一种基于变参考电平的零点凹口双重可控方向图综合改进方法
2024-04-24刘海波韩宇新武兴恺陈广茂
刘海波,韩宇新,武兴恺,陈广茂
(1.北京理工大学 信息与电子学院, 北京 100081;2.北京理工大学 信息与电子学院国家重点实验室电磁感知研究中心, 北京 100081)
近几十年以来,相控阵雷达由于其先进的性能而被广泛应用[1-3],相控阵天线方向图综合是阵列信号处理的热点研究问题[4-6].常见的方向图综合方法主要分为3 类:基于凸优化理论的方向图综合算法、基于加权最小二乘的方向图综合算法和基于自适应阵理论的方向图综合算法,基于凸优化理论的方向图综合算法能得到的权值向量的最优解,但需要将方向图综合问题转化为凸问题;基于加权最小二乘的方向图综合算法通过调整最小二乘代价函数实现,调整中需要对不同参数通过试凑法选取,无法保证阵列响应满足期望条件;基于自适应阵理论的方向图综合算法,依据最大信噪比准则迭代求解权值向量,能够实现任意阵型的方向图综合.1990 年,OLEN 等[7]首次系统地将自适应波束形成原理运用于阵列的方向图综合,该算法假设干扰位于方向图低副瓣区域所对应的空间方向,并基于最大信噪比准则实现了方向图的低副瓣,且算法收敛后形成的方向图具有等副瓣特性.1999 年在Olen-Compton算法基础上,提出一种能够在实现等副瓣的同时控制波束的主瓣形状的波束方向图综合方法[8].2003 年,刁跃龙[9]对该算法的迭代公式进行了修改,降低了迭代次数缩短了算法收敛所需时间.此外,还引入了变参考电平的概念,基于变参考电平该算法不仅能使方向图在固定主瓣宽度下达到最低的等副瓣电平,还能同时产生宽度和深度可控的凹口.2014 年将该算法应用于MTD 滤波器的设计[10],2018 年基于Olen-Compton 算法解决了恒定响应宽带波束形成问题[11].
本文在Olen-Compton 算法基础上,通过对可变参考电平进行修改,得到了一种新的波束方向图综合算法,新算法能够在共形阵方向图主瓣宽度一定的前提下,同时实现方向图的等低副瓣、可控凹口和可控零点,从而使波束能灵活地对抗杂波和干扰.与最新的等低副瓣方向图综合算法相比[12-14],本文所提算法能够保持方向图凹口电平相等,且加入零点和凹口后,对其他区域的副瓣电平影响较小,最后通过计算机仿真验证了算法的有效性.
1 算法模型
1.1 基于自适应波束形成的方向图综合方法简述
阵列天线的方向图综合问题就是在阵元位置、阵元数量和单元方向图已知的前提下,通过某种方法来找到一组复数权值w,该权值能使方向图B(θ)在期望波束指向处具有最高的增益,且旁瓣电平满足某些特定的要求.
阵列天线的方向图函数可以表示为
式中:v(θ)和w分别代表阵列的导向矢量和复权值;H 代表Hermite 转置.导向矢量v(θ)可表示为
式中: θi表示来波方向也是期望波束指向;N表示阵元个数;gi(θ) 表示第i个阵元的单元方向图;T 表示矩阵转置; φi(θ)为电磁波在空间中传播时,由于波程差导致的第i个阵元的相位延迟,即φi(θ) =kxi,其中k表示波数,xi表示阵列中的第i个阵元在空间中的坐标位置.
在阵列天线方向图的综合问题中,运用最大信噪比(MSNR)准则进行波束形成,就是寻找一组复权值,该权值能使阵列天线的方向图在波束指向的方向获得的增益尽可能大,而干扰方向阵列增益尽量小,从而使得阵列的输出满足信干噪比(SINR)最大[9].
阵列的输入可以表示为
式中:xs表示期望信号;xn表示天线单元本身包含的噪声;xf表示干扰信号.将非期望信号合并,有
式(4)中,xu表示无用信号.根据自适应阵原理,在MSNR 准则下,最优权矢量表示为
式中: μ为一个大于0 的常数;q为的最大特征值所对应的特征向量,而Rs和Ru分别为无用信号和期望信号的自相关矩阵,其数学表达式为
当期望信号只来自一个方向时,式(5)可表示为
式中vs为所期望波束指向的导向矢量.
假设存在一个期望信号和一个干扰信号,它们同时入射到阵列上,其来波方向分别记为 θs和 θf,信号振幅记为As和Af,初相记为 φs和 φf,角频率分别为ω1和 ω2,则这两个信号可表示为
式中vs和vf分别为期望信号和干扰信号的导向矢量.根据式(6)和(7),有
设噪声矢量xn可表示为
式中ni(t)为第i个阵元的噪声,i=1,2,...,N.设噪声功率均为 σ2且相互独立,则噪声的自相关矩阵为
假设信号,噪声和干扰均满足两两独立分布[7],则有
令s=,f=,则信噪比和干噪比可写为
为讨论简便,不妨设σ2=1,则RSN=s,RIN=f.因此,期望信号和无用信号的自相关矩阵[9]可表示为
此时便可以利用Rs和Rf来确定MSNR 准则下阵列的最优权矢量wsopt.
Olen-Compton 算法的核心主要基于以下表达式
式(20)和(21)所描述的也是MSNR 准则下的最优权适量求解问题,只不过将干扰信号由一个变为多个的同时,式(19)也就相应地变为式(21).根据式(17),fi既能表示第i个干扰信号,也表示其干噪比.vfi表示其导向矢量,Vf和F分别可表示为
现在简述Olen-Compton 算法的内容.首先根据式(2)来确定期望信号的导向矢量.然后确定一个期望的副瓣参考电平,若要求其比主瓣峰值低D(θ)dB,则期望副瓣电平d(θ)(线性值)可换算为
式中,Vpeak表示方向图p(θ)的峰值电平,p(θ)可由式(1)确定.
假设m个干扰一次性地入射到方向图的副瓣区域,这些干扰的入射角分别记为θfi(i=1,2,...,m),接着对fi赋初值,为了方便计算,可将其直接取1.然后,在 θfi处对当前方向图的电平和期望方向图的电平进行做差比较,若差值大于0,则表明此处干扰功率不足,需要增大当前位置的干扰功率,若差值小于0,则需要减小当前位置的干扰功率.随着干扰功率在不断调整,阵列天线方向图的副瓣电平也在不断下降,因此主瓣宽度也在不断展宽.因此,在每次迭代时,务必要保证当前方向图的主瓣区域内干扰功率为0.由于每次迭代后,方向图的峰值电平会发生变化,这里将式(24)进行修正,使其为迭代次数k和角度 θ的函数,即
式中Vpeak(k)表示第k次迭代时方向图p(θ,k)的最大峰值电平.
Olen 算法的干扰功率迭代公式为[9]
式中:(θLeft(k),θRight(k))表示方向图主瓣区,该区域内干扰功率被置0;fi(k)表示第k次迭代时 θi方向的干扰功率;K为迭代系数,K>0 ; Δ(θfi,k)表示第k次迭代后在 θfi方向上当前方向图的电平值与期望方向图的电平值之差,用公式表示为
这里再次强调:由于干扰功率在随着迭代不断变化,导致基于MSNR 准则的波束形成器的最优权值也变化.因此,方向图的主瓣区也在随之改变.因此,每次迭代后务必要重新确定主瓣区域.
Olen-Compton 算法存在的问题是:算法收敛速度太慢,一般需要上百次才能收敛,且K值的选取不具有通用性,而K值的大小又和算法的收敛性和稳定性密切相关,因此每次实验只能通过“累尝法”来寻找合适的K[9].
刁跃龙[9]在对式(26)所述的迭代公式进行详细分析后,将迭代公式修改为
由于式(28)考虑了干扰间的相对大小并对电平差Δ(θfi,k)进行了归一化处理,因此算法的收敛速度大幅加快,且K值易于选取(一般为1 或者0.1).自此,该算法收敛速度问题和系数选取问题在一定程度上被解决.
但Olen-Compton 算法所解决的问题是在固定波束指向和主副瓣电平差的前提下的任意阵列方向图综合问题,但这种规定可能是无解的,且得到的方向图也不再具有等副瓣特性.例如:希望在波束指向为θs时得到旁瓣峰值电平比主瓣低LdB 的均匀副瓣方向图,但如果L的值较大时,无论算法迭代多少次,都无法得到期望的方向图,而只能得到较为令人满意的方向图,且得到的方向图其实是根据最小均方误差获得的一个模糊的解,而且在这种情况下方向图的副瓣不一定是均匀的[9].
事实上,在进行阵列天线的方向图综合时,由于波束宽度与测角精度息息相关,往往更加关心这样一个问题:在波束的指向和主瓣宽度都确定的前提下,如何获得最低的均匀副瓣方向图.为解决该问题,刁跃龙[9]提出变参考电平的概念,即将式(25)修改为
并且在每次迭代前,均对集合d进行搜寻.这种峰值搜索对于现代计算机仿真软件来说是很容易完成的.
引入变参考电平后,随着迭代不断进行,高的副瓣总是试图与最低副瓣趋于同一水平,而参考电平d又是旁瓣区域内最低的峰值电平,因此当所有的副瓣峰值与d趋于一致时,即可得到均匀等副瓣的方向图.
引入变参考电平后的算法步骤可以描述为[9]:
(1) 确定期望波束指向 θs,并利用式(2)求出其导向矢量;
(2) 根据预设的主瓣宽度和波束指向,确定主瓣区域(θLeft,θRight)(θLeft,θRight);
(3) 在主瓣区以外的副瓣区引入大量的虚拟干扰,并对其赋初始功率(为方便操作,可直接令所有干扰的功率初值为1);
(4) 根据式(11)和(12),求出期望信号和无用信号的自相关矩阵,并根据MSNR 准则计算在当前迭代次数k下的最优权值,然后利用式(1)求出阵列的方向图p(θ,k);
(5) 根据式(29)计算当前的参考电平d(θ,k) ,并确定当前方向图的电平与期望方向图的电平差Δ(θ,k);
(6) 根据式(28)所述的迭代公式更新下次迭代时的干扰功率,这里要注意的是,在引入变参考电平后,主瓣区是被固定的,因此不需要重新搜索主瓣区范围;
(7) 重复步骤(4)~(6),直至迭代次数达到预设上限或满足以下表达式
式中 δ为所能容忍的最大副瓣峰值电平差.此时,MSNR 准则下求得的权值wsopt即为满足公式(30)限制的权矢量.根据式(5)中最大信噪比准则的最优权矢量表达式,μwsopt就是所求的最优权矢量,这里的μ值可以根据阵列的峰值增益需求来确定.
刁跃龙[9]在提出变参考电平概念后,还对其进行了一定程度的应用扩展.如为了对抗干扰,往往希望阵列天线的方向图能够在某些方向形成凹口区.针对这个问题,刁跃龙将式(29)所述的变参考电平修改为
而此时d1(θ,k)的选择与式(27)所述不同,此时修改为
式中L0表示凹口深度与等副瓣电平的电平差,dB.
通过这样设置变参考电平,收敛后的的方向图不仅能保持等副瓣特性,还能够在指定的区域产生凹口,且凹口深度可控.
1.2 算法改进
实际情况中,在抗杂波和干扰时会存在以下几种需求:
(1) 方向图在一个或多个固定的区域形成宽度和深度可控的凹口;
(2) 方向图只在某个或某几个固定的角度形成深度可控的零点,而不形成具有一定宽度的凹口;
(3) 方向图在某个或某几个固定区域形成宽度和深度可控的凹口,同时在某几个固定的角度形成深度可控的零点.
对于需求(1),采用式(32)所述的可变参考电平即可实现.而对于需求(2)和需求(3),由于式(32)的搜索方法为对指定的副瓣区进行最低旁瓣峰值搜索,而零点位置只是一个或几个固定的点,因此不存在副瓣峰值,参考电平在这些位置的峰值搜索结果一定是空的.为实现零点控制,将变参考电平修改为
其中
如此,便可以在指定位置产生深度可控的零点.以上方法也适用于同时产生多个深度不同的零点,只需在式(33)中对多个零点进行分别控制即可.下面以两个零点为例,给出变参考点的定义公式
式中,零点1 和零点2 的零点深度比收敛后的正常副瓣电平分别低L1和L2,dB.此时d1(θ,k)修改为
对于需求(3),可以考虑将变参考电平修改为
此时d1(θ,k)与式(32)相同,为凹口区的最低峰值电平.同样地,也可以按照式(35)中对参考电平的修改方式来修改式(37),以此同时控制多个凹口和多个零点.
2 仿真验证
圆弧阵是极具代表性的共形阵[11],本节以均匀圆弧阵为示例对本文所述算法进行仿真验证,完整的66 元均匀圆环阵(UCA)布阵示意方式如图1所示.
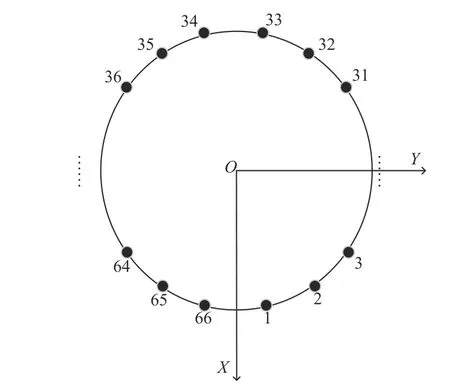
图1 均匀圆环阵列阵元排布示意图Fig.1 Schematic diagram of uniform circular array element layout
取图1 所示圆环阵相邻的22 个阵元(56~11 号阵元)为均匀圆弧阵.对圆弧阵进行仿真实验,具体参数见表1,算法收敛条件取式(30),阵列的单元方向图取

表1 圆弧阵仿真参数Tab.1 Simulation parameters of arc array
式中 φm为以O为圆心,第m个阵元与X轴的夹角.
2.1 凹口控制
选择参考电平如式(31)所述,可以实现固定主瓣宽度下最低等副瓣方向图的同时控制波束的零陷宽度和深度.如要求1:在波束指向为0°时形成等副瓣波束,波束宽度限制为20°,且在30°~50°处产生比副瓣电平低30 dB 的凹口;要求2:在波束指向为10°时形成等副瓣波束,波束宽度限制为20°,且在-45°~-35°和35°~50°处产生比副瓣电平分别低20 dB 和30 dB 的凹口.采用表1 所述的圆环阵进行仿真,凹口控制结果如图2 所示.

图2 凹口控制结果Fig.2 The results of gaps controlling
图2 的仿真结果表明,方向图在均匀低副瓣的同时能将主瓣宽度保持在20°,而且在指定位置产生了期望宽度和深度的凹口.
2.2 零点控制
选择参考电平如式(33)所述,可以实现固定主瓣宽度下最低等副瓣方向图的同时控制波束的零点位置和深度.如要求3:在波束指向为0°时形成等副瓣波束,波束宽度限制为20°,且在-60°,-40°,50°和70°处产生比副瓣电平低40 dB 的零点;要求4:在波束指向为20°时形成等副瓣波束,波束宽度限制为20°,且在-85°、-50°、30°和60°处产生比副瓣电平分别低40 dB、40 dB、50 dB 和30 dB 的零点.采用表1所述的圆环阵进行仿真,凹口控制结果如图3 所示.

图3 零点控制结果Fig.3 The results of nulls controlling
根据图3 的仿真结果可知,方向图在均匀低副瓣的同时能将主瓣宽度保持在20°,而且在指定位置产生了期望深度的零点.
2.3 凹口与零点同时控制
选择参考电平如式(37)所述,可以实现固定主瓣宽度下最低等副瓣方向图的同时控制波束的零点和凹口.如要求5:在波束指向为-25°时形成等副瓣波束,波束宽度限制为20°,在-60°处产生比副瓣电平低40 dB 的零点,且在35°~50°处产生比副瓣低30 dB的凹口;要求6:在波束指向为0°时形成等副瓣波束,波束宽度限制为20°,且在-60°~-35°和40°处产生比副瓣电平分别低30 dB 和40 dB 的凹口和零点.采用表1 所述的圆环阵进行仿真,凹口控制结果如图4所示.

图4 凹口和零点同时控制的结果Fig.4 The results of nulls and gaps controlling simultaneously
通过图4 可知,方向图在均匀低副瓣的同时能将主瓣宽度保持在20°,而且在指定位置产生了期望深度的零点与期望宽度和深度的凹口.
3 结 论
本文对已有的基于自适应阵原理的低副瓣方向图综合方法进行了改进.相比于原算法,新算法能够实现波束在固定主瓣宽度下同时具备等低副瓣、可控深度和宽度的凹口与可控深度的零点,这对于相控阵雷达对抗杂波和干扰有一定的实用价值.