基于红外摄像装置的Triniti呼吸门控系统的设计和性能验证
2024-04-26刘颖王鑫徐瑶瑶袁玲潘宇龙
刘颖,王鑫,徐瑶瑶,袁玲,潘宇龙
广州医科大学附属第五医院 放疗科,广东 广州 510000
引言
随着计算机技术、医学影像技术、放射生物学及放射物理学等放疗相关学科的快速发展,放射治疗已从传统的普通放射治疗、三维适形放射治疗发展为调强放射治疗、图像引导放射治疗,充分体现了“精确放疗”的发展趋势[1]。呼吸运动是影响胸部肿瘤“精确放疗”的主要因素之一。由于呼吸中膈肌的影响,肺下叶及上腹部的移动度最大可达50 mm[2]。根据国内外的研究表明,可通过一定的技术手段测量体表的呼吸运动度,并且可将测量得到的呼吸运动度与肿瘤的运动相关联。卢晓光等[3]的研究表明,肿瘤运动与呼吸运动的周期和动度基本一致。因此,可通过患者呼吸运动规律推测肿瘤的位置,从而提高治疗的精确度。
近年来国内外研发了多种呼吸运动管理装置,如腹压带固定技术、呼吸门控技术、自主呼吸控制技术及实时跟踪治疗技术[4]。腹压带门控技术将气压带缠绕腹部一周,通过内嵌的压力传感器将腹部变化实时转换为气压变化,从而得到呼吸运动信号。此方法操作方便,但重复性较差,不适用于部分实施压腹装置的患者[5]。呼吸门控技术是放射治疗中呼吸运动管理最有效的方法之一。该方法需要在患者腹部放置荧光标记块,通过固定在CT 定位床尾部的摄像设备记录患者呼吸过程中荧光标记块的运动信号,并通过计算机将此信号转变为数字信号,从而得到患者的呼吸运动曲线[6]。根据呼吸运动的特点,设置合适的阈值触发加速器出束。呼吸门控技术对患者的肺功能有一定要求,在前期需训练患者呼吸频率,使患者的呼吸更加平稳有规律,且延长了治疗时间,同时可显著减少CT 模拟定位扫描伪影,并降低放疗中靶区的偏移程度,在临床上得到了广泛应用[6]。现已投入临床使用的呼吸门控系统包括实时位置管理(Real Position Management,RPM)系统[7]、美国瓦里安医疗系统(Varian Medical System)[8]、主动呼吸控制系统(Active Breathing Coordinator™)[9]、AZ-733V(ANZAI Medical,日本)[10]、Sentinel(C-RAD AB,瑞典) 系统[11]。
本中心配备腹压带门控的大孔径CT 和带RPM 系统的瓦里安直线加速器。由于红外摄像装置追踪的运动精度高,更便于探测患者的呼吸运动,同时支持CT 和直线加速器两端采用相同的追踪技术采集呼吸曲线从而实现门控治疗,故本中心联合广州科莱瑞迪公司开发了基于红外摄像装置的Triniti 呼吸门控系统装置替代腹压带门控设备。本研究将腹压带信号触发CT 扫描转换为红外摄像触发信号,分析2 种方式下采集的呼吸曲线和4DCT 影像的一致性,并通过Triniti 呼吸门控系统实现门控束流,最后测量呼吸门控出束及停止出束延迟时间,以测量门控治疗的精确度。
1 Triniti呼吸门控系统的设计
1.1 Triniti呼吸门控系统联通CT和直线加速器的流程设计
系统的整体运行流程如图1 所示,在CT 端通过红外摄像追踪患者呼吸运动幅度,在CT 端设置回顾式或前瞻式门控进行4DCT 扫描,在特定的呼吸相位或幅度控制CT 出束,获取特定呼吸状态的CT 影像。将呼吸运动曲线、相关的呼吸基线和门控窗的位置保存到数据库,并将重建的4DCT 影像传入治疗计划设计系统(Treatment Planning System,TPS)中。研究由医生勾画靶区,物理师设计计划,在直线加速器端设置前瞻式门控并实施治疗。治疗时,用红外摄像监测模体的呼吸运动状态,当呼吸曲线进入门控窗内时,Triniti 门控系统触发直线加速器出束,呼吸曲线离开门控窗口时,直线加速器自动停止出束。
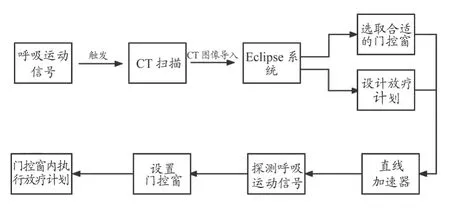
图1 Triniti系统整体的运行流程
1.2 Triniti呼吸门控系统总体构成及改造方案
本实验中使用的设备有CT(Brilliance CT Big Bore,飞利浦,荷兰)、直线加速器(Trilogy,瓦里安,美国)、TPS 系统(Eclipse,瓦里安,美国)、呼吸运动模体(008A,CIRS,美国)及呼吸门控系统(Triniti 系统,广州科莱瑞迪公司)。Triniti 系统包含将红外摄像机拍摄的呼吸运动转化为呼吸曲线的系统软件,支持呼吸曲线vxp 文件导出,方便对其进行分析。本研究呼吸门控系统通过红外摄像装置探测呼吸运动信号,并根据呼吸运动信号触发CT 扫描;然后在TPS 中分析呼吸运动规律,并选取合适的门控窗范围,在TPS 中设计放射治疗计划;最后根据选取的门控范围,设置计划执行过程中的出束窗,并由直线加速器端的Triniti 呼吸门控系统采集呼吸运动信号。当呼吸运动信号位于出束窗中时,执行放射治疗计划。
针对CT 端呼吸门控信号的改造,对CT 配置腹压带,首先实现了用Triniti 探测的呼吸运动信号触发CT 扫描,Triniti 通过红外摄像装置拍摄患者体表标记块的运动,形成呼吸运动信号文件,重建CT 影像。最后将直线加速器由RPM 系统触发改造为Triniti 呼吸门控系统触发,具体思路如图2 所示。
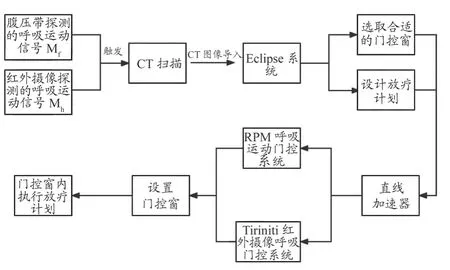
图2 改造后的呼吸门控系统流程图
2 Triniti呼吸门控系统的验证
2.1 Triniti系统与腹压带呼吸运动信号一致性验证
为验证腹压带与Triniti 系统探测到的呼吸运动信号的一致性,在研究中利用CIRS 在胸部呼吸运动模体中导入原始曲线(Mc),将Mc曲线设置为4 组:标准余弦(Cos)运动曲线,Sharkfin 运动曲线,Patient1、Patient2 真实患者的曲线驱动CIRS 模体运动。用腹压带采集记录的曲线Mf,Triniti 采集记录的运动曲线Mh,在MATLAB 软件分析Mc、Mf与Mh的一致性。
2.2 Triniti系统与腹压带采集信号重建4DCT影像一致性验证
CT 选择4DCT 扫描模式,根据呼吸运动波形,得到各时相的CT 影像,实时记录肿瘤及相应器官随呼吸运动的位移,并量化肿瘤或相应器官在三维方向上随呼吸运动的幅度。为确保Mf与Mh呼吸运动波形触发扫描的4DCT 一致性,采用同一CIRS 运动模体。利用腹压带和Triniti 的红外摄像装置记录呼吸曲线,选择相同的扫描参数,获取2 组4DCT 影像。在相同的时相选择相同的感兴趣区域(Region of Interest,ROI),利用TPS的测量工具测量同一相位上的ROI 长度。
2.3 Tiriniti在直线加速器端的改造和验证
将Triniti 系统采集到的标准正弦波驱动下CIRS 模体运动的4DCT 影像传入Eclipse 计划系统,并将呼吸周期0~25%、10%~45%的相位设为门控窗,在计划中添加kV 级摆位野验证摆位精确性[12]。将Triniti 采集的呼吸运动信号接入到瓦里安直线加速器系统中,并以设定的0~25%、10%~45%呼吸门控窗阈值作为门控触发信号控制射线的开启和关闭。将Triniti 的信号经由24pin 线缆连接原瓦里安门控控制盒,通过电频信号的形式发送到门控盒,以Triniti 信号作为门控触发信号,实现直线加速器的门控操作。
2.4 Triniti呼吸门控系统控制直线加速器出束与停止出束延迟时间测试
在直线加速器端,利用Tiniti 直线加速器治疗室内天花板上安装的双目红外相机追踪标记块的运动幅度,并将标记块的运动幅度作为患者的呼吸运动幅度。将CIRS 运动模体在治疗床上摆好,用相机采集运动模体的呼吸运动曲线。当呼吸曲线到达门控窗内,系统以电频信号形式触发门控盒,门控盒钥匙打开至Beamon 的状态,控制直线加速器出束。在机载影像系统(OBI)中选择透视模式,观察模体是否运动到阈值内,在阈值范围内时摆位野可变成绿色,控制直线加速器出束。
另外,呼吸门控治疗时间延迟是放疗临床重点关注的因素之一[13]。理论上直线加速器Beam-on 和Beamoff时间点在门控窗周期内无延迟,但由于系统信号、硬件的延迟,Beam-on 和Beam-off会延迟,从而影响放疗精度[13-14]。目前有几种方法测量门控的延迟时间,本文采用基于空间位移的方法利用相位角度来量化Beamon 和Beam-off的时间延迟,采用正弦运动方式来模拟呼吸运动[15]。
3 结果
3.1 红外摄像呼吸运动信号与RPM系统呼吸运动信号一致性验证
首先,通过MATLAB 导入波形数据,在同一坐标系上拟合3 组数据曲线,对比相位及幅度的变化,见图3。在2 组标准运动曲线和2 组真实患者呼吸曲线的驱动下,Triniti 系统采集的运动曲线与原始的曲线、腹压带采集的曲线在相位和幅度上高度重合。为再次验证二者之间的相似性,采用皮尔逊相关系数进行分析。

图3 Mc、Mf和Mh之间的标准余弦(a)、Sharkfin(b)、Patient1(c)、Patient2(d)呼吸曲线一致性
如表1 所示,通过4 组曲线数据的两两对比,皮尔逊相关系数均大于0.8(均P<0.001),表示4 组曲线数据两两对比具有线性相关,证明Mf和Mc、Mh和Mc、Mf和Mh之间4 组数据的幅度和相位高度一致,说明Triniti 系统红外摄影装置采集模体的运动信号与压腹带采集的信号一致性高。因此,可使用Triniti 系统红外摄像替代腹压带采集的信号作为呼吸门控CT 端触发信号。
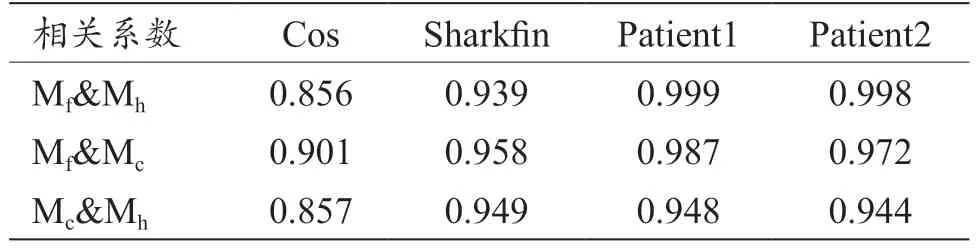
表1 Mc、Mf、Mh曲线数据之间的相关系数
3.2 两种方式下采集的4DCT图像一致性验证
在CT 扫描时选择4DCT 扫描模式,根据呼吸运动波形,得到各时相的CT 图像,实时记录肿瘤及相应器官随呼吸运动的位移,并量化肿瘤或相应器官在三维方向上随呼吸运动的幅度。为确保Mf与Mh呼吸运动波形触发扫描的4DCT 的一致性,采用同一运动模体进行扫描重建。
在相同的时相上选择相同关注的ROI,利用TPS 的测量工具进行测量,在各个相位上测量同一ROI 的长度距离,见图4。

图4 腹压带4D成像(a)和Triniti 4D成像(b)
对比观察两组4DCT 图像,由于其结构及运动差异较小,可清晰分辨出模体在升降方向做正弦周期的规律运动。表2 为根据红外摄像装置获取的呼吸运动波形重建的4DCT 图像和利用腹压带重建的4DCT 图像在各个时相内测量得到的相同扫描层下相同ROI 的测量长度,可看出相同ROI 的运动幅度差异较小,测量ROI 的幅度相差(0.065±0.069) cm,差异无统计学意义(P>0.05),说明Triniti 重建的4DCT 图像与用腹压带呼吸运动信号重建的4DCT 图像基本一致,因此Triniti 系统重建的4DCT 图像可替代压腹带的方式进行4DCT 影像扫描重建。

表2 腹压带和Triniti采集的4DCT影像在不同相位下测量相同ROI的移动距离(cm)
3.3 Triniti呼吸门控系统控制直线加速器出束与停止出束延迟时间测试
在此实验中,以5 mm 直径的锥形光栅的方式出束,用胶片记录辐射曝光长度,再用数字扫描仪扫描曝光的胶片。由于曝光的覆盖率基于射线强度进行测量,因此测量的精度主要取决于曝光带两端局部最大的曝光范围。为减小测量误差,每次重复曝光3 次。首先得到非门控全周期的曝光长度,得到CIRS 模体正弦运动下实际的胶片曝光范围。设置门控参数时,设置正弦曲线相位前瞻式门控触发束流:A(0~25%)的相位门控窗,B(10%~45%)相位门控窗,设置加速器500 MU 出束,并分别在正弦运动模体的胶片上曝光3 次,得到实际曝光长度,再利用相位周期的角度函数得到相位的角度值。
理论曝光和实际曝光长度测量数据如表3 所示。已知模体运动的正弦呼吸曲线,得出Beam-on 和Beam-off的时间分别为(0.116±0.053)s 和(0.464±0.098)s。按照AAPM TG-142 报告建议,肿瘤在以不大于20 mm/s 的速度运动时,对应的门控延迟时间应不大于100 ms[16]。相对比以往研究,例如Jin 等[17]测量RPM 系统结合直线加速器的时间延迟为(0.17±0.03)s;Smith 等[18]研究表明基于瓦里安和RPM 门控系统的时间延迟为0.07~0.10 s。由此可见,使用Triniti 的门控系统控制瓦里安直线加速器的出束时间延迟能达到与进口产品RPM 系统相当的性能。
表3 理论曝光和实际曝光长度测量数据( ±s,mm)

表3 理论曝光和实际曝光长度测量数据( ±s,mm)
项目A(0~25%)B(10%~45%)非门控理论曝光长度16.022.4-实际曝光长度119.625.731.8实际曝光长度220.225.331.9实际曝光长度320.125.932.8 x-±s19.96±0.3225.63±0.3132.16±0.55
4 讨论
呼吸门控作为一种精准放疗的临床应用技术,对胸腹部肿瘤的呼吸运动管理具有优势,可显著提升放疗计划实施精度,将射线精准投射到肿瘤上,并更好地保护肿瘤周围的正常组织,降低放疗副反应[19]。目前实现患者呼吸追踪的方式有多种,有基于红外标记探测的相机追踪,有被动呼吸控制的呼吸阀门装置,也有腹压绑带传感器的追踪方式。放疗配置的CT 要想实现4DCT 的功能,只要将扫描CT 时第三方记录的呼吸信号传给工作站重建即可[20],但是在实现前瞻性门控扫描如屏气时,需要在扫描CT 时记录患者的呼吸,包括呼吸基线、呼吸门控窗位置,以便于在直线加速器治疗时重现呼吸状态,从而保证门控治疗的重复性[21]。本系统的设计优势在于CT 端和直线加速器端同步安装了相同的相机,工作站之间建立了数据库并保存了患者数据,使得模拟定位时追踪的呼吸状态在直线加速器上能够同步实现,保证相同状态下的门控出束治疗。
对本研究综合分析可知,红外摄像装置在探测患者呼吸运动时具有一定优势,其在追踪扫描的精度和重建图像还原方面可替代压腹带门控的方式。研究通过运功模体验证了广州科莱瑞迪研发的基于红外摄像装置的Triniti 呼吸门控系统在CT 定位和直线加速器门控治疗流程中的可行性,验证了Triniti 系统在CT 定位房间通过红外双目相机采集呼吸运动信号,并将此呼吸信号与模拟CT 连接,实现模拟CT 的4DCT 功能。在直线加速器房间采集到的呼吸信号与门控盒连通,可实现门控阈值内的出束,实现精确的门控治疗。因此,将临床操作实施在同一套系统上和将门控治疗数据保存在同一数据库内对于临床操作更加集中且简单。另外,通过扫描CIRS 模体,患者4DCT 的图像可明显显示呼吸运动对肿瘤的位置影响。对胸腹部进行模拟定位扫描时可选择4DCT 来确定肿瘤运动范围,或选择深吸气屏气、深呼气屏气的方式来降低呼吸运动对肿瘤放疗带来的影响,从而精确实施肺癌或乳腺癌等的放射治疗,将靶区剂量推高的同时更好地保护危及器官,达到精准门控放疗的目的[22]。
在应用呼吸门控过程中,研究发现,有规律的呼吸运动波形可提高门控效率,而人体的自由呼吸规律性不一致,尤其是对于心肺功能较差的患者,其呼吸运动规律性较差。在前瞻式呼吸门控中,需要患者主动配合,有意识地进行有规律的呼吸,例如进行4DCT 门控时尽可能规律地自由呼吸。屏气门控要求患者长时间憋气,因此在实施门控前期,对患者进行呼吸训练尤为重要,后期设计可以考虑在呼吸门控系统中增加呼吸训练模块,在扫描或治疗前,通过训练模块提高患者呼吸的重复性和稳定性,从而提高门控治疗的效率。
