基于多模态感知的变电站智能巡视技术
2024-04-09吴碧海王超魏嘉隆裴星宇
吴碧海,王超,魏嘉隆,裴星宇
(南方电网广东珠海供电局,广东 珠海 519000)
变电站为电力系统的重要组成部分之一,承担着电能传输、转换、配送等关键功能,其安全和稳定运行对整个电力系统的稳定性具有重要影响[1],为了及时发现变电站的故障,有必要定期对变电站设备进行巡视检查[2]。巡视检查不仅可以及早发现潜在的故障,还有助于保持设备的良好状态,延长设备的使用寿命。目前,变电站设备的主要检测方式有人工检测、机器人检测[3]和无人机检测[4],其中人工检测仍然是主要的检测方式,而机器人巡检和无人机巡检主要用于数据采集,运维人员从中准确定位可能存在损伤或隐藏故障的电力设备。机器人和无人机巡检在实践中也面临着一些困难,例如,它们需要投入大量的时间和人力,同时由于环境复杂性,其准确性也可能受到一定影响;因此,需要持续不断地探索和优化这些技术,以提升巡检的效率和准确性水平。这种探索和优化的方向包括智能算法的应用、更高分辨率的图像采集手段,以及更精准的故障诊断方法等。
随着人工智能技术的迅猛发展,基于巡检图像数据的变电设备智能评估已成为现实,例如,利用卷积神经网络(convolutional neural networks,CNN)的目标检测算法能够提取目标特征,从而实现对变电站故障设备的智能识别和标记[5-6]。目前,以深度学习为核心的目标检测算法实现思路主要分为2种类型:一类是二阶段目标检测算法[7],如区域卷积神经网络(region-CNN,R-CNN)[8]、Faster R-CNN[9]、Mask R-CNN[10]等,这类算法通过生成一系列样本候选框,再使用神经网络方法提高候选框的分类及定位检测精度,算法检测精度高,但检测速度低;另一类是一阶段目标检测算法[11],例如YOLO[12]、SSD[13]等,这类算法则根据回归框的位置、大小以及目标类别的概率来直接检测目标,检测速度快且准确率也较高。
在电力设备领域,研究人员已经成功将深度学习应用于红外图像故障识别:Wang等[14]使用Mask R-CNN自动提取红外图像中的多个绝缘子,使机器能够独立分析绝缘子的故障,但该方法在识别精度和计算速度方面还存在改进的空间,尚难以满足实时检测的需求;Wei等[15]提出基于残差网络(residual network,ResNet)和改进贝叶斯优化的变电站设备热故障诊断模型,虽然该模型达到一定的识别精度,但数据集的大小仍然对最终的识别精度有很大的影响;为进一步提升红外图像故障诊断效率,Xiao等[16]提出基于红外图像分割和人工神经网络故障诊断相结合的绝缘子诊断方法,引入K-means聚类方法消除不良数据,可以准确地识别故障绝缘子的故障类型和位置;Zhao等[17]提出结合CNN和支持向量机的二进制分类方法,该方法不仅能够精确地定位绝缘子,而且所需的时间较少。可见,CNN在红外图像故障诊断方面发挥出色,能够自动识别故障,同时快速并准确地诊断故障;因此,基于CNN的红外图像故障诊断方法是一种具有潜力的方法,可以为变电站设备的智能评估提供可靠的技术支持。
虽然红外图像被广泛应用于变电设备热故障诊断,但红外传感器获得的单个红外图像细节较少,在光照条件下拍摄对比度和分辨率较低,导致故障检测不准确;与此相比,由光学传感器获得的可见光图像保留了电力设备丰富的纹理信息:因此,众多学者提出了将来自不同传感器的信息整合在一起,不仅便于故障识别和检测,还可以压缩数据,节省通信流量。在此研究方向:Liu等[18]提出基于CNN的红外和可见光图像融合新方法,利用孪生卷积网络获得融合了2个源图像像素活动信息的权重图;Li等[19]研究了自动编码器-解码器网络,在编码器中使用残差密集块来提取特征,并在解码器中融合这些特征以获得融合图像;Zhang等[20]提出基于CNN的通用图像融合框架,该框架采用2个卷积层,从多个输入图像中提取显著的图像特征,然后通过特征融合规则来融合这些特征,最后利用2个卷积层来结合和重建这些特征以获取融合图像。然而,目前大多数红外和可见光图像的融合方法通常会对所有输入图像执行相同的表示框架,这并不适用于特定的故障检测任务,需要进一步研究如何根据具体任务,来选择最合适的图像融合方法,以提高故障检测的准确性和可靠性。
为此,针对变电设备元件尺寸差异大、故障类型多样、检测效率低下等问题,本研究选择YOLOv5算法作为基础框架,以实现高效准确的变电设备故障检测。为了进一步提高模型的特征提取能力和降低计算量,本研究改进了YOLOv5的主干网络并增加了注意力模块,以提高对微小缺陷的识别能力。所提模型实现了对变电站设备故障的高效、精确检测,可以满足实际工业生产和巡视的需求。主要研究内容如下:
a)针对白天拍摄的红外图像对比度低的问题,提出多尺度拉伸红外图像和可见光图像融合算法,通过融合红外、可见光图像,生成边缘增强、质量更好的合成图像。
b)针对跨阶段部分(cross stage partial,CSP)网络结构计算复杂、耗费资源大的问题,在特征提取时,采用更加轻量化的ShuffleNet v2作为主干网络,以降低模型的参数量和计算量,从而提高检测的准确性和稳定性。
c)针对变电设备微小元件特征损失较大的问题,将卷积块注意力模块(convolutional block attention module,CBAM)[21-22]嵌入YOLOv5的预测网络中,增强网络特征提取能力,提高对小元件的检测性能,从而提高模型检测准确率。
d)为解决广义交并比(generalized intersection over union,GIOU)损失函数的不足,YOLOv5算法采用有效交并比(efficient intersection over union,EIOU)损失函数,提升了精度和收敛速度,取得更好的计算效果。
1 基于多模态感知的变电站智能巡视模型
为了提高变电站的整体运营效率并降低安全风险,本研究提出基于多模态感知的变电站智能巡视技术,采用图片数据来监测变电站设备的运行状态、温度、表面污秽、裂缝、破损等,从而识别变电站设备内部的变压器、断路器、隔离开关、电流互感器等器件故障,旨在实现对变电站环境的全方位监控,并显著提升巡视工作的效率。
1.1 变电站智能巡视技术流程
本文所提出的变电站智能巡视技术的工作流程具体为:首先,为了优化数据质量,对可见光图像和红外图像分别进行去噪处理(中值滤波),有助于削减图像中的噪声干扰,提升后续处理的准确性和可靠性;其次,采用多尺度拉伸红外图像和可见光图像融合算法,融合处理红外图像和可见光图像,以提高红外图像分辨度和细节层次度,并保留红外图像特征信息;最后,使用改进后的YOLOv5网络对变电站设备的数据进行训练,以识别变电站设备内部的变压器、断路器、隔离开关、电流互感器等器件故障,及时发现设备及回路预警,并实现变电站缺陷的快速响应和隐患的精准定位。
1.2 红外与可见光图像融合算法
如果在白天或者较强灯光的条件下拍摄变电设备红外图片,光照会严重干扰红外成像,导致红外图像的细节丢失严重[23]。为了有效解决这一问题,本文提出采用红外图像与可见光图像的融合处理方法。这种处理方式可以在融合图像中加强可见光图像的纹理结构,并保留红外图像的热信息,从而更好地揭示设备故障的热点。可见光图像在光照条件下具有更好的成像能力,融合后的图像能够更好地呈现设备表面的纹理特征,有助于提升图片的细节度;因此,该处理方法可提高设备缺陷的识别率。
本研究采用多尺度拉伸红外图像和可见光图像融合算法,将2个图像的信息整合到融合图像中,并保留可见光图像的颜色。首先,引入一种内容自适应的Gamma校正方法,根据可见光图像的动态范围拉伸红外图像的动态范围,以缓解融合图像中过度亮度变化和颜色失真的问题,其公式为
(1)
式中:p为图像中的像素;Ze(p)为拉伸后的红外图像;Zd(p)为红外图像的细节层(纹理、噪声等);Zb(p)为红外图像的基本层(由具有尖锐边缘的均匀区域组成);γ为调整参数,
(2)
为了扩展红外图像动态范围并同时保持输出不大于最大强度,假设Ze(p)的最大值、最小值分别为Ze,max、Ze,min,输出归一化拉伸后的红外图像Ze,s(用下标s表示相关参数的归一化值,下同),
(3)
然后,根据红外图像和可见光图像的特点引入新的权重矩阵,拉伸的红外图像和可见光图像的权重
W(p)=CwC(p)EwE(p).
(4)
式中:C(p)、E(p)分别为对比度、曝光度;wC、wE为对应C(p)、E(p)的权重指数,其默认值为1。对于每个图像,采用Laplacian滤波器Lf来处理其灰度空间Ig,取滤波器响应的绝对值以获得对比度,即
C(p)=Lf⊗Ig(p).
(5)
式中“⊗”为卷积运算符号。
红外图像中亮度较高的部分在权重矩阵中具有较低的值,因此红外图像关注的某些部分(例如电缆)在融合图像中变得昏暗。为了防止融合图像被可见光图像所主导,需要采取一些策略来平衡两者的影响。在这一背景下,将经过拉伸处理的红外图像的对比度,映射到与可见光图像的对比度相匹配,以确保两者在数量级上保持一致,公式为
(6)
式中:Cv,max、Cv,min分别为可见光图像对比度的最大值、最小值;Cs,max、Cs,min分别为拉伸红外图像的对比度的最大值、最小值;Cs(p)为经过拉伸处理的红外图像的对比度;C′s(p)为Cs(p)匹配后的值。
在E(p)中,根据Ig(p)与0.5的接近程度使用高斯曲线进行加权,即
(7)
为改善拉伸后的红外图像中高亮部分的权重,式(7)中参数φ设置为:对于可见光图像,φ=0.2;对于红外图像,φ=0.375。
最后,根据权重矩阵使用高斯金字塔和拉普拉斯金字塔组合,以产生融合图像。
1.3 YOLOv5算法
YOLO目标检测算法的特点之一是将目标检测任务转化为回归与分类的综合任务[24-25],其核心思想是将输入图像划分为S×S(S为网格的边长)的网格,在每个网格单元中执行目标检测任务,包括预测物体类别和位置参数,以及生成边界框。每个边界框包含目标物体的类别标签、置信度、尺寸和位置参数。为获得最终目标检测结果,采用非极大值抑制(non-maximum suppression,NMS)算法清除冗余边界框。通过比较各边界框的置信度,NMS算法过滤多余检测结果,保留最具置信度的预测框,提供最可靠的目标识别结果。这一步骤有效消除了重复检测和冗余信息,使最终输出更准确可靠。
变电站智能巡视技术的核心目标是采用先进的计算机视觉技术替代常规的人工巡视方法。为实现这一目标,需要具备实时识别和高检测精度的识别模型。在变电站智能巡视任务中,YOLO系列算法在多个方面(包括灵活性、检测速度和模型尺寸)表现出显著的优势,在目标检测领域表现卓越,其卓越的准确率和对小目标的良好识别能力使其在实际应用中备受青睐;因此,本文采用YOLOv5算法作为变电站设备故障识别模型。
YOLOv5网络模型由4个关键模块组成:输入端、主干网络、瓶颈块和预测端。该模型以图像数据作为输入,输出检测框和对应的类别标签。为提高鲁棒性和泛化能力,采用Mosaic数据增强、自适应锚框计算等方法,通过扩充数据集提高泛化能力和检测精度。主干网络结构采用焦点、CSP网络和空间金字塔池化(spatial pyramid pooling,SPP),防止图像失真,并解决CNN重复提取图像特征的问题。瓶颈块结构采用特征金字塔网络结合路径聚合网络,缩短层间路径,促使高层和低层语义信息更好融合。预测端包括边界框损失和NMS算法,通过NMS处理,保留最佳目标框并去除冗余预测框,以确保检测结果的准确性和可靠性。
YOLOv5网络架构及子模块分别如图1、图2所示。图1中,Focus表示焦点,CBL表示卷积层后接批量归一化层,Contact表示通道叠加,Conv表示普通卷积层;图2中,BN表示批归一化,Leaky relu表示允许负值有非零的梯度的激活函数,Res uint表示残差单元,add表示结合模块,Maxpool表示最大池化模块,slice表示从张量中提取特定的部分或切片。
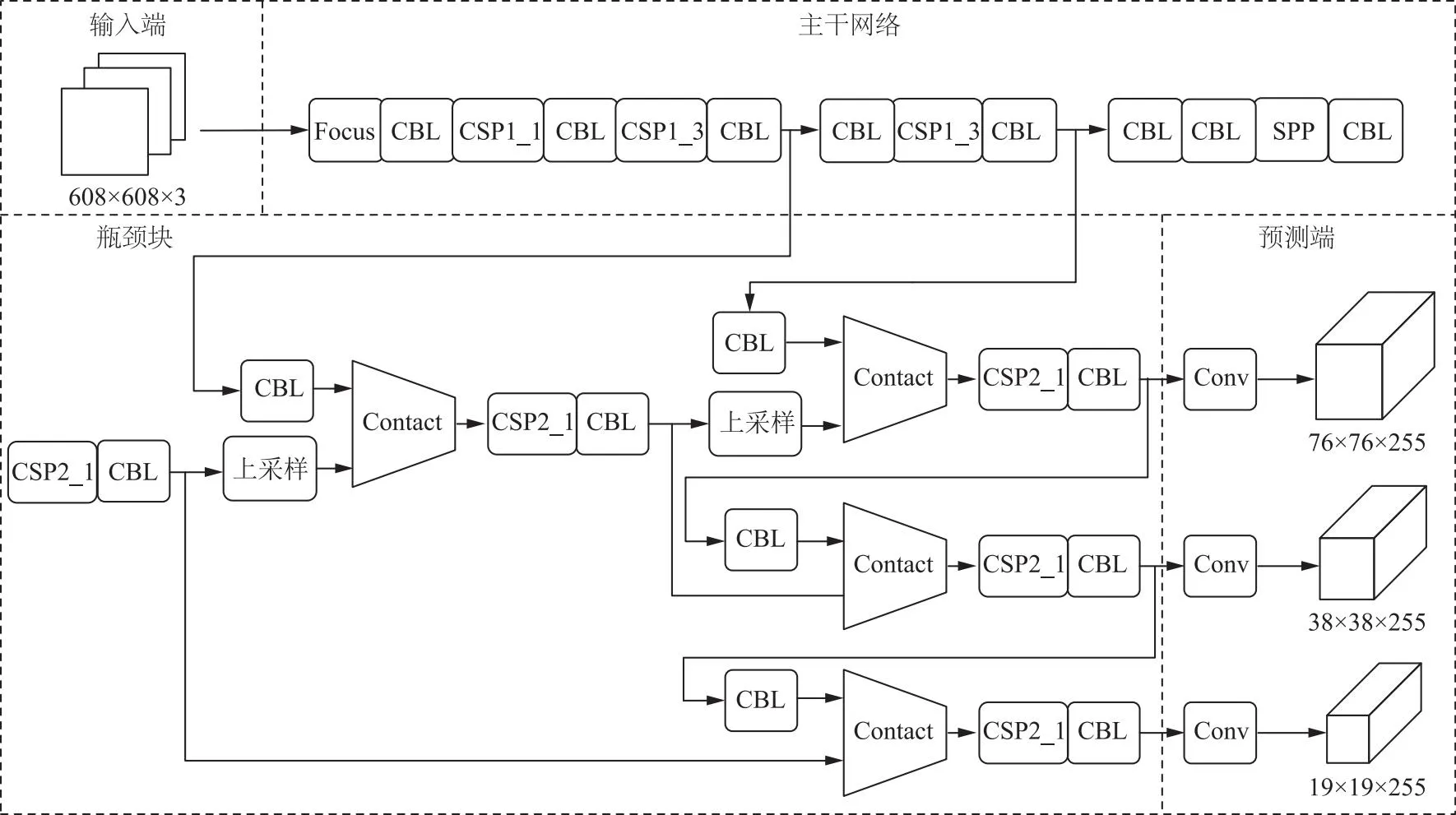
图1 YOLOv5网络架构Fig.1 The network architecture of YOLOv5

图2 YOLOv5子模块Fig.2 The sub-module of YOLOv5
YOLOv5网络模型的核心参数包括输入图像尺寸、训练数据集、超参数(如学习率、批次大小、迭代次数)等。通常情况下,较大的输入尺寸可以提供更精细的检测结果,但也会增加计算复杂度。
1.4 YOLOv5网络模型的改进
1.4.1 主干网络改进
在YOLOv5的主干网络中,CSP网络结构虽然在提升检测性能方面表现出色,但在计算资源受限的硬件设备上,其计算复杂性给推理过程带来了挑战,导致推理时间难以满足各种应用需求。相对于YOLOv5的默认主干网络,ShuffleNet是一种更轻量级、更高效的选择,不仅能够显著减小模型的规模和计算量,还能够在一定程度上提升模型的运行效率;因此,主干网络采用了主流的轻量化网络结构ShuffleNet v2。其中,混洗单元是ShuffleNet v2的一个关键组件,其结构如图3所示,图中DWConv表示深度卷积层,Channel Split表示通道分割,Channel Shuffle表示通道混洗。图3(a)、(b)所示分别为轻量级网络ShuffleNet v2的2种核心模块,分别为模块a和模块b。当步长为1时,使用模块a,它可以增加通道数但保持输入输出尺寸不变;当步长为2时,使用模块b,它会将通道数加倍并将特征图尺寸减半。
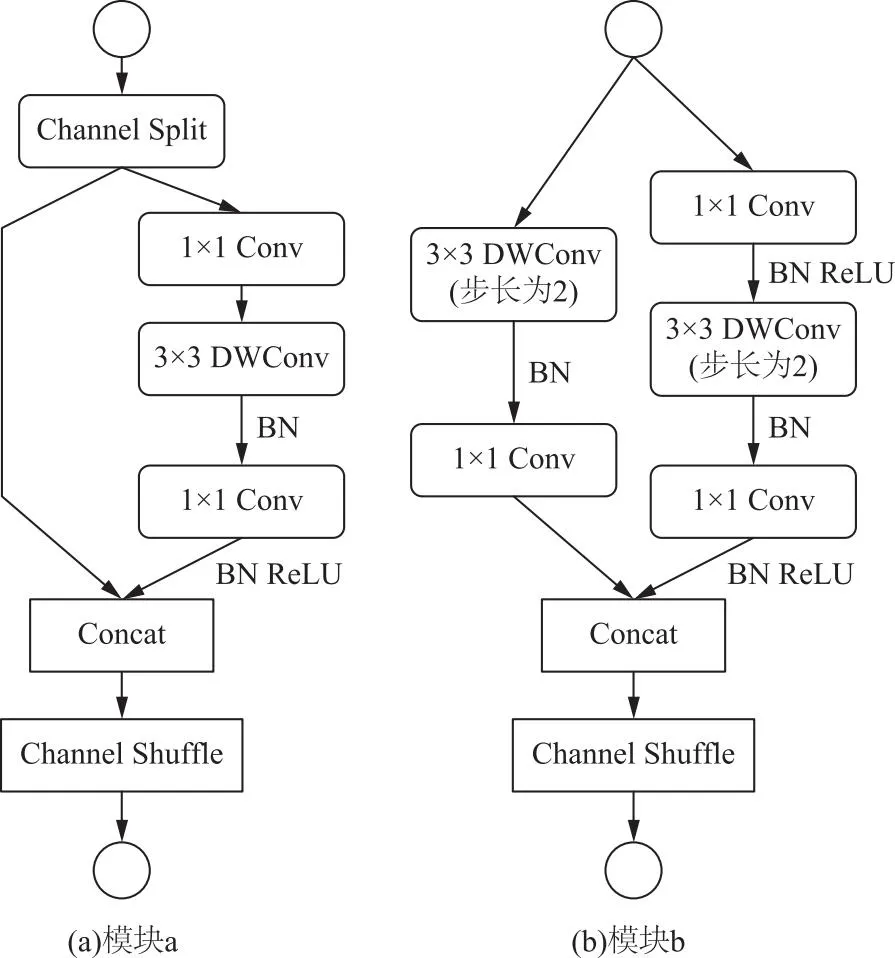
图3 混洗单元结构Fig.3 Structure of shuffle unit
混洗单元将输入特征图拆分成2个分支,步长为1时左边的分支不做处理,右边的分支则经过3个卷积操作,来确保输入特征矩阵和输出特征矩阵的通道数相等,从而达到最小的乘加操作值并减少时间消耗,最后,混洗单元在通道维度上随机打乱特征图的顺序,以融合2个分支之间的特征信息。当步长为2时,不再进行通道拆分。这种结构使得ShuffleNet v2网络的计算量和参数量较低,有利于轻量化网络的构建。改进前后的主干网络整体结构如图4所示。
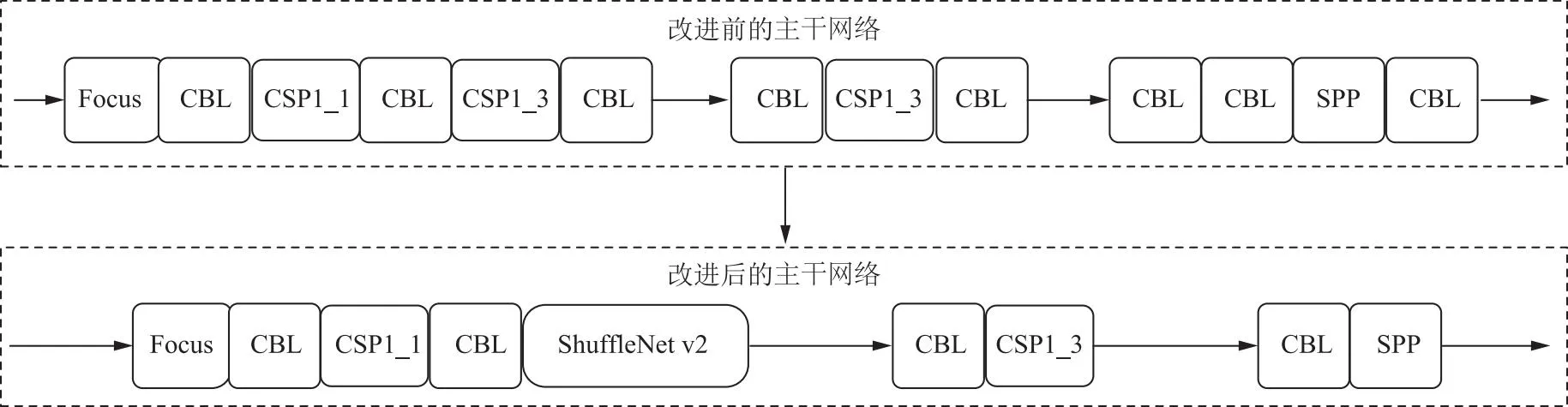
图4 主干网络改进前后对比Fig.4 Comparison of the backbone network before and after improvement
1.4.2 CBAM
变电站环境通常比较复杂,可能存在灰尘、水汽等干扰物,导致收集到的图像细节模糊,容易造成误检和漏检。在目标检测领域,鉴于输入网络的图像复杂且多样,引入注意力机制可使模型在资源有限的情况下,关注重要内容和关键位置,以提高模型的检测精度。多头注意力机制可以1次并行运行1个注意力模块。CBAM是一种用于前馈CNN的视觉注意力模块,旨在提高网络的性能和准确度,它的实现较为简单且有效。与常规的注意力模块(包括多头注意力模块)相比,CBAM具有以下优点:①可以同时沿着通道和空间这2个独立维度推导出各自的权重系数,从而多维度地表示特征;②可以根据不同的特征图自适应地细化特征,以更好地捕捉特征之间的相关性和重要性,提高模型的性能和准确率;③可以灵活地插入到前馈网络结构中,以提高网络的特征提取能力和检测性能。鉴于此,本研究采用CBAM并将其嵌入预测网络中,增强网络特征提取能力,提高模型检测准确率。
如图5所示,通道注意力模块和空间注意力模块是该模块的2个部分。首先,通过通道注意力模块对输入特征图进行最大池化和平均池化操作,以获取不同通道的特征向量权重参数,之后使用全连接层和sigmoid函数进行归一化处理,最终赋值给通道权重,以实现通道维度上的特征变换;然后,将输入特征输入空间注意力模块,经过最大池化和平均池化操作后得到双通道的特征图,最终进行卷积、sigmoid函数处理等操作,实现空间维度上的特征变换。简单来说,CBAM先在通道维度上实现特征变换得到新的特征图,然后在空间维度上对新的特征图进行特征变换,输出最终特征图。

图5 CBAMFig.5 CBAM
本研究在YOLOv5的预测端的3个分支后添加了CBAM,以提高模型检测精度。由于实际工业监测中采集到的图像尺度大小不一,这一方法可以帮助模型学习到更多重要的信息,同时几乎不会影响模型的大小。改进前后的预测端结构如图6所示。

图6 预测端改进前后对比Fig.6 Comparison of prediction terminal before and after improvement
1.5 损失函数
YOLOv5的损失函数包含3个部分,分别是目标分类误差Lcls、置信度误差Lobj,以及边界框位置预测误差Lbbox。原网络采用GIOU损失函数对边界框位置误差进行预测,计算式为
(8)
式中:kIOU为预测框和真实框的交并比;S2为覆盖预测框和真实框的最小矩形面积;S1为交集的面积。
该损失函数解决了两框没有交集面积时kIOU值为0的问题,但是当预测框和真实框的宽高相等且处于同一水平或同一垂直线时,损失退化为交并比损失,而且在横向与纵向收敛较为缓慢;因此,为了提高模型的收敛稳定性,本研究采用EIOU损失函数来定义YOLOv5算法在目标检测中的损失函数,其涵盖了重叠损失LIOU、距离损失Ldis和宽高损失Lasp3个方面的损失函数[26],公式为
(9)
式中:b为边界框;bgt为真实边界框;w、h分别为边界框的宽度、高度;wgt、hgt分别为真实边界框的宽度、高度;wc、hc分别为能够共同包围2个边界框(预测框和真实框)的最小矩形的宽度、高度;ρ(b,bgt)为2个框中心点的距离;ρ(w,wgt)、ρ(h,hgt)分别为2个框宽度、高度之间的差异。EIOU损失函数不仅考虑了重叠损失和中心距离损失,也调整了宽高损失,在惩罚过程中,直接对w和h的预测结果进行惩罚,可以更好地反映预测框和真实框之间的宽高差异,加快网络收敛,有助于提高回归精度。
2 实验与结果分析
2.1 平台搭建与模型训练
本研究模型训练与测试采用的软件环境和硬件环境配置为:Windows 11操作系统、PyTorch深度学习框架、CUDAv11.6、OpenCV4.6.0、CPU Intel i5-12500H @2.50 GHz、16GiB RAM、GPU NVIDIA GeForce RTX 3060。设置输入图片的大小为512×512,设置批次大小为8,进行5 000次迭代,学习率设为0.001。CBAM中空间注意力模块的降维系数设置为16,隐层单元数设置为256,卷积核大小设置为7,步长设置为1,填充值设置为1。
2.2 数据集和评价指标
2.2.1 数据集
因尚无公开的变电设备图像数据集可用,本研究采用自建方式,构建了包含红外和可见光图像的变电设备数据集。使用海康威视H16热像仪采集变电设备图像,该设备可同时采集分辨率为160×120的红外图像和分辨率为1 600×1 200的可见光图像,其测温的量程范围为-20~400 ℃,满足本研究的需求。使用海康威视H16热像仪得到6 301张图像,共涉及11种缺陷检测类别,其中包括了表计读数异常、外壳破损、箱门闭合异常、盖板破损等。之后将标记的数据集分为5 000张图像的训练集和1 301张图像的测试集,见表1。

表1 变电站图像数据集Tab.1 Substation image dataset
为了进一步丰富数据集,本研究采用图像翻转和平移等增强技术,对部分图像进行数据增强以扩展数据集的数量,提高模型在不同视角和场景下的鲁棒性和泛化能力,其数据集如图7所示。
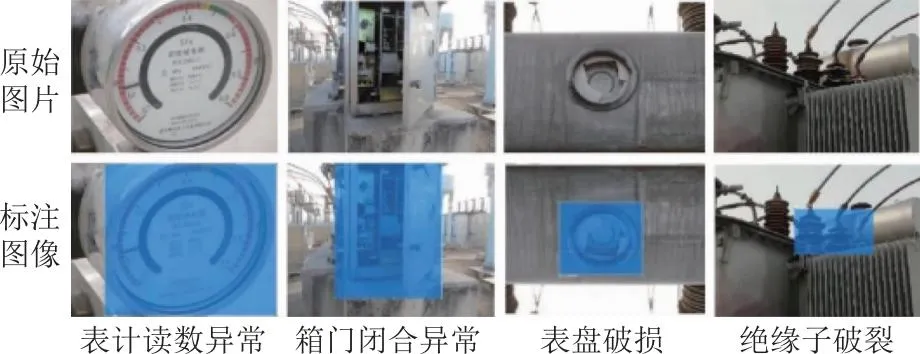
图7 数据集可视化Fig.7 Dataset visualization
2.2.2 评价指标
为了验证改进后的YOLOv5网络模型在变电站智能巡视中的性能,引入混淆矩阵指标对模型进行评价,混淆矩阵包含4种类型的定义:TP(将正样本正确预测为正样本,样本数量记为nTP)、TN(将负样本正确预测为负样本,样本数量记为nTN)、FP(将负样本错误地预测为正样本,样本数量记为nFP)、FN(将正样本错误地预测为负样本,样本数量记为nFN)。在评价模型性能时,选择平均准确率kmAP、召回率R、模型参数量kpar、模型计算量kFLOP和检测速率kFPS作为主要评价指标。各计算公式如下所示:
(10)
(11)
(12)
式中:P为准确率,表示正确预测的样本占所有预测出目标的比例;SAP为准确率-召回率曲线与坐标轴围成的面积;n为类别的总数。kFPS为每秒检测的帧数,衡量算法检测速度的快慢[27]。
2.3 对比实验
本研究选用4种轻量化目标检测模型(YOLOv5s、YOLOv5-MobileNet[28-29]、YOLOv4-tiny[30]和YOLOv3[31])和2种目标检测领域SOTA的模型(SIOD[32-33]和MonoDETR[34]),与本文所提的改进后的YOLOv5模型在变电站场景下进行性能对比。在测试阶段,将模型应用于数据集中的所有图像,并计算出每个模型的平均准确率、计算量、参数量和检测速率,结果见表2。

表2 对比实验结果Tab.2 Comparative experimental results
从表2中可以看出,相较于其他轻量化模型,改进YOLOv5模型的参数量和计算量均最低,且平均准确率最高:平均准确率较YOLOv5s模型提高了约4%,能够满足变电设备故障检测的高精度需求;检测速率略高于YOLOv5s模型,低于YOLOv4-tiny,但仍具有实时性。本文所提模型在整体框架的基础上融合了ShuffleNet v2,大大降低了模型的参数量,相较于2种SOTA模型具有轻量级的特点,可以轻松部署到移动平台,满足对变电站设备实时监测的场景需求,并且在特征提取模块引入了注意力机制(CBAM),该机制允许模型集中注意力在与当前任务相关的部分输入数据上,通过这种方式可以更好地处理噪声数据或不相关信息,应对输入数据中的干扰。这种集中注意力的能力有助于提高模型的准确性和性能,增强模型鲁棒性。
综合上述实验结果,本文所提的改进YOLOv5模型是一种高效准确的变电设施检测模型,其独特的性能表现包括出色的检测精度和实时性,使其在变电设备智能巡视领域具有重要的价值。图8展示了该模型对某些变电站设备的缺陷检测可视化结果。示例中虚线框内标注的区域是温度超过设定阈值的异常部分,即可能存在缺陷的局部区域。实验结果与实际情况相符,表明了本文所提模型的有效性和准确性,可以有效地对变电站设备进行精确检测识别。
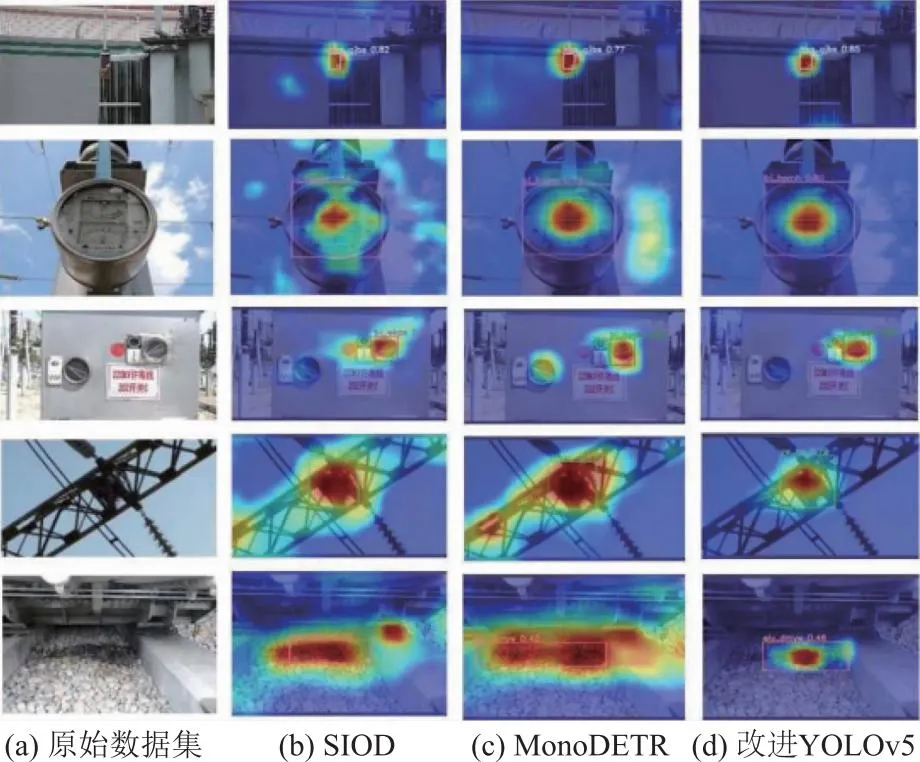
图8 改进YOLOv5模型可视化结果Fig.8 Improved visualization result of YOLOv5 model
在实际应用中,本文所提的改进模型有望为变电站设备故障的自动检测和识别提供可靠的解决方案,从而提升了电力设施的运行效率和安全性。
2.4 消融实验
为了更加全面地分析改进后的YOLOv5网络模型中各个关键改进模块对于变电设备识别的优越性,本研究在原YOLOv5的基础上,将改进后的主干网络(ShuffleNet v2)、注意力机制(CBAM)分别加入原YOLOv5中,进行一系列消融实验。仅加入ShuffleNet v2的改进模型记为“YOLOv5+Shuffle-Net v2”,仅加入CBAM的改进模型记为“YOLOv5+CBAM”。具体实验内容与测试结果见表3。
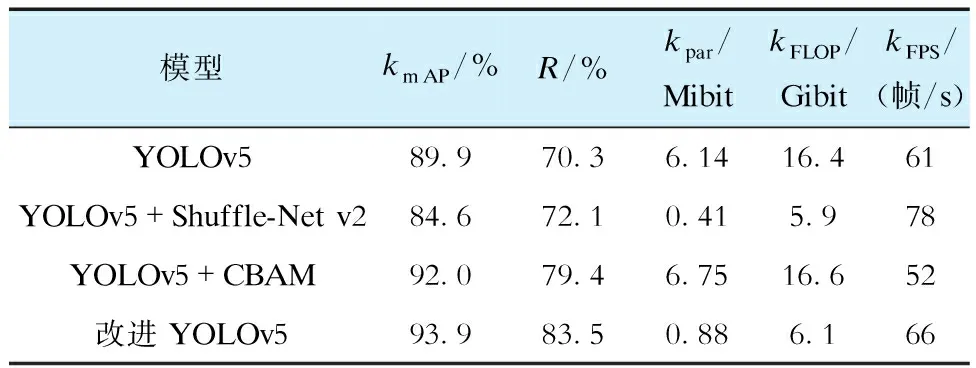
表3 消融实验结果Tab.3 Ablation results
从表3中可以看出:仅加入ShuffleNet v2后,YOLOv5模型的平均准确率下降了5.30%,但参数量、计算量分别减少了5.73 Mibit、10.5 Gibit,模型的检测速率提高了17帧/s,模型的计算速度得到了显著提高,此举实现了在保持一定精度的同时,大幅度提升模型的计算效率,从而使其具备更好的实时性能;而仅将CBAM引入YOLO v5模型后,平均准确率提高了2.1%,计算量和参数量的变化不大,但检测速率稍微降低;与原YOLOv5模型相比,融合了这2个方面的改进YOLOv5模型参数量减少了5.26 Mibit,计算量减少了10.3 Gibit,平均准确率提升了4.0%。综合上述实验结果可知,融合ShuffleNet v2和CBAM的改进YOLOv5模型,不仅能够在不降低精度的情况下减少计算负担,还能够有效提升检测速度和实时性。这一优化策略为目标检测算法的发展提供了新的思路,尤其在对计算效率和精度均有高要求的变电设备智能巡视任务中,具有显著的应用潜力。
3 结束语
本文提出一种改进YOLOv5模型的变电站智能巡视技术。首先,结合ShuffleNet v2对主干网络进行修改,大大降低模型的体积和计算量,提高检测速度;其次,在YOLOv5的预测端引入注意力机制(CBAM),增强算法检测变电设备故障的能力,提高检测精度;最后,在损失函数部分,引入EIOU函数解决长、宽损失定义不明确的问题,在不影响检测速度的前提下,提高算法的检测性能。在自建数据集上完成实验,结果表明:相比于原YOLOv5模型,改进后的模型大大降低了参数量和计算量,且提高了模型检测的准确率;同时,与目前主流的轻量化模型相比,本文所提的改进YOLOv5模型综合性能最好。
然而,这些改进仍需考虑模型的鲁棒性、数据集多样性,以及实际部署时的硬件限制和性能要求。进一步研究可以集中在提高模型的适应能力、解释性和实际应用中的可行性,将有助于将改进YOLOv5模型更好地应用于变电站智能巡视等现实场景。
