面向激光雷达点云数据的多结构树种识别
2024-05-30陶旭余富强蔡金金么炜刘博
陶旭 余富强 蔡金金 么炜 刘博

摘要:針对由于树木种间相似性和种内差异性带来的识别困难,以及由于采集环境及设备的多样性导致的点云质量差异,提出面向激光雷达点云数据的多结构树种识别方法(MSTSR)。首先借助改进的组合采样策略,在有效降低数据冗余的同时,保留单木的主体枝干结构;其次通过内建的近邻感知与增强模块(NAE)层次化聚合点云属性,以形成高阶的语义描述;最后通过融合树冠、主干以及整树的多结构信息,生成跨尺度的树木点云表征。在地面激光雷达采集的树种点云数据集上验证该方法的有效性,该数据集由7个树种共690棵树组成的。结果表明:该方法的总体准确率达到94.2%。相比主流的PointNet和PointNet++深度点云分类网络,分别提升13.04和9.42个百分点;相比基于点云的多视图2D投影方法,提升8.19个百分点;相比基于多个测树因子的随机森林方法,提升24.63个百分点,从而证实采用深度网络直接进行树种点云识别的潜力。
关键词:树种识别;激光雷达;点云;深度学习
中图分类号:S771
文献标识码:A
文章编号:2095-5553 (2024) 05-0168-08
收稿日期:2022年11月10日 修回日期:2022年12月16日*基金项目:国家自然科学基金项目(61972132);河北省自然科学基金项目(F2020204009);河北省重点研发计划项目(20327404D,20327401D,21327404D);河北省引进留学人员资助项目(C20190342)
第一作者:陶旭,男,1998年生,石家庄人,硕士研究生;研究方向为计算机视觉、农业信息化。E-mail: sjz_taoxu@163.com
通讯作者:刘博,男,1981年生,河北保定人,博士,副教授;研究方向为计算机视觉、农业信息化。E-mail: boliu@hebau.edu.cn
Multi-structured tree species recognition for LiDAR point cloud data
Tao Xu1, 2, Yu Fuqiang1, 2, Cai Jinjin3, Yao Wei1, 2, Liu Bo1, 2
(1. College of Information Science and Technology, Hebei Agricultural University, Baoding, 071001, China;
2. Hebei Key Laboratory of Agricultural Big Data, Hebei Agricultural University, Baoding, 071001, China;
3. College of Mechatronical & Electrical Engineering, Hebei Agricultural University, Baoding, 071001, China)
Abstract:
Aiming at the difficulty of tree identification caused by the similarity between species and the difference between species, as well as the difference of point cloud quality caused by the diversity of collecting environment and equipment, a multi-structured tree species recognition method(MSTSR)based on LiDAR point cloud data was proposed. Firstly, a combined sampling strategy was designed to effectively reduce data redundancy while preserving the trunk and main branches of a single tree. Then, a built-in neighborhood awareness and enhancement(NAE)module was devised to hierarchically aggregate point cloud attributes into high-level semantic descriptions. Finally, three types of information extracted from the crown, trunk and entire tree were fused to generate the cross-scale representation. The effectiveness of the method was verified on a point cloud dataset consisting of 690 trees of seven tree species acquired by terrestrial LiDAR. The results demonstrated that the methods overall accuracy(OA)reached 94.2%. Compared with mainstream deep learning methods for point cloud classification, such as PointNet and Point Net++, the improvement was 13.04 and 9.42 percentage points, respectively. In addition, the proposed method was improved by 8.19 percentage points compared with the multi-view 2D projection method, and improved by 24.63 percentage points compared with the random forest method using multiple tree measurement factors. These results confirmed the potential of the deep point cloud network for tree species recognition.
Keywords:
tree species recognition; LiDAR; point cloud; deep learning
0 引言
森林资源为维护生态系统稳定、促进人类社会可持续发展提供了基础保障[1]。树种的自动化识别在林业资源的科学化管理、生物多样性保护等方面具有重要意义。树种识别的主要挑战在于:树木生长受天气、光照等等环境因素,以及自身生长阶段的影响,导致较大的种间相似性与种内差异性[2];树种识别应为后续工作,如疾病诊断[3]、植被覆盖度估计[4]、生态多样性研究[5]等提供决策支持,多样化的应用场景对识别算法的适用性提出了更高的要求。
针对这些问题,大量学者开展了一系列研究。根据所采用的数据源不同分为2D图像数据与3D点云数据两类。图像数据对拍摄设备要求相对简单且成像速度快,能够保留更丰富的纹理细节信息。根据个体拍摄的部位不同,可依据树种整体形态[6]、树冠[7]、树叶纹理[8]以及树皮[9]的图像信息,使用卷积神经网络(Convolutional Neural Networks,CNN)等模型进行树种识别。然而,以可见光为主的图像数据存在易受光照条件影响,拍摄距离受限,不适合大范围识别等问题。随着空间遥感技术的发展,光谱数据借助其表征信息丰富,空间分辨率高的优势,被大量用于林业资源勘测[10-12]。
机载激光雷达(Airborne LiDAR)[13]及地面激光雷达(Terrestrial LiDAR)[14]的使用有效拓展了植被测量的维度。目前面向点云数据的树种分类方法大致分为间接法和直接法两类。间接法主要从3D点云中推断结构特征[15-17]或提取多视角下的2D图像[18]。如王佳等[19]依据点云的三维坐标提取胸径、冠高、最长冠幅等6个测树因子作为分类依据;Seidel等[18]将单木的三维点云结构投影为多角度的2D图像,从而把点云分类转化为传统的图像分类问题。间接型的点云处理方法虽然可以有效利用已有的分类模型与经验,但其在点云数据转换过程中导致了不可逆的信息损失,在一定程度上限制了点云数据的性能发挥。随着深度学习技术的快速发展,特别是如PointNet[20],PointNet++[21]等一系列点云分类模型的提出,使得直接处理点云数据成为可能。如针对白桦树和落叶松的二分类问题,Liu等[22]提出的LayerNet树种识别网络,实现了92.5%的识别准确率,但该方法更注重树木的整体结构,缺乏对局部结构的感知;Chen等[23]提出的PCTSCN模型,其采用改进的最远点采样方法,从而达到了96%的分类精度。然而,已有点云特征学习方法并没有充分考虑树木自身的形态属性,以及由于采集环境及设备的多样性所带来的点云分布差异,从而限制了该类方法的适用性。
针对以上问题,本文提出面向激光雷达点云数据的多结构树种识别方法(Multi-structured Tree Species Recognition Method,MSTSR)。该方法主要包括两部分:一是多结构树种分类模型,其根据树木的生长分布先验知识,结合激光雷达的空间采样倾向,通过适应性地等容量划分树木的层次结构,构建整体与局部相结合的点云特征提取模型,为树种点云识别提供有效的解决方案;二是组合采样策略,通过以体素网格(Voxel Grid)为基础对点云坐标空间进行规范化划分,进而配合随机采样策略,相对于最远点采样,在保证分类精度的基础上,把采样复杂度由O(n2)降为O(n),提升模型训练及推理速度。
1 树种点云识别模型
主流点云分类网络,如PointNet[20]、PointNet++[21]等多是面向通用点云物体识别,该类物体表面的点云分布较为均匀。然而通过直观观察,单木点云具有明显的结构差异与分布差异。结构差异源于树木自然生长形态,如树冠与主干具有不同的表型特征;分布差异主要来自点云采集激光雷达的类型与参数差异,如地面激光雷达会获得较密集的下部枝干采样与较稀疏的冠层采样,而机载激光雷达则相反。本文提出了面向激光雷达点云数据的多结构树种识别网络(MSTSR),一方面融合不同尺度的树木结构特点以获得更具代表性的点云表征;另一方面借助组合采样策略从而专注单木的枝干結构特征,缓解由于点云分布差异带来的性能损失。
1.1 树种点云分类描述
给定含有c个树种,共M棵树组成的点云数据集T=t1,t2,…,tM,其中ti=pi1,pi2,…,piN为第i棵树中含有的N个点的集合,且pij∈Rd,j=1,2,…,N,d为每个点的维度。通常pij中只包含几何坐标(d=3),即pij=(xij,yij,zij)。实际情况中,每棵树包含数量不等的点,为了适配模型输入,这里假设每棵树中的点已降采样到固定的N个。
对于树种分类任务,分类模型将第i棵树的点云集合ti作为输入,以c个分类的置信度为输出,通常选择置信度最大的树种作为分类结果。
1.2 多结构树种点云识别网络
从结构上看,树木大致由树冠和主干两部分组成,且具有不同的表型特征,为了符合树木自身的结构特点,本文提出的多结构树种识别网络(MSTSR)将点云数据结构化采样(Structured Sampling,SS),即依据高度划分为上下两部分,从而形成了上层局部(树冠)、下层局部(主干)以及整树三个尺度的点云集合。虽然严格划分树冠与主干区域可促使模型学习更准确地局部特征,但考虑到树木形态的多样性,引入精确划分方法不仅会降低模型的泛化性,而且增加了额外的计算负担。此外,所提模型中的多尺度融合策略也内建了不同生长区域的互补机制。因此,使用启发式的等容量划分方法可以在保证适应性的同时,有效减少划分时带来的算力消耗。
网络整体框架如图1所示,由不同分支聚合的尺度结构特征经过拼接后,输入到一个多层感知机(Multi-layer Perceptron,MLP)产生分类结果。不同分支的配置相似,其核心为本文提出的近邻感知与增强模块(Neighborhood Awareness and Enhancement,NAE)。在每个结构分支中堆叠多个NAE,同时搭配降采样方法,从而形成了一种层次化特征聚合结构(Hierarchical Feature Aggregation,HFA)。具体为:在浅层的处理过程中,点云集合首先经过一个全连接层(Full Connected,FC)以及一个NAE层,实现每个点与其周围点初步的信息传递;进而被降采样后输入到不同的HFA分支网络,经过多个NAE进行特征提取,在分层聚合局部信息的同时对数据点继续进行降采样;最终经过最大池化层(Max Pooling)输出每个分支结构下的单一表示。
1.2.1 近邻感知与增强模块
受PointNet++[21]的启发,本文提出一种可插拔的近邻感知与增强模块(NAE),整体结构如图2所示。原始的点云数据为孤立的点,其无法感知其邻域的点云分布,因此难以描述复杂的结构变化。为解决这一问题,NAE对每个由MLP特征升维后的点进行特征聚合(Feature Aggregation,FA),即使用每个点的近邻信息作为该点的补充。特征聚合具体为:给定任意点集内的第j个点pj(为不失一般性,这里省略了用来描述集合归属的上标),确定其K个近邻组成的集合Nj,进而通过作用在Nj上的最大池化(Max Pooling)与平均池化(Mean Pooling)操作构建pj的局部增强表示fj,如式(1)所示。
1.3 组合点云降采样策略
影响树种点云识别性能的另一个关键是采样策略。在本文提出的学习模型中包含两个步骤的采样:(1)预处理阶段将原始点云数据降采样到规定数量以便输入网络;(2)在网络中为了获得更具语义信息的结构描述而进行的逐层降采样。采样策略的选择受到单木点云分布的影响。以本文采用的地面激光雷达点云数据为例,影响采样结果的因素主要来自两方面:一是树木点云不同部位的密度差异,如图3(a)所示,树木主干由于位置较低从而点密度更大;二是由于树冠易受到密集枝叶的影响,从而产生过多的噪声点。特别是对于落叶性树种,其识别精度不应受到季节影响。因此,在预处理阶段的采样方法应倾向于保留单木的枝干属性。然而,目前常用的最远点采样方法[21],其通过由随机种子构成的集合开始,通过迭代式地查找距离当前集合最远的点,从而逐渐扩充采样集合。该种采样方式更倾向于描述物体的外围轮廓,如图3(b)所示,最远点采样保留了更多的树冠叶片分布,而失去了内在的枝干结构。不仅如此,该采样算法的复杂度为O(n2),当点集容量过大时,采样效率会明显降低。
针对以上问题,本文提出了一种两阶段的组合采样策略,从而在有效缓解点云密度差异,凸显枝干结构分布的同时,把采样复杂度降至O(n)。具体做法如下:第一阶段使用体素降采样(Voxel Grid Down-sampling),该方法通过把空间划分为若干固定边长大小的立方体体素块,并在每个体素块内保留固定数量的点,以实现采样结果的均匀化;第二阶段为以体素块为单位进行随机采样,从而保证了采样效率。经过采样后的结果如图3(c)所示,可以看出相比最远点采样,本文采用的方法可以更有效地捕捉枝干信息。此外,由于在预处理采样阶段已提升了输入点的均匀性,为了确保模型训练和推理的效率,在网络中的降采样也均使用随机采样方法。
2 试验结果与分析
2.1 数据集及预处理
数据集采用由Seidel等[18]搜集并整理的Single Tree Point Clouds from Terrestrial Laser Scanning (STPCTLS)Symbol`@@数据集。该数据集汇总了近年来若干项树木地面激光雷达点云研究所使用的数据,采集地点为德国和美国的人工森林和天然森林,采集土壤条件、气候特征具有较大差异,采集设备为Faro Focus 3D 120和Zoller and Frhlich Imager 5006地面激光雷达。Seidel通过扫描仪设备提供的处理软件对扫描结果进行后处理,过滤部分明显的噪声点、反射不清晰的点和分裂激光束产生的点,并使用3D可视化软件CloudCompare从森林点云中手动分割出单木点云数据。最终,该数据集由7类树种、共690棵树木组成,其中橡树(Oak)22棵、红橡树(Red Oak)100棵、梣树(Ash)39棵、云杉(Spruce)158棵、松树(Pine)25棵、山毛榉(Beech)163 棵、花旗松(Douglas Fir)183棵,代表性樹种样例如图4所示。
为了满足模型的输入要求,需要统一样本点云容量。由于样本容量由7万~240万不等,采用文本提出的组合采样策略,首先对其进行边长2 cm规格的体素采样,每个体素内仅保留距离中心点最近的点,再应用随机采样将样本降采样到4 096个点,并进行归一化处理,使点云中心位于(0, 0, 0)处。为了确保试验的公平性,本文采用与文献[18]类似的数据增强及随机划分协议。具体方法如下:绕Z轴随机选择0°~360°作为数据增强方式,对4类数量较多的树种(红橡树、云杉、山毛榉和花旗松)增强4次;对剩下3类树种(橡树、梣树和松树)增强10次,设置如表2所示。
2.2 试验设置
所有试验均在同一台计算机进行,硬件配置为 Intel(R)Core(TM)i9-9900X,单块NVIDIA GeForce RTX 2080Ti GPU,软件环境为64位ubuntu 20系统,TensorFlow 1.11深度学习框架。训练时批处理大小(Batch Size)为12,使用Adam优化器且初始学习率(Learning Rate)为0.001,权值衰减(Decay)为0.95。训练时近邻聚合的范围设置为16,最大迭代次数设置为50。
2.3 评价指标
评价指标采用总体分类精度(Overall Accuracy,OA),其可以直接评价分类正确的比例,如式(4)所示。
2.4 树种识别结果与分析
表3为主流树种识别方法的结果对比,本文所提的方法取得了最高的分类准确率及Kappa系数。其中7类树种的总体分类准确率为94.20%,Kappa系数为0.927 6,橡树、红橡树全部分类正确,云杉、山毛榉和花旗松准确率分别达到96.77%、94.29%和91.89%,而梣树和松树由于样本量过少,准确率相对较低,为85.71%和80.00%。试验对比方法选择三类典型的树种识别算法,分别为:基于典型测树因子配合随机森林的方法[19]、点云深度网络分类方法[20, 21]以及多视角点云2D投影方法[18]。
2.4.1 与传统机器学习方法对比
本文选取王佳等[19]提出的测树因子配合随机森林方法作为对比。该方法从点云中提取了6种测树因子,并使用决策树、支持向量机和随机森林三类常见的分类器进行识别。从表3可以看出,采用测树因子配合传统机器学习分类方法的结果欠佳,总体准确率仅为69.57%,Kappa系数为0.641 2。原因如下:(1)该数据集中的树木点云采集于多个地点,且环境差异过大,仅六个测树因子无法充分体现树木的结构特征;(2)数据集质量不理想,存在样本扫描不全的现象,导致对应因子存在缺失或误差;(3)传统机器学习方法对特征学习能力不足。
2.4.2 与典型点云网络对比
将典型点云分类网络PointNet[20]和PointNet++[21]应用于该数据集,试验结果如表3所示。其中PointNet总体准确率为81.16%,Kappa系数为0.770 6,由于其仅对整体结构进行特征聚合,倾向于学习单木的整体结构,导致其对枝干尺度和整体结构相似的橡树、红橡树、梣树、松树和山毛榉五类树种分类结果均不理想;PointNet++在PointNet的基础上增加了层次化特征提取,总体准确率提升至84.78%,Kappa系数为0.815 3,对于橡树、红橡树、梣树和松树分类精度有了较大幅度的提升,但云杉和山毛榉两种树的分类精度有所下降。本文提出的多结构树种识别网络充分考虑了树木的整体和局部形态结构,同时有针对性地设计了采样方法,因此识别准确率较大幅度领先这两种方法。
2.4.3 与2D点云投影方法对比
Seidel等[18]将该数据集中的点云数据投影为多幅2D图像,进而采用卷积神经网络进行分类。如表3所示,该方式虽然利用多角度2D图像的互补性,最终取得了优于PointNet++的综合性能,但其并没有充分挖掘3D点云对空间结构的描述能力。图5为该方法与本文所提方法的混淆矩阵对比。
从图5可以看出,由于2D投影的方法更专注于轮廓信息,导致轮廓相似的树种间混淆程度较高,如梣树主要与山毛榉混淆,云杉与花旗松混淆,红橡树与其他树种均发生混淆。然而,本文方法由于充分考虑了不同尺度的结构特征,对于轮廓相似的树种,可通过进一步学习其枝干走向、尺度等特征以提高识别精度。因此,有效降低了梣树及云杉对其他树种的混淆度,特别是针对橡树和红橡树的识别准确率提升至100%,整体结果提升了8.2%。
2.5 主要参数分析
在所提模型中,具有采样点的数量、采样方式的选择、多尺度划分方式等主要参数,本节主要分析这些参数的取值以及对模型性能的影响,并给出一些较为通用的参数设置方案。
2.5.1 采样点数量的影响
样本点云的降采样数量对模型的分类精度和执行效率有重要影响,过少的采样量不足以描述树木结构特性,而过多的采样量会引入更多的噪声点,同时降低模型的执行效率。图6为不同降采样数量(从256~8 192)对算法性能的影响。可以看出结果符合预期,虽然由于种间的结构差异导致个别树种(如云杉)的结果不够稳定,但整体的分类准确度随着采样点数量的增加而提升,在达到4 096个时结果最佳。此外,过多的采样点也会增幅噪声的影响,因此在采样点达到8 192个时,准确率会有所下降。
2.5.2 降采样方式的影响
为了验证点云集合的降采样方式对模型精度的性能,本节在数据预处理阶段和分类模型中分别应用了组合采样、最远点采样、随机采样三种策略,结果如表4所示。
由表4可以看出:(1)在预处理阶段采用组合采样的综合结果高于最远点采样和随机采样,这是由于对于单木点云,最远点采样弱化对内部的枝干走向的建模,而这些枝干的生长结构对树种分类起到了重要作用;(2)网络内采用随机采样或最远点采样对结果影响不大,但随机采样在时间复杂度方面占有优势;(3)本文提出的预处理阶段的组合采样配合网络内的随机采样,同时兼顾识别准确性与识别效率。
2.5.3 尺度划分方式的影响
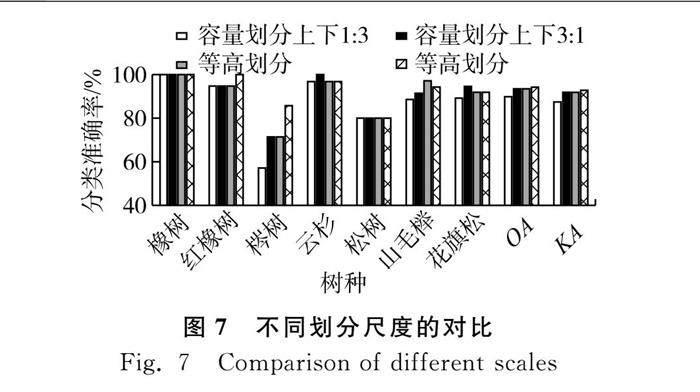
本文增加树冠与主干两个尺度的特征提取分支,辅助整树分支以提升分类正确率。为了验证不同尺度划分方式对结果的影响,测试4种设置:(1)等高划分上下两部分;(2)等容量划分上下两部分;(3)按容量比例1∶3划分上下两部分;(4)按容量比例3∶1划分上下两部分。
不同划分尺度的对比结果如图7所示。
可以看出:(1)由于种间的形态差异,没有任何一种划分方式在所有七类树种上均取得最佳结果。其中,由于云杉和花旗松由于树冠纵向覆盖区域较广,因此按容量3∶1的方式划分的性能最佳;山毛榉的树冠与主干占比近似,等高划分的性能最佳;(2)按高度划分由于兼容性较高,在所有四种划分方式中取得了次优的结果;(3)等容划分实际是在近似等高划分的基础上兼顾了不同分支的平衡,因此取得了最佳的结果。等容划分也是本文所提方法最终采纳的划分方式。
2.6 不同树木结构的影响
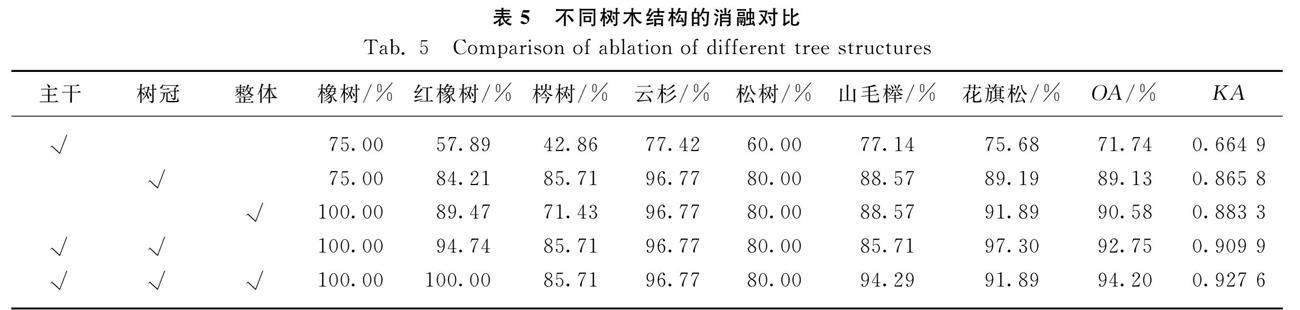
本文提出的树种点云识别方法同时考虑树冠、主干以及整树的结构,为了验证每种结构对最终识别结果的影响,表5为不同结构分支下的消融试验。
由表5可以看出:(1)只学习主干结构的结果最差,因为主干的结构形态在大多数情况下区分度较差;(2)同时考虑主干和树冠略优于只包含整体结构的结果,这是由于前者促使网络更加专注并融合多个局部区域;(3)整体和局部相结合的方式同时考虑多个尺度结构下的结构特征,取得最佳的识别结果,从而验证多结构学习的有效性。
3 结论
1) 本文提出一种面向激光雷达点云数据的多结构树种识别方法,其将单木点云数据划分为三个尺度结构(树冠、主干及整体),分别提取特征并加以融合;同时,搭配内建的近邻感知与增强模块,使模型分类总体准确率达到94.2%,Kappa系数为0.927 6。较基于多个测树因子的随机森林方法,OA提高24.63%,Kappa系数提高0.286 4;较经典点云网络PointNet和PointNet++,OA分别提高13.04%和9.42%,Kappa系数分别提高0.157 0和0.112 3;较多视图点云2D投影方法,OA提高8.2%,Kappa系数提高0.099 4,从而验證点云网络直接处理3D树木点云的潜力。
2) 树木点云数据具有相对复杂的结构特征,通过应用体素采样与随机采样相结合的采样策略,突出树木枝干结构信息,减弱叶片以及噪声点的干扰,较最远点采样和随机采样,OA分别提高3.62%和1.45%,为树种点云识别提供高效且通用的降采样方案。
3) 模型采用的多尺度融合方法,相比整树或树冠的单一尺度,OA分别提升3.62%及5.07%,从而证明该方法对树种点云识别的适用性。
参 考 文 献
[1] 张军国, 闫浩, 胡春鹤, 等. 无人机在林业中的应用及前景展望[J]. 林业工程学报, 2019, 4(1): 8-16.
Zhang Junguo, Yan Hao, Hu Chunhe, et al. Application and future development of unmanned aerial vehicle in forestry [J]. Journal of Forestry Engineering, 2019, 4(1): 8-16.
[2] Macfarlane D W, Kane B. Neighbour effects on tree architecture:Functional trade-offs balancing crown competitiveness with wind resistance [J]. Functional Ecology, 2017, 31(8): 1624-1636.
[3] 孙钰, 周焱, 袁明帅, 等. 基于深度学习的森林虫害无人机实时监测方法[J]. 农业工程学报, 2018, 34(21): 74-81.
Sun Yu, Zhou Yan, Yuan Mingshuai, et al. UAV real-time monitoring for forest pest based on deep learning [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(21): 74-81.
[4] Jia K, Yao Y J, Wei X Q, et al. A review on fractional vegetation cover estimation using remote sensing [J]. Advances in Earth Science, 2013, 28(7): 774-782.
[5] Fender A C, Gansert D, Jungkunst H F, et al. Root-induced tree species effects on the source/sink strength for greenhouse gases (CH4, N2O and CO2) of a temperate deciduous forest soil [J]. Soil Biology and Biochemistry, 2013, 57: 587-597.
[6] 馮海林, 胡明越, 杨垠晖, 等. 基于树木整体图像和集成迁移学习的树种识别[J]. 农业机械学报, 2019, 50(8): 235-242.
Feng Hailin, Hu Mingyue, Yang Yinhui, et al. Tree species recognition based on overall tree image and ensemble of transfer learning [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(8): 235-242.
[7] 滕文秀, 温小荣, 王妮, 等. 基于深度迁移学习的无人机高分影像树种分类与制图[J]. 激光与光电子学进展, 2019, 56(7): 277-286.
Teng Wenxiu, Wen Xiaorong, Wang Ni, et al. Tree species classification and mapping based on deep transfer learning with unmanned aerial vehicle high resolution images [J]. Laser & Optoelectronics Progress, 2019, 56(7): 277-286.
[8] 赵鹏超, 戚大伟. 基于卷积神经网络和树叶纹理的树种识别研究[J]. 森林工程, 2018, 34(1): 56-59.
Zhao Pengchao, Qi Dawei. Study on tree species identification based on convolution neural network and leaf texture image [J]. Forest Engineering, 2018, 34(1): 56-59.
[9] Zhao Y, Gao X, Hu J, et al. Tree species identification based on the fusion of bark and leaves [J]. Mathematical Biosciences and Engineering, 2020, 17(4): 4018-4033.
[10] Zhang B, Zhao L, Zhang X. Three-dimensional convolutional neural network model for tree species classification using airborne hyperspectral images [J]. Remote Sensing of Environment, 2020, 247: 111938.
[11] 姜玉峰, 齐建国, 陈博伟, 等. 基于无人机高光谱影像和机器学习的红树林树种精细分类[J]. 遥感技术与应用, 2022, 36(6): 1416-1424.
Jiang Yufeng, Qi Jianguo, Chen Bowei, et al. Classification of mangrove species with UAV hyperspectral imagery and machine learning methods [J]. Remote Sensing Technology and Application, 2021, 36(6): 1416-1424.
[12] 赵庆展, 江萍, 王学文, 等. 基于无人机高光谱遥感影像的防护林树种分类[J]. 农业机械学报, 2021, 52(11): 190-199.
Zhao Qingzhan, Jiang Ping, Wang Xuewen, et al. Classification of protection forest tree species based on UAV hyperspectral data [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(11): 190-199.
[13] Michaowska M, Rapiński J. A review of tree species classification based on airborne LiDAR data and applied classifiers [J]. Remote Sensing, 2021, 13(3): 353.
[14] Disney M. Terrestrial LiDAR: A three-dimensional revolution in how we look at trees [J]. New Phytologist, 2019, 222(4): 1736-1741.
[15] Terryn L, Calders K, Disney M, et al. Tree species classification using structural features derived from terrestrial laser scanning [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 168: 170-181.
[16] Mizoguchi T, Ishii A, Nakamura H. Individual tree species classification based on terrestrial laser scanning using curvature estimation and convolutional neural network [J]. International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, 2019, 42: 1077-1082.
[17] Guan H, Yu Y, Ji Z, et al. Deep learning-based tree classification using mobile LiDAR data [J]. Remote Sensing Letters, 2015, 6(11): 864-873.
[18] Seidel D, Annighfer P, Thielman A, et al. Predicting tree species from 3D laser scanning point clouds using deep learning [J]. Frontiers in Plant Science, 2021, 12: 635440.
[19] 王佳, 張隆裕, 吕春东, 等. 基于地面激光雷达点云数据的树种识别方法[J]. 农业机械学报, 2018, 49(11):180-188.
Wang Jia, Zhang Longyu, Lü Chundong, et al. Tree species identification methods based on point cloud data using ground-based LiDAR [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 180-188.
[20] Qi C R, Su H, Mo K, et al. PointNet: Deep learning on point sets for 3D classification and segmentation [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 652-660.
[21] Qi C R, Yi L, Su H, et al. PointNet++: Deep hierarchical feature learning on point sets in a metric space [J]. Advances in neural Information Processing Systems, 2017, 30.
[22] Liu M, Han Z, Chen Y, et al. Tree species classification of LiDAR data based on 3D deep learning [J]. Measurement, 2021, 177: 109301.
[23] Chen J, Chen Y, Liu Z. Classification of typical tree species in laser point cloud based on deep learning [J]. Remote Sensing, 2021, 13(23): 4750.
[24] He K, Zhang X, Ren S, et al. Deep residual learning for image recognition [C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778.