基于V2G 与应急通信的配电网信息物理协同快速恢复方法
2024-04-22刘达夫杨祺铭李更丰别朝红
刘达夫,钟 剑,杨祺铭,陈 晨,李更丰,别朝红
(电工材料电气绝缘全国重点实验室(西安交通大学),陕西省 西安市 710049)
0 引言
随着先进的信息通信技术(information and communication technology,ICT)在电力系统的高度应用,配电网与通信网逐渐深度耦合,形成了一个典型的信息-物理融合系统(cyber-physical system,CPS)[1]。这种耦合性使得信息网络与配电网相互依赖、互为支撑。一方面,通信网络的正常运行依赖于配电网不间断的电力供应;另一方面,配电网依靠通信网实现全局的态势感知和快速控制。因此,配电网的运行、维护策略需要考虑其信息物理耦合特性进行决策。
近年来,气候变化加剧了全球自然灾害的发生频率,各类极端事件造成了配电网停电事故的频发,凸显了配电网弹性的不足[2]。配电网弹性提升的关键在于灾后迅速利用各类灵活资源,调整系统运行方式,实现负荷的快速恢复[3]。现有的配电网恢复措施包括应急发电车调度[4]、分布式电源微电网重构[5]、线路抢修[6]、储能应急响应[7]等。近年来,随着电动汽车(electric vehicle,EV)的逐渐普及,灾后使用EV 以EV 与电网互动(以下简称“车网互动”)(vehicle to grid,V2G)的方式实现配电网供电恢复被视为配电网弹性的有效提升方式[8-12]。文献[10]通过EV 放电模型论述了V2G 资源能在停电后立即向重要负荷供电,减少停电损失;文献[11]从消费者心理学角度分析了EV 参与灾后供电的可行性,并建立模型论证了V2G 的经济性。文献[12]提出了道路抢修和EV 分层调度的负荷恢复方法,实现了EV 时空维度的优化配置。但是,上述灾后恢复研究通常未考虑故障的通信网对EV 调度造成的影响。灾害发生后,EV 的高效调度依赖于正常工作的通信网络的有效支撑。因此,V2G 的恢复策略应当考虑通信网络恢复对电力恢复的支撑作用。
由于通信网络对电力供应的依赖性,灾害在引发配电网停电故障的同时,往往会进一步引发通信网络的失效故障[13]。而配电网的有效运行依赖于通过与馈线终端单元(feeder terminal unit,FTU)的通信交互来获取电网的运行状态信息和下达对远动开关的控制指令。因此,通信网络的故障会进一步降低配电网的可观与可控能力。这种信息-物理耦合和交互特性会加速故障的传播和演化,扩大停电范围,延缓复电时间[12]。此外,通信网络的恢复对提高V2G 恢复的效率十分重要。因此,有必要考虑信息层和物理层恢复之间的耦合特性和演进机理,深入挖掘信息层和物理层灵活性资源的调节能力,研究配电系统弹性的提升方法,弥补现有供电恢复和应急措施应对极端自然灾害的不足。
通信系统故障后,可以借助应急通信技术、路由管理技术[14-15]、通信抢修[16]等方式实现通信系统的快速恢复[17]。搭载无线应急通信模块的无人机(unmanned aerial vehicle,UAV)可作为信息层的灵活资源,通过迅速部署并组建临时通信网络实现应急通信,从而恢复区域内的配电网控制能力与EV调配能力。文献[18-19]论证了无人机在配电网灾后应急通信的恢复能力;文献[20]建立了信息网络中的节点供电、信息网络流量、信息节点控制作用的约束,分析了信息网路脆弱性对负荷恢复的影响;文献[21]提出了通信网络抢修和电力抢修协调的恢复方法,进而得出紧急通信优先恢复和网格划分的协调恢复策略。然而上述研究并未将通信恢复与V2G 恢复协调配合,无法解决信息物理耦合故障下V2G 高效恢复问题。为填补该研究领域的空白,实现配电网信息-物理故障下的快速恢复,需要探究极端事件下的V2G 信息物理协同恢复方法。
在此背景下,本文提出了一种基于V2G 和应急通信的配电网分区信息物理协同快速恢复方法,以解决配电网信息物理协同故障恢复问题,提升灾后配电网负荷恢复效率。本文的主要贡献包括:1)在配电网资源受限的情况下,将EV 对电力系统的恢复作用和无人机对通信系统的恢复作用协同考虑,充分发挥信息层和物理层灵活资源互补优势;2)深入分析灾后信息层和物理层的相互依赖关系,提出了信息物理耦合约束模型,该模型能够准确刻画恢复过程中各个调节资源间的制约关系,使得恢复方案满足信息物理耦合特性;3)本文所提恢复方法通过调配无人机和EV 资源分区域逐步恢复负荷,在多处信息盲区情形下仍然具有较高的恢复效率,为大面积信息物理故障场景下配电网弹性提升提供新思路。
1 配电网信息物理协同恢复框架
灾害发生后,配电网线路故障往往会导致大量负荷停电,进而因部分通信基站失电出现大片信息盲区。城市集群EV 可以实现大量电能的时空转移,为负荷提供紧急功率支撑,可用来缓解灾后电力资源紧缺问题。上述集群EV 的调配和配电网的拓扑控制依赖于通信网络。因此,须提供应急通信保障V2G 策略的有效实施。无人机移动基站可以高效调度并快速组网,为灾后信息盲区提供应急通信,解决上述区域的通信故障问题。本文建立了基于无人机应急通信和集群EV 调配的恢复方法,通过拓扑控制的耦合约束,构建了配电网信息物理协同快速恢复策略。
该恢复策略须基于配电网信息物理系统和智慧交通系统(intelligent transportation system,ITS)[22]展开研究。其中,配电网信息层由FTU、无线网基站、配电变电站等通信节点以及节点之间的通信链路构成,物理层可视为由母线、线路、分布式电源组成的拓扑结构;智慧交通系统建模为包含了信息处理中心、通信基站、V2G 站点、EV 和城市路况的交通网络。如图1 所示,本文将两系统耦合为通信-电力-交通系统,作为配电网灾后恢复的研究基础。对于通信层和电力层,电力线路的有效控制依赖于通过完整的通信链路向FTU 下发控制指令,进而控制远动开关分合实现电力线路的开断控制;对于通信层和交通层,安装在EV 上的无线终端电子设备可以监测和采集EV 实时状态信息并上送调控中心,驾驶员也能通过无线网络获取包括导航计划和调配指令在内的外部信息;对于电力层和交通层,EV 能够驾驶至V2G 站点灵活形成分布式电源,进而为负荷供电。在信息盲区恢复通信时,配电主站能够通过与智慧交通系统实现数据交互,从而获取该区域EV 信息并对其进行调控。
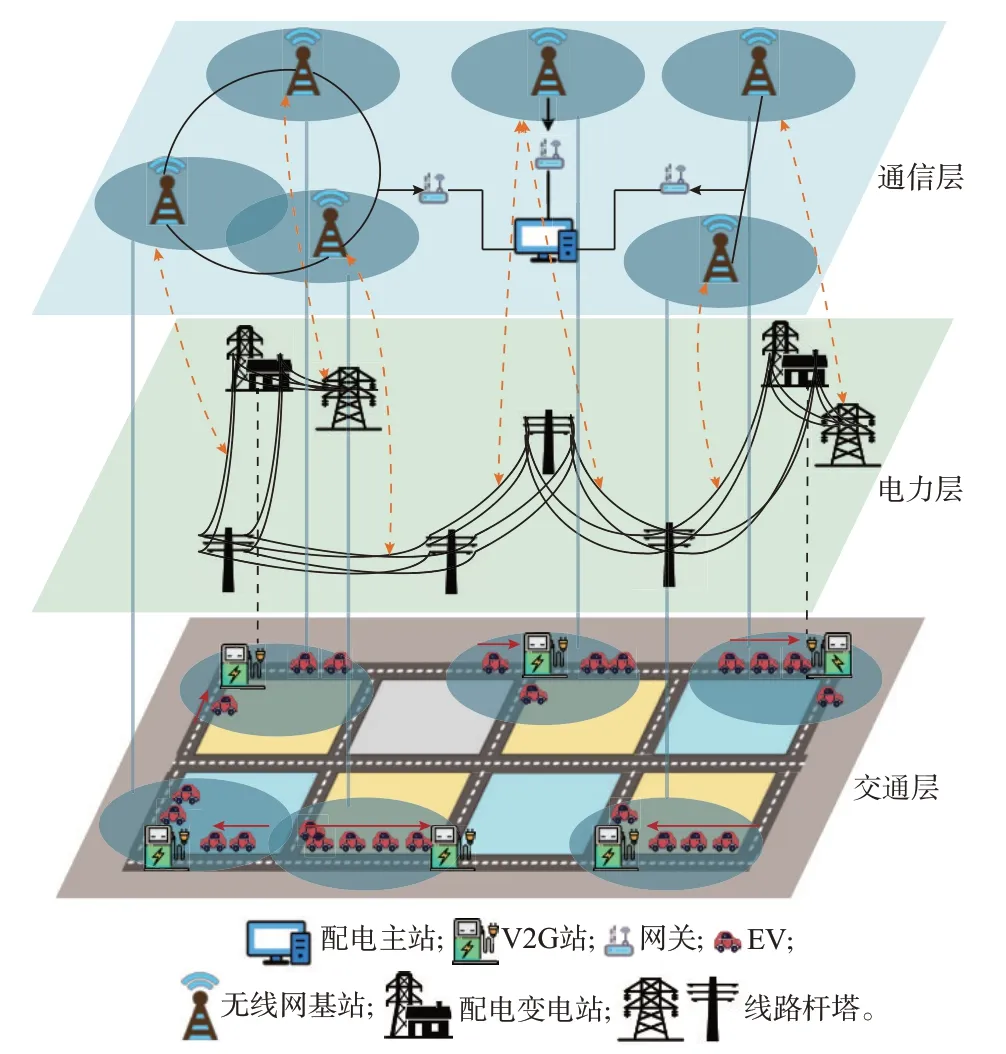
图1 通信-电力-交通耦合系统Fig.1 Communication-power-transportation coupling system
本文所考虑利用V2G 恢复负荷电力供应的配电网,其线路在断电且其所属FTU 与主站通信故障的情况下,FTU 会控制线路远动开关跳闸,从而降低失去可控与可观能力的配电网元件给配电网带来的运行风险。在信息物理协同故障发生时,首先派遣搭载移动基站的无人机前往目标区域组建应急无线通信网络,恢复对该区域配电网线路开关的控制能力和对EV 的导航、调配能力,进而引导EV 前往区域内V2G 站点形成分布式电源,以控制配电网线路动态形成由分布式电源供能的微电网[23],最终实现基站和其他负荷的快速恢复,具体流程如图2所示。
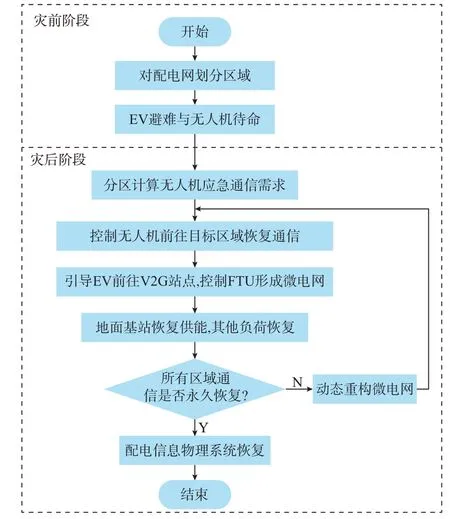
图2 信息物理协同恢复过程流程图Fig.2 Flow chart of cyber-physical integrated restoration process
具体过程如下:
第1 个阶段为灾前预备阶段。首先,该方法基于地面基站通信覆盖范围,将配电网划分为多个信息区域,以便于对通信故障进行分析与恢复处理。在灾害发生前,智慧交通系统提前广播灾害信息,城市道路中行驶的EV 在收到广播信息后将前往最近的避难站点避难;应急指挥中心所管理的无人机设备进入待命状态,做好快速、有效响应的准备。
第2 个阶段为灾后恢复阶段。首先,对每个区域灾后无人机应急通信需求进行建模,寻找最少数量无人机调配下的通信盲区恢复可行性控制方案;然后,控制无人机前往目标区域组建临时通信网络,恢复该区域的FTU 设备与EV 通信,进而恢复主站对该区域的FTU 的观测控制能力和对EV 的调配能力,同时该区域内系统故障情况也能通过无人机基站上传至配电主站。其次,配电主站下达调度指令并通过有效的激励机制引导EV 驶入目标V2G 站点形成分布式电源,进而控制配电网拓扑重构,形成以V2G 站点为中心的微电网,保证地面通信基站供电恢复并最大限度恢复负荷;当原区域EV 转移完毕,无人机前往下一区域继续开展恢复工作,微电网拓扑随着新的区域通信恢复而动态变化,直至最大恢复整个区域负荷的电力供应。
需要说明的是,本文所研究的灾害场景并未达到系统崩溃的程度,也不会造成严重的交通道路故障。当灾害结束不再对系统造成破坏时,调度主站对EV 再调度的引导能够保证EV 用户人身安全,且参与V2G 电力恢复的EV 用户能够获得一定的经济收益[11]。
2 灾前阶段预备模型
灾前阶段对EV 的避难调度行为展开建模,应急中心工作人员对无人机进行充电和功能调试,为系统灾后快速恢复做好准备工作。为准确刻画EV灾前调度过程,通过出行链理论[11]和实时状态模型来描述EV 的运行特性,并引入避难意愿系数来衡量响应避难调度的EV 用户占比,进而获取灾后各避难站和V2G 站点的EV 数量;同时引入参数,以量化灾后能够参与通信恢复的无人机数量。
2.1 EV 灾前调度模型
当灾害即将来临时,EV 收到灾害信息后暂停自由调度,随后EV 响应紧急避难调度,原本在V2G站点进行充电的EV 停止充电并就地避难,并将正在道路上行驶的EV 引导至最近的避难站。在避难阶段,需要确定EV 的分布状态和行驶特性。避难场所有足够的容纳能力,V2G 站仅能容纳灾前正充电的EV 临时避难。
2.1.1 路网模型
本文基于Dijkstra 算法来确定任意两点间的最短行驶路径[11]。
式中:G′为路网集合;V为简化图中路网节点的集合;E为图中各节点间连接关系的集合。生成矩阵D(G′)表示各节点间的直接距离,若无直接连接路径,则矩阵相应元素为无解。
2.1.2 EV 出行链模型
出行链理论可用于刻画EV 的运行特性。通过考虑EV 用户的出行特征,可有效模拟得到调度周期内EV 在交通网络中的分布状态和电池充电状态,从而获得在灾后阶段V2G 站点可以为电网提供的电量。出行链集合表达式为:
式中:Cchain为出行链集合,集合中的元素包括起点b0、终点bf、出行链线路w0f、线路长度l0f、出发时刻t0、到达时刻tf、行驶时间t0f和停留时间tp。
第n段路程的行驶时间t0f,n、到达时刻tf,n和下一段路程出发时刻t0,n+1表达式为:
式中:dn为第n段路程的长度;v′为EV 的平均速度。
2.1.3 EV 避难意愿
不同用户的风险感知和承受能力存在差异,进而影响EV 的应灾行为。在灾前EV 避难调度阶段,一般引入避难意愿系数β1来量化响应避难调度的EV 数量[24]。
式中:Nref为参与避难调度的EV 数量;Nev,total为系统的EV 总数。
2.1.4 EV 避难调度模型
式中:Nroad为避难阶段道路上行驶的EV 数量;Nsta为避难阶段V2G 站内的EV 数量;di,j为第i辆EV至第j个避难站的行驶距离,可由Dijkstra 算法确定;P为避难站点集合。
2.1.5 EV 实时状态模型
式中:Sstatus为避难调度结束后每辆EV 实时状态信息的集合;Crem为EV 剩余电量集合;W为行驶状态集合。
2.2 无人机预备模型
为满足城市电网应急通信需求,包括故障检测、设备巡视和紧急通信等任务,应急指挥中心通常配置一定数量的通信无人机,对于单个无人机通信基站,上行速率可达40 Mbit/s,下行速率可达80 Mbit/s,而一般通信速率达到600 bit/s 以上就能够满足配电自动化的绝大部分功能要求[25]。上述无人机能够快速响应并提供应急通信和监测支持,帮助城市电网维修和恢复工作。
灾前收到灾害预报信息时,应急指挥中心工作人员即刻给通信无人机充电并检查其设备及搭载的模块是否正常。通信无人机的充电和功能调试过程需要时间,只有完成充电和功能检测才能可靠执行后续通信组网和恢复工作,引入参数δ以描述经过灾前检查预备就绪的无人机数量。
式中:Nuav为参与灾后通信恢复工作无人机的数量;Nuav,total为应急中心无人机总数量。
3 灾后阶段快速恢复模型
灾害结束后对灾前调度至各避难站的EV 实施激励措施[11],引导EV 用户参与V2G 反向输电以恢复电网,并统计响应V2G 调度的EV 数量、剩余电量以及参与通信恢复的无人机数量等数据。
灾后阶段首先求解各区域的无人机应急通信需求,然后对无人机和EV 的调度行为、V2G 站点出力特性及微电网拓扑特征展开建模,从而得到配电网信息物理系统快速恢复策略。灾后无人机依次引导EV 再调度形成分布式电源和控制FTU 分合开关以保证地面基站与分布式电源连通。
3.1 无人机路径规划模型
本研究考虑无人机在其工作过程中,相应工作人员可根据其荷电状态为其配送储备电池进行更换[26]。由于电池更换过程时间较短,可视无人机保持连续工作状态。另外,在小规模电网的通信恢复过程中,当通信恢复过程时长不超过无人机续航时长时,不用考虑其电量影响。
3.1.1 区域无人机通信需求建模
本文考虑了实际单台无人机通信覆盖能力,对无人机调配问题进行建模。为此,需要计算各区域最少的无人机需求量。该问题可以建模成一个位置集合覆盖模型(location set covering problem,LSCP),目标是在区域所有母线节点FTU 装置和V2G 站点被覆盖的情况下无人机工作点数量最少。FTU 装置通信正常后才可以控制所连开关开断,进而调整配电网拓扑结构,本研究将各电力节点处FTU 装置视为通信节点。为降低LSCP 问题的复杂度,通过将目标区域离散为点集以简化模型[27]。离散后的无人机工作点确定模型如下:
式中:pm为0-1 变量,若点m被选做无人机工作点则pm=1,否则pm=0;n′为待选工作点数量;hi,m为0-1变量,表示通信节点i是否被点m处无人机覆盖,若覆盖则hi,m=1,否则hi,m=0;di,m为无人机通信半径与通信节点i和点m处直线距离的差值;Xi、Yi分别表示节点的横、纵坐标;r为无人机通信半径;Ccom为通信节点集合;Muav为无人机工作点集合。式(12)表示每一个通信节点i至少被一个无人机覆盖;式(14)和式(15)表示只有无人机与通信节点距离小于通信圆半径,该通信节点才能被无人机覆盖。
3.1.2 无人机空间约束
无人机的空间部署约束如式(16)至式(20)所示。
式中:xi,j,c为第c个无人机从工作点i到j的0-1 变量,1 表示无人机从工作点i前往j,否则为0;S为无人机的起点集合;F为无人机实际工作点集合;F{i}表示除去工作点i的无人机工作点集合;R为无人机的终点集合;U为全部无人机的集合,集合元素个数为Nuav;yi,c为0-1 变量,若第c个无人机离开第i个失电通信基站时该通信基站已经恢复正常,则该变量值为1,否则为0;N为失电通信基站集合;E为EV 的集合;Ccap,i为第i辆EV 传输数据所需容量;Ctotal,c为无人机c的通信容量。式(16)表示无人机的工作路线是单向的,无人机需要先离开上一个失电基站后才能抵达下一个失电基站;式(17)表示无人机从起点出发单向前往工作点和终点,中途不允许折返;式(18)和式(19)是失电基站供电恢复完成约束;式(20)表示无人机数据传输容量限制约束。
3.1.3 无人机时间约束
式中:M为较大正实数;ti,c,arrive为无人机c在抵达工作点i的时刻;ti,c,rep为无人机c停留在工作点i的时间;tij,c,tra为无人机c从工作点i前往工作点j的通行时间。式(21)表示无人机从工作点i到达工作点j,则无人机到达工作点j的时刻大于等于到达工作点i的时刻加上悬浮时间以及在两者之间的移动时长。
3.2 EV 灾后再调度模型
灾害结束后,通过经济激励的方式引导停留在各避难站点避难的EV 有序前往目标V2G 站点形成分布式电源并参与电网反向输电,为关键负荷提供紧急功率支撑,最大限度降低灾害对电力供应的影响。其中,灾前停靠在V2G 站点避难的EV 可即刻响应为负荷供能,不再参与再调度过程。
3.2.1 EV 再调度响应约束
灾后基于经济补偿的激励机制可以促使避难站中EV 参与V2G 供电恢复再调度,然而在一定的激励措施下,EV 用户对激励的感觉阈值存在差异[11]。因此,引入系数β2来表示灾后阶段各避难站中响应V2G 调度引导的EV 占比。
式中:Nev为参与再调度的EV 数量。
3.2.2 交通拥堵约束
自然灾害会对交通系统产生影响,可能会造成交通流量变化和道路拥堵,不同路段车流速度与该路段交通拥堵程度关系为[28]:
式中:vn为灾后第n段道路上EV 的行驶速度;In,tpi为第n段道路的交通拥堵指数;Cn为灾后第n段道路上的车流密度;Cn,max为第n段道路最大车流密度。交通拥堵指数对应的拥堵程度参见附录A 表A1。
3.2.3 EV 调度时空约束
式中:NV2G为V2G 站点数量;Ki,j,t为0-1 变量,若在t时段第j辆EV 抵达第i个V2G 站点,则Ki,j,t=1,否则Ki,j,t=0;V为V2G 站点集合;T为调度区域通信恢复时段集合;Ti,tra为第i辆EV 再调度在道路交通网中的耗时,该时间可以通过Dijkstra 算法确定;Ttotal为EV 调度总时段数。式(25)表示再调度过程中每辆EV 最多只能进入一个V2G 站点;式(26)表示EV 在到达V2G 站点后才能与电网交互;式(27)表示EV 驶入目标V2G 站点后不再变更位置,即由于调度的经济性和紧急性的影响,不考虑EV 的多次调度问题;式(28)表示为确保V2G 站成为稳定、可靠的电源,无人机停留时间不应小于该区域EV调度最长耗时。
3.2.4 EV 调度数量约束
式中:Ni,ev为第i个V2G 站点所能容纳最多EV 的数量。式(29)的含义是通过调度进入V2G 站点的EV数量不应该大于参与再调度EV 总量;式(30)的含义是通过调度进入V2G 站点的EV 数量不应超过该V2G 站点所能容纳最大EV 数量。
3.2.5 EV 容量约束
式中:pi,j,t为第t时段第i个V2G 站点的第j辆EV 向电网反向充电功率;Si,j为第i个V2G 站点的第j辆EV 的电池剩余电量。式(31)和式(32)表示参与V2G 的EV 供给电量不应大于其电池电量。
3.3 配电网动态恢复模型
目标区域通信恢复后,以各V2G 站点反向输电作为分布式电源,控制开关状态形成微电网为负荷供电,随着各区域通信的逐渐恢复,微电网拓扑随之动态调整。配电网负荷恢复模型主要涉及三方面约束条件:拓扑约束、运行约束和信息物理耦合控制约束。
3.3.1 拓扑约束
单商品流方法可以保证灾后形成的微电网拓扑连通性和辐射状[29],其微电网生成的方法如下:首先定义商品在配电网电力拓扑图内的流通路径,每个母线节点都有单位商品需求,当节点的需求得到满足时,即表示该节点接入微电网,即存在电源向该节点供电,相关约束如下:
式中:dk,t为0-1 变量,为主站对第k条线路的开关决策,若控制线路闭合则dk,t=1,否则dk,t=0;fk,t为第k条线路的商品流;fi,t为第i个节点的商品流需求;fi,t,gen为电源节点的商品流注入量;Dk,i为代表第k条线路与第i个节点是否连接的0-1 变量;B为配电网节点集合;L为线路集合;G为电源节点集合;BG为非电源节点集合;Fi为与第i个节点相连线路的集合。式(33)至式(37)是单一商品流约束;式(33)表示商品流只能从闭合的线路上流通;式(34)表示若线路闭合,则其两端节点接入电网的状态应为相同;式(35)表示任意非电源处节点,流出该节点的商品流之和应为0;式(36)表示对于电源节点,流出该节点的商品流之和应等于该电源注入的商品流;式(37)为配电网辐射状拓扑形成约束。
3.3.2 运行约束
配电网的运行约束如式(38)至式(49)所示。
式中:pk,t和qk,t分别为第k条线路的有功功率和无功功率;bi,t,load表示第i个节点负荷是否接入的0-1 变量;pi,t,load和qi,t,load分别为第i个节点的有功和无功负荷需求;pi,t,gen和qi,t,gen分别为第i个电源节点的有功和无功注入;Vi,t为第i个节点的电压;Vref为节点的额定电压;pmax,V2G和pmin,V2G分别为V2G 站点向电网输电的最大和最小功率;rk和xk分别为第k条线路的电阻和电抗。式(38)至式(41)是线路功率约束;式(42)至式(45)是节点功率平衡约束;式(46)是节点电压幅值约束;式(47)是相邻节点电压约束;式(48)是负荷接入约束;式(49)是V2G 站点出力约束。
3.3.3 信息物理耦合拓扑控制约束
考虑到配电网运行的安全性,若欲控制一条断开的线路闭合,其两端的母线节点必须工作状态正常且可观测(即其所属FTU 与主站通信正常);而断开一条原本闭合线路,仅需单侧的母线节点即可实现线路跳闸。因此,通信状态与配电网线路控制的耦合约束具体如下:
式中:sk,ini为第k条线路初始开关状态的0-1 变量;hi,m,t为0-1 变量,表示通信节点i在t时段内是否被点m处的无人机覆盖。
3.4 目标函数
模型的目标函数是使得总加权供电量最大。即
式中:ωi为第i个节点所接负荷的重要程度。
4 信息物理协同恢复步骤
V2G 资源和应急通信协同的配电网恢复过程须遵循信息物理耦合特性,为深入说明两类灵活性资源的配合情况,本章从模型求解和策略实施分别进行流程说明。
4.1 模型求解
灾前阶段预备模型可模拟得到EV 避难结果和无人机准备情况,将相关数据作为参数传递至灾后模型;灾后阶段快速恢复模型是混合整数线性规划模型,采用商业求解器GUROBI 进行求解。具体求解流程如下。
步骤1:输入配电网网络参数、V2G 站点和避难站位置信息,以及系统EV 和无人机数量信息。
步骤2:运行灾前阶段预备模型,模拟得到停留在各避难站和V2G 站点的EV 数量,以及准备就绪的无人机数量数据(如式(2)至式(10)所示)。
步骤3:生成极端灾害下故障场景,根据步骤1确定失电故障基站和信息盲区数量。
步骤4:根据步骤3 信息盲区面积确定各区域无人机需求量(如式(11)至式(15)所示)。
步骤5:考虑无人机时空调度约束(如式(16)至式(21)所示)调配无人机前往目标区域恢复通信,进一步根据步骤2 确定响应激励的EV 数量数据和相关约束(如式(22)至式(32)所示)引导EV 再调度,同时考虑拓扑约束(如式(33)至式(37)所示)控制该区域形成微电网,以实现地面基站和其他负荷恢复。
步骤6:判断所有信息盲区是否恢复通信,若全部恢复则求解结束,输出配电网分区信息物理协同恢复策略;否则,更新通信已恢复区域的微电网拓扑,跳转至步骤5,直至所有区域通信永久恢复,结束求解。
4.2 操作实施流程
根据信息物理协同恢复思路和程序求解流程,结合工程实际情况,设计了包含灾后调配顺序和运行规则的操作实施流程,以指导相关部门开展恢复工作。具体流程如下。
步骤1:灾后恢复阶段,配电主站确认系统信息盲区,无人机从应急中心仓库出发前往目标区域组网恢复通信。
步骤2:目标区域通信恢复后,配电主站获得该区域线路故障信息并开展优化决策,将调度指令发送给避难站的EV,引导其快速有序前往V2G 站点参与反向充电;同时,将拓扑重构指令下达至各FTU 处,系统中相应远动开关进行倒闸操作。
步骤3:目标区域通信基站复电后,无人机依据配电主站指令前往下一区域组建通信网络,并重复步骤2 工作。若无再调度指令,则无人机返回应急中心仓库。
步骤4:当所有区域通信基站投入正常运行时,配电系统信息物理协同快速恢复工作结束。
5 算例分析
本文将改进的IEEE 33 节点配电网和30 节点交通网组合成一个耦合系统进行算例分析,配电网节点和交通网节点间的对应关系参考文献[30],交通网拓扑结构如附录B 图B1 所示。配电网拓扑结构如图3 所示。图中:依据地面基站通信覆盖范围划分成4 个区域,并对V2G 站点、避难场所、通信基站和应急中心仓库点进行了标注,各节点负荷需求及重要程度参见附录B 表B1 和表B2。每个V2G 站点共有20 台充电桩,充电桩的充放电功率为7 kW,参与再调度过程的EV 参数详见文献[11],β1取0.95,β2取0.85。本章算例分析使用的计算机配置为:1.60 GHz Intel Core i5-10210U,16 GB RAM,64位操作系统。
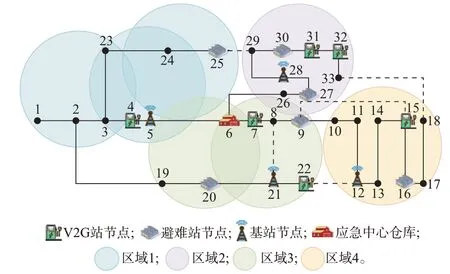
图3 改进IEEE 33 节点系统示意图Fig.3 Schematic diagram of improved IEEE 33-bus system
假设极端自然灾害导致节点1 下主网所能提供的最大电力缩减为正常情况下的50%,线路(2-19)、(3-4)、(6-26)、(8-21)、(9-15)、(12-13)、(30-31)发生永久性故障无法闭合,下游失电线路自动跳闸,地面通信基站停电退出运行。附录B 表B3 列出了各区域内避难站与V2G 站间的近似交通距离,表B4列出了不同区域无人机应急通信数量需求,表B5 列出了无人机在不同区域间调度所耗费的时间。
5.1 基于无人机应急通信和V2G 的供电恢复分析
为说明信息物理耦合特性以及信息层和物理层灵活资源协同对配电网恢复的影响,本节对比分析了不同方案下的负荷恢复效率,具体如下。
1)方案1:采用文献[11]所提恢复方法,即不考虑应急通信建立和EV 再调度,仅依靠灾前在V2G站点避难的EV 恢复负荷。
2)方案2:采用文献[18]所提恢复方法,即调配无人机建立应急通信,但不考虑EV 再调度,仅依靠灾前在V2G 站点避难的EV 和动态微电网恢复负荷。
3)方案3:采取本文所提恢复方法,即无人机应急通信和V2G 协调配合以实现配电网重构恢复负荷。
设置整个系统EV 数量为300。
5.1.1 各方案恢复效果对比
该子算例对上述3 种方案进行对比实验,以分析无人机应急通信和V2G 资源对灾后供电恢复的影响,如图4 所示。从图中可以看出,通过对比方案1、方案2 和方案3 的负荷恢复曲线可知,灾后t=0时刻主网受损传输功率下降,节点1 上游变电站仍能够向所连通负荷供电,提供部分功率支撑,但系统由于多处断线故障,处于严重功率缺额状态。对比方案1 和方案2、3 可知,方案2 比方案1 供电量增加40.95%,方案3 比方案1 供电量增加92.13%,由此可知无人机参与调度可极大程度提升灾后负荷恢复量,这是因为无人机作为信息层灵活资源在受灾区域可以建立应急通信,恢复电网的可观、可控性,从而控制FTU 动作,调整电网拓扑结构、优化线路潮流,使更多的负荷节点能够与节点1 上游变电站连通。方案3 比方案2 供电量增加35.52%,由此可知EV 再调度可进一步提升系统恢复效果,这是因为灾后大多数EV 停留在避难站点,只有将它们有序高效地调度至目标V2G 站点才能充分发挥V2G 资源对负荷的供电支撑作用。方案1 和方案2 的负荷恢复曲线在恢复中后期会出现下降的现象,这是因为灾前仅有少部分原本正在充电的EV 停留在V2G站点就近避难,灾后这部分EV 会立即向电网反向充电,如若不考虑其他避难点EV 资源的再调度,少量EV 有限电能耗尽后V2G 站点将暂停向电网供能,系统负荷恢复量减少。
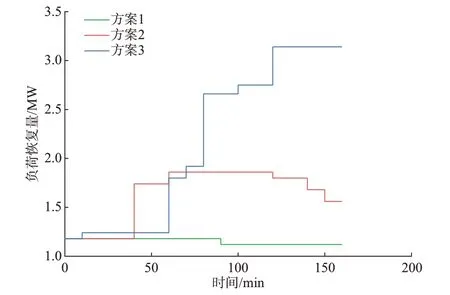
图4 3 种方案负荷恢复曲线Fig.4 Load recovery curves of three schemes
模型求解用时方面,方案1 模型求解耗时187.29 s,方案2 模型求解耗时209.63 s,方案3 模型求解耗时228.98 s。方案3 与方案1 相比,模型增加了无人机调配约束、EV 再调度约束和信息物理耦合约束;方案3 与方案2 相比,模型增加了EV 再调度约束和信息物理耦合约束,更多的变量和约束条件导致模型求解时间增加,但提升了模型针对配电网信息物理故障恢复问题的适用性,使得灾后更多负荷在短时间内快速恢复。此外,方案3 计算时长与灾后数小时甚至数天的恢复周期[31]相比较短,故认为其满足灾后恢复决策时限要求。
上述结果说明:方案3 与方案1 相比,通过无人机建立通信网络,进而引导EV 前往V2G 站点形成分布式电源并调控线路开关动态构成微电网,使得更多负荷与电源连通恢复;与方案2 相比,充分利用V2G 资源,可实现更多负荷的供电支撑。因此,本文提出的无人机应急通信和V2G 的配电网分区信息物理协同恢复方案能够考虑灾后配电网信息层和物理层耦合交互特性,充分利用系统有限电能资源,实现灾后配电网快速恢复。
5.1.2 方案3 结果分析
该子算例对方案3 系统各区域逐步恢复和EV再调度情况进行展示。由图5 可知,3 架无人机首先前往区域1 建立应急通信网络,因为区域1 中节点1与上游变电站相连,区域1 信息物理系统功能恢复可以保证后续更多负荷与变电站连通,加速系统恢复;随后,区域1 中一架无人机前往区域2、两架无人机前往区域3 分别展开通信组网工作;最后,区域2中无人机前往区域4 恢复负荷。图5 中各区域通信基站节点负荷都优先恢复,这样能保证区域可观、可控性得以持续恢复,无人机调度至目标区域建立通信网后,通过控制FTU 形成微电网和引导EV 再调度,确保区域内基站节点与电源节点形成通路以恢复基站的电力供应。图4 中方案3 负荷恢复曲线存在多个上升拐点,这些拐点所处时刻与系统状态改变时刻相对应,即FTU 动作使得更多负荷与电源连接或者是EV 驶入V2G 站点使其反充功率增加。
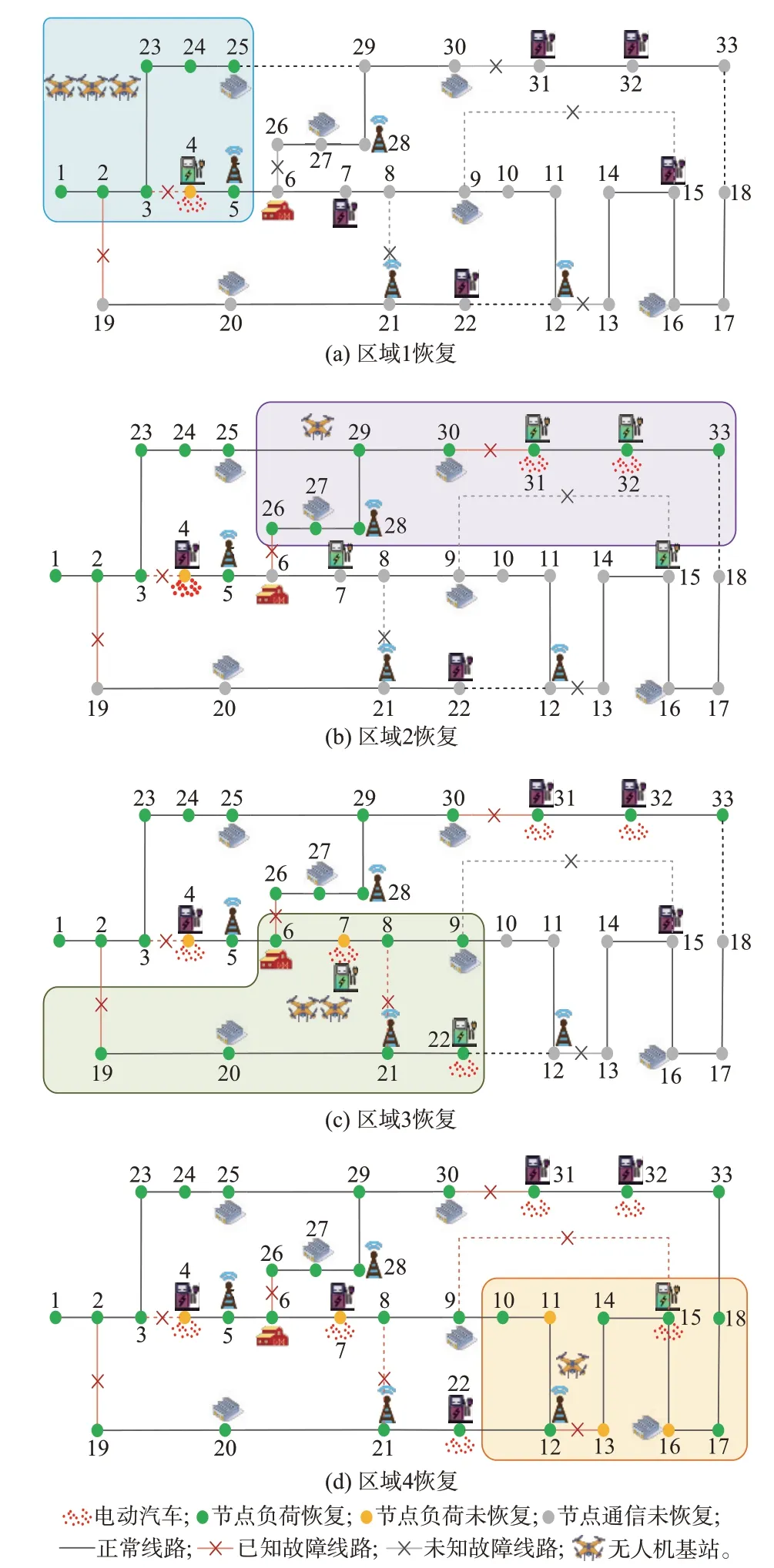
图5 方案3 中各区域动态恢复情况Fig.5 Dynamic restoration of each region in scheme 3
图6 给出了方案3 中各V2G 站点EV 数量变化情况,附录C 表C1 展示了方案3 中各避难站向V2G站点调度EV 的情况。有两点现象值得注意:
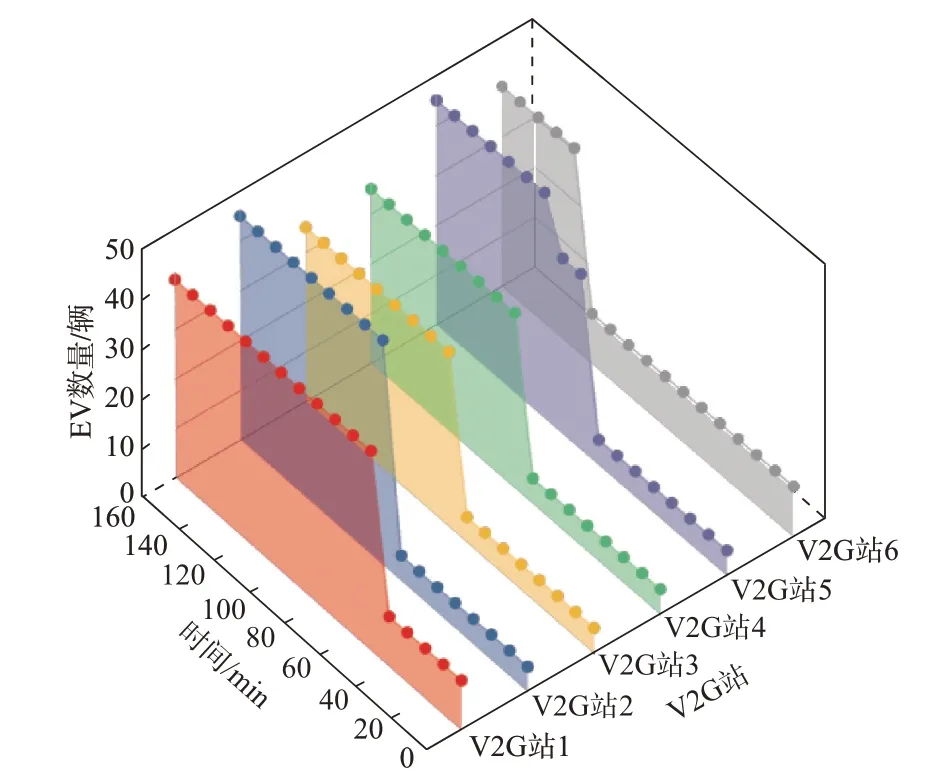
图6 方案3 中各V2G 站点EV 数量变化情况Fig.6 Changes in numbers of EVs at each V2G station in scheme 3
1)V2G 站EV 数量的变化会对系统恢复造成影响,例如,恢复工作开始后80~100 min 这段时间内,分别有130 辆和10 辆EV 先后驶入V2G 站点,使得V2G 站能够提供更大的功率支撑,恢复更多的负荷,对应图4 方案3 恢复曲线同一时段内两个上升拐点。
2)对于区域2 的V2G 站2 和V2G 站3,它们对应电网中相邻的节点且之间没有线路故障,作为分布式电源参与恢复时起到的作用基本相同,所以该区域避难站EV 再调度遵循“距离优先”原则,即EV调度至距离所处避难站最近的V2G 站,导致节点27避难站40 辆EV 前往V2G 站2,节点30 避难站30 辆EV 前往V2G 站3。对于区域3 的V2G 站4 和V2G站5,它们对应电网中相隔较远的节点,作为电源参与恢复起到的作用不同,所以该区域避难站EV 再调度会综合考虑距离和目标V2G 站重要程度等因素,导致节点20 避难站10 辆EV 前往距离较远的V2G 站5。
5.2 EV 数量及V2G 站分布对恢复效果的影响
为探究V2G 资源对灾后负荷的功率支撑作用,分别从EV 数量和V2G 站点分布两个角度分析恢复效果。
5.2.1 EV 数量对恢复的影响
该子算例改变5.1 节方案3 中系统EV 数量,表1 给出了相应的恢复效果。当EV 数量小于400 辆时,V2G 站返送总功率和灾后2.5 h 内累计负荷供电量随着EV 数量的增加而增大。但当EV 数量达到400 辆之后,系统的恢复效果基本不再变化。
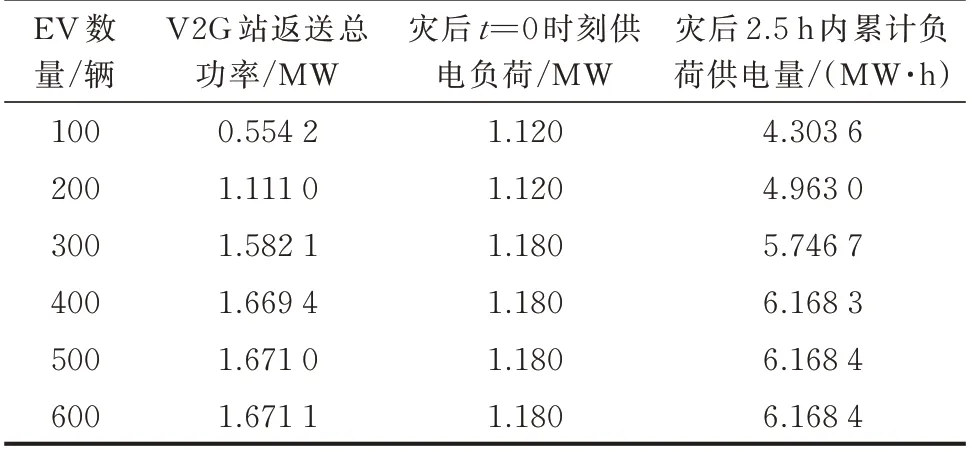
表1 EV 数量变化时的恢复效果对比Table 1 Comparison of recovery effects when number of EVs changes
由此可见,在一定范围内EV 数量的增加能够有效提升V2G 资源灾后对电网的供电支撑能力,进而促进系统恢复。然而,由于V2G 站点充电桩数量和配电网传输容量有限等原因,当EV 数量达到一定数值后,继续增加系统EV 数量时将无法进一步提升整体恢复效果。
5.2.2 V2G 站分布对恢复的影响
该子算例改变5.1 节方案3 中系统V2G 站点的位置,表2 展示了相应的恢复效果。当原本处于下游节点处的V2G 站点移位至上游节点处,灾后2.5 h内累计负荷供电量将会减小。
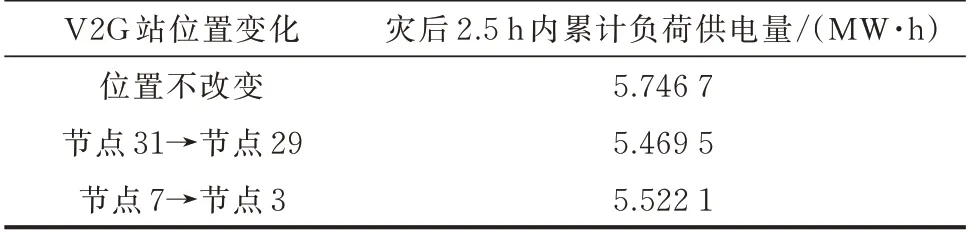
表2 V2G 站位置变化时恢复效果对比Table 2 Comparison of recovery effects when V2G station position changes
这是因为在系统出现多条线路断线故障时,EV凭借其移动特性可以针对性地进行时空转移至下游节点处V2G 站形成分布式电源,进而构成微电网恢复下游无法与变电站节点连通的负荷,一旦变更V2G 站位置将会导致下游节点负荷失去电源,难以有效供电。
6 结语
本文充分考虑配电网信息物理耦合特性并挖掘信息层和物理层灵活资源,基于V2G 负荷恢复和应急通信提出了配电网信息物理协同快速恢复方法,并在此基础上建立了灾后信息物理协同恢复的混合整数线性规划模型,进而求解模型得出配电网快速恢复策略,从而有效提升配电网弹性。本文主要结论如下:
1)相比于不考虑无人机调度的恢复方案,本文所提恢复方法能够适用于系统大面积通信故障的情况,通过利用无人机迅速组建灾后应急通信网络,有效调度EV 前往V2G 站返送电能并控制网络重构动态形成微电网,实现负荷的快速恢复。
2)考虑到配电网灾后短期内电能资源稀缺,本文所提恢复方法能够充分利用并有效引导系统中的EV 资源,最大限度提升灾后配电网的系统弹性。此外,灾后避难站的EV 再调度结果取决于目标V2G 站点对系统恢复的影响效果和两者之间的距离。
3)本文方案建模论证了灾后负荷供电效果受系统EV 数量、V2G 站充电桩数量和V2G 站的位置等多种影响因素的制约关系,为后续相关研究提供支撑。在一定范围内,随着EV 或V2G 站充电桩数量的增加,负荷恢复量会随之增加;下游节点处的V2G 站可作为微电网电源恢复周围因故障无法与变电站节点连通的负荷,从而提升系统恢复效果。
后续研究将对考虑故障修复的配电网信息物理协同恢复问题进行探索。
本文研究得到西安交通大学电气工程学院博士研究生秦玉文、硕士研究生李明昊,以及国网无锡供电公司季陈林的帮助,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。