基于无线通信网络技术的机器人巡检远程监控系统
2024-05-16李欣

摘要:本文介绍了一种基于蜂窝网络无线通信技术的机器人巡检远程监控系统,该系统由多个机器人节点和远程监控中心构成。硬件方面,系统采用了Logitech Harmony遥控器机器人、热线式温度传感器、AM335X ARM Cortex-A8处理器和5G全网通DTU TD210模块。同时,系统还采用了西门子工业软件Simatic IPC 330进行支持,并对该系统进行了电力输电线路的实地测试。经过测试,该系统在启动、运行和停止等方面表现出色。实际巡检和系统记录的数据比对结果证明,系统数据准确性较高。此外,无线通信网络的信号强度较强、数据传输速度较快、数据丢包率较低,通信可靠性较高,为系统的实际应用提供了保证。
关键词:无线通信;机器人;远程监控
工业机器人已经在石油、化工、冶金等行业中得到广泛的应用。它们可以代替人工进行生产过程中的各种检测和维护工作,具有安全、高效和准确的特点,能够有效提高企业的生产效率和产品质量。但在我国经济高速发展的背景下,能源和资源问题变得日益突出。特别是在电力行业中,如何进行日常维护成为一个重要问题。目前,电力行业普遍采用人工巡检方式对变电站等电力设备进行维护,但传统的巡检方式存在劳动强度大、效率低、人力成本高、巡检质量不可控等问题,严重影响了电力企业的生产效率和产品质量。
为了解决这些问题,许多国内电力企业积极探索机器人巡检技术,并将其应用于变电站等电力设备的巡检工作中,从而为电网的安全运行提供了有效保障[1-3]。本文针对目前电力设备巡检方式存在的劳动强度大、效率低、人力成本高等问题,提出了一种基于蜂窝网络无线通信技术的机器人巡检远程监控系统。该系统能够实现对变电站等电力设备巡检过程中各个环节信息的采集、处理和反馈,并通过网络将数据传输到后台管理中心。采用远程监控系统可以及时发现并处理设备异常情况,提高了巡检工作的质量和效率。通过这种基于蜂窝网络无线通信技术的机器人巡检远程监控系统,电力企业可以实现对电力设备的精准监控,降低劳动强度并节约人力成本。同时,机器人巡检技术的高效、准确和安全性,也可以提高巡检工作的质量和可控性。
一、系统需求分析
(一)市场需求分析
随着工业自动化和信息化的发展,机器人巡检远程监控系统的市场需求不断增长。这种系统可以实现对各种设备和设施的远程监控和巡检,提高生产效率和安全性。在这个背景下,无线通信网络技术的快速发展为机器人巡检远程监控系统的实现提供了新的解决方案。
(二)用户需求分析
机器人巡检远程监控系统需要具备先进的技术能力,以满足用户对实时监控和远程控制的需求。同时,系统应提供灵活的配置和管理选项,以满足不同用户的应用场景和需求。
(三)功能需求分析
机器人巡检远程监控系统需要具备感知层数据采集、数据传输、云端存储和处理、客户端远程监控和控制、报警和预警、程序调度和执行、用户管理等功能。
(四)技术需求分析
基于无线通信网络技术的机器人巡检远程监控系统需要具备无线通信网络技术、物联网技术、云计算技术、数据挖掘和分析技术、视频编码和传输技术、机器人控制技术等先进技术。
(五)性能需求分析
机器人巡检远程监控系统需要具备高可靠性、高实时性、高扩展性、高安全性和易用性等性能特点,以满足用户的需求和场景应用[4]。
(六)开发工具和环境需求分析
基于无线通信网络技术的机器人巡检远程监控系统需要使用合适的开发工具和技术。编程语言方面,常用的选择包括Java、Python、C++等;数据库管理系统方面,常用的选择有MySQL、Oracle等;在构建系统的框架方面,Spring、Hibernate等框架可以提供便捷的开发环境和模块化的架构组件。同时,系统还需要在合适的硬件和软件环境下进行开发和测试[5-8]。
二、机器人巡检远程监控系统
(一)系统总体结构
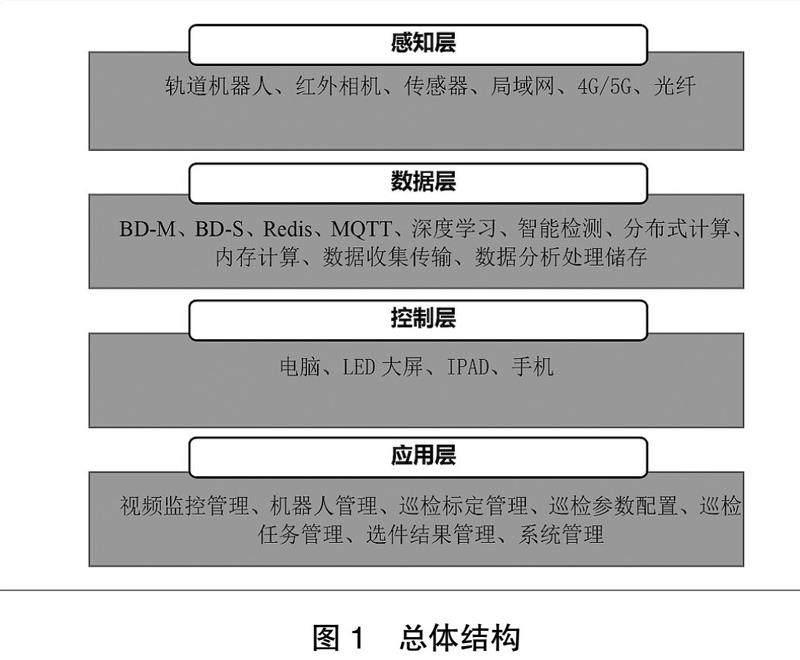
基于上述需求分析,本文设计了一种基于无线通信技术的机器人巡检远程监控系统,总体结构如图1所示。
感知层:负责采集环境数据和信息,涵盖各种传感器,如温度传感器、湿度传感器、光照传感器和气体传感器等。
数据层:负责采集和存储感知层采集的数据。数据采集层包括数据采集器和数据传输模块,将感知层采集的数据传输至云端服务器进行存储和分析。
控制层:负责控制机器人的行动和执行预设的程序。控制层包括控制模块和云端服务器,可以根据客户端发来的指令控制机器人进行巡检和数据采集。
应用层:负责为用户提供应用服务和数据展示。应用层包括客户端和云端服务器,用户可以通过浏览器或应用程序访问云端服务器,获取机器人巡检的数据信息和视频图像,实现对机器人巡检过程的远程监控和控制。
(二)硬件设计
本文设计了一种基于蜂窝网络无线通信的机器人巡检远程监控系统。该系统采用了传感器技术、嵌入式技术以及无线通信技术等,可以实现机器人巡检的自动化和远程监控。系统的硬件主要包括机器人本体、传感器模块、嵌入式控制器模块以及无线通信模块等。
机器人本体采用了罗技公司的Logitech Harmony遥控器,支持多种协议,可与各种品牌和型号的设备进行通信。该遥控器具有高灵敏度按键,操作简单方便,并支持蓝牙4.0和Wi-Fi等多种无线通信方式。传感器模块采用了霍尼韦尔公司的热线式温度传感器,能够测量广泛的温度范围,可达-50℃~150℃。該传感器模块具有高测量精度,可达±0.5℃,并且体积小,易于安装。它使用数字信号输出,具有强大的抗干扰能力。
嵌入式控制器模块采用了德州仪器公司的AM335X ARM Cortex-A8处理器,主频可达1GHz。内置SGX530图形处理器,支持高清视频播放。嵌入式控制器模块还支持多种外设接口,如USB、UART、SPI等。
无线通信模块采用了5G全网通DTU TD210模块,支持LTE Cat5网络,最大下行速率可达150Mbps。该模块支持多种工作模式,如LTE、WCDMA、GSM等。它体积小,易于集成,并支持透明数据传输。内嵌标准的TCP/IP和UDP/IP协议栈,并支持环保212协议和标准MQTT协议。
(三)软件设计
本系统采用西门子工业软件Simatic IPC 330。该型号具有丰富的接口、高可靠性、高扩展性等特点,可以满足大多数工业自动化应用的需求。此外,基于蜂窝网络无线通信的机器人选件远程监控系统是一种集传感器技术、嵌入式技术、无线通信技术等于一身的现代化工业自动化系统。该系统可以通过远程监控的方式,实时监测和管理机器人的工作状态、性能参数等,从而提高生产效率、降低成本、保障生产安全。系统主要包括以下几个方面。
实时监测:可以对机器人的位置、速度、姿态、工作状态等参数进行实时监测和记录,以便更好地了解机器人的工作情况。
远程控制:可以通过无线通信网络对机器人进行远程控制,如启动、停止、改变运动轨迹等操作,从而实现远程操作和管理。
数据存储与分析:可以将监测到的数据存储到数据库中,并利用相关分析工具进行数据分析和处理,以更好地了解机器人的性能和状态。
报警功能:可以对机器人的异常状态进行报警,并及时通知相关人员进行处理,以保障生产安全。
(四)功能模块
1.系统架构
机器人巡检远程监控系统由多个机器人节点和一个远程监控中心组成。机器人节点包括视觉传感器节点、温度传感器节点、振动传感器节点等多种类型。根据不同的巡检需求,可配置不同的传感器节点。机器人节点的数量和位置布局也根据实际巡检需求而定。例如,在需要进行大面积巡检的任务中,可以设置较多的机器人节点以提高巡检效率。
2.巡检规划
机器人巡检任务的具体规划包括巡检任务、巡检路径规劃和障碍物识别等。其中,巡检任务可根据实际需求而定,有设备温度监测、设备运行状态监测等。巡检路径规划可采用启发式算法,以实现最优或次优路径规划,提高巡检效率。障碍物识别用于确保巡检过程中避免碰撞和损坏设备,可通过视觉识别和超声波传感器等技术实现。
3.远程监控
远程监控中心的设计和部署应充分考虑硬件和软件平台的选择、联网方式和数据传输速率等因素。同时,为确保数据传输的实时性和准确性,远程监控中心应选择高速联网方式,如光纤通信等。在软件平台方面,应选择功能强大、易于操作和维护的软件系统,如基于云平台的远程监控软件等。此外,远程监控中心应具备报警提示功能,以便及时发现异常情况,采取相应措施。
4.数据处理与分析
针对巡检数据的管理和分析是整个系统中至关重要的一环。利用机器学习和预测算法等技术,可以对巡检数据进行处理和分析,从而制定更加准确的监控策略。例如,通过分析设备温度变化的规律,可以预测设备的寿命和潜在故障风险,从而及时采取维护措施。此外,还可以借助数据挖掘技术,从海量数据中提取有价值的信息,为决策提供依据。
三、系统测试
本次测试的目的是对基于无线通信网络的机器人巡检远程监控系统在电力输电线路中进行全面测试,包括系统稳定性、数据准确性、通信可靠性等方面。测试所使用的设备和工具包括机器人本体、传感器模块、嵌入式控制器模块以及无线通信模块等。测试方案和测试计划包括以下内容:
系统稳定性测试:测试系统在各种操作情况下的稳定性,包括启动、运行和停止等操作。同时,还将测试系统在高负载、低电压等恶劣环境条件下的表现,以验证系统的鲁棒性。
数据准确性测试:通过实际巡检过程中的数据和系统记录的数据进行比对,验证系统的数据准确性。
通信可靠性测试:测试无线通信网络的信号强度、数据传输速度和数据丢包率等关键指标,以验证通信的可靠性。
根据上述内容可知,系统启动、运行、停止等操作正常;在高负载、低电压等恶劣环境下表现稳定;实际巡检和系统记录的数据比对结果证明,系统数据准确性较高;无线通信网络的信号强度较强、数据传输速度较快、数据丢包率较低,通信可靠性较高。
四、结束语
通过实际应用验证,基于无线通信网络技术的机器人巡检远程监控系统在解决巡检过程中遇到的问题方面表现出色。该系统实现了巡检任务的自动化和远程化管理,显著提高了巡检的效率和准确性,也减少了人工巡检过程中的危险和风险。随着无线通信技术、传感器技术和人工智能技术的不断发展,机器人巡检远程监控系统将在更多领域得到应用,如无人驾驶、智能家居等。未来,该系统的应用将进一步扩展,为人们的生活带来更大的便利和价值。
作者单位:李欣 山西信息规划设计院有限公司
参考文献
[1]刘会军,刘金花,尹石岭.基于无线通信网络技术的机器人巡检远程监控系统[J].自动化与仪表,2023,38(05):57-61.
[2]郑伶俊.变电站巡检机器人系统设计与实现[J].机械制造与自动化,2023,52(02):162-165+188.
[3]陈丹,龚文森,邓国健,等.基于混合通信技术的巡检机器人远程监控系统研究[J].今日制造与升级,2022(01):27-29.
[4]潘宇.面向巡检机器人的远程运行管理及决策规划系统设计[D].浙江大学,2022.
[5]王吉岱,丁冠军,郝亚东.基于C#.NET技术的巡检机器人远程监控系统的研究[J].机床与液压,2018,46(09):38-41+46.
[6]黄郑,王永强,王红星,等.基于云雾边异构协同的无人机智慧巡检系统[J].中国电力,2020,53(4):161-168.
[7]许向南,闫利文,谢煜坚.基于移动终端的工业机器人远程监测与故障诊断系统设计[J].机床与液压,2021,49(23):73-76.
[8]傅贵武,田英,王兴波.基于SDK通信接口的工业机器人远程监控系统设计[J].机床与液压,2020,48(17):29-33.
李欣(1988-),男,汉族,山西太原,工程师,硕士,研究方向:无线通信。
