基于二维激光雷达的果树冠层结构信息检测方法研究
2024-05-30周良富宋海潮周彬彬于鹏代祥
周良富 宋海潮 周彬彬 于鹏 代祥

摘要:果树冠层结构信息获取是变量喷雾作业重要前提,为实现果树冠层结构信息在线采集,采用二维地面激光雷达对不同叶面积指数的果树进行,并运用MATLAB软件绘制果树的三维点云图。绘制出的果树三维点云图与实际果树形态的一致,表明点云数据与果树结构信息具有高度相关性。研究结果表明采用2D LiDAR测量树高与树宽的相对误差分别为2.22%和4.11%,但树厚的精度与LAI相关,LAI由0增加到3.68时其测量相对误差由5.3%增加到41.1%。拟合出正面和背面扫描时的LAI预测模型分别为y=1.265x-0.313 7和y=1.230 5x-0.338, F检验结果显示样本间存在显著性差异,且其模型的拟合优度均大于0.9。该研究可以为果园变量喷雾决策提供技术与模型支撑。
关键词:果树;变量喷雾;叶面积指数;激光雷达;点云
中图分类号:S491
文献标识码:A
文章编号:2095-5553 (2024) 05-0147-07
收稿日期:2023年10月31日 修回日期:2024年3月8日*基金项目:江苏省农业自主创新基金(X(22)3103);南京工業职业技术大学科研启动基金项目(YK20—14—04)
第一作者:周良富,1983年生,江西玉山人,博士,副研究员;研究方向为植保机械。E-mail: 2020101069@niit.edu.cn
Research on the detection method of fruit tree canopy structure information
based on two-dimensional LiDAR
Zhou Liangfu, Song Haichao, Zhou Binbin, Yu Peng, Dai Xiang
(Nanjing Vocational University of Industry Technology, Nanjing, 210023, China)
Abstract:
The acquisition of information regarding fruit tree canopy structure is essential for optimizing variable spray operations. In order to enable real-time data collection on canopy structure, a two-dimensional (2D) ground laser radar was employed to scan fruit trees with varying Leaf Area Index (LAI) in this study. Three-dimensional (3D) point cloud images of the fruit trees was generated by using MATLAB software, and was consistent with the actual tree morphology, which indicated a strong correlation between the point cloud data and structural information of the fruit tree. The results revealed that the relative errors of tree height and tree width measured by utilizing 2D LiDAR were 2.22% and 4.11%, respectively. However, the accuracy of tree thickness was found to be influenced by LAI, the relative measurement errors for thickness increased from 5.3% to 41.1% when LAI increased from 0 to 3.68. The predictive models for LAI were developed for frontal and dorsal scans, with equations of y=1.265x-0.313 7 and y=1.230 5x-0.338, respectively. F-test results highlighted significant differences among the samples, with model goodness of fit exceeding 0.9. This study offers valuable technical insights and model support for decision-making in orchard variable spray operations.
Keywords:
fruit tree; variable spray; leaf area index; LiDAR; point cloud
0 引言
果园变量喷雾是实现精准施药的一种重要技术手段。而果树冠层结构信息是实现变量喷雾的前提,当前主要采用非接触式的冠层探测手段,获取果树冠层结构、形貌和密度等参数,变量喷雾系统根据施药决策模型反馈的施药参数动态调节施药量,实现按需施药的目的[1],其中冠层结构特征采集及分析已经引起广大学者的高度重视。
果树冠层结构信息是果园变量喷雾最重要的环节之一,是变量喷雾参数控制与执行的基础数据基础[2]。传统的果树体积测量主要采用采摘果树叶片样本法,不仅效率低成本高,而且对果树破坏造成不可逆的破坏。进入21世纪以来,各种非接触式的测量方法被应用到果树冠层测量中,包括微波雷达法[3]、高清X射线扫描法[4]、光学传感法[5, 6]、超声波传感法[7]、立体视觉法[8, 9]和LiDAR(light detection and ranging)传感法[10],但受空间分辨率、果园相对密闭的关照等条件限制,只有超声波传感法和LiDAR传感法是目前最被广泛认可地应用于果树冠层结构信息采集的方法,而超声波传感法通过测出冠层外边界与每个传感器之间的距离计算冠层宽度,然后计算区域冠层面积和树冠总体积[11],受超声波束扩散的影响,测量误差大,只能估算冠层体积,而且对冠层的孔隙度、叶面积指数等参数无能为力。
与超声波传感测量法相比,LiDAR传感测量法具有测量精度高、速度快等优点,采用适当的算法可以将3D点云数据重构出高精度的果树结构[12, 13]。目前的研究主要是激光点云与冠层结构之间的关系,如Walklate等[14]根據LiDAR传感器测量激光的位置与角度,测量树高、树宽等结构信息。周梦维等[15]采用机载LiDAR,通过对激光回波波形的拟合,实现作物与土壤分离,结合冠层结构特征获取作物冠层高度,相对误差小于5.2%。Ricardo等[16]设计了三维激光扫描系统,试验研究了激光在冠层上的撞击数与叶面积的关系。张美娜等[17]采用LiDAR传感器研究了激光点云数与叶片数之间的关系,并利用不同的拟合函数建立了点云数与叶片数的函数关系,模型决定系数均大于0.9。Sanza等[18]采用LiDAR在篱笆型果园中研究了冠层体积与实测叶面积密度间的相关性,相关性达到R2=0.87。由于激光束不能穿透过高叶面积指数LAI(leaf area index)的树冠,不能准确获取冠层后部的结构,会引起“阴影效应”[19],Escolà等[20]发现由于冠层内部枝叶的影响,采用LiDAR传感测量出的树冠体积大于实际体积。这些研究在果园变量喷雾中都有一定的应用,如Escolà[21]、李龙龙[22]等利用LiDAR传感器采集果树冠层信息指导变量喷雾作业,并研制了相应的变量喷雾机。在借鉴以上研究成果基础上,周梦维等[23]利用机载激光雷达的反射与回波,研究了叶面积体密度和叶面积指数模型,验证了激光雷达评估叶面积指数的有效性,但机载激光雷达采集尺度大精度低难以满足农业精细化作业要求。
本研究在LiDAR三维点云数据的基础上提取树高、胸径及最大覆盖面积,计算出点云密度,建立叶面积指数与点云密度的拟合模型。以期实现用点云密度来评估叶面积指数,为果园变量喷雾决策提供依据。
1 材料与方法
1.1 LiDAR 传感器
采用某公司的二维地面激光雷达SICK LMS5100,该传感器广泛应用于防撞、监视和机器视觉导航等工业领域。与3D激光扫描传感器相比,该2D传感器价格便宜,但只能扫描一个平面,而且扫描距离短。激光扫描器连续不停地发射905nm激光脉冲,由旋转光学机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个径向坐标为基准的二维扫描面。传感器采用5次回波技术测量障碍物距离,其扫描角度为-5°~185°可调,角度分辨率分别可以设置为0.167°、0.25°、0.333°、0.5°、0.667°、1°扫描频率可分别设置为25 Hz 、35 Hz、50 Hz、75 Hz、100 Hz,测量精度为12mm。
1.2 试验装置及仪器
本次试验主要采用的仪器设备包括激光扫描系统,叶面积扫描仪、仿真树、铅锤、米尺等。其中激光扫描系统包括LiDAR传感器、线性导轨、步进电机、控制柜、直流电源和控制电脑,系统主要用于采集果树三维点云数据,如图1所示。叶面积扫描仪主要用于测量叶片面积,铅锤和米尺主要用于测量果树最大边界位置。仿真树中的单个叶片面积一致,且每个枝条可任意拔插。
1.3 研究方法
1.3.1 三维点云生成理论
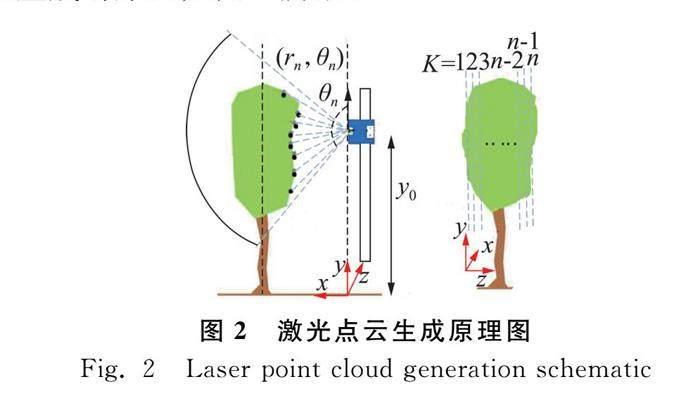
LiDAR传感器以一定的扫描频率,在一定的扫描角度下连续不断发射激光脉冲,当激光脉冲撞击冠层靶标时返回撞击点与激光发射点的距离值。其激光点云生成的原理如图2所示。
以传感器初始位置为Z=0,在Sopcast软件中读取激光扫描的角度θ、距离R,第i次扫描的时间ti等,并以.xls文件输出。将每个激光点的极坐标(Ri, θi)按式(1)~式(2)转化为直角坐标(Xi,Yi),而激光扫描的同时线性导轨上的滑块开始以速度v匀速运动,则Z方向的坐标按(2)式计算。
2 结果与分析
2.1 果树三维点云构建结果
在实验室条件下,以开心型仿真树为对象。树高为2.3m,最大胸径为1.68m,总叶片数为1000片,如图4(a)所示。设置激光雷达的扫描角度分辨率为0.5°,扫描频率为50Hz,扫描速度为0.15m/s。在SOPAST软件中 采集每个激光碰撞点的角度、距离及时间。根据式(1)~式(3)分别计算出每个激光碰撞点的空间坐标,然后运用MATLAB软件的scatter3(X,Y,Z)函数生成扫描区域的三维点云图,消除相关环境非靶标点后得到仿真树单次正面扫描的三维点云图,如图4(b)所示。
为了更全面构建出果树的三维特征,将分别从果树正、反两面扫描,并将2次的点云数据在一个坐标系融合。由于本实验台激光雷达传感器是固定的,因此将果树旋转180°进行反面扫描,以正面扫描时的坐标系为基准,反面扫描时的坐标转化到基准坐标系中,具体的转化算法为
xij′=2L-rijcosθj
(5)
yij′=y0+rijsinθj
(6)
zi′=L′-v·ti
(7)
式中:
xij′、yij′、zi′——
反面扫描时转化后的坐标值;
L——
雷达与果树杆中心的距离,m;
L′——雷达直线运行距离,m。
最后将正、反两次扫描得到的数据矩阵[x,y,z]和[x′,y′,z′]合并为同一矩阵[X,Y,Z],并生成三维点云图,如图4(c)所示。虽然一侧扫描时后部会被前部的冠层遮挡,导致激光束无法穿过生成激光点,但由图4(b)可直观看出一侧扫描的点云图更能反映实际的冠层结构,因为两侧扫描时同一片树叶会被扫描两次造成点云堆积,而且对点云融合的精度要求很高,点云融合的微小误差都会造成冠层内部结构的失真。因此在后续研究点云与叶面积指数关系时采用单侧扫描法。
2.2 不同叶面积指数的点云图
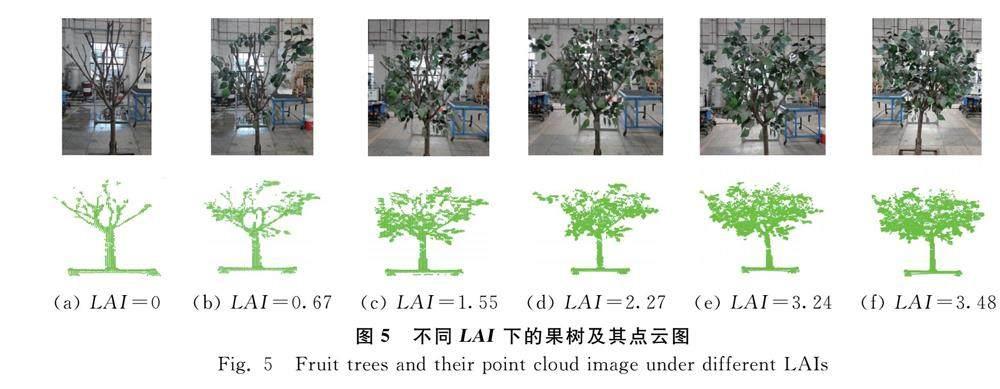
采用叶面积仪测量出10个叶片得平均叶面积为0.007m2。根据式(3)计算出叶片数为1000、950、900、850、800、…、300、250、200、150、100和0所对应的叶面积指数为3.68、3.5、3.48、3.36、3.18、3.24、3.02、2.8、2.64、2.5、2.27、2.04、1.87、1.81、1.55、1.42、1.21、0.67、0.33和0。为观察扫描的三维点云图与实际果树形态的一致性,文中显示叶面积指数为0、0.67、1.55、2.27、3.24和3.48下的果树照片及其点云图,如图5所示。由图5可直观反映出点云数据与实际形态的一致性,因此也侧面验证了采用该系统及方法来获取果树形态特征的有效性。
2.3 冠层几何结构信息
2.1节只是说明了激光点云数据可以定性分析果树几何形态,而果园变量喷雾作业中更关注对冠层结构定量分析,其中冠层靶标边界是对靶喷雾和变量喷雾的最基本信息。为评估激光雷达扫描法测量果树树高、树宽(行走方向)和树厚(喷雾方向)的精度问题。对特定仿真树进行了5次扫描,提取树高与树宽数据并分别求平均值,与实际测量值比较求取相对误差如表1所示,可知激光雷达扫描获取树高与树宽的精度较高,其相对误差分别为2.22%和4.11%,其中树高测量主要与传感器精度有关,而树宽还受扫描速度稳定性和认为操控影响,因此树宽的精度低于树高的测试精度。
由于激光不能穿透实体叶片,因此难以获取高叶面积指数果树的准确厚度,为评价叶片对激光的遮挡效应。采用激光扫描叶面指数分别为0、0.67、1.42、1.71、2.27、2.8、3.18和3.68仿真果树,提取相应的厚度数据并与实际测量值比较,计算相对误差如表1所示。由表1可得出,叶面积指数越大,其叶片对激光的遮挡效应越明显,导致树厚度测量精度越低,LAI由0增加到3.68时,其测量相对误差由5.3%增加到41.1%,因此对高LAI郁闭果树而且其厚度测试误差可能会超过70%。为更直观反映LAI对激光雷达识别果树靶标边界的精度,图6直观给出LAI为3.5、2.27和0.67的3种的点云俯视图(XZ面),同时标注出树干(红点)及8个边界点(绿点)位置。由图6(c)可看出在高叶面积指数下,其背部基本没有激光点,对于低叶面積指数的冠层靶标,其边界识别精度较高。
2.4 叶面积指数评估模型
叶面积指数是衡量果树疏密的重要指标之一,也是指导变量喷雾较为有效的参数,针对目前难以在线获取叶面积指数的难题,采用激光传感器可以在线获取激光点云密度(单位土地面积上的点云数),因此建立激光点云密度与叶面积指数之间的关系模型具有实际应用意义。文中的点云密度是指单棵仿真果树所占土地面积与所有叶面的点云数之比。
为降低树干对扫描点云数据的影响,将所有80组数据按正面扫描和背面扫描分成2大组分别统计出点云数后,将所有点云数减去叶面积指数为0的点云数据得到不同叶面积指数下的总叶片点云数,并分别计算点云密度,得到正面和背面扫描的2个点云密度矩阵,其中正面扫描的点云密度矩阵为[2.888、2.867、2.872、2.869、2.751、2.671、2.711、2.489、2.340、2.225、1.984、1.824、1.677、1.632、1.569、0.813、0.240、0、2.836、2.817、2.924、2.968、2.895、2.794、2.649、2.427、2.277、2.160、1.919、1.734、1.766、1.824、1.677、1.632、1.569、0.813、0.240、0],2个点云密度所对应的叶面积指数矩阵均为[3.684、3.5、3.481、3.361、3.182、3.241、3.025、2.809、2.642、2.5、2.273、2.045、1.879、1.815、1.556、1.423、1.217、0.667、0.333、0、3.684、3.5、3.481、3.361、3.182、3.241、3.025、2.809、2.642、2.5、2.273、2.045、1.879、1.815、1.556、1.423、1.217、0.667、0.333、0]。运用EXCEL 2010软件,以点云密度为横坐标以叶面积指数为纵坐标分别建立正面和背面激光扫描时的散点图,采用线性回归的方法分别拟合出基于点云密度的叶面积指数预测模型(图7)。其正面和背面扫描时的预测模型分别为y=1.265x-0.313 7和y=1.230 5x-0.338,模型的方差分析结果如表2所示,F检验结果显示样本间存在显著性差异,且其模型的拟合优度均大于0.9。
3 结论与建议
3.1 结论
通过搭建激光雷达扫描系统,以仿真树为对象,测试不同叶面积指数下的点云数据,经数据分析得出以下结论。
1) 采用2D LiDAR扫描系统及方法获取不同叶面积指数的仿真树的点云数据,果树三维点云图与实际果树形态的一致性表明该系统及方法的可行性。
2) 采用不同方向对果树进行激光扫描,可以更准确获取形态数据,但点云融合的微小误差都会造成冠层内部结构的失真,结合实际变量喷雾作业场景,建议以单侧扫描法进行更进一步研究。
3) 采用2D LiDAR测量树高与树宽的精度较高,其相对误差分别为2.22%和4.11%,但树厚的精度与LAI相关,LAI由0增加到3.68时其测量相对误差由5.3%增加到41.1%,说明LAI越大对激光的遮挡越严重。
4) 通过80组点云与叶面积指数数据,拟合出正面和背面扫描时的LAI预测模型分别为y=1.265x-0.313 7和y=1.230 5x-0.338,F检验结果显示样本间存在显著性差异,且其模型的拟合优度均大于0.9。
3.2 建议
本文是基于类纺锤形仿真树开展的研究,其意义在于验证建立点云密度与叶面积指数关系模型的方法有效性及可行性,但模型适用性受树形影响较大,因此本研究结果只适用于与本研究对象相一致的果树。该研究可以为果树变量喷雾提供模型支撑,在果树变量喷雾应用中存在如下技术难点,值得后续关注。
1) 针对激光难以穿透高叶面积指数的果树冠层的问题,而图6显示激光可以穿透到高叶面积指数(LAI=3.5)的树干部分,因此对于高叶面积指数的冠层,可以采用半棵果树来计算相应的叶面积指数及点云密度。而实际施药作业时雾滴也难以穿透高叶面积指数的整个冠层,符合实际应用需求。
2) 一般来说,果树植保喷雾都是在行间两侧同时喷雾,因此变量喷雾时需要同时探测两行的冠层信息。为提高传感器使用效率,降低成本,对于低矮型的果树,可以将LiDAR吊装于与冠层高度齐平的位置,从-5°~185°全域扫描,提取冠层信息。但对于高大型果树,建议每侧单独安装一个LiDAR传感器,根据树高设置扫描角度。
3) 为避免喷雾农药雾滴对LiDAR的污染造成测量精度降低的问题,要求LiDAR与出风口保持一定的距离。对于可以快速响应的喷雾系统,要求LiDAR冠层信息采集与喷雾执行在线响应,可以将LiDAR以一定的侧向角度安装于远离出风口,确保LiDAR扫描面在喷雾区内、强扰动区域以外,实现在线变量喷雾,同时避免农药雾滴对LiDAR的污染。
4) 本文只研究一种树形在特定扫描参数下(扫描角度分辨率为0.5°,扫描频率为50Hz,扫描速度为0.15m/s)的点云数据,以验证方法的可行性,后续还将以扫描参数为变量进行正交试验,得出适应性更强的拟合模型。
参 考 文 献
[1] 邱白晶, 闫润, 马靖, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015, 46(12): 59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12): 59-72.
[2] 周良富, 薛新宇, 周立新, 等. 果园变量喷雾技术研究现状与前景分析[J]. 农业工程學报, 2017, 33(23): 80-92.
Zhou Liangfu, Xue Xinyu, Zhou Lixin, et al. Research situation and progress analysis on orchard variable rate spraying technology [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(23): 80-92.
[3] Bongers F. Methods to assess tropical rain forest canopy structure: An overview [J]. Plant Ecology, 2001, 153(5): 263-277.
[4] Stuppy W, Maisano J, Colbert M, et al. Three-dimensional analysis of plant structure using high-resolution X-ray computed tomography [J]. Trends in Plant Science, 2003, 8(1): 2-6.
[5] Giuliani R, Magnanini E, Fragassa C,et al.Ground monitoring the light shadow windows of a tree canopy to yield canopy light interception and morphological traits [J]. Plant Cell Environment, 2000, 23(3): 783-796.
[6] 夏春华, 施滢, 尹文庆. 基于TOF深度传感的植物三维点云数据获取与去噪方法[J]. 农业工程学报, 2018, 34(6): 168-174.
Xia Chunhua, Shi Ying, Yin Wenqing. Obtaining and denoising method of three-dimensional point cloud data of plants based on TOF depth sensor [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(6): 168-174.
[7] Hong Y, Heping Z, Richard D, et al. Evaluation of ultrasonic sensor for variable-rate spray applications [J]. Computers and Electronics in Agriculture, 2011, 75(5): 36, 173-191.
[8] Kise M, Zhang Q. Development of a stereovision sensing system for 3D crop row structure mapping and tractor guidance [J]. Biosystems Engineering, 2008, 101(2): 191-198.
[9] Francisco R, Qin Zhang, John F, et al. Stereo vision three-dimensional terrain maps for precision agriculture [J]. Computers and Electronics in Agriculture, 2008, 60(5): 133-143.
[10] Escolà A, Camp F, Solanelles F, et al. Variable dose rate sprayer prototype for dose adjustment in tree crops according to canopy characteristics measured with ultrasonic and laser LiDAR sensors [C]. In: Proceedings ECPA-Sixth European Conference on Precision Agriculture, 2007: 563-571.
[11] Llorens J, Gil E, Llop J, et al. Ultrasonic and LiDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods [J]. Sensors, 2011, 65(11): 2177-2194.
[12] Rosell J, Llorens J, Sanz R, et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LiDAR scanning [J]. Agricultural and Forest Meteorology, 2009, 149(12): 1505-1515.
[13] Rosell J R, Sanz R, Llorens J, et al. A tractor-mounted scanning LiDAR for the non-destructive measurement of vegetative volume and surface area of tree-row plantations: A comparison with conventional destructive measurements [J]. Biosystems Engineering , 2009, 102(2): 128-134.
[14] Walklate P, Cross J, Richardson G, et al. Comparison of different spray volume deposition models using LiDAR measurements of apple orchards [J]. Biosystems Engineering, 2002, 82 (3): 253-267.
[15] 周夢维, 柳钦火, 刘强, 等. 基于机载小光斑全波形LiDAR的作物高度反演[J]. 农业工程学报, 2010, 26(8): 183-188.
Zhou Mengwei, Liu Qinhuo, Liu Qiang, et al. Inversion for crop height by small-footprint-waveform airborne LiDAR[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(8): 183-188.
[16] Ricardo S, Jordi L, Alexandre E, et al. Innovative LiDAR 3D dynamic measurement system to estimate fruit-tree leaf area [J]. Sensors, 2011, 11(3): 5769-5791.
[17] 张美娜, 吕晓兰, 邱威, 等. 基于三维激光点云的靶标叶面积密度计算方法[J]. 农业机械学报, 2017, 48(11): 172-179.
Zhang Meina, Lü Xiaolan, Qiu Wei, et al. Calculation method of leaf area density based on three-dimensional laser point cloud [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 172-179.
[18] Sanza R, Rosella J, Llorensb J, et al. Relationship between tree row LiDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LiDAR 3D dynamic measurement system [J]. Agricultural and Forest Meteorology, 2013, 172(3): 153-162.
[19] Van D, Hoet D, Jonckheere W, et al. Influence of measurement set-up of ground-based LiDAR for derivation of tree structure [J]. Agricultural & Forest Meteorology, 2006, 141(10): 147-160.
[20] Escolà A, Camp F, Solanelles F, et al. Variable dose rate sprayer prototype for dose adjustment in tree crops according to canopy characteristics measured with ultrasonic and laser LiDAR sensors [C]. In: Proceedings ECPA-Sixth European Conference on Precision Agriculture, 2007: 563-571.
[21] Escolà A, Rosell P, Planas J, et al. Variable rate sprayer Part 1-orchard prototype: Design, implementation and validation [J]. Computers and Electronics in Agriculture, 2013, 95(3): 122-135.
[22] 李龙龙, 何雄奎, 宋坚利, 等. 基于变量喷雾的果园自动仿形喷雾机的设计与试验[J]. 农业工程学报, 2017, 33(1): 70-76.
Li Longlong, He Xiongkui, Song Jianli, et al. Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(1): 70-76.
[23] 周夢维, 柳钦火, 刘强, 等. 机载激光雷达的作物叶面积指数定量反演[J]. 农业工程学报, 2011, 27(4): 207-213.
Zhou Mengwei, Liu Qinhuo, Liu Qiang, et al. Inversion of leaf area index based on small-footprint waveform airborne LiDAR [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(4): 207-213.