基于视线角速度精度的导引系统抗干扰性能评估指标研究
2024-04-18徐航白晓东张喜涛
徐航 白晓东 张喜涛


摘 要: 针对传统抗干扰性能评估指标集中在导弹制导系统层面, 无法满足导引系统抗干扰性能评估的问题, 本文在分析抗干扰过程中制导系统内部误差传递原理的基础上, 基于导引系统的测量误差, 提出了基于视线角速度精度的导引系统抗干扰性能评估指标, 从而在导引系统研制过程中, 能够及时对其抗干扰性能进行评估。 由于视线角速度精度在外场试验中不易测量, 为了提高该指标的测试效率, 基于比例导引制导原理, 给出了视线角速度精度的简化计算方法, 并针对非比例导引制导场景, 给出了利用识别时间对视线角速度精度进行等效测试的方法。 外场数据测试结果表明, 该指标能够反映导弹在不同场景下的抗干扰性能, 具有一定合理性。
关键词: 视线角速度; 抗干扰; 导引系统; 识别时间; 评估指标; 导弹
中图分类号: TJ765
文献标识码: A
文章编号: 1673-5048(2024)01-0066-05
DOI: 10.12132/ISSN.1673-5048.2023.0080
0 引 言
随着红外对抗技术的迅猛发展, 红外成像导引系统所面临的战场环境日趋复杂, 近距格斗导弹作战过程中必将伴随激烈的光电对抗和大机动过载, 没有干扰的净空作战环境基本不存在, 导弹的抗干扰性能是决定导弹作战效能的重要指标[1]。
为了解决抗干扰性能定量评估的问题, 传统的抗干扰性能评估方法综合利用导弹在数字仿真、 半实物仿真及实弹靶试中的数据, 形成基于制导精度要求的综合抗干扰概率, 目前国内外抗干扰性能评估主要集中在制导系统, 评估指标的研究热点集中在不同试验系统抗干扰概率的综合计算方法上。 王涛等人[2]从时域、 频域、 能量域、 空域和信息域等维度研究了红外导弹的抗干扰评估方法, 并进行了仿真验证。 庞艳静[3]提出了基于层次分析法的导弹抗干扰能力评估方法。 杨贝尔等人[4]提出利用层次分析法计算各环境条件等级的加权系数, 从分级对抗环境中选取典型作战条件进行数字仿真试验, 加权求和得到抗干扰概率, 完成导弹综合抗干扰性能评估。 方丹等人[1]给出了一种对地面复杂干扰环境的红外成像导引系统抗干扰性能评估方法, 运用Bayes 估计的方法建立红外成像导引系统抗干扰概率计算模型。
目前, 导引系统的抗干扰性能评估指标往往采用制导系统的抗干扰概率进行评估[5-6], 该指标混淆了导引系统和制导系统的功能要求[7], 导引系统无法输出脱靶量等制导精度考核指标, 无法形成抗干扰概率, 该指标无法有效指导导引系统的抗干扰设计和评估。 在研制及训练过程中, 除了可生成脱靶量的靶试试验和内场数字、 半实物仿真试验外, 往往开展大量空中系留试验和导引系统内场测试试验。 由于内场试验无法生成脱靶量, 无法利用数字仿真、 半实物仿真及实弹靶试中的脱靶量等制导精度指标进行考核, 导致试验结果缺少合适的指标进行考核与评估, 无法与传统的基于制导精度的抗干扰性能评估方法进行融合, 造成系留试验及导引系统内场仿真试验数据的极大浪费。
本文基于导引系统输出的视线角速度这一重要量测信息, 重新定义导引系统抗干扰性能评估指标, 并以此为基础, 对系留试验中导引系统的抗干扰性能指标进行简化和等效设计, 该指标的设计基础为导引系统输出的测量误差, 因此, 其不仅可以应用于系留试验中导引系统的抗干扰性能评估, 也可以应用于内场数字、 半实物仿真试验及外场试验中的导引系统抗干扰性能评估。
1 导引系统抗干扰性能评估指标设计
导引系统主要由探测系统、 信息处理软件、 控制与跟踪系统组成。 探测系统接收来自外部的红外辐射, 形成数字灰度图像, 信息处理软件对图像进行处理, 实现目标的检测、 识别和跟踪, 提取目标在视场中的位置信号给控制与跟踪系统, 再利用该信号完成导引系统的控制与跟踪功能, 并向制导系统输出视线角速度用于形成制导信号。
导引系统在干扰的扰动下, 出现识别错误或跟踪被扰动, 导致其对目标的测量误差增大, 导引系统输出的视线角速度误差增大, 其测量的视线角速度与弹目实际的视线角速度不一致, 该变化量引起飞行控制系统的制导指令发生变化, 是制导系统制导误差的主要来源。 在抗干扰过程中, 制导精度决定导弹能否命中目标, 因此, 明确导引系统在干扰扰动过程中视线角速度误差对制导系统制导精度的影响机理, 是设计导引系统抗干扰性能评估指标的基础。
抗干扰过程中, 导引系统跟踪目标的典型过程是: 先跟踪目标, 干扰起燃后, 跟踪目标与干扰重合体, 目标与干扰分离后, 导引系统成功识别目标, 重新跟踪目标。 文献[7]中, 在导弹导引系统被干扰扰动过程中引入延时和擾动[8], 利用伴随分析方法[9], 通过以下公式描述视线角速度与制导精度之间关系, 即
令函数G表示为
函数G反映了导弹飞行过程中在不同时间点上, 导弹过载对制导精度的影响。
从式(2)可以看出, 随着弹道时间t的增加, 在相同的比例导引系数和制导时间常数下, 函数G的结果是非线性变化的, 因此, 在导弹飞行过程中, 相同过载对制导精度的影响也是非线性的, 其结果需要复杂的计算过程。
2 视线角速度精度的简化与等效测试
利用视线角速度精度能够有效考核导引系统的抗干扰性能, 但其存在难以计算的问题。 一方面, 制导系统需要给出全弹道过程中的视线角速度精度要求, 该值与弹道条件、 干扰投放策略及剩余飞行时间等诸多因素相关, 在多组干扰投放条件下, 视线角速度精度的分配方式较为复杂, 为了便于试验开展, 视线角速度精度的计算需要简化; 另一方面, 视线角速度精度的计算需要目标真实的视线角速度, 该值在数字仿真和半实物仿真中可以从仿真模型中计算, 但在系留试验和外场试验中, 无论是载机雷达还是地面雷达, 其测量的目标真实视线角速度精度远低于导引系统的测量结果, 无法精确反映导引系统测量的视线角速度精度, 需要计算视线角速度精度的等效测试量, 满足系留试验及外场试验中红外导引系统抗干扰性能的评估要求。
2.1 视线角速度精度的简化计算
导弹飞行中, 由于干扰投放时刻导弹剩余飞行时间的不同, 对导引系统视线角速度精度的要求也不一样, 为了便于测试, 对视线角速度精度按照剩余飞行时间进行分段设计,
由式(2)中的e-t/T可知, 当剩余飞行时间t与制导时间常数T的比值大于等于7时, e-t/T将接近于0, 如图1
所示。 函数G的计算趋于0, 视线角速度精度的要求趋于无限大, 即该情况下, 视线角速度误差对制导精度影响不大。
假设当剩余飞行时间t与制导时间常数T的比值小
式中: j为干扰投放点, j=1, 2, …, k。 式(5)利用干扰各个投放点函数G的最大值模拟干扰的扰动分布, 因此, 一般情况下, 该模型的视线角速度精度要求更高。
式(5)基于干扰投放时剩余飞行时间与制导时间常数的比值, 构造了简单的视线角速度精度要求的分段计算方法, 在比值大于等于7时, 对视线角速度精度不做要求, 只要导引系统不会始终跟踪干扰即可; 在比值小于1时, 飞行控制系统无法再响应导引系统信号, 因此, 对视线角度精度不作要求; 当7>t/T≥1时, 计算固定值作为视线角速度精度的要求, 在测试产品确定后, 制导时间常数T、 比例导引系数N均为已知, 接近速度Vc可以选择典型值进行估算。 式(5)给出了视线角速度精度的简单构造方法, 仅与干扰投放时机、 干扰投放颗数、 弹目交会方向相关, 便于指标的设计与测试, 可以在弹道条件确定后, 给出不同弹道剩余时间下对视线角速度精度的估算值。
2.2 视线角速度精度的等效测试
基于比例导引原理, 将视线角速度精度简化如式(5)所示, 相较于式(4), 简化公式便于测试, 能够在数字仿真、 半实物仿真和外场试验中评估导引系统的抗干扰性能。 但在系留试验中, 导弹随着载机进行运动, 不是基于比例导引的自主飞行, 真实的视线角速度是不断变化的, 不能简化处理, 无论是载机雷达还是地面雷达, 其测量的目标真实视线角速度精度远低于导引系统的测量结果, 无法精确反映导引系统测量的视线角速度精度, 需要计算视线角速度精度的等效测试量, 以满足系留试验中导引系统抗干扰性能评估的需求。
由于外场试验中, 真实的视线角速度无法提取, 因此, 将制导系统对视线角速度精度的约束转化为对视线角速度的约束, 将式(4)變更为
综合式(1)和式(6)可以看出, 对视线角速度有影响的是比例导引系数N、 制导时间常数T、 视线上的接近速度Vc及干扰引起扰动的不同时刻点ti, i=1, 2, …, 2k, 不考虑干扰之间的扰动叠加关系, 则与干扰投放颗数一致。 由于比例导引系数N、 制导时间常数T依据制导系统的性能确定具体参数, 视线上的接近速度Vc与目标和导弹飞行速度相关, 不便作为指标, 因此, 本文重点分析系留试验条件下, 干扰引起扰动的不同时刻点ti与视线角速度的关系。
在式(7)中, 取比例导引系数N为4, 制导时间常数T为0.5 s, 可得函数G与干扰引起扰动的不同时刻点ti的关系如图2所示。
由图2可以看出, 不同时刻点的扰动, 造成函数G的扰动幅度不同。 在剩余飞行时间为2.5 s时有一个扰动波峰, 在剩余飞行时间1.5 s以内, 扰动幅度迅速上升, 并在剩余飞行时间为0.5 s时达到整个弹道的峰值, 因此, 在上述时间点的扰动, 将造成函数G的扰动幅度增大; 同时, 导引系统输出的视线角速度也将增大, 造成制导精度迅速增大。 因此, 导引系统应尽量避免在上述时间点的跳动。
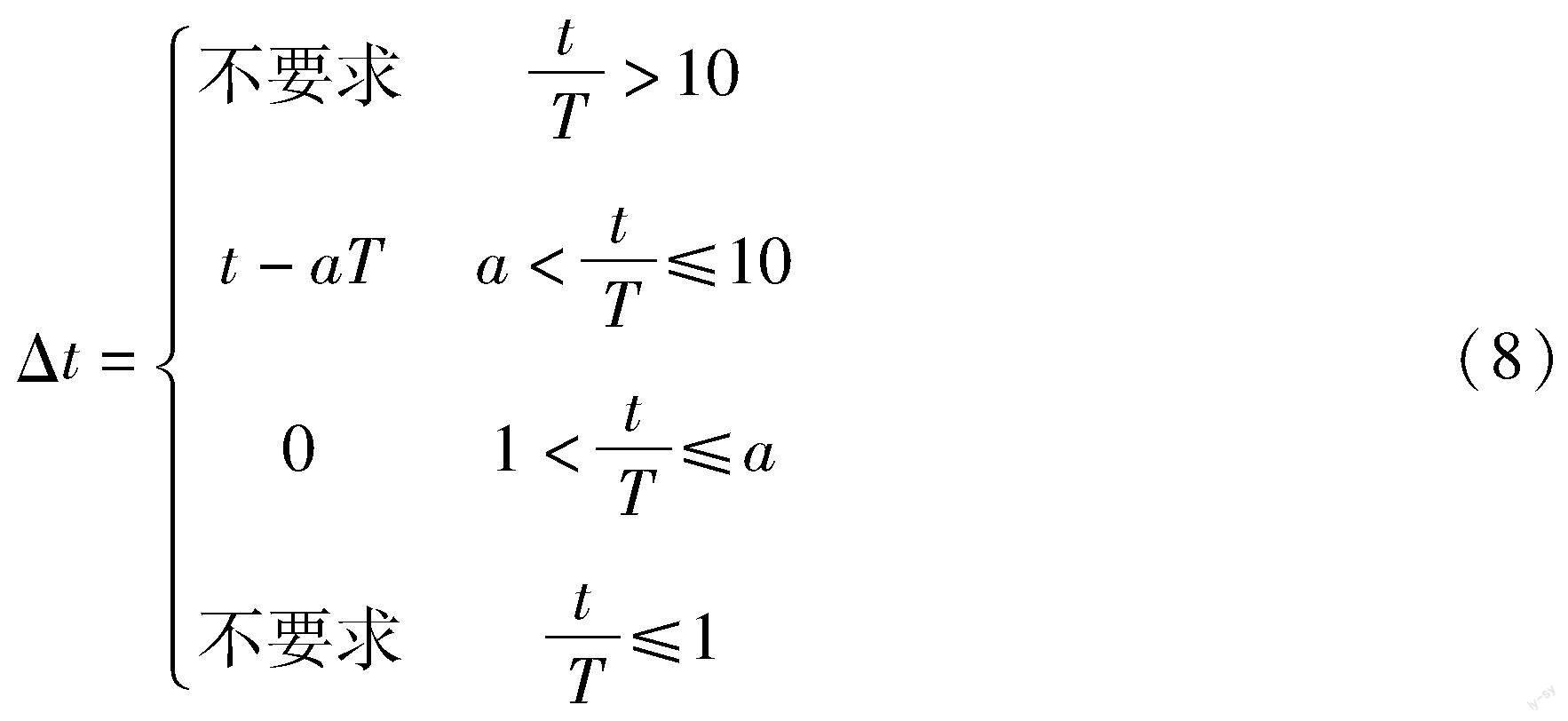
干扰投放后, 导引系统从跟踪目标变化为跟踪干扰与目标的重合体, 将造成扰动; 干扰与目标分离后, 导引系统识别并跟踪目标, 也将造成扰动。 因此, 扰动时间点主要由干扰投放时刻点和导引系统识别时间决定。 本文利用上述两个因素设计系留试验中视线角速度精度的等效测试指标:
式中: Δt为从干扰投放到导引系统识别出目标的时间; t为干扰投放时刻点, 其计算方式为同样对抗条件下, 导弹发射后的剩余时间; T为制导系统时间常数; aT为同样对抗条件数字仿真试验下, 在不同时刻点施加系留试验同等数量干扰扰动后, 脱靶量满足制导精度要求的扰动点最小剩余时间。
假设系留试验条件经数字仿真系统闭环仿真后, 经统计计算, a取值为2, 则干扰投放时剩余飞行时间(计算方式为同样对抗条件下, 导弹发射后的剩余时间)大于10倍制导时间常数时, 导引系统只要不一直跟踪干扰即可, 对识别时间没有要求; 干扰投放时剩余飞行时间介于2倍至10倍制导时间常数时, 导引系统需要在要求的时间内识别出目标; 随着剩余飞行时间的减少, 要求的识别时间也将减少, 识别时间不大于投放点剩余时间与2倍制导时间常数的时间, 避免扰动点均在2倍制导时间常数处产生; 干扰投放时剩余飞行时间介于1倍至2倍制导时间常数时, 该时间段内投放干扰, 有较大的概率造成脱靶量增大, 仅仅减少识别时间, 也不能满足制导精度要求, 导引系统需要在干扰与目标分离后即可识别出目标, 同时, 利用滤波、 预测等手段输出视线角速度, 降低干扰扰动的影响; 干扰投放时剩余飞行时间小于1倍制导时间常数时, 制导系统来不及响应导引系统信号, 对识别时间无要求。
综上, 本文基于制导系统误差传递原理, 以导引系统的测量误差为基础, 首先提出了基于视线角速度精度的导引系统抗干扰性能评估指标, 由于视线角速度真值无法在外场试验中获取, 因此, 本文基于比例导引原理, 提出了视线角速度精度简化计算方法, 且在系留试验中, 导弹不发射, 不符合比例导引原理, 因此, 本文提出了利用识别时间等效替代视线角速度的方法。
3 仿真分析
利用数字仿真系统及系留试验数据进行仿真分析。
系留试验条件为分别在弹目距离3 km, 2 km和1 km处投放10颗间隔0.8 s的红外诱饵弹。 干扰投放后, 导引系统均能正确识别出目标。
利用该导弹虚拟样机对相应的系留条件进行导弹发射状态下的闭环仿真, 计算不同弹目距离投放点对应闭环仿真条件下的剩余飞行时间, 统计在不同时刻点施加系留试验同等数量干扰扰动后, 脱靶量满足制导精度要求的扰动点最小剩余时间aT为1 s, 该导弹制导系统时间常数T为0.5 s, 则a为2。 依据式(8), 计算要求的识别时间及等效测试结果如表1所示。
上述结果表明, 该导弹系留试验结果中, 投放点1和投放点2的抗干扰能力满足导弹的制导精度要求, 尽管在投放点3正确识别出目标, 但由于干扰与目标粘连等情况, 其识别时间稍长, 其抗干扰能力不满足制导精度要求, 需要进一步提高导引系统近距目标识别的快速性, 以提升该导弹近距抗干扰能力。
4 结 论
本文基于制导系统和导引系统的功能需求差异, 分析了传统导引系统抗干扰性能评估指标的不足, 提出了基于制导精度传递规律的视线角速度精度分析方法, 将视线角速度精度指标作为导引系统的抗干扰性能评估指标, 并给出了该评估指标的计算方法、 简化测试方法及等效测试方法, 从而在导引系统研制过程中, 能够结合内外场试验过程, 及时对其抗干扰性能进行评估。
本文在揭示制导精度传递规律和指标简化设计时, 为使模型便于计算, 进行了多方面假设, 例如, 多干扰投放对制导精度的影响实质是一个复杂的相互影响过程, 本文将该过程简化为线性系统叠加。 在后续研究中, 应该结合具体数字仿真模型对计算过程进行改进。
参考文献:
[1] 方丹, 周永恒, 崔少辉, 等. 红外成像导引头抗干扰性能评估方法[J]. 火力与指挥控制, 2020, 45(6): 141-144.
Fang Dan, Zhou Yongheng, Cui Shaohui, et al. Research on Anti-Jamming Performance Evaluation Method of Infrared Imaging Seeker[J]. Fire Control & Command Control, 2020, 45(6): 141-144. (in Chinese)
[2] 王涛, 王祥. 红外导弹抗干扰能力多维度评估方法[J]. 红外技術, 2014, 36(7): 573-576.
Wang Tao, Wang Xiang. An Evaluation Method with Five Dimensions for Infrared Missile Anti-Jamming[J]. Infrared Technology, 2014, 36(7): 573-576. (in Chinese)
[3] 庞艳静. 基于层次分析法的某红外导弹的抗干扰性能评估[J]. 红外技术, 2014, 36(3): 234-237.
Pang Yanjing. Evaluation of Infrared Missile Anti-Jamming Performance Based on the Analytic Hierarchy Process[J]. Infrared Technology, 2014, 36(3): 234-237.(in Chinese)
[4] 杨贝尔, 王枫, 唐善军. 红外导弹分系统抗干扰能力指标体系研究[C]∥光学技术研讨会暨交叉学科论坛论文集, 2017: 282-291.
Yang Beier, Wang Feng, Tang Shanjun. An Anti-Jamming Performance Specification System for the Subsystem of IR Missile[C]∥Proceedings of the Optical Technology and Application Symposium and Interdisciplinary Forum, 2017: 282-291. (in Chinese)
[5] 马晓平, 赵良玉. 红外导引头关键技术国内外研究现状综述[J]. 航空兵器, 2018 (3): 3-10.
Ma Xiaoping, Zhao Liangyu. An Overview of Infrared Seeker Key Technologies at Home and Abroad[J]. Aero Weaponry, 2018 (3): 3-10. (in Chinese)
[6] 李萍, 张波, 尚怡君. 基于红外图像和特征融合的飞机目标识别方法[J]. 电光与控制, 2016, 23(8): 92-96.
Li Ping, Zhang Bo, Shang Yijun. Aircraft Target Identification Based on Infrared Image and Feature Fusion[J]. Electronics Optics & Control, 2016, 23(8): 92-96. (in Chinese)
[7] 张喜涛, 白晓东, 闫琳, 等. 红外空空导弹抗干扰性能评估指标体系研究[J]. 红外技术, 2020, 42(11): 1089-1094.
Zhang Xitao, Bai Xiaodong, Yan Lin, et al. Anti-Jamming Performance Evaluation Index System for Infrared Air-to-Air Missiles[J]. Infrared Technology, 2020, 42(11): 1089-1094. (in Chinese)
[8] 李炯, 張涛, 张金鹏, 等. 基于零效脱靶量的制导估计一体化方法[J]. 弹道学报, 2017, 29(4): 35-39.
Li Jiong, Zhang Tao, Zhang Jinpeng, et al. Unitization Method of Guidance and Estimation Based on Zero-Effort-Miss[J]. Journal of Ballistics, 2017, 29(4): 35-39. (in Chinese)
[9] Wang W Q, Jia X H, Fu K S, et al. Guidance Precision Analysis Based on Airborne IRCM Stochastic Process[J]. Infrared Technology, 2019, 41(2): 163-170.
Research on Evaluation Index of Anti-Jamming Performance of
Guidance System Based on Line-of-Sight Angular Velocity Accuracy
Abstract: In response to the problem that traditional anti-interference performance evaluation indices are concentrated at the level of missile guidance systems, which cannot meet the anti-interference performance evaluation of guidance systems, based on the analysis of the internal error transmission principle of guidance systems during the anti-interference process and the measurement error of guidance systems, this paper proposes a guidance system anti-interference performance evaluation index based on line of sight angular velocity accuracy, so as to evaluate its anti-interference performance timely in the development process of guidance systems.Due to the difficulty for measurement of the line-of-sight angular velocity accuracy in field experiments, in order to improve the testing efficiency, a simplified calculation method for line-of-sight angular velocity accuracy is proposed based on the principle of proportional guidance. Furthermore, for non proportional guidance scenarios, an equivalent testing method for line-of-sight angular velocity accuracy using recognition time is given. The results of field data testing indicate that the indices can reflect the anti-interference performance of missile in different scenarios, and this method has certain rationality.
Key words: line-of-sight angular velocity; anti-jamming; guidance system; recognition time; performance index; missile