基于知识图谱多集池化的健康状态智能评估方法
2024-04-10张元鸣肖士易徐雪松程振波
张元鸣,肖士易,徐雪松,程振波,肖 刚
(浙江工业大学 计算机科学与技术学院,浙江 杭州 310023)
0 引言
随着装备复杂程度和自动化程度的日益提高,科学有效地监测装备与核心部件(如发动机、曳引机等)的健康状态,对于保障装备安全性和降低装备维护成本具有重要的科学意义,在航空航天、军用装备以及特种设备等领域表现出良好的应用前景。健康状态评估是诊断、预测和健康管理(Diagnostics,Prognostics and Health Management, DPHM)的关键技术之一[1],旨在利用传感器采集的大量监测数据、信息以及先验知识,评价装备的健康工作状态,对故障率、可靠性进行估计,为及时采取预测性维护措施提供重要依据。
根据采取的评估策略,健康状态评估方法可分为模型驱动方法[2]和数据驱动方法。模型驱动方法是根据降级原理设计基于物理的数学模型[3],尽管可以获得理想精度,但难以考虑运行过程中的各类复杂因素。随着传感器在状态监测方面的广泛应用,数据驱动方法已成为健康状态评估的主流,按照评估模型的不同可以分为基于统计的方法、基于传统机器学习的方法和基于深度学习的方法。基于统计的方法通常需要足够的先验知识来构建状态评估模型,准确性差,且不具有通用性。基于传统机器学习的方法依赖人工提取特征,数据拟合能力不足,泛化能力差。随着监测数据体量的不断增长和数据处理能力(如采用图形处理器(Graphic Processing Unit,GPU))的快速提升,基于深度学习的方法由于具有很强的数据分析能力和泛化能力而受到广泛关注,在大量监测数据驱动下采用卷积神经网络(Convolutional Neural Network, CNN)、长短期记忆网络(Long Short-Term Memory Network, LSTM)等深度神经网络模型自动学习蕴藏在监测数据中的关联知识,建立监测数据与健康状态之间的非线性数学模型,可以任意精度逼近任意连续函数,实现复杂高维函数的近似表示,学习过程不依赖于专家经验和知识,能够实现健康状态的端到端学习[4]。
但是,现有基于深度学习的方法往往仅能够提取监测数据中时间域的特征信息,忽略了监测数据空间域的特征信息[5]。例如,涡扇发动机监测数据(速度、温度、压强等)一方面随时间表现不同变化性特征,另一方面监测数据间还存在相应的空间依赖关系。针对该问题,基于图神经网络(Graph Neural Network,GNN)的方法成为当前研究的热点,这类方法根据监测数据生成图数据模型,在非欧数据空间同时提取时空特征信息。例如文献[6-9]通过K最近邻(K Nearest Neighbors, KNN)、水平可视图(Horizontal Visibility Graph, HVG)或结构分析法生成关于监测数据的同质图,利用图卷积网络(Graph Neural Network, GNN)[10]和图注意力网络(Graph Attention Network, GAT)[11]进行特征提取。
现有从监测数据中生成的图数据只考虑了监测数据自身的空间依赖关系,还没有对装备部件和监测数据间的多种类型的空间依赖关系进行建模,也没有融合相关的先验知识,还不能全面刻画这些异质数据的依赖关系。为此,本文将知识图谱引入健康状态图数据模型中,构建了一种可深度融合部件数据、监测数据和先验知识的健康知识图谱。在此基础上,利用知识图谱图池化技术将健康知识图谱时空特征信息嵌入到图级的表示向量,在图表示学习基础上进行健康状态分类。本文的主要贡献包括:
(1)提出了基于知识图谱的健康状态图数据模型,该模型能够深度融合部件数据、监测数据和先验知识等时空特征信息,为健康状态评估提供结构化异质语义知识库。
(2)提出了基于图多集池化的健康状态评估模型,通过图卷积网络、图多集池化和自注意力机制将健康知识图谱的整体时空特征嵌入到低维向量空间,实现了基于表示学习的健康状态智能评估。
(3)在公开的发动机数据集上对所提方法进行了量化评价,证明了该评估方法的有效性、正确性和稳定性。
1 相关工作
本章主要介绍基于深度学习[12]和基于图神经网络的健康状态评估的相关工作,阐明健康状态评估的研究趋势和本研究的特色。
1.1 基于深度学习的评估方法
随着监测数据体量的不断增加和计算机算力的持续提升,基于深度学习的评估方法成为健康状态评估的主流技术,国内外研究者提出了多种健康状态评估模型,如卷积神经网络(CNN)、长短期记忆网络(LSTM)、贝叶斯神经网络(Bayesian Neural Networks,BNN),以提高健康状态评估的智能化水平[13]。
CNN模型是深度学习中最具代表性的算法之一,主要包括卷积层和池化层,卷积层将多个卷积滤波器与输入数据进行卷积生成特征图,对高维输入数据进行降维处理,可以自动提取有效的特征;池化层对各个维度数据进行采样,进一步降低数据规模并提高网络泛化能力。陈仁祥等[14]提出基于电压信号深度特征学习的谐波减速器健康状态识别方法,利用CNN模型对电压信号时频信息进行自学习,在获得减速器不同健康状态下电压信号深度特征的同时实现对其健康状态的识别。吴继春等[15]使用解剖学约束神经网络(Annularly Convolutional Neural Networks, ACNN)对不同状况下刀具振动信号分解出故障信号特征,再通过时频分析生成时频图进行学习,实现对刀具磨损状态评估。沈涛等[16]采用批标准化(Batch Normalization, BN)的CNN-LSTM混合模型实现对多种模式和故障下的旋转机械健康状况诊断。
LSTM模型是一种特殊的循环神经网络模型,通过遗忘门、记忆门和输出门解决了长序列训练过程中的梯度消失和梯度爆炸问题,能够在更长的时间序列中有更好的表现。HUANG等[17]提出一种基于双向LSTM的预测方法,将多个传感器数据与操作条件数据集成并学习到高级的特征,通过全连接层和线性回归层堆叠生成预测的目标输出。彭成等[18]利用LSTM编解码器获取轴承时序特征并融合空间特征,实现了滚动轴承的不同位置和故障的分类识别。ZHENG等[19]提出一种长短期记忆(LSTM)网络,充分利用传感器序列信息,并在多种环境条件和故障模式下学习传感器数据中的隐藏特征,结果优于传统的数据驱动方法。ELLEFSEN等[13]在半监督设置下训练LSTM模型用于涡扇发动机退化预测。ZHAO等[20]利用胶囊网络提高了LSTM的表示能力,提高了健康评估的精度。
BNN模型进一步在深度神经网络的隐藏层中引入了基于高斯分布的不确定性并正则化,优化网络的权重的均值和方差,有效解决了过拟合的问题,并在输出层中进行多次采样,对结果的误差进行有效预测。PAN等[21]将深度BNN模型提取结构信息和概率确定结构条件,解决了对结构件的健康度评估中由于操作、损坏和噪声干扰而导致的结构不稳定和不确定性问题。耿苏杰等[22]使用模糊函数融合贝叶斯网络对电力设备进行故障诊断状态评估。PENG等[23]提出了采用变分推理BNN模型进行知识推理,提高了健康状态评估的可扩展性和泛化能力。
1.2 基于图神经网络的评估方法
传感器监测数据是一种欧式空间数据,传统深度学习模型只能够提取其中的时间域特征信息,因而近年来基于图神经网络(GNN)的诊断、预测和健康管理(DPHM)成为新的研究热点,主要围绕监测图数据建模与图特征提取展开研究。针对图数据建模方法,LI等[24]提出了KNN、Radius和Path三种图数据生成方法,并研究了图卷积网络(GCN)、图注意力网络(GAT)、图同构网络(Graph Isomorphism Network, GIN)等7种GNN模型提取图数据特征的方法。HE等[6]提出一种面向电信网络的故障诊断方法,通过网络的嵌入表示来聚合整个图的信息,利用GNN诊断设备故障并进行定位。LI等[7]提出了基于可见性图的轴承故障分类模型,通过水平可视图(Horizontal Visibility Graph,HIG)算法将监测数据转换为保持不变动态特性的图,并通过GNN进行特征学习和故障分类。CHEN等[8]提出一种基于关联图的故障诊断模型,使用结构分析将故障预诊断,结果转化为关联图,再通过GCN进行特征分析和诊断。KHORASGANI等[25]提出了基于加权无向图的故障诊断模型,根据监测数据构建加权无向图结构,使用GNN检测和隔离故障组件。ZHAO等[26]提出了基于图卷积深度置信网络的机电系统智能故障诊断方法,利用标记和未标记的样本来设计自适应局部图学习方法来建模图邻居关系,并在半监督学习框架下进行故障诊断。
根据已查阅的文献,当前基于图神经网络的健康状态评估成果较少,尤其缺少知识图谱和图神经网络相结合的研究成果。为此,本文通过知识图谱深度融合了监测数据、部件数据和先验知识等不同类别异质数据,能够完备刻画不同类别数据的时空依赖语义关系,并利用图神经网络得到图谱整体时空特征的隐向量表示,再通过向量学习实现健康状态的智能评估。
2 健康知识图谱模型
知识图谱通过结构化方式描述客观世界中概念、实体、属性及其联系,本质上是一个大规模结构化语义网络,一般通过(实体,关系,实体)或(实体,属性,属性值)三元组方式表示。为了刻画与健康状态相关的数据与知识间的关联关系,首先定义了健康知识图谱本体模型,其定义如下:
定义1健康知识图谱本体。健康知识图谱本体是用来描述装备的部件组成和监测传感器的模式结构,主要包括部件实体、传感器实体、相关属性以及它们之间的关联关系。
工程领域的先验知识是指领域专家根据多年实践总结得到的各实体间的相互关系的知识,可以反映不同实体间的影响关系,如零部件间的能量传递、控制关系、依赖关系等,零部件与监测指标间的依赖关系以及监测指标间的依赖关系和重要程度等。健康知识图谱融合了相应的先验知识,在不同类别的实体之间建立联系,保证知识图谱模型的正确性和准确性。健康知识图谱本体刻画了各类数据与知识的静态依赖关系,包含了相关先验知识。如图1所示为涡轮发动机的健康知识图谱本体,该图谱包括了发动机部件间的关联关系,如核心机、燃烧室、风扇、涡轮机、压气机5个部件的关联关系,以及部件与相应传感器的关联关系,如燃烧室具有燃烧温度、燃控比和进口压强3个传感器;同时也描述了不同传感器之间的关联关系,其三元组形式如表1所示。
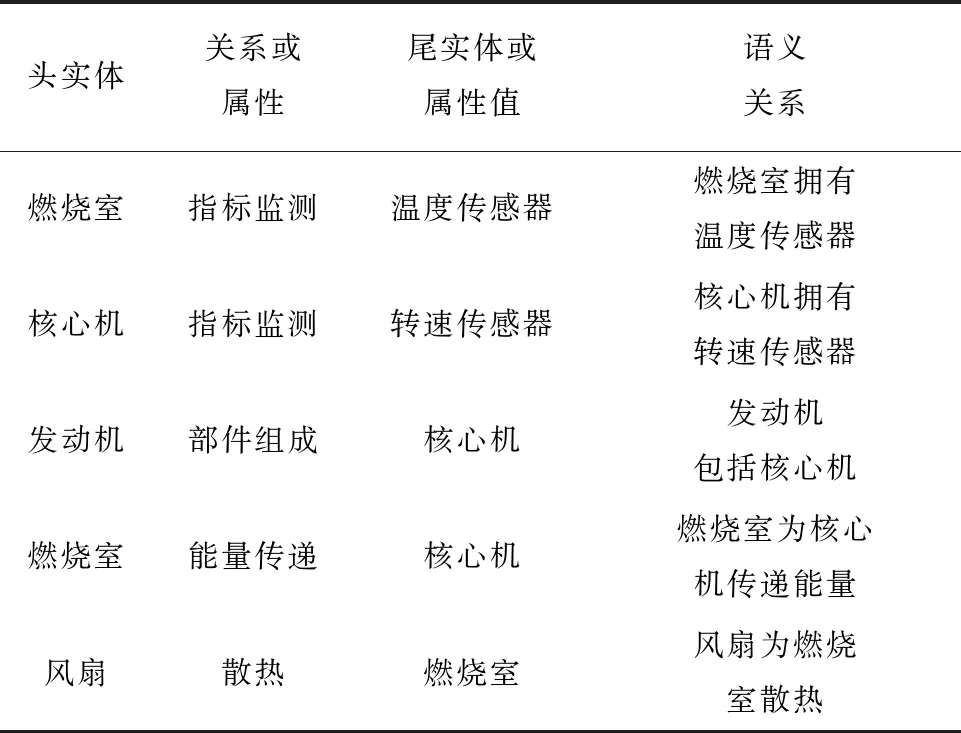
表1 健康知识图谱本体模型三元组
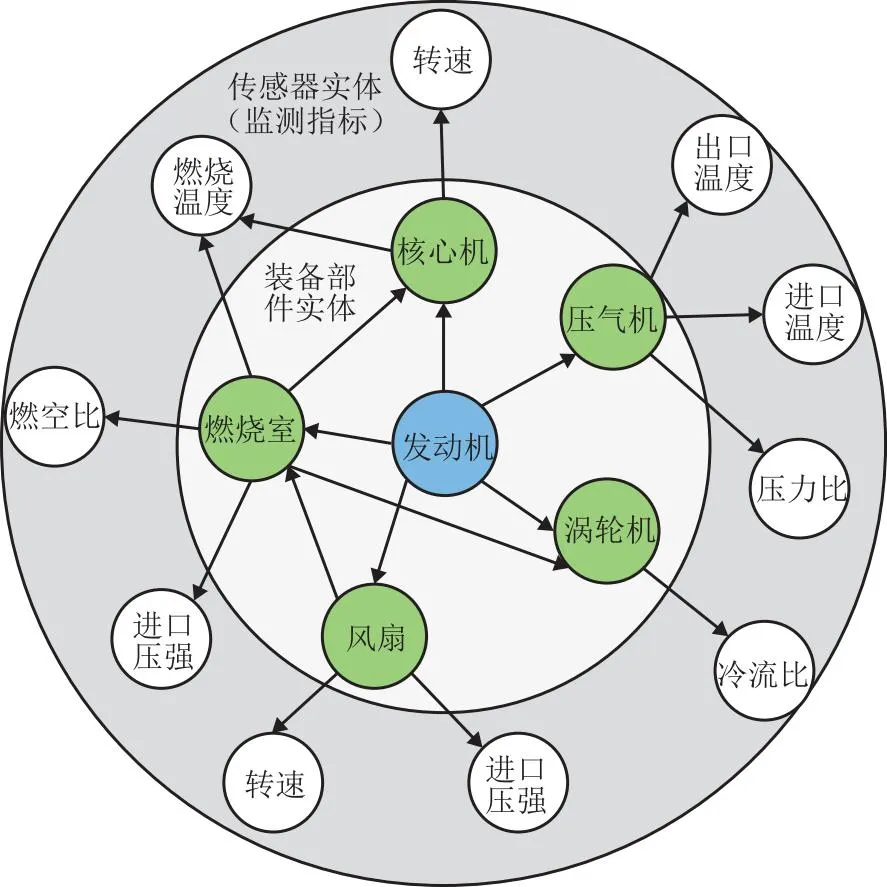
图1 健康知识图谱本体
根据健康知识图谱本体和传感器采集的监测序列数据,可以构建带时间标签的健康时序知识图谱(Health Temporal Knowledge Graph,HTKG),用来描述装备部件一段时间内部件状态、监测值和先验知识间的关联关系,其定义为:
定义2健康时序知识图谱。健康时序知识图谱可以表示为一个图谱集合G={Gt1,Gt2,…,Gtn}。其中Gti=(E,R,S),E={e1,e2,…,en}表示ti时刻部件的健康状态和相应监测值集合;R={r1,r2, …,rm}表示带时间标签的二元关系集合,用来描述ti时刻部件健康和监测值之间的依赖关系;S⊆E×R|ti×E函数表示ti时刻的三元组集合;t1表示开始时间,tn表示结束时间。


表2 健康时序知识图谱三元组
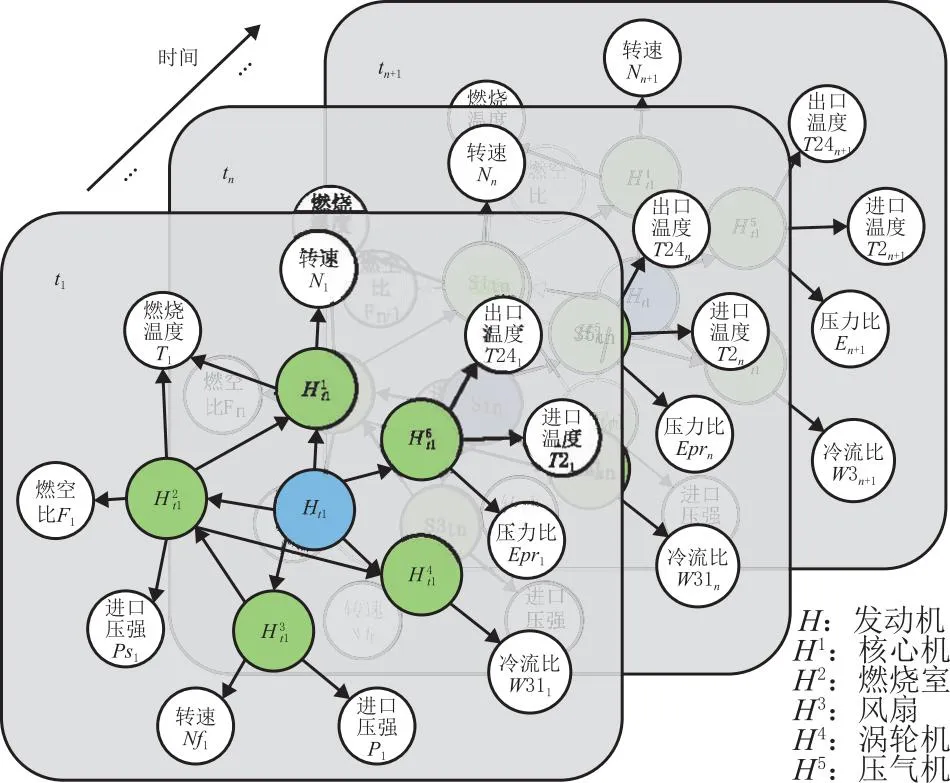
图2 健康时序知识图谱
3 基于图多集池化的健康状态评估模型
健康时序知识图谱以自然的方式建模了部件健康状态、监测值等数据间的多种类型的关联关系,有效融合了健康状态的时空特征。在此基础上,本章利用图池化技术将健康知识图谱的整体时空特征嵌入到低维的向量空间,通过建立学习表示向量和健康状态的映射关系,将健康状态评估问题转换为基于图表示学习的分类问题,实现健康状态智能评估。
3.1 评估模型框架
为了充分学习健康知识图谱的时空特征信息,本文设计了基于图多集池化的健康状态评估模型,将每一时刻的健康知识图谱的整体特征信息通过图池化的方式嵌入到低维的向量空间,得到一组离散的向量表示,再根据向量表示进行分类。图3给出了评估模型框架,首先,将某一时刻的健康知识图谱输入到图卷积网络(GCN)层,学习健康知识图谱的节点特征信息和拓扑信息,得到节点的向量表示;其次,经过第一级图池化(graph pooling)层,它以节点向量表示作为输入,依据相似性和相关性划分原则将节点划分为多重集合(multiset)[27],再将这些多重集合内节点的特征进行池化,得到一个新的超节点(子图级)的向量表示,同时学习集合内的关键节点;第三,经过一个自注意力(Self-attention)层,学习超节点之间的内在关联关系,并更新得到新的超节点的特征表示;第四,将新的超节点的特征表示输入到第二级图池化层块,将超节点的特征表示进一步聚合生成整个图的特征表示,该特征表示即为健康知识图谱的图向量表示;最后,将图向量输入到一个由多层感知机(Multilayer Perceptron,MLP)构成的全连接层,使用线性分类器对图向量表示进行分类,其输出是当前时刻装备的健康状态。
3.2 节点级特征嵌入
GCN通过消息传递可以聚合节点及其邻接点的特征信息,得到节点的特征表示,其聚合和更新公式为:
(1)
H(l+1)=GNN(H(l),A(l))。
(2)
节点特征嵌入一般需要堆叠两层GCN以构建深层学习网络,通过逐层递进的消息传递以考虑节点的关联性,得到节点的特征表示,计算公式为:
Encoder(X,A)=GCN2(GCN1(X,A),A)。
(3)
其中,X为特征矩阵,A∈RN×N为邻接矩阵,GCN1为第一卷积层,GCN2为第二卷积层。
3.3 图级特征嵌入
图池化本质上是融合节点信息和拓扑信息的图粗化的过程,基于上节得到的节点特征向量,根据节点相似性利用不同类别的图池化方法(如最大池化、求和池化和均值池化等)进行图级特征嵌入。为了在图池化时融合节点的局部结构信息,并学习关键节点的权重信息,本文采用图多集池化方法[28],其过程如图4所示,利用图多头注意力机制得到节点特征的相似性和相关性,形成可聚类的节点簇,即多集;按多集进行压缩,将集合中的节点聚合为一个新的超节点,聚合得到的超节点构成一个新的图;超节点经过一个自注意力模块学习超节点内在的关联关系,得到一个新的超节点向量表示。图多集池化能够克服简单池化在识别关键节点方面的不足,且可以选择邻居节点并识别影响健康状态的关键节点。
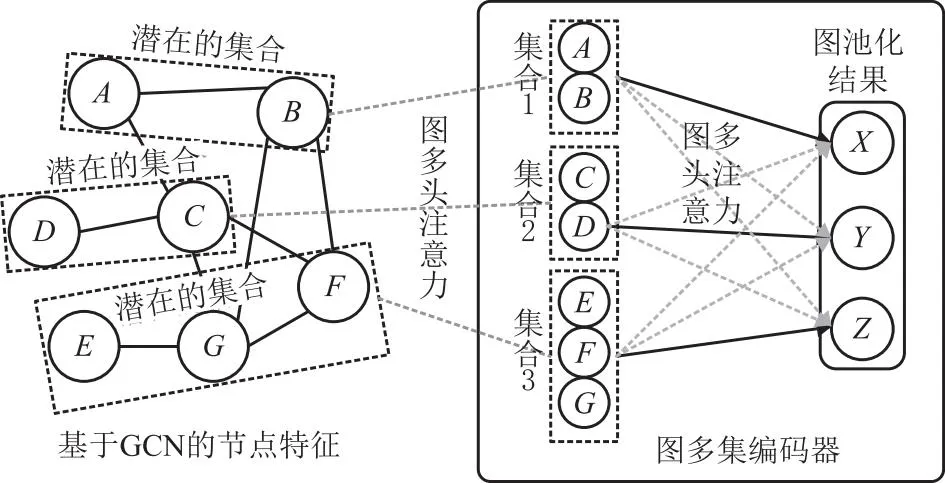
图4 图多集池化过程
图多集池化过程为:
Pooling(H,A)=
GMPool2(SelfAtt(GMPool1(H,A)),A′)。
(4)
其中:GMPool1为第一级图池化层;SelfAtt为自注意力层,能够更精确地得到超级节点之间的关联关系;GMPool2为第二级图池化层,其输出是图级的特征表示;H为节点的特征向量;A为邻接矩阵;A′是经第一次图池化后的超级节点的邻接矩阵;Pooling(H,A)是健康知识图谱的向量表示,目的是学习各个节点的注意力系数,上述图池化层融合了图多头注意力机制。
自注意力机制的公式为:

(5)
其中:矩阵Q∈RNq×dk,矩阵H∈RN×dk,矩阵A∈RN×dv,N为节点数,dk为节点向量的维度,dv为邻接矩阵A中向量的维数,矩阵Q中每一行代表种子节点的向量表示,数量为Nq,矩阵H中每一行代表节点的向量表示。将注意力函数分解成种子节点特征表示与所有原始节点特征表示的点积,可以学习到所有节点的注意力系数并将N个节点压缩成Nq个超级节点,其中ω是激活函数softmax,exp是自然常数e的指数。
实际上,式(5)根据节点拓扑关系的权重映射矩阵,学习矩阵Q、H、A得到带注意力权重的节点特征向量,并进行压缩得到超级节点,让网络在进行编码学习时尽可能地只关注最重要的部分。在上述单注意力的基础上,进一步使用多头注意力考虑节点间的全局依赖性,引入调整矩阵W并生成多个Q、H、A,多头注意力函数为:

(6)

图多头注意力函数使用可以聚合邻接信息的GNN非线性地学习Q、H、A来更准确生成投影的权重矩阵,多头注意力函数为:
(7)
相比于式(7)中线性嵌入的方法HW和AW,式(8)中的GNNi可以学习图的拓扑信息,能够更容易地学习到相关性大的节点,以此作为多集划分的依据。
多集图池化的公式可以表示为:
GMPool(H,A)=LN(Z+rFF(Z));Z=LN(S+GMH(S,H,A))。
(8)
其中:rFF为所有行方向的前馈层,独立并相同地处理每行特征;LN为层归一化层;S∈Rk×d为参数化后的节点集合矩阵;GMH函数考虑了矩阵S中的k个种子节点和N个节点的交互关系以及注意力相似度,将N个节点压缩为k个超级节点;GMPool得到节点集合图池化后的向量表示H′。
因为多集图池化仅仅学习了池化之前节点和池化之后超级节点之间的关系,未考虑超级节点之间的关系[29],所以在第一级图池化完成之后,增加了一个自注意力模块,该模块利用多头注意力机制学习超级节点间的全局依赖关系,自注意力函数为:
SelfAtt(H)=LN(Z′+rFF(Z′));Z′=LN(S+MH(H′,H′,H′))。
(9)
该函数用H′替换了式(6)中的Q和A,以学习池化后超级节点内部之间的关系,可以得到自注意力学习后的向量表示。
3.4 模型训练
通过两级图池化可以得到每一时刻健康知识图谱在向量空间中的特征表示,将该向量输入到一个全连接MLP层,通过Sigmoid线性分类器在向量空间进行分类,得到健康状态评估的概率r′,定义如下:
r′=sigmoid(Z)。
(10)
其中:sigmoid()函数将图级的特征表示映射到[0,1]范围内,输出健康状态类别的概率。
根据上述计算出的概率r′通过损失函数与样本中正确的标签r进行损失计算,并通过Adam优化器来最小化损失函数,损失函数定义为:
(11)
其中|O|为样本数总数。
通过不断迭代训练使健康状态的嵌入表示收敛,得到最终的装备健康状态评估训练模型。
4 实验评价
本章在公开的数据集上对本文提出的健康状态评估模型进行量化评价,介绍了数据集以及数据预处理方法,给出了实验结果,并通过消融实验评价了模型中各个模块对健康状态评估结果的影响。
4.1 实验数据集
本实验采用NASA公开的涡扇发动机数据集,该数据集使用商用模块化航空推进系统仿真工具(Commercial Modular Aero-Propulsion System Simulation, C-MAPSS)生成,其中包括不同工况和不同故障模式下的四个退化数据集,每个数据集包含一个训练集和一个测试集,训练集包含在不同的运行条件和故障模式组合下多台发动机从运行到故障的退化过程数据,测试集包含每台发动机在特定退化阶段的数据。CMAPSS数据集的概要描述如表3所示,21个传感器监测数据项如表4所示,监测数据还与相应发动机的单元数、操作周期和3个设置参数相关。
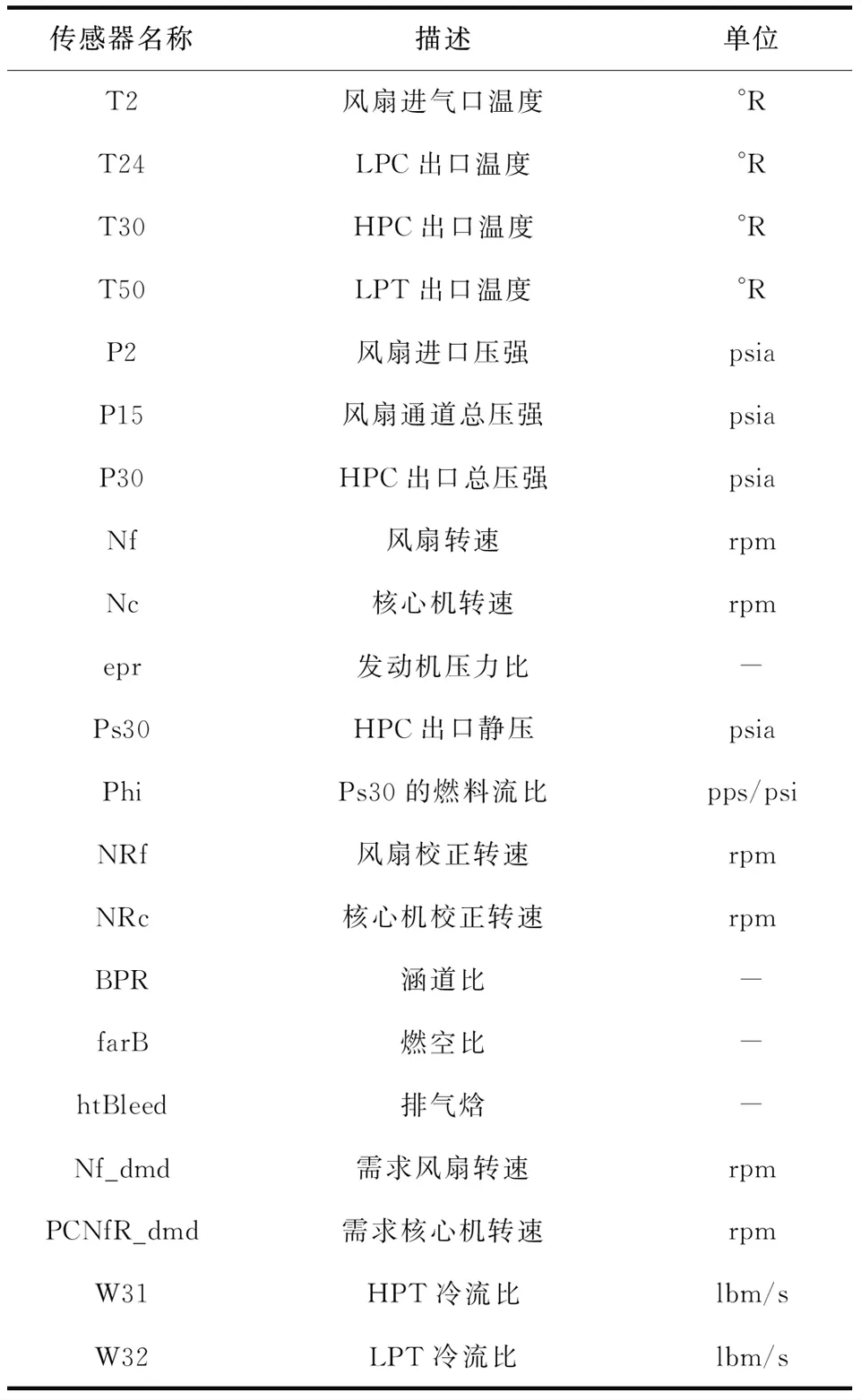
表4 数据采集传感器
每台发动机启动时都有不同程度的初始磨损和制造变化,这些变化未知且被认为是初始健康度,在数据集中其剩余使用寿命被标记为“131”,随着时间的推移,发动机单元开始退化,直到达到系统故障,即最后一条数据对应于发动机退役状态,其剩余使用寿命被标记为“1”。本实验采用分段线性标记方法[30]将剩余使用寿命区划分为健康、良好、亚健康和病态4个等级。实验任务是根据各类数据和知识对发动机的健康状态进行分类,采用ROC-AUC以及微平均的F1 Score/准确率作为评价指标(多分类情况下准确率和F1 Score相等),计算公式如下:
(12)
(13)
其中:K为类别数;TP,FP,TN,FN分别表示真正例(预测正确的正例)、假正例、真负例(预测正确的负例);假负例;i表示类别;Total为样本总数;Pmicro为微平均的精确率;Rmicro为微平均的召回率。
4.2 实验数据处理
(1)数据筛选 尽管数据集中记载了21个传感器的监测数据,但有些监测数据在退化过程中是恒定不变的,如T2、P2、P15、epr、farB、Nf_dmd和PCNfR_dmd等监测数据,在实验中剔除了这些监测数据,因而共有14个传感器的监测数据被用来构建健康知识图谱[31]。
(2)数据归一化 将监测数据在[0,1]内执行归一化,从而将不同类别的监测指标映射到统一的区间,消除指标之间的量纲以及奇异样本数据间不可比较导致的影响,以提高模型的精度和收敛速度,归一化公式如下:
(14)

(3)时间滑窗处理 对于时序数据,时间滑窗处理通常比单时间步长能够获得更多的特征,收集多变量时序数据在时间滑窗内的数据特征,形成高维特征向量。如图5所示为14个传感器监测数据归一化之后的数据样本,图中的滑动时间窗口大小为30个周期,可以得到发动机在当前滑动事件窗口的监测数据高维特征。

图5 大小为30的时间滑窗示意图
(4)健康时序知识图谱构建 根据健康时序知识图谱建模方法,将14个传感器的监测数据与发动机的15个部件以及先验知识进行融合,构建得到发动机的健康时序知识图谱。该图谱蕴含了发动机健康状态的时间域信息,同时也融合了部件与部件、部件与监测数据以及监测数据与监测数据3种类型的空间域信息。 针对图谱的异质性,本文将不同类别的节点转换到公共的向量空间,完成节点特征域对齐,并按规则初始化关系的权重矩阵,这样可以优先对邻居节点的特征按照权重矩阵进行特化学习,节点按规则进行特征聚合。
4.3 实验结果
在Pytorch深度学习框架上实现了本文提出的健康状态评估模型,运行环境CPU是Intel Xeon E5-2680,显卡是NVIDIA TITAN Xp,内存大小是94 GB。评估模型的池化层设置为2,batch_size设置为128,时间窗大小设为30,dropout_rate设为0.3,采用Adam优化算法进行小批量更新。训练时,随机抽取10%的原始训练样本作为验证集,样本被随机分为多个小批次进行训练,根据每个小批量的平均损失函数优化网络各层的权重,batch_size的大小将影响网络训练性能[32]。训练的前100个周期学习率设置为0.005进行快速优化,之后使用0.000 5的学习速率来稳定收敛,默认的最大训练周期数为300,并根据验证集的实时性能判断停止训练的时机,每个实验重复10次以增强实验结果的可靠性。
表5给出了不同滑动窗口情况下FD001数据集的健康状态评估的ROC-AUC、F1 Score和平均训练时间。结果表明,随着滑动窗口的增加,ROC-AUC和F1 Score的值先增加后减少,当滑动窗口大小为30时,实验结果最好,此时健康状态分类的ROC-AUC达到0.987 1,F1 Score的值为0.827 1,平均训练时间为1 200s。
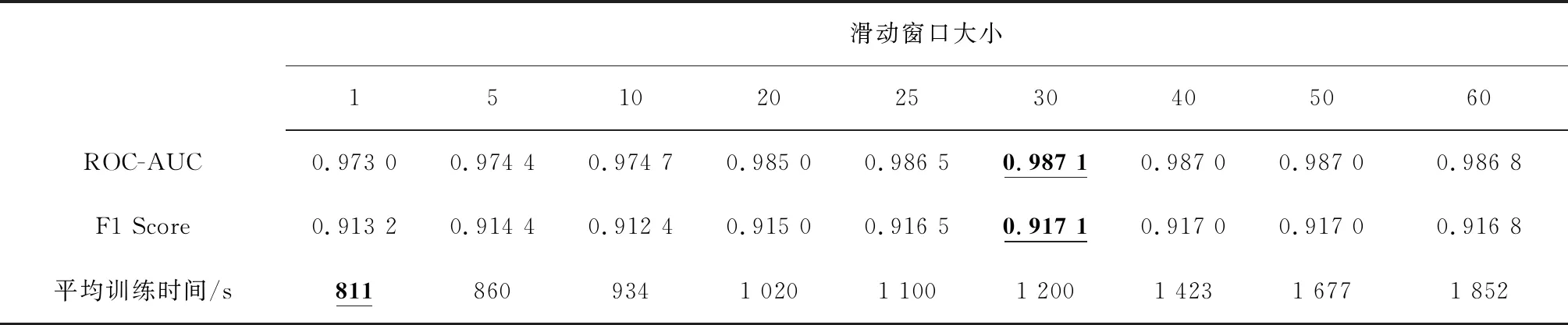
表5 滑动窗口大小对健康状态评估实验结果影响
进一步地,如图6所示为学习速率、Batch_size和Dropout_rate三个重要参数对健康状态评估结果的影响。可以看出,学习率为5e-4,Batch_size为128,Dropout_rate为0.3时可以在较少资源消耗的情况下得到最好的评估准确率。
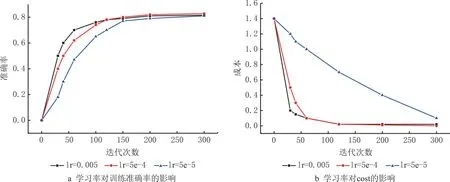
图6 模型参数对性能的影响
为了评估模型中图多集池化方法的优势,本文将图多集池化与其他评估方法进行了对比分析。表6给出了不同评估方法的对比实验结果,其中:MeanPool是一种常规的对邻域特征点求平均的图池化方法,SAGPool[32]是一种使用图卷积来获得节点的重要性的图池化方法,TopKPool[34]是一种使用投影向量分数筛选重要节点的图池化方法,DiffPool[35]是一种学习图的层次结构信息的图池化方法,并能得到较好的效果,EdgePool[36]是一种基于边收缩的图池化方法。实验结果表明,多集池化方法的性能显著优于其他图池化方法,只是训练时间较长,主要原因是图多集池化技术采用了Transformer多头注意力机制,并使用了非线性计算注意力参数Q、K和加权求和参数V得到更好的结构信息,相较于其他池化方法对节点打分并计算池化矩阵的方式,图多集池化需要花费更多时间计算更复杂的注意力矩阵来得到更准确的特征向量,同时还增加了节点的自注意力层来学习池化后的节点关系。基于纯数据特征的DCNN方法在复杂工况环境下(FD002和FD004数据集)性能下降明显,抗扰性能较差。GMPool-KNN表示其数据模型是通过KNN算法生成的联通图,其在各个数据集上的性能不如GMPool-KG,这表明健康知识图谱能够提供更丰富的时空特征信息,拥有更好的性能和抗扰性。
4.4 消融实验
进一步通过消融实验分析图卷积操作、图注意力机制、自注意力机制对本评估模型性能的影响,实验结果如表7所示。可以看出,模型在缺少图卷积操作时分类准确率降低到了91.02%,表明模型缺少图卷积操作将无法更有效地提取节点级特征;模型在缺少图注意力机制分类准确率时降低到了88.34%,表明缺少了图注意力机制将难以学习多集结构的特征;模型在缺少自注意力机制时准确率降低到了86.13%,表明缺少了自注意力机制将难以学习节点间的关联关系。

表7 健康状态评估消融实验
通过减少样本数量进一步分析小样本情况下模型评估的精确度并在FD001数据集上进行实验。为每个健康状态类型分别设置1个样本、2个样本和3个样本,作为训练数据集。图7给出了在小样本情况下滑动窗口大小与评估准确率、训练时间的关系,在滑动窗口从1增加到30时,准确率逐渐提高,训练时间也随之增加;但是,当滑动窗口超过30时,准确率并没有进一步提高,训练时间却显著增加。当滑动窗口为30时,单样本时的准确率为72.31%,双样本的准确率为72.49%,三样本的准确率达为73.19%。该结果表明,本模型在小样本情况下也可以较好地学习多集结构和节点间关系,从而为小样本情况下健康状态评估提供了有效支持。

图7 小样本情况下健康状态评估模型的性能
5 结束语
健康状态评估对于提高装备的安全性和可靠性具有重要意义,同时也能够为预测性维护提供重要依据。针对传统深度学习模型难以提取部件数据、监测数据和先验知识的空间特征信息的问题,本文提出了一种基于知识图谱多集池化的装备健康状态评估方法,将部件数据和监测数据等通过知识图谱进行深度融合,建立了健康时序知识图谱数据,从静态和动态两个方面全面刻画不同类型数据和知识的时空特征信息。在此基础上,提出了基于图多集池化的健康状态评估模型,利用图池化技术将健康知识图谱的时空特征信息整体嵌入到一组带时间标签的低维向量表示空间,将健康状态评估问题转化为基于表示向量的图分类问题。在公开的航空发动机数据集上对本方法进行了评价,取得了较高的健康状态评价性能,在小样本情况下也表现出良好的效果。
图神经网络在健康状态评估等方面具有潜在的应用前景,未来可以在以下几个方面进行更深入的探索:①构建更完善的健康知识图谱,可尝试将更多的先验知识融合到知识图谱中,包括指标重要程度、指标异常范围、故障与部件的关系等;②增强健康状态评估的可信性,通过图神经网络特征学习能力与知识图谱节点与边的链接关系,进一步探索健康评估的可解释依据;③拓展应用领域,将图神经网络应用于其他相关领域,如环境监测[37]、污染防治[38]等,提高状态监测的智能化程度。