穿戴武器臂的人枪耦合系统发射响应研究
2024-04-24何龙姜荃李鹏杰徐诚
何龙,姜荃,李鹏杰,徐诚
(1.南京理工大学 机械工程学院自动武器系,江苏,南京 210094;2.中国船舶集团有限公司 第705 研究所昆明分部,云南,昆明 650032;3.中国兵器工业第208 研究所,北京 102202)
穿戴式武器臂是一种新型单兵上肢外骨骼,是未来超级士兵的主要组成部分,对提高单兵火力打击效能具有重要作用,近年来受到了世界各国轻武器学者的关注,开展穿戴武器臂的人枪耦合系统发射动态响应问题研究对未来研发和应用穿戴式武器臂具有重要意义.
穿戴式武器臂的概念来源于可穿戴式外肢体机械臂,目前可穿戴外肢体机械臂主要应用于工业制造和康复领域,大部分产品还处在试验验证阶段[1-3].美国麻省理工学院与波音公司的相关技术人员合作开发的可穿戴式外肢体机器人 (supernumerary robotic limbs, SRL)[4-7],用于辅助飞机装配工人的工作.有效避免工人长时间工作造成的双手疲劳,提高了工作效率和工作质量.可穿戴外肢体机械臂的轻量化和舒适化一直是人们研究的目标[8-9].引入可穿戴式外肢体机械臂概念辅助射手射击,就是穿戴式武器臂.美国陆军研究实验室目前正在开发和测试一种可穿戴式武器臂,名为“第三只手武器挂载系统”[10],该武器臂是一种能够为单兵武器射击时提供支撑,减轻穿戴者手臂的负重,降低士兵疲劳,提高射击稳定性.国内兵器工业208 所和南京理工大学[11]也进行了穿戴式武器臂研究,完成了原理样机的研制,并演示了其辅助射击功效.但仍缺乏对其人枪系统作用工作机制的认识和设计理论方法.
人枪系统相互作用发射动态响应对士兵作战效能有重要影响,一直是轻武器行业学术研究的基础科学问题,已经开展了大量研究工作,典型的有:针对立姿无依托人枪系统,李永新等[12]建立了4 刚度8 自由度动力学简化模型,预测了发射响应;王亚平等[13]建立了12 刚度32 自由度仿真模型,进一步分析了发射过程中人体关键部位的动力冲击情况;包建东等[14]进一步分析和识别了立姿无依托人枪系统模型参数,改进了人枪系统简化模型.王缘等[15]建立了立姿无依托人枪系统逆向动力学模型,更细致描述了射击过程骨骼肌肉力学行为。
目前国内外进一步开发穿戴式武器臂仍需要解决人机耦合相互作用分析方法和穿戴式武器臂辅助射击试验评估等问题,但目前国内外人枪系统及其相互作用分析模型研究主要集中在无穿戴武器臂的常规射击状态[12-15],对穿戴式武器臂人枪系统的定量测量、建模仿真和作用机理等研究仍属空白,急需对穿戴式武器臂人枪系统发射响应进行定量分析与研究.
本文提出了一种穿戴式武器臂总体结构方案,重点研究穿戴式武器臂辅助射击人机耦合发射响应问题,目的是为未来穿戴式武器臂设计与开发提供技术支撑.
1 穿戴式武器臂结构方案
穿戴式武器臂总体结构及机构简图分别如图1和图2 所示,本文设计的穿戴式武器臂由侧臂组件、上臂组件、武器挂载臂、穿戴接口等组成,侧臂组件由两个连接臂通过绞链连接,可提供2 个转动自由度,在士兵穿戴持枪时,协助士兵握持枪械,铰接的各个臂提供给挂载枪械一定的操作自由度,在承受枪械质量和发射冲击的同时,把对士兵干涉降到最低.上臂组件由两个长臂、两个短臂组件组成,通过绞链连结,形成平形四边形框架结构,整个上臂组件可以作仰俯运动,上臂组件利用了平行四边形对边平行关系不变的特性,在连杆机构连续转动过程中使得末端保持某种姿态不变,从而达到末端稳定的效果.沿平行四边形框架的对角线添加弹性元件,用以阻止四边形的变形趋势,约束四边形的变形量,让武器臂对挂载的枪械有一个弹性支撑,实现可穿戴武器臂装置在承托枪械质量的情况下,使穿戴者可以操控枪械做出一系列的动作.武器挂载臂与上臂组件刚性连接,用于挂载枪械,在其上端有武器挂载接口,该接口设计成具备双向缓冲器功能的皮卡汀尼导轨挂载接口.武器臂穿戴接口设计成防弹插板的形状,直接插入防弹背心中,可穿脱便捷,同时无需对防弹背心做任何改动,实现了武器臂与现有单兵装备有机的结合,避免了单独设计穿戴装具,有着较好的适用性.

图1 穿戴式武器臂总体结构方案Fig.1 The overall structure scheme of the wearable weapon arm
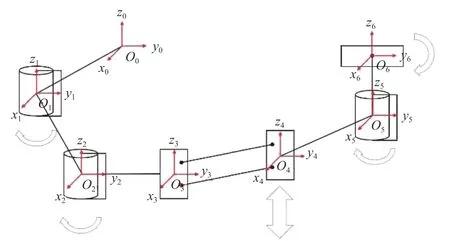
图2 穿戴式武器臂机构简图Fig.2 The mechanism diagram of the wearable weapon arm
穿戴式武器臂设计目的是承载枪械的主要质量,将枪械的质量和发射冲击载荷分散到人体躯干,有效减轻穿戴者的双手负担.使得穿戴者处于立姿无依托的射击状态下,增加穿戴者持枪的动态稳定性,提高枪械的射击精度.
2 穿戴武器臂的人枪系统实验研究
2.1 武器臂辅助持枪实验
本文研制了穿戴式武器臂实验样机(如图3 和4所示),并选择3 名有一定射击经验的男性射手作为受测试对象,在有/无穿戴武器臂状态下进行了持枪瞄准实验.射手身高(175±10)cm、年龄(25±3)岁、体重(75±10)kg,所有受试者均身体健康,被测试肌肉无不良症状.

图3 穿戴式武器臂与人体耦合示意图Fig.3 Human-gun system with wearing weapon arm

图4 穿戴式武器臂样机Fig.4 A prototype of the wearable weapon arm
采用16 通道Delsys 表面肌电测试系统采集射手左右臂和躯干肌肉的表面肌电信号,对比分析射手在有/无穿戴武器臂状态下举枪瞄准时相关肌肉参与动作的激活程度和疲劳情况.如图5 所示,射手每条手臂采集的部位分别为斜方肌、三角肌、肱三头肌、肱二头肌、肱桡肌、肱侧腕屈肌、背阔肌,采样频率为2 kHz.

图5 射手表面肌电测量Fig.5 Measuring surface electromyography on the shooter
受试者在有/无穿戴武器臂状态下立姿据枪瞄准100 s 后,对表面肌电测试系统采集的数据进行分析处理.一位典型受试者实验结果如图6~8 所示.

图6 左手积分肌电值对比Fig.6 Left hand integral EMG value comparison
图6 是一位典型受试者左手肌肉的积分肌电值柱状图对比情况,在武器臂的辅助下,左手肌肉的积分肌电值除三角肌外均有明显的下降,肱二头肌的下降尤为显著,相比较下降了62%,说明此部分肌肉发力托举枪械动作的激活程度明显降低,因此可知武器臂对枪械的支撑作用比较明显.
图7 是右手肌肉的积分肌电值柱状图对比情况,在武器臂辅助持枪状态下右手肌肉的积分肌电值相比较正常立姿持枪时有所下降,但下降幅度不明显,主要原因是右手握持的部分不承担枪械的主要质量,肱二头肌的激活程度也较低.
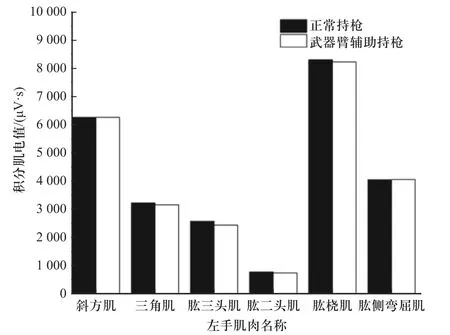
图7 右手积分肌电值对比Fig.7 Right hand integral EMG value comparison
图8 是该位受试者躯干肌肉积分肌电值对比图,可以看出人体在穿戴上武器臂后,对躯干主要肌肉产生的影响较小,肌肉参与活动的激活度与正常立姿持枪时基本保持一致,武器臂对躯干肌肉产生的负担不大.
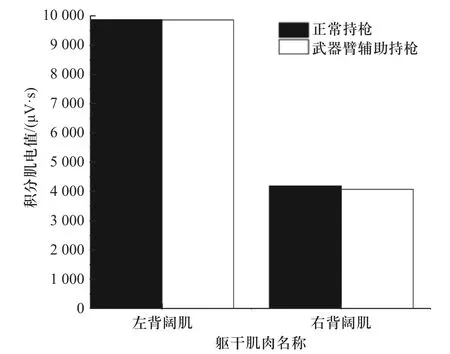
图8 躯干肌肉积分肌电值对比Fig.8 Body integral EMG value comparison
其他受试者的试验结果与图6~8 类似,通过数据一致性检验,可知3 位受试者的肌电特性具有较好的一致性(假设检验中的P<0.01),穿戴武器臂左手肱二头肌的下降尤为显著,武器臂对枪械的支撑作用比较明显.
2.2 穿戴武器臂的人枪系统发射响应实验
本文采用Codamotion 三维运动捕捉系统采集连发和单发射击过程中枪口运动数据,对比分析了射手在有/无穿戴武器臂状态下射击的动态响应,采样频率为200 Hz,测量标识点位置误差在0.05 mm 内.
2.2.1 三发点射响应实验结果
图9~11 是实验获得的射手在有/无穿戴武器臂辅助下持枪射击过程中枪口的运动位移曲线.
图9 和图10 中,射手在有/无穿戴武器臂辅助下,枪口在后坐方向的位移分别为43 mm、 74 mm,枪口在竖直方向的位移分别为25.3 mm、42.1 mm;射手在武器臂的辅助下连发射击时枪口后坐和竖直方向的位移量相比较正常持枪射击状态分别下降了41%、40%,这是因为武器臂的一端与枪身连接,在竖直方向对枪械有支撑作用,使得枪口在后坐、竖直方向的运动得到了有效抑制,射击也更加地稳定.
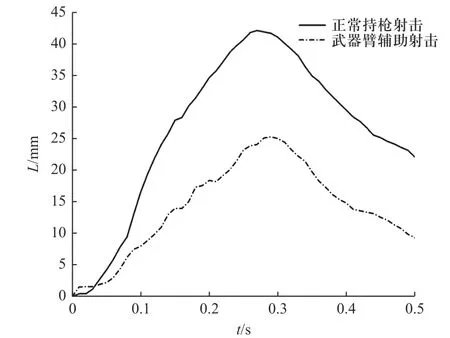
图10 连发枪口竖直位移曲线对比Fig.10 Comparison of vertical displacement curves of burst muzzle
图11 中,射手在有/无穿戴武器臂辅助下,枪口在水平方向的位移分别为21 mm、22.5 mm,射手有穿戴武器臂辅助状态下射击的枪口水平位移增加了7%.原因是武器臂与枪身连接改变了原来枪械重心的位置,使得枪械重心在水平方向上没有与枪管轴线重合,而武器臂在水平方向对枪械没有起到支撑作用,从而增加了枪口在水平方向的位移.由于点射过程枪口竖直位移对射弹散布影响最大,故尽管射击时枪口水平位移增大,但有穿戴武器臂射击综合性能比无武器臂状态要好.

图11 连发枪口水平位移曲线对比Fig.11 Comparison of horizontal displacement curves of burst muzzle
表1 是3 位不同射手穿戴武器臂时三发点射枪口垂直位移试验结果,与不戴武器臂相比,枪口跳动都大幅下降.在10 m 射距,测量三发点射散布,以首发弹着点为基准点,包括第一、二、三发弹着点的三发点射散布R100 值见表2,3 个射手穿戴武器臂辅助下R100 平均值从34.67 cm 减小到26.55 cm,减小了23.4%.
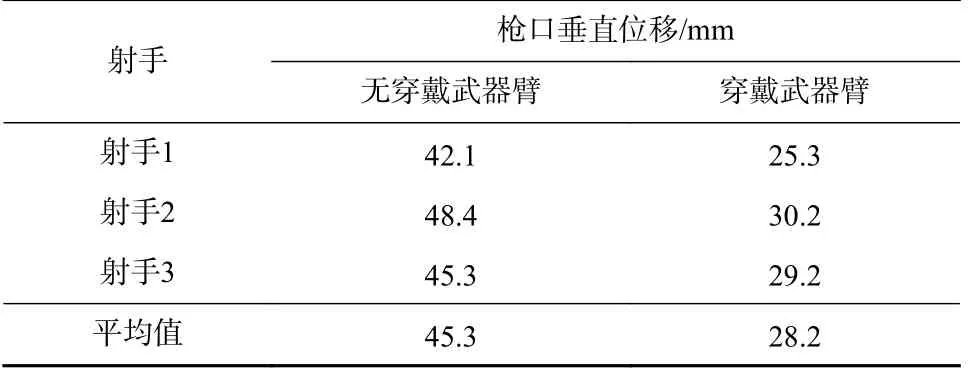
表1 3 位射手的枪口垂直位移Tab.1 Muzzle vertical displacement of three-shooter
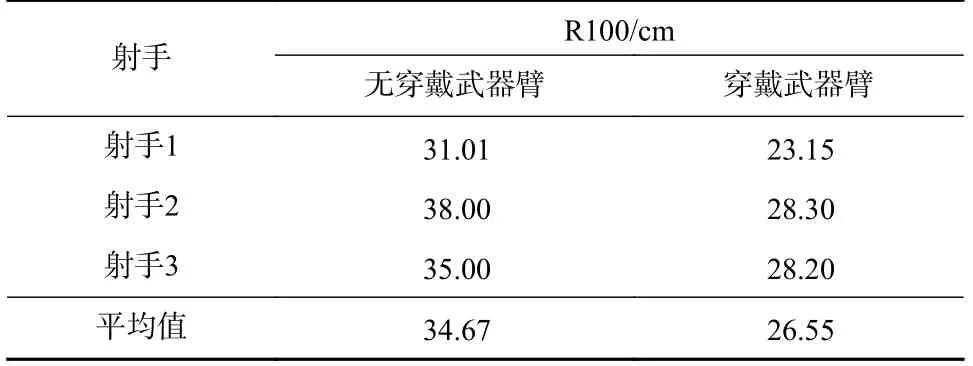
表2 三发点射散布R100(10 m 射距)Tab.2 Three-shot point-fire dispersion R100 (10 m shoot distance)
2.2.2 单发射击响应实验结果
为分析射手有/无穿戴武器臂射击响应恢复情况,本文专门进行了单发射击枪口响应测量,实验获得的两种持枪射击状态下单发枪口运动位移曲线如图12~图14 所示.
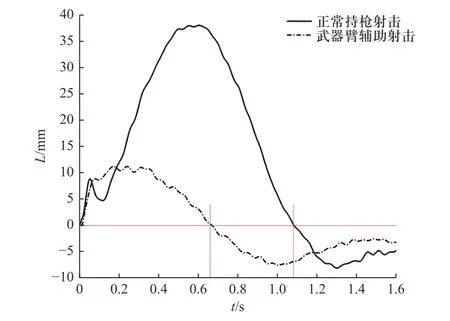
图12 单发枪口后坐恢复对比图Fig.12 Comparison of single-shot recoil recovery

图13 单发枪口上跳恢复对比Fig.13 Comparison of single-shot muzzle jump recovery

图14 单发枪口横跳恢复对比Fig.14 Comparison of single-shot muzzle horizontal jump recovery
将“击发后枪口第一次回复至原瞄准点位置(L=0 位置)需要的时间”定义为“枪口跳动恢复用时”,由以上的曲线对比图可以看出,枪械击发后射手迅速将枪口回复至原瞄准点位置,相比较正常持枪射击情况,射手在武器臂的辅助下将枪口恢复到原点的用时更短,同时枪口在3 个方向的位移量也明显下降,射手的射击稳定性得到显著提升.
表3 是3 个射手有/无穿戴武器臂枪口跳动恢复用时平均值,不同射手穿戴武器臂在不同方向上的恢复用时平均值也明显下降.
表3 枪口跳动恢复用时对比(3 个射手平均值)Tab.3 Comparison of gun muzzle bounce recovery time
通过上述试验数据的对比分析可以得到以下结论:穿戴武器臂有助于提高枪口恢复速度,减小枪口上跳的位移量,减小枪械射击的垂直散布,提高射手的射击稳定性和点射射击精度.试验结果和仿真结果皆证明武器臂能够实现穿戴者持枪稳定射击的功能,验证了穿戴式武器臂方案设计的可行性.
3 穿戴武器臂的人枪系统建模与计算分析
3.1 有无穿戴武器臂立姿无依托人枪相互作用仿真模型
为了在设计阶段分析穿戴武器臂的射击性能,本文采用ADAMS 仿真平台分别建立了人体立姿无依托人枪相互作用仿真模型和人体穿戴武器臂持枪人枪相互作用仿真模型,进行了人体穿戴武器臂持枪射击与射手正常持枪射击状态对比分析,为穿戴武器臂提供了基本设计分析方法.建模时基本假设如下:
(1)根据人体响应研究,人体肌肉对外界刺激响应时间需要约300 ms,仅考虑3 发点射300 ms 内响应,假设人体肌肉无主动响应控制动作,人体看作被动的多体系统模型,忽略人体自身的生物活动的影响,如生物体正常生理活动所产生的微小晃动等.
(2)由于人体的骨头十分坚硬,在运动和受力过程中不考虑骨头的变形,因此将其视为刚体;各关节间使用球铰接副连接,施加弹簧和阻尼约束关节的相对自由度,同时调整弹簧系统参数模拟骨骼肌肉的作用力.
(3)采用弹簧模拟背带绳将武器臂的战术插板与人体连接;武器臂辅助射击时人体模型的持枪姿势保持不变,武器臂的活动部件按照设计方案中的运动关系设置与之对应的运动副,通过调整武器臂的活动部件适应持枪姿势.
(4)不考虑枪械和武器臂零部件的装配间隙,枪械发射作用载荷主要考虑膛底第一冲量、自动机后坐到位碰撞第二冲量等.
以一个身高175 cm、质量65 kg 标准的男性人体和M4 突击步枪为对象在ADAMS 仿真平台进行仿真建模[16],人体模型由头部R1、上躯干R2、下躯干R3、左上臂R4、右上臂R5、左前臂R6、 右前臂R7、左大腿R8、右大腿R9、左小腿R10、右小腿R11 组成,人体基本参数及与文献[12]相同,模型各部分连接与约束关系如下:
(1)头部与上躯干采用球铰连接;
(2)上躯干与下躯干、左上臂和右上臂均采用球铰连接;
(3)下躯干与左大腿和右大腿均采用球铰连接;
(4)左上臂与左前臂采用球铰连接;
(5)右上臂与右前臂采用球铰连接;
(6)左前臂与枪体间为接触约束;
(7)右前臂与枪体间为接触约束;
(8)左大腿与左小腿采用球铰连接;
(9)右大腿与右小腿采用球铰连接;
(10)左小腿与大地间采用平移约束;
(11)右小腿与大地间采用平移约束;
(12)枪械与左右手和上躯干有3 个接触约束.穿戴武器臂时,除上面3 个接触约束外,武器挂载臂的缓冲器与武器机匣的皮卡汀尼导轨连接;
(13)穿戴背板与人体上躯干为接触副,采样6个弹簧阻尼模拟背带,使武器臂稳定地背负在人体模型上;
(14)穿戴式武器臂主体与穿戴背板为轴绞连接,侧臂组件与上臂组件为轴绞连接,穿戴式武器臂主体共3 个自由度.
按上述处理建立的人体立姿正常握持枪射击和穿戴武器臂持枪射击人枪相互作用仿真模型如图15 所示.人体立姿正常握持枪射击模型具有12 个刚体、32 个自由度;人体立姿穿戴武器臂持枪射击仿真模型具有16 个刚体、41 个自由度.调整人体模型各关节上的弹簧阻尼参数设置,使得人体在立姿持枪瞄准状态下保持平衡和稳定.模型影响枪口响应的主要刚度和阻尼参数是抵肩部、上躯干腰部和武器臂缓冲器的参数,其取值如表4 所示.
表4 模型主要刚度与阻尼参数Tab.4 Main stiffness and damping parameters of the model

图15 Adams 人-枪系统仿真模型Fig.15 Man-gun system simulation model in Adams
采用如下经典内弹道方程组确定中每发射击时的火药气体膛底合力.其具体方程如式(1)和(2)所示.
式中:S为内膛面积;P为膛内平均压力;f为火药力;Ψ为已经火药燃烧的相对质量;φ为次要功系数;Z为相对已燃厚度;ω为装药量;m为弹头质量;θ为绝热系数;u1为火药燃烧系数;δ1为1/2 火药药厚;n为燃速指数;χ、λ、μ为火药形状特征量;LΨ为药室自由容积缩径长.
采用M4 突击步枪自动机虚拟样机模型获得自动机撞击力.根据M4 突击步枪的自动发射频率以及自动机运行规律,施加三连发射击的作用载荷.根据M4 射实际击过程设置每次发射间隔时间0.01 s,第一冲量(膛底合力)与第二冲量(自动机后坐到位撞击力)间隔时间0.025 s.导入Adams 人枪相互作用模型中,三连发的载荷输入曲线图如图16 所示.
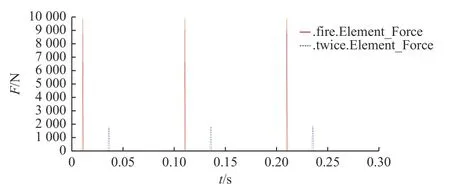
图16 三连发载荷输入曲线Fig.16 Load input curve of three burst recoil
3.2 仿真计算与分析
设置仿真时长为0.3 s(300 ms),仿真步数为1 500步,对人体立姿正常握持枪射击和穿戴武器臂持枪射击仿真模型进行仿真模拟,计算结果如图17~20 所示.
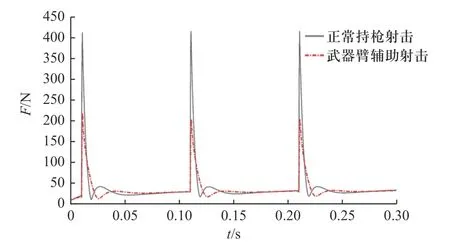
图17 两种射击状态下抵肩力对比Fig.17 Comparison of shoulder force in two shooting states
图17 是有无武器臂持枪射击时枪械抵肩力曲线对比情况,正常持枪械射击状态下枪械作用于人体模型产生的抵肩力为412.0 N;武器臂辅助射击状态下产生的抵肩力220.0 N,相比较正常握持枪械射击状态抵肩力下降了46.6%.这是因为武器臂的一端与枪身连接,武器臂的缓冲器和铰接机构对枪械的后坐运动趋势起到了一定的抑制作用,使枪械后坐力对人体的冲击得到了大幅度减缓.
图18~20 分别给出了有无武器臂持枪射击时枪口在后坐、竖直、水平方向上的位移响应曲线.
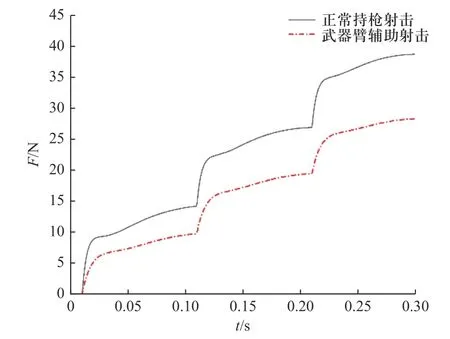
图18 枪口后坐位移响应曲线对比Fig.18 Muzzle recoil displacement curve comparison
图18 和图19 中,人体穿戴武器臂与穿戴武器臂相比,枪口后坐方向的位移计算结果减少了28.2%,枪口的竖直位移计算结果减少了39.3%,武器臂给枪械提供了竖直方向的支撑,有效抑制了枪口上跳的幅度,计算结果与试验基本一致.
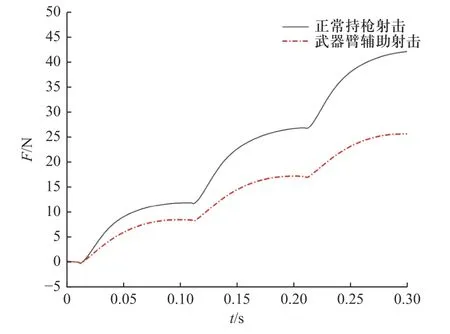
图19 枪口竖直位移曲线对比Fig.19 Muzzle vertical displacement curve comparison
图20 中,人体在有/无穿戴武器臂辅助下,枪口在水平方向的位移分别为14.7 mm、16.4 mm,有穿戴武器辅助的状态下枪口的水平位移增加了11.5%.

图20 水平位移量对比Fig.20 Horizontal displacement comparison
由于仿真模型计算只进行了300 ms,将有/无穿戴武器臂辅助射击时300 ms 枪口响应实验值与仿真计算值进行比较,结果如图21、图22 和表5 所示,误差在工程可接受范围内,说明本文建立的穿戴武器臂立姿无依托人枪相互作用动力学仿真模型是正确和可信的.
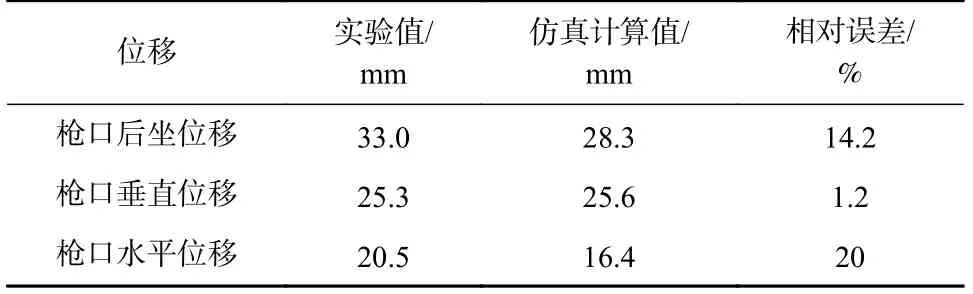
表5 穿戴武器臂辅助射击时300 ms 枪口响应实验值与仿真计算值对比Tab.5 Comparison of 300 ms muzzle response test value and simulation calculation value when wearing arms to assist shooting
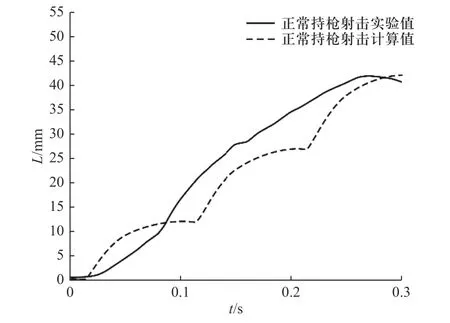
图21 正常射击连发枪口后坐位移响应计算与试验对比Fig.21 Comparison of recoil displacement curves of burst muzzle between test and simulation calculation value without wearing arms
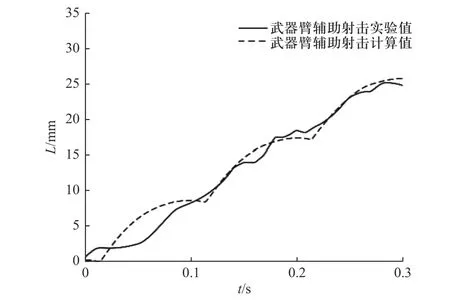
图22 武器臂辅助射击连发枪口后坐位移计算与试验对比Fig.22 Comparison of recoil displacement curves of burst muzzle between test and simulation calculation value with wearing arms
4 结 论
本文提出了一种可穿戴武器臂的总体方案,研制了可穿戴武器臂原理样机,进行了典型射手有/无穿戴武器臂人枪耦合系统发射响应实验研究;并建立了有/无穿戴武器臂状态立姿无依托人枪相互作用动力学仿真模型,进行了仿真分析.主要结论如下:
①典型射手穿戴武器臂立姿无依托点射时枪口后坐和竖直方向的位移量相比“无武器臂持枪射击状态”大幅下降,抵肩力也大幅下降,枪口水平跳动位移有所增大,射击完成后枪口跳动恢复用时明显下降,射击稳定性明显提高.
②典型射手穿戴武器臂立姿持枪瞄准时左手肌肉的积分肌电值除三角肌外均有明显的下降,肱二头肌的下降尤为显著,武器臂对枪械的支撑作用比较明显.
③本文建立的典型射手穿戴武器臂立姿无依托人枪相互作用动力学仿真模型计算结果与实验结果基本一致,可用于在设计穿戴武器臂时分析动态响应.