基于MLS LiDAR点云提取桃树结构参数
2024-05-30钟丹陈鸿文王思邱霞蒲长兵李宗南
钟丹 陈鸿文 王思 邱霞 蒲长兵 李宗南

摘要:為构建数字化果园并提高智能化管理水平,探索基于MLS LiDAR提取桃树结构参数的方法。使用背包搭载多平台激光雷达采集展叶期桃园点云数据,采用改进K-Means聚类算法分割单棵桃树点云;对部分存在空洞的枝条点云上采样,得到较高密度枝条点云数据;使用不同直径的圆柱拟合重建桃树定量结构模型(QSM),提取桃树5项结构参数。结果表明:该方法能实现桃树精准三维模型重建,重建后提取的冠幅值、株高、主干直径、一二级枝条长度与实测值决定系数分别为0.779、0.939、0.978、0.965、0.986,均方根误差分别为0.280 m、0.076 m、0.003 m、0.066 m、0.068 m;平均相对误差为8.6%、2.5%、3.2%、2.6%、8.4%。研究结果可为桃园智能化管理提供数据支撑。
关键词:LiDAR点云;桃树;结构参数;定量模型;桃树分割
中图分类号:S662.1; TP391.4
文献标识码:A
文章编号:2095-5553 (2024) 05-0182-06
收稿日期:2022年5月26日 修回日期:2022年7月4日*基金项目:国家重点研发计划(2021YFD1600800);四川省科技计划项目(2023JDRC0046);四川省财政自主创新专项(2022ZZCX032);四川省农业科学院揭榜挂帅项目(1+9KJGG008)
第一作者:钟丹,女,1990年生,四川遂宁人,硕士,工程师;研究方向为数字农业。E-mail: 838092218@qq.com
通讯作者:王思,男,1985年生,四川平昌人,硕士,副研究员;研究方向为数字农业。E-mail: frankly@163.com
Extracting peach tree structural parameters based on MLS LiDAR point cloud
Zhong Dan, Chen Hongwen, Wang Si, Qiu Xia, Pu Changbing, Li Zongnan
(Institute of Remote Sensing and Digital Agriculture, Sichuan Academy of Agricultural Sciences,
Chengdu Agricultural Remote Sensing Center, Chengdu, 610066, China)
Abstract:
In order to build digital orchards and improve the level of intelligent management, this study extracted peach tree structural parameters based on MLS LiDAR point cloud. Firstly, a backpack equipped multi-platform LiDAR was used to collect the point cloud data of peach orchard during leaf development, and an improved K-Means clustering algorithm was used to segment a single peach tree point cloud. Then, some branches with holes were sampled to obtain high density point cloud data of peach branches. Finally, the quantitative structure model (QSM) of peach tree was reconstructed by using cylinder fitting with different diameters, and five structural parameters of peach tree were extracted. The results showed that this method could achieve accurate 3D model reconstruction of peach trees. The determination coefficients of crown width, plant height, trunk diameter, length of primary and secondary branches and measured values extracted by point cloud 3D reconstruction were 0.779, 0.939, 0.978, 0.965, 0.986, respectively, the root mean square errors were 0.280 m, 0.076 m, 0.003 m, 0.066 m, 0.068 m, respectively, and the average relative error was 8.6%, 2.5%, 3.2%, 2.6%, 8.4%, respectively. The research results can provide data support for the intelligent management of peach orchard.
Keywords:
LiDAR point cloud; peach tree; structural parameters; quantitative model; peach tree segmentation
0 引言
果树冠层结构信息是表征树干、枝条、叶片等器官特征、数量及空间分布的数据,是估算果树光合效率、蒸腾、生产潜力的基础,对果园精准灌溉、病害防治及提高产量与品质有重要作用[1-3]。因而建设智慧果园实现标准化智能化管理有赖于快速准确获得果树结构信息。果树结构信息获取方式主要分为三类:(1)人工测量方法,直接使用尺子测量株高和树冠直径[4-6]该方法需要投入大量劳动力、效率低且具有破坏性等缺点。(2)基于图像的方法,图像数据获取简单、快速且成本低,因此成为获取果树信息的常用方法。目前主要通过图像提取冠幅[7, 8]、株高值[7]、预估果实大小[9]和产量[10-12],或者通过深度相机获取深度图像提取果树三维信息[13, 14]的方式对果树长势进行监测。该图像法对不带叶的主枝树冠测量效果较好,但较难获得常绿或者复杂分枝果树的内部枝干结构,并且图像的获取对光环境鲁棒性较差。(3)基于激光雷达扫描的方法,通过激光雷达扫描能够发射穿透植被冠层的激光束并生成树木点云,获取树木三维结构信息,一定程度上取代了人工作业,弥补了光学图像易出现遮挡的不足[15],在树木结构参数提取方面拥有广阔的应用前景。目前,基于LiDAR点云提取树木结构信息的研究,主要集中在林木的单木分割[16-18]和枝叶重建[19-22],以及树高[23]、冠层[24]、叶面积指数[25]等参数估计。对于果树结构参数提取的研究相对较少,主要基于点云特征检测树干[26, 27]、点云重建提取枝条信息[28]和冠层体积[29]等。果树枝干数量和长度是果树生长和产量的重要指标,枝干三维重建对于研究冠层光照分布、提取结构参数以及果园精准管理等都具有重要的作用。目前,果树点云重建提取的枝干信息精度较低。
移动激光扫描(MLS)利用车载、背包、手持等不同地面移动平台通过多角度数据拼接可在短时间内实现大范围的地面数据采集,可以根据不同通行环境选择不同的搭载平台,在果树结构参数提取方面有着巨大潜力。与地面激光扫描(TLS)相比,MLS点云密度较低[30]且有较多噪声,对获取果树精细结构参数有较大挑战。Zhang等[28]利用MLS点云提取枝条长度和数量,除了一级枝条精度能达到92%和88%外,其他级枝条提取精度均较低。针对MLS LiDAR点云数据密度较低,可能出现空洞的问题,本文使用MLS LiDAR采集桃树点云数据,探索低密度点云数据重建桃树三维定量模型的方法,并检验所提取的冠幅值、株高、树干直径和枝条长度值等结构参数的精度,为MLS LiDAR技术快速构建数字化果园提供参考。
1 数据与方法
1.1 研究区概况
研究区位于四川省成都市龙泉驿区的桃新品种新技术核心示范区(30°31′27.1″N,104°16′53.5″E),桃是当地的特色水果之一,种植面积达6 000 hm2以上,年产量达110 kt以上,是当地重要的经济作物。园区内桃树标准化成行栽种,行距3.5 m,株距2.5 m,有Y字形和开心型两种树形,树龄为3年,矮化后平均株高2.5 m。在园区选择3行,每行10株,共计30株桃树建立样方,对每株桃树编号,并按图1所示“S”形规划路线在3月2日桃树刚长出新叶时采集数据。
1.2 数据获取
1.2.1 LiDAR点云数据
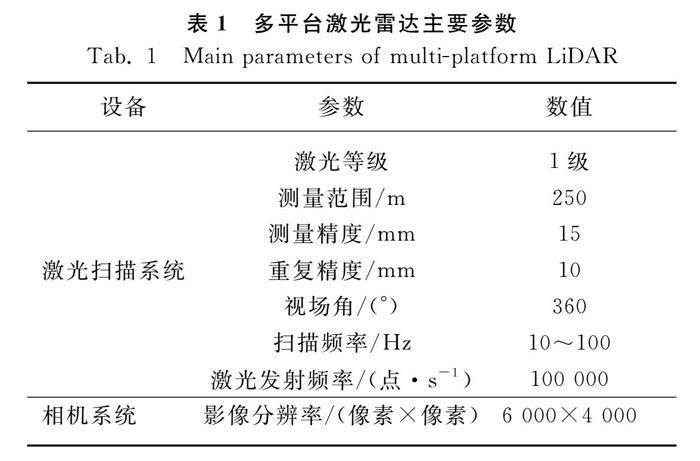
LiDAR点云数据通过背包搭载AS-300HL多平台激光雷达测量系统采集,该仪器拥有较高的扫描速度及测量级精度,能快速、非接触地提供目标场景的三维点云,技术参数见表1。外业数据采集完成后,通过CGO(CHC Geomatics Office 2)转换基站格式,然后使用Waypoint Inertial Explorer (GPS-IMU)后处理软件先完成基站和移动站的GNSS解算再结合GNSS/INS组合解算获得精准的轨迹数据,最后通过华测导航研发的CoPre点云预处理软件完成点云解算,得到las格式的点云数据。
1.2.2 实测数据
使用直尺、软尺等工具测量样方区内30棵桃树冠幅值、株高、树干直径及部分枝条长度。通过测量单棵桃树冠层南北、东西方向长度,取其平均值为冠幅值。由于研究区桃树已经矮化,树干大多高0.5 m左右,所以选择高于地面0.3 m位置处测量树干直径。根据桃树枝条分级原则,首先确定桃树主干,从主干上生长伸长的枝条为一级枝条,再确定一级枝条主茎,认为从一级枝条上生长伸长的枝条为二级枝条,以此类推确定其余次级枝条。在样方区随机选取一级和二级枝条各10枝分别测量长度。
1.3 点云数据预处理
数据预处理包括点云去噪和分离地面点云与非地面點云。点云去噪主要是剔除两类噪声,一类是与研究目标无关的点云,如样方区的电线杆、气象站、样方外的其他树木和杂草等;二类是由于测量过程中不可避免的误差导致的噪声点云。对于第一类噪声,采用Cloud Compare软件裁剪剔除;对于第二类噪声,采用统计分析法去除,设置邻域点个数为10,标准差阈值为2。分离地面点云与非地面点云时采用Zhang等[31]提出的CFS(Cloth Simulation Filter)滤波方法。根据采集的点云密度,通过多次试验证明滤波时设置点云分辨率0.5 m、迭代处理500次、地面点和非地面点阈值为0.2 m时效果最佳。虽然CFS算法滤波效果好,但是依然存在少数临近地面的树干部分点云被误分割为地面点云。
1.4 桃树结构参数提取
基于LiDAR点云提取桃树结构参数,为降低地形起伏的影响需对桃树点云归一化,预处理后桃树点云高程与地面点云高程相减完成。然后对归一化后点云进行单棵桃树分割,再通过三维重建桃树定量模型提取单棵桃树冠幅值、株高、树干直径、枝条长度等结构参数。
1.4.1 单树分割
单棵桃树分割主要有冠层高度模型(Canopy Height Model,CHM)分割和点云聚类分割两类方法,CHM更多是对上部结构的描述,缺乏树木下部结构信息且CHM表面平滑度难以控制,更多研究倾向于通过点云聚类直接分割。本文采用改进K-Means聚类算法[32],在单木树干处的重心位置寻找初始聚类中心对样方区桃树进行单棵分割,分割效果较好。相邻树间出现枝叶重叠时,树冠层部分易发生误分割。
1.4.2 单树三维建模
离散点云无连续表面,无法直接估算实体结构参数,通过对桃树点云表面重建得到三维模型提取结构参数。为避免树叶遮挡影响树木内部枝条信息,首先进行枝叶点云分离,然后对枝条点云上采样后进行三维重建。
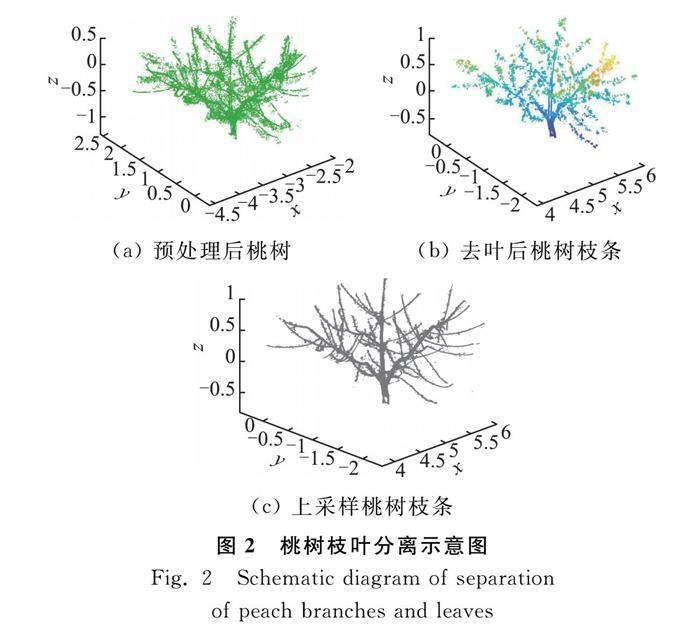
根据桃树点云分布可知,枝干部位点云大致呈圆柱状态,叶子部分点云成离散状态,按照Hackenberg等[33]提出的方法利用Matlab程序实现桃树枝干与树叶分离,然后手动剔除误判点云,再根据Alexa等[34]方法对枝干点云上采样。桃树枝叶分离示意如图2所示。具体步骤如下。
1) 使用KD-Tree鄰近搜索点集,计算协方差特征值(λ1,λ2,λ3)。
2) 将特征值按照λ1≥λ2≥λ3排序,设置λ2,λ3在空间变化中的占比阈值提取树干点云。
3) 通过水平方向的法向量约束,对树干点云与非树干点云进行初判断。
4) 对初判为树干的点云欧式聚类再进行圆柱拟合,剔除树叶点云得到主干和一级枝条点云较准确,但隶属于二级枝条的部分点云被误判为叶子点云删除,部分叶片点云又被误判为枝条点云,如图2(b)所示。
5) 为了不影响枝条三维重建结果,手动剔除未分离的叶片点云。
6) 通过Alexa等采用的移动最小二乘差值法对枝条点云进行上采样补充。
7) 手动裁剪原始枝条点云补充在上采样后依然出现空洞的枝条位置处,获得更准确的枝条点云,如图2(c)所示。
得到精确枝条点云后,使用QSMTree模型[35]以圆柱拟合的方法重建桃树定量模型,具体步骤如下。
1) 以树干为基部从下而上找到所有点作为一级枝条基部,以泰森多边形聚类法聚类一级枝条点云。
2) 以一级枝条为基部找到二级枝条分叉点,依次分割多级枝条点云。
3) 分别以不同半径圆柱体拟合分割出的不同等级枝条点云,建立三维模型。
1.4.3 结构参数提取
桃树定量模型重建完成后通过QSM中的计算程序,在Matlab中计算出桃树冠幅值、株高、树干直径和枝条长度等结构参数。
1.5 精度评价
基于点云提取的桃树结构参数与实测值对比分析以验证基于点云提取桃树结构参数的精度。试验结果以1∶1散点图表示,并以均方根误差RMSE、平均相对误差MRE和决定系数R2作为评价指标。RMSE表示提取值与实测值之间的偏差,MRE和R2直观表示两者偏差程度,MRE越小,R2越接近于1,相关性越好。
2 结果与分析
2.1 三维重建结果与分析
通过QSMTree模型对上采样后桃树枝条点云分割,以不同颜色表示隶属于不同等级枝条的点云,如图3(a)所示,根据分割的枝条点云重建枝条,以不同颜色表示不同等级枝条,如图3(b)所示。
从图3可以看出,枝条重建结果与枝条分级结果吻合,枝条重建精度主要由枝条点云分级准确性决定。从图3(a)可以看出,二、三级枝条点云分级准确,但是存在部分一级枝条点云误分为主干点云现象。主要因为对主干点云分类应该从下至上遍历点云搜索分叉点,将检索到第一个分叉点前遍历的点云聚类为主干点云,模型在对主干点云分类时,将检索到最后一个分叉点前遍历的点云聚类为主干导致分割不够准确。
2.2 结构参数提取结果与分析
从图4可知,基于点云提取的株高、主干直径、一二级枝条长度与实测值的相关性很好,RMSE分别为0.076 m、0.003 m、0.066 m、0.068 m;MRE为2.5%、3.2%、2.6%、8.4%。基于点云提取的冠幅值与实测值的相关性较好,RMSE为0.280 m,MRE为8.6%。
桃树结构参数提取精度主要受桃树单木分割和三维重建精度的影响。单棵桃树点云分割时枝叶点云过分割和欠分割会导致枝条点云减小,影响冠幅值和枝条长度提取精度;杂草等低矮植物点云误判为地面点云或主干点云会影响株高和主干直径提取精度。三维重建时枝叶分离的精确度和点云分级精度均会影响重建模型中枝条长度、大小等。
另一方面,桃树普遍高于测量人员身高,用直尺测量株高时人仰视树顶估读导致实测值与实际值存在偏差,也会对点云提取结构参数的精度评定造成影响。
3 结论
1) 基于MLS LiDAR点云能够建立桃树定量三维模型,提取的株高、主干直径、一二级枝条长度与实测值的相关性较好,RMSE分别为0.076 m、0.003 m、0.065 m、0.053 m;基于点云提取的冠幅值与实测值的相关性一般,RMSE为0.280 m。结果表明,基于LiDAR点云能准确地提取桃树结构参数,为桃园智能化管理提供数据支撑。
2) 基于MLS LiDAR点云提取桃树结构参数,对于实现果园的数字化管理具有重要的应用价值,但仍存在一些问题有待后续研究改进:(1)开心型桃树分枝间距大于株距和部分树冠重叠现象影响单棵桃树分割精度,需进一步研究提高矮化桃树单棵分割精度的算法;(2)枝叶分离时采用手动剔除树叶和添加枝条点云的方式以获得完整枝条点云,下一步需研究更准确地快速分离枝叶算法;(3)三维模型重建时将部分一级枝条误认为主干,需完善适用于不同树形的重建程序;(4)单次输入只能对一棵桃树建模提取结构参数,需进一步完善程序,实现果园内大量果树自动快速建模并提取结构参数。
参 考 文 献
[1] 盛统民, 马英杰. 水氮耦合桶栽枣树冠层光分布与叶面积指数关系[J]. 北方园艺, 2019(12): 20-26.
Sheng Tongmin, Ma Yingjie. Relationship of water-nitrogen coupling between canopy light distribution and leaf area index on jujube in pot [J]. Northern Horticulture, 2019(12): 20-26.
[2] 白崗栓, 杜社妮, 王建平. 陕北山地苹果树形改造研究[J]. 中国农业大学学报, 2021, 26(12): 54-66.
Bai Gangshuan, Du Sheni, Wang Jianping. Study on the canopy transformation of mountain apple in northern Shanxi [J]. Journal of China Agricultural University, 2021, 26(12): 54-66.
[3] 吴升, 温维亮, 王传宇, 等. 数字果树及其技术体系研究进展[J]. 农业工程学报, 2021, 37(9): 350-360.
Wu Sheng, Wen Weiliang, Wang Chuanyu, et al. Research progress of digital fruit trees and its technology system [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 350-360.
[4] Morgan K T, Scholberg J, Obreza T A, et al. Size, biomass, and nitrogen relationships with sweet orange tree growth [J]. Journal of the American Society for Horticultural Science, 2006, 131(1): 149-156.
[5] 雒宏佳, 李建红, 赵生春, 等. 甘肃省核桃坚果表型特征及多样性研究[J]. 中国果树, 2019(5): 87-92.
Luo Hongjia, Li Jianhong, Zhao Shengchun, et al. Phenotypic characteristics and diversity of walnut nuts in Gansu Province [J]. China Fruits, 2019(5): 87-92.
[6] 严毅, 王有兵, 张夸云, 等. 海口林场53年生油橄榄结果树表型性状的多样性分析[J]. 西部林业科学, 2016, 45(6): 99-103.
Yan Yi, Wang Youbing, Zhang Kuayun, et al. Diversity analysis on phenotypic traits of 53-year-old Olea europaea L. [J]. Journal of West China Forestry Science, 2016, 45(6): 99-103.
[7] 束美艳, 李世林, 魏家玺, 等. 基于无人机平台的柑橘树冠信息提取[J]. 农业工程学报, 2021, 37(1): 68-76.
Shu Meiyan, Li Shilin, Wei Jiaxi, et al. Extraction of citrus crown parameters using UAV platform [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(1): 68-76.
[8] 张先洁, 孙国祥, 汪小旵, 等. 基于超像素特征向量的果树冠层分割方法[J]. 江苏农业学报, 2021, 37(3): 724-730.
Zhang Xianjie, Sun Guoxiang, Wang Xiaochan, et al. Segmentation method of fruit tree canopy based on super pixel feature vector [J]. Jiangsu Journal of Agricultural Sciences, 2021, 37(3): 724-730.
[9] 李文勇, 陈梅香, 许树坡, 等. 基于分水岭和凸包理论的自然场景下未成熟苹果直径测量方法[J]. 农业工程学报, 2014, 30(23): 207-214.
Li Wenyong, Chen Meixiang, Xu Shupo, et al. Diameter measurement method for immature apple based on watershed and convex hull theory [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(23): 207-214.
[10] 程洪, Lutz Damerow, Michael Blanke, 等. 基于图像处理与支持向量机的树上苹果早期估产研究[J]. 农业机械报, 2015, 46(3): 9-14, 22.
Cheng Hong, Lutz Damerow, Michael Blanke, et al. Early yield estimation of‘Gala apple trees using image processing combined with support vector machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 9-14, 22.
[11] 刘玉婵, 胡阳. 基于普通数码影像的单株桃树估产方法[J]. 南方农业学报, 2018, 49(3): 606-611.
Liu Yuchan, Hu Yang. Yield estimation method for peach yield per plant based on ordinary digital image [J]. Journal of Southern Agriculture, 2018, 49(3): 606-611.
[12] 郭斌, 吴亚颜, 周嘉耀, 等. 基于无人机影像数据的苹果产量模拟——以洛川县为例[J]. 西安科技大学学报, 2017, 37(3): 450-454.
Guo Bin,Wu Yayan, Zhou Jiayao, et al. Simulation of the apple yield based on unmanned aerial vehicle image data: Taking Luochuan county as an example [J]. Journal of Xian University of Science and Technology, 2017, 37(3): 450-454.
[13] 熊龙烨, 王卓, 何宇, 等. 果树重建与果实识别方法在采摘场景中的应用[J]. 传感器与微系统, 2019, 38(8): 153-156.
Xiong Longye, Wang Zhuo, He Yu, et al. Application of fruit tree reconstruction and fruit recognition methods in picking scenes [J]. Transducer and Microsystem Technologies, 2019, 38(8): 153-156.
[14] Dong W, Roy P, Isler V. Semantic mapping for orchard environments by merging two-sides reconstructions of tree rows [J]. Journal of Field Robotics, 2019, 37(1): 97-121.
[15] Berk P, Hocevar M, Stajnko D, et al. Development of alternative plant protection product application techniques in orchards, based on measurement sensing systems: A review [J]. Computers and Electronics in Agriculture, 2016, 124: 273-288.
[16] 王鑫運, 黄杨, 邢艳秋, 等. 基于无人机高密度LiDAR点云的人工针叶林单木分割算法[J]. 中南林业科技大学学报, 2022, 42(8): 66-77.
Wang Xinyun, Huang Yang, Xing Yanqiu, et al. The single tree segmentation of UAV high-density LiDAR point cloud data based on coniferous plantations [J]. Journal of Central South University of Forestry & Technology, 2022, 42(8): 66-77.
[17] 王濮, 邢艳秋, 王成, 等. 一种基于图割的机载LiDAR单木识别方法[J]. 中国科学院大学学报, 2019, 36(3): 385-391.
Wang Pu, Xing Yanqiu, Wang Cheng, et al. A graph cut-based approach for individual tree detection using airborne LiDAR data [J]. Journal of University of Chinese Academy of Sciences, 2019, 36(3): 385-391.
[18] Liu L, Lim S, Shen X, et al. A hybrid method for segmenting individual trees from airborne lidar data [J]. Computers and Electronics in Agriculture, 2019, 163: 104871.
[19] 杨玉泽, 林文树. 基于激光点云数据的树木枝叶分割和三维重建[J]. 西北林学院学报, 2020, 35(3): 171-176.
Yang Yuze, Lin Wenshu. Segmentation and 3D reconstruction of tree branches and leaves based on laser point cloud data [J]. Journal of Northwest Forestry University, 2020, 35(3): 171-176.
[20] Du S, Lindenbergh R, Ledoux H, et al. Adtree: Accurate, detailed, and automatic modelling of laser-scanned trees [J]. Remote Sensing, 2019, 11(18): 2074.
[21] Hu S, Li Z, Zhang Z, et al. Efficient tree modeling from airborne LiDAR point clouds [J]. Computer & Graphics, 2017, 67: 1-13.
[22] Rena J, Lucie H, Jan N, et al. Detailed reconstruction of trees from terrestrial laser scans for remote sensing and radiative transfer modelling applications [J]. In Silico Plants, 2021, 3(2): 1-21.
[23] Chen Wei, Xiang Haibing, Moriya K. Individual tree position extraction and structural parameter retrieval based on airborne LiDAR data: Performance evaluation and comparison of four algorithms [J]. Remote Sensing, 2020, 12(3): 571.
[24] Giona, Matasci, Nicholas, et al. Mapping tree canopies in urban environments using airborne laser scanning (ALS): A vancouver case study [J]. Forest Ecosystems, 2018, 5(4): 429-437.
[25] Yin T, Cook B D, Morton D C. Three-dimensional estimation of deciduous forest canopy structure and leaf area using multi-directional, leaf-on and leaf-off airborne lidar data [J]. Agricultural and Forest Meteorology, 2022, 314: 108781.
[26] 張莹莹, 周俊. 基于激光雷达的果园树干检测[J]. 中国农业大学学报, 2015, 20(5): 249-255.
Zhang Yingying, Zhou Jun. Laser radar based orchard trunk detection [J]. Journal of China Agricultural University, 2015, 20(5): 249-255.
[27] 牛润新, 张向阳, 王杰, 等. 基于激光雷达的农业机器人果园树干检测算法[J]. 农业机械学报, 2020, 51(11): 21-27.
Niu Runxin, Zhang Xiangyang, Wang Jie, et al. Orchard trunk detection algorithm for agricultural robot based on laser radar [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(11): 21-27.
[28] Zhang C, Yang G, Jiang Y, et al. Apple tree branch information extraction from terrestrial laser scanning and backpack-lidar [J]. Remote Sensing, 2020, 12(21): 3592-3609.
[29] Wang K, Zhou J, Zhang W, et al. Mobile lidar scanning system combined with canopy morphology extracting methods for tree crown parameters evaluation in orchards [J]. Sensors, 2021, 21(2): 339-354.
[30] 范伟伟, 刘浩然, 徐永胜, 等. 基于地基激光雷达和手持式移动激光雷达的单木结构参数提取精度对比[J]. 中南林业科技大学学报, 2020, 40(8): 63-74.
Fan Weiwei, Liu Haoran, Xu Yongsheng, et al. Comparison of extraction precision of individual tree structure parameters based on terrestrial laser scanning and hand-held mobile laser scanning [J]. Journal of Central South University of Forestry & Technology, 2020, 40(8): 63-74.
[31] Zhang W, Qi J, Wan P, et al. An easy-to-use airborne lidar data filtering method based on cloth simulation [J]. Remote Sensing, 2016, 8(6): 1-22.
[32] 刘浩然, 范伟伟, 徐永胜, 等. 基于无人机激光雷达点云数据的单木分割研究[J]. 中南林业科技大学学报, 2022, 42(1): 45-53.
Liu Haoran, Fan Weiwei, Xu Yongsheng, et al. Research on single tree segmentation based on UAV LiDAR point cloud data [J]. Journal of Central South University of Forestry & Technology, 2022, 42(1): 45-53.
[33] Hackenberg J, Wassenberg M, Spiecker H, et al. Non destructive method for biomass prediction combining TLS derived tree volume and wood density [J]. Forests, 2015, 6(12): 1274-1300.
[34]
Alexa M, Behr J, Cohen-Or D, et al. Computing and rendering point set surfaces [J]. IEEE Transactions on Visualization and Computer Graphics, 2003, 9(1): 3-15.
[35]
Markku A, Raumonen P, Kaasalainen M, et al. Analysis of geometric primitives in quantitative structure models of tree stems [J]. Remote Sensing, 2015, 7(4): 4581-4063.