三维空间轨道角动量全息*
2024-05-13贾谊成张福荣张景风孔令军张向东
贾谊成 张福荣 张景风 孔令军 张向东
(北京理工大学物理学院,先进光电量子结构设计与测量教育部重点实验室,纳米光子学与超精密光电系统北京市重点实验室,北京 100081)
光的轨道角动量自由度已被作为一种新的信息载体用于光全息信息处理技术之中.然而,目前关于轨道角动量全息技术的研究主要集中在二维轨道角动量全息,即重构的二维全息图像位于三维空间中的某一个平面内.如何进一步实现三维空间轨道角动量全息技术并将其用于增加全息通信的信息容量仍然是一个空白.本文基于轨道角动量自由度和重构的二维图像在三维空间中的位置自由度,实现了三维空间轨道角动量全息技术.换言之,在我们实现的三维空间轨道角动量全息中,目标物体图像的获得不仅要求使用正确的解码轨道角动量态,还要求在正确的空间位置来探测物体的图像.此外,还进一步研究了三维空间轨道角动量全息复用技术,并指出该复用技术可用于信息加密.与传统的二维轨道角动量全息技术相比,三维空间轨道角动量全息技术使用了额外的自由度,即成像的空间位置.因此,基于三维空间轨道角动量全息技术的加密方案可以进一步提高信息的安全等级.我们的理论模拟结果和实验结果验证了三维空间轨道角动量全息技术以及三维空间轨道角动量全息加密技术的可行性.
1 引言
全息最初由Gabor[1]提出,如今已成为现代光学中的一项重要工具,广泛应用于三维显示[2-8]、光学显微[9-11]、光学加密[12-15]、信息存储[16]、拓扑结构的生成[17-20]等领域.光的不同自由度,如波长[21-24]、时间[25,26]和偏振[27-29]等,已被作为信息的不同载体,用于增加全息系统的信道容量.
近年来,光的轨道角动量(orbital angular momentum,OAM)自由度引起了广泛兴趣.由于OAM理论上具有无穷多的状态且不同的OAM 态之间相互正交,因此可以用于高维希尔伯特空间中编码信息.这带来了一系列应用,从光通信[30-34]到高维量子纠缠[35-40].令人兴奋的是,2019 年,OAM 被用作全息中的新自由度,用于信息处理,以进一步提高基于超表面的光通信的带宽[41].此后,对OAM全息的研究引起了广泛关注.2020 年,Fang等[42]实现了高维OAM 全息,并将其应用于全息加密,提高了加密的安全等级.同年,Ren等[43]基于超表面在动量空间中实现了复幅度OAM 全息,从而实现了无需空间扫描的光学全息视频显示.另一方面,Zhou等[44]基于超表面实现了偏振加密的OAM多路复用全息.2021 年,Fang等[45]在基波和二次谐波中同时实现了OAM 全息成像,并实验验证了该非线性全息技术的可行性.此外,Zhu等[46]提出了超密集完美OAM 全息,其中OAM 模式在径向位置自由度和角向自由度均可参与信息的携带.2022年,Wang等[47]提出了部分OAM 全息,将OAM模式划分为多个部分,并用不同的部分模式作为信息的载体对目标图像进行全息编码.2023 年,Shi等[48]提出了伪非相干方法,通过时间复用演示了类似于相干方法的解决方案,消除了串扰,大大放宽了对OAM 全息采样条件的约束,从而显著提高了分辨率.Zhang等[49]理论提出并实验证明了Laguerre-Gaussian (LG)全息,并实现了(radial index,OAM)跨度范围从(1,-15) 到(7,15)的可用于高安全性光学加密的26 位LG 多路复用全息.基于LG 全息,他们构建了一个高容量的全息信息系统.此外,基于高维OAM 纠缠,高维量子全息也得以实现.高维OAM 量子全息对经典噪声具有很好的鲁棒性,此外,量子叠加态的引入可进一步提高全息成像加密的安全等级[38].然而,这些研究仅集中在二维OAM 全息领域,重构的全息图像仅仅位于三维空间中的某个特定的二维平面内.虽然有些结果中展示了两个平面[43]的OAM 全息,但对于三维空间OAM 全息的研究仍然相对有限.如何进一步应用三维空间OAM 全息以增加全息通信的信息容量、提高全息加密的安全性仍然是一个空白.
本文在理论和实验上实现了三维空间OAM全息技术.在三维空间OAM 全息中,目标物体图像的获得不仅要求使用正确的解码OAM 态,还要求在正确的空间位置来探测物体的图像.此外,我们还将三维空间OAM 全息技术应用于信息加密.与二维OAM 全息相比,三维空间OAM 全息技术具有额外的自由度,因此在提高信息容量的同时,还可以进一步提高信息安全的等级.
2 三维空间OAM 全息设计与重构结果
实现二维OAM 全息的关键在于能够使得不同的OAM 态展现出不同的全息信息.因此,在传统的二维OAM 全息中,首先将目标图像与二维Dirac 梳状采样阵列相乘以获得保留OAM 模式特征的全息图.这样,在全息图像的重构过程中,结果即为目标物体的点阵图像.由离散点构成的点阵图像中的每个点都可以很好地保留入射光束所携带的OAM 态,使其不会因为彼此重叠而被破坏.此外,研究表明拓扑荷数为l的OAM 光场|+l〉 只能将拓扑荷数为-l的OAM 光场|-l〉 转换为具有实心斑点强度分布的基模高斯光束|0〉[42].如果在探测过程中,只探测点阵图像中每个点的中心位置的强度分布,即可实现全息中的OAM 模式的选择,进而使得OAM 自由度可以在全息中作为信息的载体.
为了实现三维空间OAM 全息,不仅需要将OAM 自由度用作全息中的信息载体,还需要控制重构图像在三维空间中的位置,即重构图像与OAM 全息图之间的距离 (z),这一点可基于Fresnel波带板(Fresnel zone plate,FZP)来实现.事实上,FZP 起到了透镜的作用,可以将物体的重建图像聚焦在特定平面上.该特定平面和FZP 之间的距离被定义为FZP 的“焦距” (fFZP).本文巧妙地将OAM 模式的选择技术和Fresnel 波带板技术结合使用,设计了一种可以实现三维空间OAM 全息的方法.
如图1 所示,首先将目标图像(如第1 列中显示的字母“O”,···,“A”,···,“M”)与二维Dirac 梳状采样阵列(第2 列)相乘,以获取可以保留OAM模式特征的全息图(第3 列).然后,通过将OAM态的螺旋相位(第4 列)与保留OAM 模式特征全息图相结合,生成OAM 选择性全息图(第5 列).最后,将FZP 的相位分布图(第6 列)与OAM 选择性全息图相结合,以获得用于三维空间OAM 全息的全息图(第7 列).不同的FZP 具有不同的“焦距”(fFZP),并将重建的物体全息图像聚焦在不同的平面上(第8 列).

图1 用于实现三维空间OAM 全息的全息图设计方案.通过将目标图像与二维Dirac 梳状采样阵列相乘即可获得能够保留OAM特征的全息图;然后通过在保留OAM 全息图上添加OAM 态的螺旋相位分布,生成具有OAM 特征选择性的全息图;最后,使用FZP对OAM 选择性全息图进行编码,即可获得用于三维空间OAM 全息的全息图.这里,FZP 的“焦距”( fFZP)控制着重构出的全息图像在三维空间中的位置Fig.1.Design of the holograms of three-dimensional (3D) spatial OAM holography.The OAM-preserved holograms are obtained by multiplying the target images with the two-dimensional Dirac comb sampling array.Then,the OAM-selective holograms are generated by adding a phase function of OAM modes onto the OAM-preserved hologram.3D spatial OAM-selective holograms are obtained by encoding the OAM-selective holograms with the Fresnel zone plates (FZP).The positions of the reconstructed holographic images are controlled by the focal lengths of FZP ( fFZP).
为了证明本方案的可行性,展示了一个示例.图2(a)为示例中所选用的6 个物体,“3DOAMH”.首先,基于图1 中描述的方法,获得6 个目标图像的三维空间OAM 全息图,如图2(b)所示.这里,用于编码的OAM 态分别为|1〉,|2〉,|3〉,|4〉,|5〉和|6〉,用于编码的FZP 的“焦距”分别为fFZP=100 mm,fFZP=200 mm,fFZP=300 mm,fFZP=400 mm,fFZP=500 mm和fFZP=600 mm.在图像的重构过程中,通过使用正确的解码OAM 态|-1〉,|-2〉,|-3〉,|-4〉,|-5〉和|-6〉,即可在确定的空间位置处z=100 mm,z=200 mm,z=300 mm,z=400 mm,z=500 mm和z=600 mm分别获取6 个物体的清晰的像.理论模拟结果如图2(c)所示.

图2 三维空间OAM 全息的理论模拟结果(a) 理论模拟中选用的6 个目标图像;(b) 6 个目标图像的三维空间OAM 全息图;(c)三维空间OAM 全息中,6 个图像重构的理论模拟结果.Fig.2.Simulation results of the reconstructed images of 3D spatial OAM holography: (a) The six target images;(b) holograms of 3D spatial OAM holography of six target images;(c) simulation results of reconstructed images in 3D spatial OAM holography.
实验装置如图3(a)所示.SLM-1 和SLM-2 代表两个相位型空间光调制器.一束线偏振(linear polarization,LP)入射光场照射到加载有螺旋相位全息图的SLM-1 上,用于制备想要的OAM 态光场.SLM-2 位于z=0 处,用于加载三维空间OAM 全息的全息图.由透镜L1 和L2 组成的4f系统将SLM-1 成像到SLM-2 上.当入射在SLM-2 的光场携带正确的解码OAM 态时,即可在正确的空间位置探测到物体的像.实验结果如图3(b)所示,与理论模拟的结果相一致.理论和实验验证了我们提出的三维空间OAM 全息方案的可行性.

图3 三维空间OAM 全息的实验装置及其重构结果(a) 实验装置.波长633 nm、输出功率10 mW 线偏振连续激光经过SLM-1调制后携带OAM 态;由透镜L1 和L2 组成的4f 系统将SLM-1 成像到SLM-2 上;三维空间 OAM 全息的全息图加载于SLM-2 上.携带OAM 态的光场经SLM-2 衍射后,在三维空间中重构出的目标物体的全息图像;(b) 与图2(c)中一一对应的三维空间OAM全息图像重构的实验结果Fig.3.Experiments and results of 3D spatial OAM hologram reconstruction.(a) Experimental setup.The light source is a continuous-wave laser operating at 633 nm with an output power of~10 mW.The incident light,after modulated by SLM-1,carries the desired OAM state.A 4f system consisted of lenses L1 and L2 images SLM-1 onto the SLM-2.The holographic images of objects will be reconstructed in 3D space after the light field carrying OAM state is diffracted by SLM-2.(b) The experimental results of 3D spatial OAM holographic image reconstruction,which corresponds to the simulation results in Fig.2 (c).
3 基于三维空间OAM 全息的全息复用和全息加密
基于三维空间OAM 全息,可以进一步实现三维空间OAM 全息多路复用技术.多路复用方法如图4(a)所示.三个目标图像(鸽子、松树和叶子)的OAM 选择性全息图通过图1 中描述的方法获得.在这里,用于编码的OAM 态分别为|1〉,|2〉和|3〉 .用于编码的FZP 分别为fFZP=100 mm,fFZP=200 mm和fFZP=300 mm.将这三个OAM 选择性全息图叠加在一起,即可设计出一个三维空间OAM 全息多路复用全息图.

图4 三维空间OAM 多路复用全息(a) 三维空间OAM 多路复用全息的全息图设计;(b) 三维空间OAM 多路复用全息的重构的实验结果.只有当入射光束具备正确的OAM 态,且在正确的全息图像重构平面内时,才会出现清晰的图像.这里,每一行的三个实验数据已做了归一化处理Fig.4.3D spatial OAM holographic multiplexing technology.(a) Design of the holograms for 3D spatial OAM holographic multiplexing technology.(b) The experimental results for the 3D spatial OAM holographic multiplexing technology.Only when the incident beam has the correct OAM state and is in the correct holographic image reconstruction plane,will a clear image appear.Here,the three experimental data in each row have been normalized.
在解码过程中,每个像素中都很好地保持了OAM 态的复振幅分布特性和OAM 态的正交性.因此,对于给定的OAM 态|+l〉,只能将OAM 态|-l〉转换为在给定图像平面上具有实心斑点强度分布的基模高斯光束.重构图像的实验结果如图4(b)所示.很明显,只有当入射在复用全息图上的光场为|-1〉 OAM 态,且探测平面位于z=100 mm时,鸽子的图像才能被重构出来.类似地,只有当入射在复用全息图上的光场具有|-2〉 OAM 态,且探测平面位于z=200 mm 时,松树的图像才能被重构出来;而当入射光场具有|-3〉 OAM 态,且探测平面位于z=300 mm 时,叶子的图像可以被重构出来.这些结果表明,只有使用正确的解码OAM 态,目标物体的图像才能在正确的位置平面上重构出来.由于图像平面的位置,是由三维空间OAM 全息的全息图和重构全息图像之间的距离(z)所决定,因此该距离可被作为在全息中加密信息的一个独立的自由度.
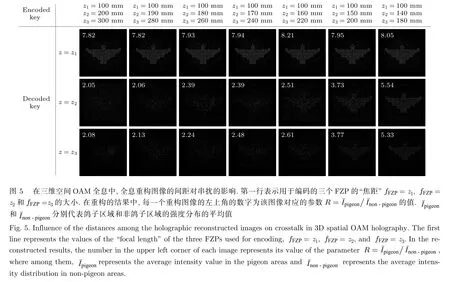
与二维OAM 全息相比,我们提出的三维空间OAM 全息技术具有一个额外的自由度(z),因此该技术可在二维OAM 全息的基础上[42],进一步提高OAM 全息的信息容量和全息加密的安全性.信息容量提高的多少取决于自由度(z)的维度的高低.研究表明,决定自由度(z)的维度高低的因素主要有两方面.一方面在于对不同维度之间的串扰的要求的高低,另一方面在于OAM 全息图的尺寸和分辨率.在后者相同的条件下,所选用的自由度(z)的维度越高,即相邻的两幅全息图像的间距越小,不同维度所携带的重构图像之间的串扰越高.以OAM 全息图的尺寸为10 mm×10 mm,分辨率为10000/mm2作为例子,在图5 进一步展示了不同重构图像间距下,重构图像之间的串扰情况.这里,三个目标图像依然是鸽子、松树和叶子,用于编码的OAM 态分别为|1〉,|2〉和|3〉,而用于编码的FZP 分别为fFZP=z1,fFZP=z2和fFZP=z3.其中(z1,z2,z3)=(100 mm,200 mm,300 mm),(100 mm,190 mm,280 mm),(100 mm,180 mm,260 mm),(100 mm,170 mm,240 mm),(100 mm,160 mm,220 mm),(100 mm,150 mm,200 mm)或(100 mm,140 mm,180 mm).在解码过程中,入射在复用全息图上的光场为|-1〉 OAM态,探测平面位于z=z1,z=z2和z=z3三种情况.为了定量地表征串扰的大小,这里引入一个参数其中代表鸽子区域的强度分布的平均值,代表非鸽子区域的强度分布的平均值.由于目标图像鸽子是加载在重构平面z1处的,所以在z1处重构出的全息图像的R越大越好;而在z2,z3处重构出的全息图像的R越大则说明串扰越大.图5 结果表明,随着编码间距的不断减小,重构图像的串扰越大,被加密的目标物体的图像越清晰,安全性越低.当Δz=50 mm 时,在z2和z3处重构出的全息图像的R分别为3.73 和3.77,目标物体鸽子的图像已清晰可见.在实际应用中,串扰需要控制在一定的范围内;因此,连续变化的自由度(z)只能选取离散的值.在要求R <3 的情况下,在1000 mm 的图像重构空间范围内,三维空间OAM 全息中,自由度z的最大维度约1000/60~16.此外,本文研究表明,OAM全息图的尺寸越大、分辨率越高,可允许的全息重构图像之间的间距越小,自由度z的最大维度越高,OAM 全息的信息容量越大、全息加密的安全性越高.
4 结论
本文通过同时利用光的OAM 自由度和重构图像所在的空间位置自由度(z)作为信息载体,实现了三维空间OAM 全息.首先,设计了使用采样阵列、OAM 态和Fresnel 波带板三者编码的三维空间OAM 全息的全息图,并从原理上证明了三维空间OAM 全息的可行性.然后,实现了三维空间OAM 多路复用全息技术.由于三维空间OAM 全息比传统的二维OAM 全息利用了额外的自由度,三维空间OAM 全息加密具有更高的信息容量和安全性.我们的工作拓展了OAM 全息的研究领域,为全息加密提供了新的途径.