基于TDOA算法的基建现场施工人员定位研究
2024-05-07朱劲磊梁均海付志超欧嘉俊
朱劲磊,梁均海,付志超,欧嘉俊,滕 俊
(1.广东电网有限责任公司广州供电局,广东 广州 510000;2.广东天广能源科技发展有限公司,广东 广州 510000)
0 引言
基建现场存在很多高危风险。根据现场施工的三维图像定位人员位置,有利于保护基建现场施工人员的生命安全[1]。对于一些危险的基建工作,其灾难发生概率高、救援难度大,严重威胁人员的生命安全和现场的财产安全。
相关学者提出了现场工作人员的跟踪定位技术。通过这一技术跟踪现场工作人员,能有效加强对现场人员的管理、避免事故发生,从而保证人身及财产安全。同时,这种定位技术对日常工作的管理也有积极作用,具有较大发展空间[2-4]。
在目前的研究中,国外对于定位技术的研究多数基于通信技术,结合全球定位系统(global positioning system,GPS)和移动通信实现有效定位。但是在复杂环境中,建筑物很容易影响信号的传递,导致定位精度不足。因此,对于影响信号传递的干扰因素仍需要深入研究。国内研究借助了大量物理测量手段(如GPS、超声波等),利用测量的不同结果(如信号强度、方向等具有的位置区分性信息),估算出定位信息[5]。文献[6]提出基于现场可编程门阵列(field programmable gate array,FPGA)的定位方法。该方法利用视觉跟踪技术扫描位置,采用以FPGA为核心的并行运行方式实现对目标的定位。该方法实时性能较好,但是定位精度不足,容易受到多径干扰和视距干扰的影响。文献[7]提出的基于面元的定位方法,以面元表达环境扫描并分割三维图像,估计出全局位姿,并通过激光雷达测量出位置信息,以实现定位。该方法并没有解决多径干扰和视距干扰的影响,依然存在定位精度不足的问题。文献[8]提出基于光栅图像识别的定位方法。该方法主要利用自动识别技术识别出图像目标,并构建光栅测试分析系统处理目标图像,以定位目标位置。但该方法并未有效解决定位过程中存在的干扰问题,在目标距离的测量上存在明显误差。
基于上述方法,本文提出基于到达时间差(time difference of arrival,TDOA)算法的基建现场施工人员定位方法。TDOA算法主要利用标签信号和时间差进行定位。这种算法对时间同步要求较低,在定位时能够降低部分干扰,以达到提高定位精度的目的。TDOA算法的应用有助于解决常见的定位方法中存在的定位误差问题。
1 三维图像定位方法设计
1.1 定位功能框架设计
基建现场多为复杂环境,危险性高。现场工作人员相对独立作业,在事故发生时人员位置不清晰。因此,基建现场施工人员高精度定位功能的开发成为迫切需求。为了实现该功能,定位功能框架的设计工作需要借助TDOA算法确定位置信息。考虑到TDOA算法的应用特点,在设计定位功能框架时,本文采用层叠样式表单(cascading style sheets,CSS)技术搭建基本框架。
三维图像定位基本框架如图1所示。
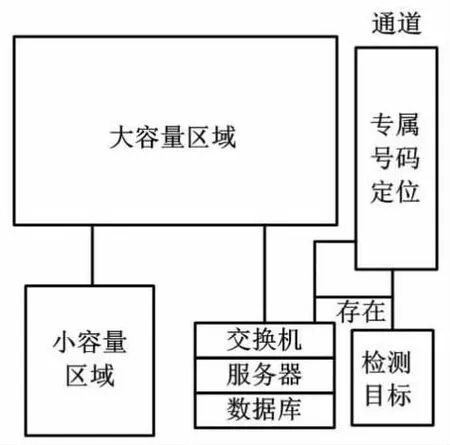
图1 三维图像定位基本框架
图1中,三维图像定位基本框架根据基建现场面积大小确定基站节点的个数,采用统一的服务器管理节点[9]。三维图像定位基本框架包括3个部分,分别是检测目标、大容量区域和小容量区域[10-11]。定位节点主要基于CSS技术设计测距模块。检测目标通过网络将三维图像传输到定位服务器与交换机中,并将三维图像存储在数据库中[12]。TDOA算法主要搭载到定位引擎中,由定位引擎计算定位结果。
定位数据库是定位服务器的重要组成部分,主要包括节点位置信息、地图信息、目标节点定位信息、施工人员信息等,因而信息量庞大[13]。定位方法在设计上根据节点的实际情况和定位区域调用数据,以完成目标位置的估算。
1.2 三维图像特征提取及匹配
本文所研究的定位方法采用特征点检测方法检测三维图像中的特征点,使用半径为12的像素集作为阈值比较像素集,并设置期望提取的目标数量为N。首先,该方法确定1个中心像素点p,并考虑点p周围16个像素灰度值。如果在范围内存在n个连续像素,则比较像素与阈值之间的大小。如果该像素比阈值大,则将该像素点作为角点记录下来。其次,该方法对角点进行排查。如果点p是1个角点,说明在此连续像素中至少存在3个大于阈值的点。如果不存在3个大于阈值的点,说明点p不是1个角点,则该方法再次对周围的像素点进行检查,并将检测标准用于剩余的待选像素。
在检测关键点后,图像块hpq可定义为:
(1)
式中:xp、yq为角点横、纵坐标;I(x,y)为像素点坐标。
像素点的灰度重心B为:
(2)
从中心到重心的特征点方向ω为:
ω=αtan2(h01,h10)
(3)
在提取到三维图像的特征点后,本文方法开始图像匹配。该方法先在前一帧的图像中确定1个特征点,并将该点周围的描述子默认为1个多维向量;再将该描述子与后一帧图像的每个描述子结合以计算距离,并按照从小到大的顺序对距离进行排列。其计算式如下。
(4)
式中:x1、x2分别为2幅图中特征点的N维向量,x1=(x11,x12,…,x1n)、x2=(x21,x22,…,x2n)。
在完成所有特征点的匹配后,本文利用TDOA算法计算目标的位置坐标。
1.3 基于TDOA算法的三维坐标计算
对于三维图像的定位,需要根据图像信息求解出至少1个基准节点和3个参考节点,才能确定三维坐标。因此,本文利用TDOA算法求解三维坐标。TDOA算法通过设置三维坐标的基准节点以建立三维坐标系。
三维定位参考点如图2所示。
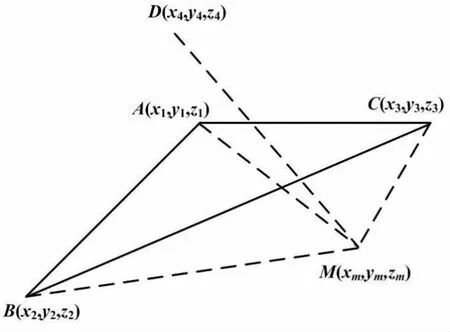
图2 三维定位参考点示意图
图2中:A点为基准节点,用于监听测距信息;B、C、D点为参考节点,根据D点位置可建立三维坐标系;M点为待测节点。本文设A点、B点、C点到M点的距离差为di,1,i=2,3。3个参考节点与待测节点之间的距离为di,i=1,2,3。由此建立目标的二维坐标方程组如式(5)~式(7)所示。

(5)
(6)
(7)
式中:Qi为参考节点与待测节点的距离。
由式(5)~式(7)可以算得B点、C点到A点、M点的距离差。

(8)

经过整理,可以得到待测目标位置的求解矩阵。
(9)
通过求解式(9),即可得到目标的二维坐标信息。对于目标的Z轴信息,本文设待测目标的Z轴坐标为zm,利用空间几何关系计算参考节点。
(10)
(11)
通过式(11)和式(12)可以得到二维坐标转换的2个解,即zm1和zm2。
(12)
将式(12)的2个解代入式(11)中,可以得到2个三维坐标值d41和d42。
(13)
根据式(11)和式(13),可以判断d4、d41和d42的关系。如果|d41-d4|<|d42-d4|,则zm取值为zm1;反之,zm取值为zm2。经过上述计算即可确定目标的三维坐标,从而实现基建现场施工人员三维图像定位。
2 算例分析
2.1 搭建试验环境
为了测试基于TDOA算法的基建现场施工人员三维图像定位方法在实际应用环境中的应用情况,本文设计仿真试验。
本文利用位置基站、小型定位标签和上位机等设备组成试验平台。基站内部包含处理器等部件,主要负责发送定位信号。标签模块与基站模块基本类似。射频收发模块作为核心模块,在试验过程中会发出试验数据信息。上位机模块包括定位服务器、控制器和显示器这3个部分。上位机主要对基站和标签模块发送的信息进行处理。考虑到在视距条件和非视距条件下产生的不同效果,试验设置2种环境,分别为室内的非视距环境和室外的视距环境。
试验环境如图3所示。
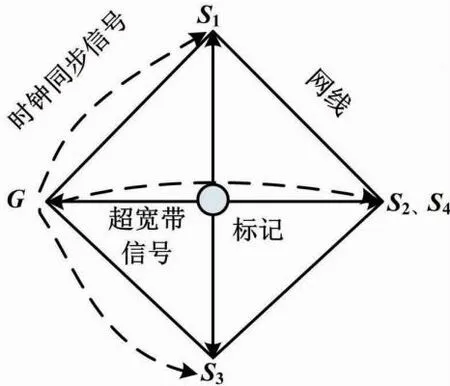
图3 试验环境示意图
图3中,G表示真实框,S1、S2、S3、S4表示侯选框。当试验过程处在理想的条件中,则忽略人员走动和器材对试验环境的影响。
实测场地平面如图4所示。
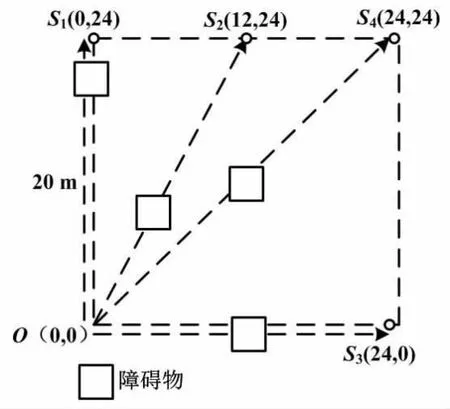
图4 实测场地平面图
图4中,原点O(即基站的高度)为1.5 m,则二维坐标为(x,y)、三维坐标为(x,y,h)。其中,h为标签(基站)高度。
试验过程中,各基站的位置信息和标签信息通过上位机向用户展示。试验人员通过上位机实时获取地址和坐标信息。
2.2 定位数据误差试验结果及分析
试验将本文方法及几种常见的定位方法(文献[6]、文献[7]、文献[8]方法)安排在试验环境中进行仿真研究。试验在仿真环境中放置5个基站,并将试验所用的标签分别放在5个已知的位置上。每个位置测试10组数据。试验计算10组位置数据相对已知坐标的平均误差,并将其作为定位坐标的绝对误差。
不同定位方法的定位误差实测结果如表1所示。由表1可知,在复杂试验环境下,本文方法的定位数据与实际位置坐标数据相差不大,绝对误差在0.2 m以内;其他几种定位方法的绝对误差较大,大部分误差在0.5 m以上。
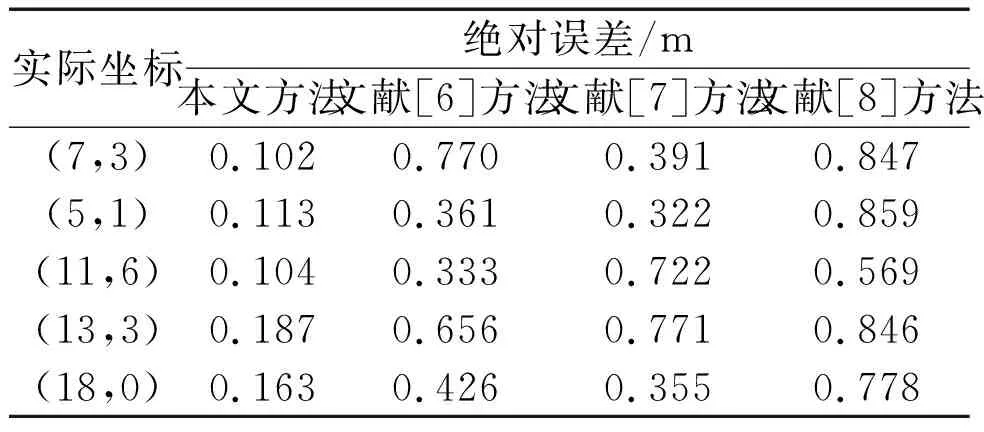
表1 不同定位方法的定位误差实测结果
2.3 连续轨迹定位试验结果及分析
本文在得到不同定位方法定位误差实测结果的基础上进行连续轨迹定位试验。本文设置信道参数为30 m,通过改变基站位置、设定工作人员行走轨迹,将不同的定位方法部署到上位机中执行,并通过计算机软件输出各定位方法的轨迹仿真结果。
不同试验环境下连续轨迹定位试验结果如图5所示。
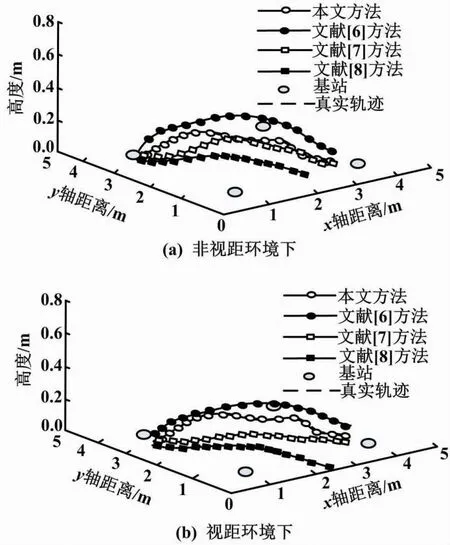
图5 不同试验环境下连续轨迹定位试验结果
由图5可知,在非视距环境下,只有本文方法能够抑制多径误差。本文方法连续定位轨迹与模拟的真实轨迹基本一致。相比之下,另外几种定位方法在多径干扰下,仍然存在比较大的定位误差。在视距环境下,试验结果与上述结果类似,只有本文方法与真实的定位轨迹一致,而其他几种定位方法并没有实现精准定位。
本文在上述结果的基础上,在0~350 s范围采集x轴方向和y轴方向的测距数据,得到不同方向上的测距误差。
各定位方法的x、y轴方向测距结果如图6所示。
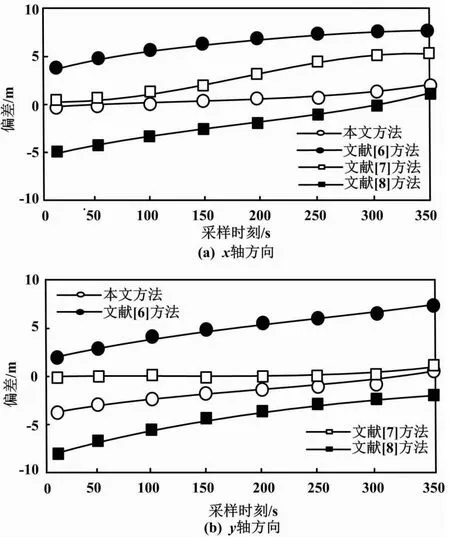
图6 各定位方法的x、y轴方向测距结果
由图6可知,在各定位方法的定位距离测试中,本文方法测得的距离与真实结果更接近。而其他几种定位方法中,文献[8]方法距离偏差最大:x轴方向上的最大测距误差达到了5 m;y轴方向上的最大测距误差达到了9 m。相比本文方法,其他几种定位方法的测距结果都存在着明显误差。这说明其他几种定位方法不能很好地抑制视距误差,测量结果不精准。
3 结论
基建现场存在大量危险因素,会导致工作人员在施工过程中存在一定的安全风险。为了保证工作人员的人身安全和高水平的工作效率,本文研究基于TDOA算法的基建现场施工人员定位方法。该方法定位精准、测距误差小、整体定位性能更加理想,能够有效削弱多径干扰,从而满足实际应用需求。
在一些特殊环境中,面对视距路径信号异常的情况,本文没有考虑衍射路径对定位效果的影响。后续研究需扩大试验范围、增加干扰条件、分析定位性能、完善定位方法。
