ARTHROBOT 机器人辅助全髋置换术的早期结果△
2024-05-20贾若真韩衍龙王利
贾若真,韩衍龙,王利*
(1.新疆维吾尔自治区人民医院骨科中心关节老年病区,新疆乌鲁木齐 830000;2.新疆医科大学研究生学院,新疆乌鲁木齐 830054)
髋关节置换术(total hip arthroplasty,THA)是现代医学最成功的手术之一[1],是治疗中晚期髋关节疾患的有效手段,在股骨头坏死、股骨颈骨折、髋关节发育不良和畸形等疾病的治疗中具有迅速改善关节功能、下地早、康复快、显著提高患者生活质量和满意度等优点[2]。然而在传统手工全髋置换术(manual total hip arthroplasty, mTHA)中,关节重建的成败与主刀医师的经验和水平密不可分,因此THA 的最终临床疗效常存在差异。髋关节生物力学受到股骨和髋臼前倾角、髋臼外展角、偏心距、旋转中心位置等多种因素影响[3],合适的假体尺寸和良好的置入角度是手术成功的重要因素,精准的重建有利于改善功能、减少术后并发症[4]。机器人辅助全髋置换(robot-assisted total hip arthroplasty, rTHA)于1992 年开始应用,至今已有30 余年历史[5]。有研究报道,相较于mTHA,rTHA 在髋臼磨削和假体定位方面效果更好[6]。机器人使THA 朝着精准化、微创化、智能化方向发展[7],为接受THA 的患者带来了福音。目前美国MAKO 机器人在THA 领域应用较多,而近年来随着技术的不断突破,我国骨科机器人由依赖进口逐步转向自主创新,国产机器人迅速崛起[8],作为国内首款可同时覆盖髋、膝关节置换的骨科机器人,ARTHROBOT(杭州键嘉)打破了进口产品长期垄断的局面。现基于国产骨科机器人的临床研究较少,故本研究对比ARTHROBOT 辅助THA 与传统mTHA 的临床疗效,以验证ARTHROBOT 的安全性和准确性。
1 资料与方法
1.1 纳入与排除标准
纳入标准:(1)行单侧THA,髋关节解剖结构基本正常;(2)手术入路为后外侧入路;(3)老年患者(年龄>60 岁)或中重度疼痛且关节功能丧失的青、中年患者;(4)临床资料及随访资料完整。
排除标准:(1)髋关节感染或其他部位严重感染性疾病;(2)患髋既往有手术史;(3)髋关节发育不良、严重畸形或髋臼明显骨缺损;(4)血管、神经损伤或肌肉功能不全者;(5)髋部肿瘤。
1.2 一般资料
回顾性分析2022 年4 月—2022 年11 月于本院行THA 患者的临床资料,共58 例患者符合上述标准,根据医患沟通结果将患者分为两组,rTHA 组28例,mTHA 组30 例。两组患者一般资料见表1,两组患者年龄、性别、BMI、病程、手术侧别、诊断的差异均无统计学意义(P>0.05)。本研究通过医院伦理委员会批准,所有患者均知情同意。
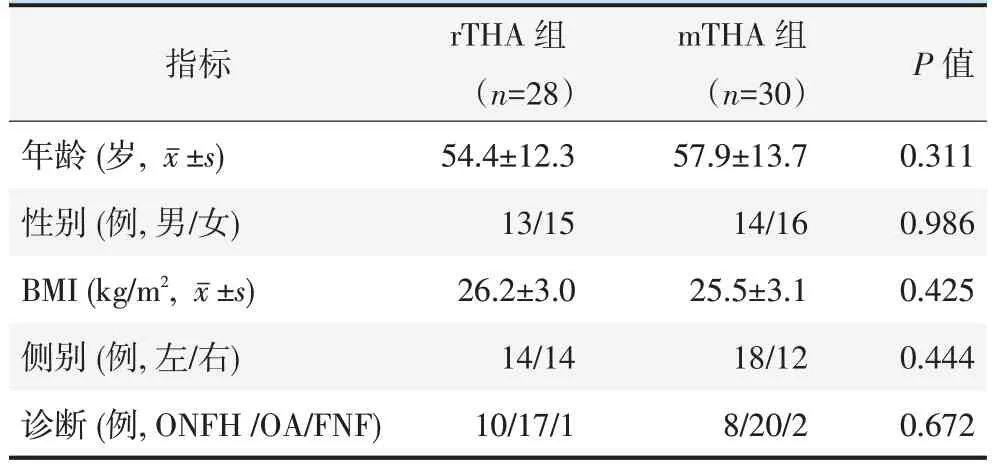
表1. 两组患者术前一般资料比较Table 1.Comparison of preoperative general data between the two groups
1.3 手术方法
所有手术均采用插管全麻,体位为健侧卧位,由同一位高年资医师主刀。
rTHA 组:术前行螺旋CT 扫描,扫描范围为双侧髂嵴至胫骨结节以下,扫描层厚为0.5~1 mm,将CT 数据导入ARTHROBOT 术前规划平台制订手术方案。术中,首先调整并注册机械臂,于患侧髂前上棘处置入2 枚克氏针以牢固安装骨盆参考架(图1a),取股骨外侧切口进行解剖直至切开关节囊显露股骨颈,自小粗隆上方0.5~1 cm 处行股骨颈截骨。注册髋臼,使用信号探针于计算机屏幕提示下采集30 个髋臼解剖位点进行注册并进一步验证,通过机械臂使用术前规划所选尺寸的髋臼锉磨削髋臼至目标位置(图1b),通过机械臂安装术前规划的假体至目标角度(图1c)。屈曲内旋下肢暴露股骨近端,扩髓后安装规划所选股骨柄及股骨头假体,复位下肢完成安装。

图1. 机器人辅助全髋置换(robot-assisted total hip arthroplasty, rTHA)。1a: 安装骨盆参考架;1b: 磨削髋臼;1c: 安装髋臼杯;1d: 影像测量,L1 为泪滴连线,L1 与L2 夹角为外展角(AAA),L3 和L4 分别为双侧小转子到泪滴连线的距离,两者之差为下肢长度差(LLD)。前倾角(AA)用Widmer[9]的方法计算)。Figure 1.Robot-assisted total hip arthroplasty(rTHA).1a:Install the pelvic reference frame;1b:Grinding acetabulum;1c:Install the acetabular component;1d:Image measurement.L1 is the tear drops connection line,the angle between L1 and L2 is the acetabular abduction angle(AAA),the distance from L3 to L4 presents that from the bilateral trochanter to the tear drop connection lines,respectively,and the difference between the both sides is the leg length discrepancy(LLD).The anteversion angle(AA)is calculated by Widmer method[9].
mTHA 组:术前根据1/1 正侧位X 线片、双下肢全长X 线片及CT 初步选择假体类型和型号并制定计划,术中基于试模安装情况进行调整。手术中,术者使用传统器械进行操作,充分显露股骨颈后自小粗隆上方根据经验截骨,人工磨削髋臼,参考患者体位及解剖标志(髋臼横韧带、卵圆窝、盂唇等),凭借经验进行髋臼杯定位,磨削深度根据骨床渗血情况判断,手工安装假体及内衬。然后,扩髓安装股骨侧假体,基于双侧髌骨、足跟对齐情况及关节囊紧张程度通过试模确定股骨柄及球头型号,完成安装。
所有患者切皮前30 min 预防性使用抗生素,并应用氨甲环酸减少术中出血;术后使用抗生素2 d,低分子肝素抗凝3 d 后改服利伐沙班,利用下肢间歇充气加压装置预防血栓;通过神经阻滞、滴注氟比洛芬酯进行镇痛,术后3 d 内完全负重下床活动,由同一康复师指导锻炼。术后1、6 个月、1 年进行随访。
1.4 评价指标
记录两组围手术期资料,包括手术时间、切口总长度、术中失血量及切口愈合情况及住院时间和费用。采用完全负重活动时间、疼痛视觉模拟评分(visual analogue scale,VAS)、Harris 评分、髋关节伸-屈活动度(range of motion,ROM)及内-外旋ROM 评价临床疗效。记录两组随访中脱位、感染、假体松动等事件发生情况及处理方式和结局。行影像学检查,测量双下肢长度差(leg length discrepancy,LLD)、髋臼外展角(acetabular abduction angle,AAA)、髋臼前倾角(acetabular anteversion,AA)、股骨偏心距(femoral offset deviation, FOD)、髋臼偏心距(acetabular offset deviation,AOD)和联合偏心距(combined offset deviation,COD)。测量方法见图1d。
1.5 统计学方法
2 结 果
2.1 围手术期情况
两组患者均顺利完成手术,无术中骨折或其他术中并发症。两组患者围手术期资料见表2,rTHA 组手术时间显著长于mTHA 组(P<0.05),rTHA 组切口总长度、治疗费用显著大于mTHA 组(P<0.05)。两组术中失血量、切口愈合情况及住院时间的差异均无统计学意义(P>0.05)。mTHA 组中1 例患者(外展角64°,前倾角32°)术后第3 d 因活动后髋关节脱位再次手术对髋臼侧假体位置进行调整,另1 例患者术后第10 d 因术侧髋部扭伤再次入院,复查X 线片未见假体位置不良(外展角43°,前倾角17°),保守治疗后康复出院。
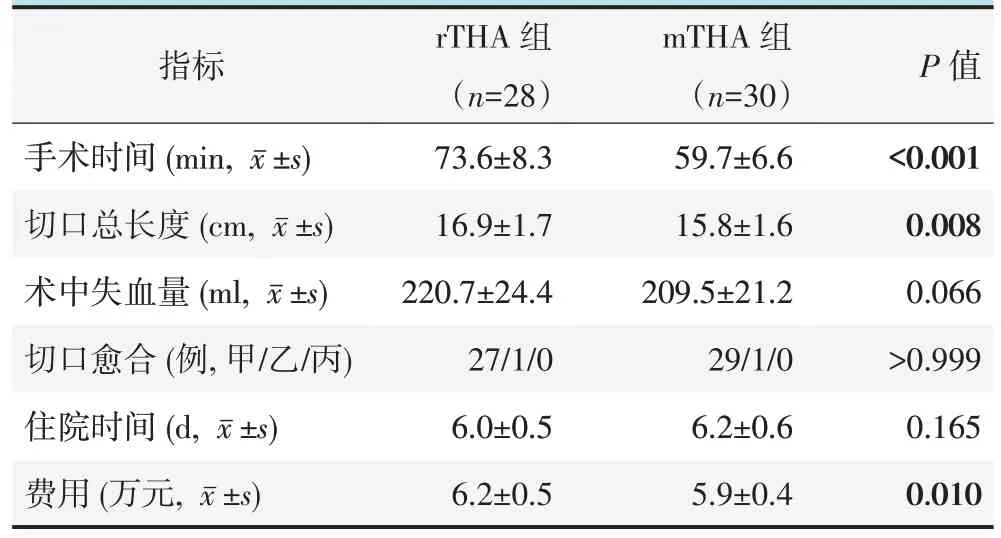
表2. 两组患者围手术期资料比较Table 2.Comparison of periperative data between the two groups
2.2 随访结果
两组患者均获随访6 个月以上。随访结果见表3。两组术后完全负重活动时间的差异无统计学意义(P>0.05)。随时间推移,两组患者VAS 评分显著减小(P<0.05),而Harris 评分、髋伸-屈ROM、髋内-外旋ROM 均显著增加(P<0.05)。rTHA 组术后1 个月、末次随访Harris 评分,及术后6 个月髋内-外旋ROM 均显著大于mTHA 组(P<0.05);其他相应时间点,两组VAS 评分、髋伸-屈ROM、髋内-外旋ROM 差异均无统计学意义(P>0.05)。两组患者均未出现假体周围感染或假体松动的情况。
表3. 两组患者随访结果(±s)与比较Table 3.Comparison of follow-up data between the two groups(±s)

表3. 两组患者随访结果(±s)与比较Table 3.Comparison of follow-up data between the two groups(±s)
指标完全负重活动时间(d)VAS 评分(分)术后1 个月术后6 个月末次随访P 值Harris 评分(分)术后1 个月术后6 个月末次随访P 值髋伸-屈ROM(°)术后1 个月术后6 个月末次随访P 值髋内-外旋ROM(°)术后1 个月术后6 个月末次随访P 值rTHA 组(n=28)2.0±0.6 1.4±0.8 0.5±0.7 0.4±0.6<0.001 70.8±3.3 87.8±5.3 92.0±3.6<0.001 83.2±5.9 110.2±10.4 119.5±10.1<0.001 33.4±5.1 48.5±5.9 59.6±5.8<0.001 mTHA 组(n=30)2.1±0.6 1.5±0.9 0.8±0.8 0.5±0.7<0.001 68.2±5.1 85.1±6.9 89.7±4.2<0.001 83.0±5.8 107.9±10.0 115.1±8.6<0.001 32.6±6.1 44.1±6.6 57.1±7.0<0.001 P 值0.598 0.441 0.218 0.615 0.043 0.158 0.025 0.925 0.386 0.077 0.579 0.009 0.144
2.3 影像评估
两组患者影像资料见表4,rTHA 组术后LLD、双侧FOD 差值、双侧AOD 差值、双侧COD 差值均显著小于mTHA 组(P<0.05),而两组AAA 和AA 差异无统计学意义(P>0.05)。以Lewinnek 安全区为标准,rTHA 组安全区内病例数占比显著高于mTHA 组(P<0.05)。两组典型病例影像见图2、3。

图2. 患者女性,38 岁,因右侧股骨头坏死行机器人辅助全髋关节置换术(rTHA)。2a: 术前正位X 线片示股骨头塌陷、关节间隙消失;2b: 术前侧位X 线片示股骨头明显破坏、关节间隙完全消失;2c: 术后6 个月正位X 线片见假体稳定、位置良好;2d: 末次随访侧位X 线片见假体位置良好,无假体松动、下沉或骨溶解。Figure 2. A-38 years-old female received rTHA for necrosis of the right femoral head. 2a: The preoperative anteroposterior (AP) X-ray showed the collapse of the femoral head with disappearance of the joint space of the right hip; 2b: The preoperative lateral radiograph showed obvious destruction of the femoral head with complete disappearance of the joint space; 2c: The AP X-ray 6 months postoperatively showed both acetabular and femoral prosthetic components were stable and in good position; 2d:The lateral radiograph at the latest follow-up showed that the prosthesis was in good position without loosening,subsidence or osteolysis around the prosthesis.

图3. 患者女性,53 岁,因右髋骨关节炎行传统手工全髋关节置换术(mTHA)。3a: 术前正位X 线片示关节间隙消失、软骨下骨硬化;3b: 术前侧位X 线片见关节间隙消失、髋臼周围骨赘形成;3c: 术后3 d 正位X 线片示关节脱位,外展角过大,之后再次手术调整假体;3d: 末次随访(术后7 个月)正位X 线片示假体稳定、位置良好。Figure 3.A-53 years-old female underwent mTHA for osteoarthritis of the right hip.3a:Preoperative AP X-ray showed disappearance of articular space with subchondral osteosclerosis; 3b: Preoperative lateral radiograph showed the disappearance of joint space with formation of osteophytes around the acetabulum;3c:The AP film 3 days after operation showed joint dislocation,with too large AA.The patient had to receive revision THA to adjust the prosthetic position; 3d:TheAP film 7 months after the revision surgery showed that the prosthesis was stable and in good position.
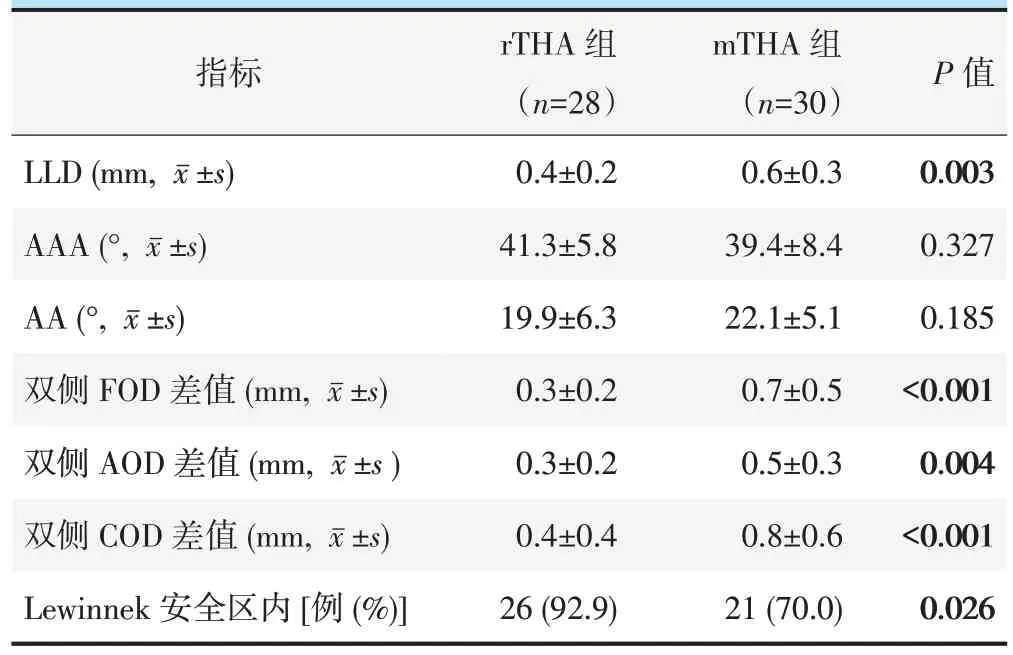
表4. 两组患者影像资料比较Table 4.Comparison of radiographical data between the two groups
3 讨 论
如今,机器人在关节置换领域得到迅速发展和推广,作为计算机与机械臂技术的优良结合体,机器人已然成为骨科手术技术革命的焦点[1]。在THA 中,假体置入位置是骨科医师最关心的问题,也是衡量手术成败的重要标准。良好的位置能减少假体接触面摩擦力,使术后人工关节应力分布更符合健康人生理状态,有利于关节功能恢复,延长假体寿命,而不恰当的位置可能带来更高并发症发生风险,如髋关节的撞击、疼痛、脱位、假体加速磨损和松动等[3,10,11]。Lewinnek 等[12]将前倾5°~25°、外展30°~50°定义为髋臼杯置入安全区,并指出该范围内关节脱位率为1.5%,而安全区外脱位率高达6.1%。
rTHA 有明显准确性优势,Zhang 等[13]指出,rTHA 在髋关节融合的疑难病例中可准确执行术前规划,置入目标区域的成功率明显高于人工组,两者安全区内占比分别为87.2%、55%。有文献证实机器人辅助复杂THA 可取得良好的短期疗效,改善髋关节活动度,缩小双侧肢体长度差,提高患者生活质量[14]。Tu 等[15]发现,rTHA 术后LLD 小于mTHA,表明rTHA 效果更佳。有文献报道,采用Widmer等[9]的方法计算髋臼杯前倾角更为准确[16],故作者选择了此方法。
本研究中,术后两组前倾角与外展角差异均无统计学意义,但rTHA 组髋臼杯在Lewinnek 安全区的比例高于mTHA 组,该结论与Zhang 等[13]的观点相似。笔者认为,ARTHROBOT 机器人有助于更精准置入假体,它通过注册骨盆位点、实时捕捉人机位置并显示手术进程,助力手术方案的精准执行,减少因患者体位不正或术者判断不准造成的失误,同时ARTHROBOT 的“数字虚拟墙”功能减少因过度磨削带来副损伤的可能,提高了其安全性。本研究中rTHA组健、患双侧FOD、AOD、COD 的差值均低于mTHA 组,体现了ARTHROBOT 重建旋转中心的准确性。有研究证实,rTHA 手术前后联合偏心距变化在5 mm 以内患者的占比显著高于mTHA,rTHA 组变化>10 mm 患者占比明显较低,并指出恢复联合偏心距有利于重建外展肌力臂、平衡软组织张力,使关节更稳定[17]。
LLD 是THA 疗效的重要评价标准,较大LLD 成为患者不满的主要来源,也是骨科领域诉讼的最常见原因[18]。Sykes 等[19]发现,LLD 超过5 mm 可被多数患者感知,Kawai 等[20]认为,患肢过度延长会降低髋关节活动度,另有研究表明,下肢长度与外展肌长度共同影响外展肌肌力进而影响疗效[21]。本研究中,rTHA 组LLD 显著小于mTHA 组,ARTHROBOT辅助下的rTHA 更有利于恢复患肢长度。
rTHA 亦有不足,本研究中rTHA 组手术时间及切口总长度显著大于mTHA 组。究其原因,rTHA 组术中髋臼注册、机械臂定位等步骤导致手术时间延长,而骨盆参考架的安装增加了切口长度。
作为国内首款同时兼容髋、膝关节置换和获批开放式置入物数据的关节机器人[22],ARTHROBOT 有诸多闪光点,其通过术前CT 信息与术中骨性解剖的智能关联精准执行手术方案,其7 轴机械臂有助于提高手术效率,它依靠数字虚拟墙技术严防截骨过度,实现精准操控。该机器人于2022 年4 月获NMPA 批准[22],应用时间较短,相关的研究鲜见报道,本研究通过分析其辅助THA 的早期疗效,验证了其安全性和精准性。
综上所述,ARTHROBOT 辅助THA 是提高假体置入准确度、恢复患髋偏心距和减少LLD 的有效手段,有利于实现良好的髋关节重建。但因病例数较少,ARTHROBOT 的远期疗效有待进一步研究。