富之友, 2018, (21): 37.
[5] 王升. 便携式电动采茶机关键部件设计与试验研究[D]. 镇江: 江苏大学, 2018.
Sheng Wang. Research design and experimental study on portable electric tea plucking machine [D]. Zhenjiang: Jiangsu University, 2018.
[6] 韓余, 肖宏儒, 秦广明, 等. 国内外采茶机械发展状况研究[J]. 中国农机化学报, 2014, 35(2): 20-24.
Han Yu, Xiao Hongru, Qin Guangming, et al. Studies on develop situations of tea-leaf picker both at home and abroad [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 20-24.
[7] 权启爱. 采茶机械的研制和我国采茶机械化事业的发展[J].中国茶叶, 2018, 40(8): 14-17.
[8] 权启爱. 采茶机械的研制和我国采茶机械化事业的发展(续)[J]. 中国茶叶, 2018, 40(9): 8-12.
[9] 王文明, 肖宏儒, 宋志禹, 等. 茶叶生产全程机械化技术研究现状与展望[J]. 中国农机化学报, 2020, 41(5): 226-236.
Wang Weiming, Xiao Hongru, Song Zhiyu, et al. Research status and prospects of tea production mechanization technology [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(5): 226-236.
[10] 赵博杰. 基于机器视觉的茶叶嫩芽识别关键技术研究[D]. 鞍山: 辽宁科技大学, 2020.
Zhao Bojie. Tea bud segmentation and recognition based on machine vision [D]. Anshan: University of Science and Technology Liaoning, 2020.
[11] 易文裕, 程方平, 邱云桥, 等. 单人采茶机研究现状与发展趋势[J]. 中国农机化学报, 2020, 41(11): 33-38.
Yi Wenyu, Cheng Fangping, Qiu Yunqiao, et al. Research status and development trend of single tea-picking machine [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(11): 33-38.
[12] 张冬生. 基于阈值的图像分割算法研究[D]. 大庆: 东北石油大学, 2011.
Zhang Dongsheng. The study of image segmentation algorithm based on the threshold [D]. Daqing: Northeast Petroleum University, 2011.
[13] 黄旭, 张世义, 李军. 图像分割技术研究综述[J]. 装备机械, 2021, (2): 6-9.
[14] 刘硕. 阈值分割技术发展现状综述[J]. 科技创新与应用, 2020(24): 129-130.
[15] 汪洋, 胡靖, 邵煜坤, 等. 茶叶嫩芽图像自动分割方法的研究[J]. 黄山学院学报, 2015, 17(3): 14-16.
Wang Yang, Hu Jing, Shao Yukun, et al. A study on the methods of image segmentation for tea leaf sprouts [J]. Journal of Huangshan University, 2015, 17(3): 14-16.
[16] 周礼赞, 方梦瑞, 吕军. 低对比度茶叶嫩芽图像自动分割方法的研究[J]. 蚕桑茶叶通讯, 2019(2): 22-25.
[17] 姜苗苗, 问美倩, 杨芷羽, 等. 基于MRFO的茶叶嫩芽图像分割方法[J]. 农业装备与车辆工程, 2021, 59(5): 29-32.
Jiang Miaomiao, Wen Meiqian, Yang Zhiyu, et al. Tea sprout image segmentation method based on MRFO [J]. Agricultural Equipment & Vehicle Engineering, 2021, 59(5): 29-32.
[18] 侯红英, 高甜, 李桃. 图像分割方法综述[J]. 电脑知识与技术, 2019, 15(5): 176-177.
[19] 邵明. 基于计算机视觉的龙井茶叶嫩芽识别方法研究[D]. 杭州: 中国计量学院, 2013.
Shao Ming. Research on computer vision based recognition methods of Longjing tea sprouts [D]. Hangzhou: China Jiliang University, 2013.
[20] 黄海军, 吴明晖, 王先伟, 等. 基于改进分水岭算法的茶叶嫩叶图像识别[J]. 贵州农业科学, 2018, 46(4): 136-138.
Huang Haijun, Wu Minghui, Wang Xianwei, et al. Image recognition of tender leaves based on improved watershed algorithm in tea [J]. Guizhou Agricultural Sciences, 2018, 46(4): 136-138.
[21] Zhang L, Zou L, Wu C Y, et al. Method of famous tea sprout identification and segmentation based on improved watershed algorithm [J]. Computers and Electronics in Agriculture, 2021, 184: 106-108.
[22] 方坤禮, 廖建平, 刘晓辉. 基于改进JSEG技术的茶叶图像嫩芽分割与识别研究[J]. 食品工业, 2017, 38(4): 134-138.
Fang Kun-li, Liao Jian-ping, Liu Xiao-hui. Research on tea leaf of image segmentation and recognition using improved JSEG algorithm [J]. The Food Industry, 2017, 38(4): 134-138.
[23] 郑晓霞, 曹建芳, 赵青杉. 聚类算法在图像分割中的应用[J]. 忻州师范学院学报, 2021, 37(2): 24-27.
Zheng Xiaoxia, Cao Jianfang, Zhao Qingshan. Application of clustering algorithm in image segmentation [J]. Journal of Xinzhou Teachers University, 2021, 37(2): 24-27.
[24] 吴雪梅, 唐仙, 张富贵, 等. 基于K-means聚类法的茶叶嫩芽识别研究[J]. 中国农机化学报, 2015, 36(5): 161-164, 179.
Wu Xuemei, Tang Xian, Zhang Fugui, et al. Tea buds image identification based on lab color model and K-means clustering [J]. Journal of Chinese Agricultural Mechanization, 2015, 36(5): 161-164, 179.
[25] 张可, 吕军. 自然条件下茶叶嫩芽图像分割方法的研究[J]. 黑龙江八一农垦大学学报, 2016, 28(2): 100-104.
Zhang Ke, Lü Jun. Study on automatic segmentation of tea sprouts under natural conditions [J]. Journal of Heilongjiang Bayi Agricultural University, 2016, 28(2): 100-104.
[26] 黄涛, 方梦瑞, 夏华鵾, 等. 基于清晰度的茶叶嫩芽聚类分割方法[J]. 湖北农业科学, 2020, 59(8): 154-157.
Huang Tao, Fang Mengrui, Xia Huakun, et al. Method of clustering segmentation for tea sprouts based on sharpness function [J]. Hubei Agricultural Sciences, 2020, 59(8): 154-157.
[27] 夏华鹍, 方梦瑞, 黄涛, 等. 基于SLIC超像素的茶叶嫩芽图像分割方法研究[J]. 西昌学院学报(自然科学版), 2019, 33(4): 75-77, 124.
Xia Huakun, Fang Mengrui, Huang Tao, et al. Study on the method of image segmentation of tea sprouts based on SLIC super-pixel [J]. Journal of Xichang University(Natural Science Edition), 2019, 33(4): 75-77, 124.
[28] 侯葉. 基于图论的图像分割技术研究[D]. 西安: 西安电子科技大学, 2011.
Hou Ye. Research on graph theory based image segmentation [D]. Xian: Xidian University, 2011.
[29] 毛腾跃, 张雯娟, 帖军. 基于显著性检测和Grabcut算法的茶叶嫩芽图像分割[J]. 中南民族大学学报(自然科学版), 2021, 40(1): 80-88.
Mao Tengyue, Zhang Wenjuan, Tie Jun. Image segmentation of tea buds based on salient object detection and Grabcut [J]. Journal of South-Central University for Nationalities(Natural Science Edition), 2021, 40(1): 80-88.
[30] 王文明, 肖宏儒, 陈巧敏, 等.基于图像处理的茶叶智能识别与检测技术研究进展分析[J]. 中国农机化学报, 2020, 41(7): 178-184.
Wang Weiming, Xiao Hongru, Chen Qiaoming, et al. Research progress analysis of tea intelligent recognition and detection technology based on image processing [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(7): 178-184.
[31] Ross B Girshick, Jeff Donahue, Trevor Darrell, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2014: 580-587.
[32] 方梦瑞, 夏华鵾, 周礼赞, 等. 基于GoogLeNet的茶叶嫩芽生长状态智能识别[J]. 黄山学院学报, 2019, 21(5): 17-21.
Fang Mengrui, Xia Huakun, Zhou Lizan, et al. Intelligent identification of tea buds growth state based on GoogLeNet [J]. Journal of Huangshan University, 2019, 21(5): 17-21.
[33] 吕军, 夏华鹍, 方梦瑞, 等. 基于AlexNet的茶叶嫩芽状态智能识别研究[J]. 黑龙江八一农垦大学学报, 2019, 31(2): 72-78.
Lü Jun, Xia Huakun, Fang Mengrui, et al. Research on intelligent identification of tea sprouts state based on AlexNet [J]. Journal of Heilongjiang Bayi Agricultural University, 2019, 31(2): 72-78.
[34] 许高建, 张蕴, 赖小燚. 基于Faster R-CNN深度网络的茶叶嫩芽图像识别方法[J]. 光电子·激光, 2020, 31(11): 1131-1139.
Xu Gaojian, Zhang Yun, Lai Xiaoyi. Recognition approaches of tea bud image based on faster R-CNN depth network [J]. Journal of Optoelectronics Laser, 2020, 31(11): 1131-1139.
[35] 罗浩伦, 冯泽霖, 冉钟南, 等. 基于VGG16网络的茶叶嫩芽自动检测研究[J]. 农业与技术, 2020, 40(1): 15-17.
[36] 朱红春, 李旭, 孟炀, 等. 基于Faster R-CNN网络的茶叶嫩芽检测[J]. 农业机械学报, 2022, 53(5): 217-224.
Zhu Hongchun, Li Xu, Meng Yang, et al. Tea bud detection based on Faster R-CNN network [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(5): 217-224.
[37] 施莹莹, 李祥瑞, 孙凡. 基于YOLOv3的自然环境下茶叶嫩芽目标检测方法研究[J]. 电脑知识与技术, 2021, 17(3): 14-16.
[38] Yang H L, Chen L, Chen M T, et al. Tender tea shoots recognition and positioning for picking robot using improved YOLO-V3 model [J]. IEEE Access, 2019, 7.
[39] 白雪. 基于计算机视觉的名优茶嫩芽识别与定位[J]. 数码世界, 2020(2): 42.
[40] 孙晓锋. 名优茶智能化采摘中新梢识别及其中心点确定的方法研究[D]. 南京: 南京林业大学, 2014.
Sun Xiaofeng. Researches on high-quality tea flush identification and centering method for intelligent plucking [D]. Nanjing: Nanjing Forestry University, 2014.
[41] 邵佩迪. 基于機器视觉的茶叶嫩芽识别关键算法研究[D]. 上海: 上海工程技术大学, 2020.
Shao Peidi. Research on key algorithms of tea bud recognition based on machine vision [D]. Shanghai: Shanghai University of Engineering Science, 2020.
[42] 裴伟, 王晓林. 基于图像信息的茶叶二维采摘坐标的提取[J]. 浙江农业学报, 2016, 28(3): 522-527.
Pei Wei, Wang Xiaolin. The two-dimension coordinates extraction of tea shoots picking based on image information [J]. Acta Agriculturae Zhejiangensis, 2016, 28(3): 522-527.
[43] 姜宏涛, 何博侠, 章亚非. 采茶机械手嫩芽识别与定位方法研究[J]. 机械与电子, 2021, 39(7): 60-64, 69.
Jiang Hongtao, He Boxia, Zhang Yafei. Research on the method of recognizing and positioning the shoots of the picking manipulator [J]. Machinery & Electronics, 2021, 39(7): 60-64, 69.
[44] 龙樟, 姜倩, 王健, 等. 茶叶嫩芽视觉识别与采摘点定位方法研究[J]. 传感器与微系统, 2022, 41(2): 39-41, 45.
Long Zhang, Jiang Qian, Wang Jian, et al. Research on method of tea flushes vision recognition and picking point localization [J]. Transducer and Microsystem Technologies, 2022, 41(2): 39-41, 45.
[45] 邵佩迪, 吴明晖. 基于视觉测量的茶叶嫩芽定位方法研究[J]. 农业装备与车辆工程, 2020, 58(9): 50-53.
Shao Peidi, Wu Minghui. Tea bud positioning method based on visual measurement [J]. Agricultural Equipment & Vehicle Engineering, 2020, 58(9): 50-53.
[46] 陈妙婷. 基于计算机视觉的名优茶嫩芽识别与定位[D]. 青岛: 青岛科技大学, 2019.
Chen Miaoting. Recognition and location of high-quality tea buds based on computer vision [D]. Qingdao: Qingdao University of Science and Technology, 2019.
[47] 邹浪. 基于视觉的名优绿茶识别及采摘路径规划[D]. 杭州: 浙江理工大学, 2021.
Zou Lang. Identification and picking path planning of famous green tea based on vision [D]. Hangzhou: Zhejiang Sci-Tech University, 2021.
[48] 张浩, 陈勇, 汪巍, 等. 基于主动计算机视觉的茶叶采摘定位技术[J]. 农业机械学报, 2014, 45(9): 61-65, 78.
Zhang Hao, Chen Yong, Wang Wei, et al. Positioning method for tea picking using active computer vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9): 61-65, 78.