非高斯噪声下基于CKMC-CKF的发电机动态状态估计
2024-04-09赵志雷黄继东王义杨志伟
赵志雷,黄继东,王义,杨志伟
(1.国能神东煤炭集团有限责任公司供电中心,陕西 榆林 719300;2.许继电气股份有限公司,河南 许昌 461000;3.郑州大学 电气与信息工程学院,河南 郑州 450001;4. 国网三门峡供电公司,河南 三门峡 472000)
随着相量测量单元(phasor measurement unit,PMU)的广泛应用,不同类型的状态估计(state estimation,SE)技术被用于跟踪电力系统的隐藏状态变量[1-3]。静态SE假定系统处于准稳态状态下,可以监测某时刻母线电压幅值和相位角。动态SE(dynamic state estimation,DSE)能实时监测系统的动态变化[4-5]。因此,DSE被广泛应用于电气设备控制方案的实现,如同步发电机的机电暂态跟踪。
对于DSE,近年来已提出了诸多经典卡尔曼滤波器(Kalman filter,KF),如扩展KF(extended KF,EKF)[6]、无迹KF(unscented KF,UKF)[7]、容积KF(cubature KF,CKF)[8]及其扩展形式[9-10],旨在准确跟踪系统的内部数据。鉴于非高斯过程的不确定性可能导致的偏差估计,文献[11]提出了一种简化的高斯综合EKF方法来处理非线性状态估计。考虑到线性化近似引起的EKF截断误差,研究人员又开发了几种无导数DSE方法。文献[12]基于平方根UKF和作用于测量状态估计的加权因子提出一种改进的方法,提高了状态估计的稳定性和鲁棒性。文献[13]引入了自适应UKF,同时监控集成电机变速器的控制输入和状态信息。文献[14]开发了基于变分贝叶斯的自适应CKF,可用于跟踪随机发生的注入攻击的状态。上述所提出的状态估计方法大多基于高斯噪声分布假设,在存在非高斯噪声的情况下,这些方法的估计性能可能会显著下降。
为了减轻测量函数中异常值的不利影响,如非高斯噪声、负载波动[15]等,研究者也提出了很多改进措施。为了降低恶意网络攻击导致的估计误差,文献[16]中构建了基于分布式压缩感知的估计策略。此外,作为信息理论学习(information-theoretic learning,ITL)的局部相似函数,熵包含了概率密度函数的高阶矩,在处理非高斯噪声假设时具有优异的特性。其中,基于最大熵准则的DSE算法被融合到EKF[17]、UKF[18]中,大幅增强了卡尔曼滤波器在非高斯噪声下的鲁棒性。然而,基于高斯核相关熵的最优核带宽(kernel bandwidth,KB)往往是通过大量计算和测试获得的,这在实际应用中限制了该方法的通用性。此外,高斯核函数在矩阵Cholesky分解中会出现奇异值[19],严重影响了DSE的计算精度。
为了解决上述问题,提高传统DSE对非高斯噪声问题的鲁棒性,本文基于柯西核相关熵准则,提出一种基于柯西核最大相关熵(Cauchy kernel maximum correntropy,CKMC)的CKF算法(简称CKMC-CKF算法)。CKMC-CKF算法通过引入柯西内核优化准则,将CKF算法和CKMC准则相结合,可以有效抑制同步发电机模型中非高斯噪声对测量数据的不利影响。在IEEE 39节点系统上进行仿真分析,以验证CKMC-CKF算法在非高斯噪声条件下的跟踪性能。
1 发电机动态状态估计模型
实际电力系统的离散微分方程由状态变量和测量值2个时变离散非线性函数组成,采用改进欧拉法[19]实现,非线性函数的具体表达式为:
(1)
式中:φ(·)、h(·)分别为状态传播函数和状态测量函数;Xk、Zk分别为时刻k的状态向量和观测向量;uk为时刻k的输入向量;wk、vk分别为时刻k的状态噪声和测量噪声。
同步发电机是电力系统中关键设备之一,对其准确建模对电力系统的动态跟踪具有重要意义。本文采用同步发电机的四阶模型,比传统的二阶发电机模型更接近发电机的实际运行模式。发电机状态函数建立如下[20]:
δ=ω-ω0,
(2)
(3)
(4)
(5)
式中:δ为发电机的功率角;ω为电角速度,ω0为其初始值;ed、eq分别为d、q轴上的瞬时电动势(下标d、q分别表示d、q轴,下同);KD为阻尼系数;Aj、Tm、Te分别为惯性常数、机械功率、电磁功率;Ufd为定子的励磁电压;xd、xq为同步电抗;x′d、x′q为瞬态电抗;Td0、Tq0为时间常数;id、iq为定子电流。
本研究中设置状态向量Xk=(δ,ω,eq,ed)T,输入向量uk=(Tm,Ufd,iR,iI)T,其中iR、iI分别为定子R轴和I轴上的电流。为了提高同步发电机的估计精度,采用四维量测量,发电机的测量函数设置为Zk=(δ,ω,eR,eI)T,其中:
eR=(ed+idxq)sinδ+(eq-idxd)cosδ,
(6)
eI=(eq-idxd)sinδ-(ed+iqxq)cosδ.
(7)
为便于求解,将式(6)、(7)表示为状态变量和输入变量的函数:
id=iRsinδ-iIcosδ,
(8)
iq=iIsinδ+iRcosδ.
(9)
2 基于CKMC准则的CKF鲁棒动态估计
2.1 CKMC
作为统计相似性的度量,相关熵可以由1对随机变量A和B定义[17]:
V(A,B)=E[κσ(A,B)]=

(10)
式中:V(A,B)为变量A和B的均值;E(·)为期望算子,κσ(A,B)为对应的Mercer核,σ为KB;fA,B(A,B)为A和B之间的联合概率密度函数。
由于样本的有限性,V(A,B)的近似估计
(11)
式中:N为样本总数;Ai、Bi为第i对随机变量。
在信息理论学习(information theory learning,ITL)中,高斯核通常被认为是相关熵的核函数。本文采用柯西核作为熵的核函数,与高斯核[16]相比,柯西核结构简单,对KB不敏感,避免了最优KB选择的大量测试,提高了计算效率[17]。柯西核函数定义为
(12)
式中:e=A-B,Cσ(e)为对应的柯西核。
通过最大化式(11)并结合式(12),可以获得基于CKMC的目标函数
(13)
2.2 CKMC-CKF方法的工作机理
本文所提的CKMC-CKF是在传统CKF框架上进行改进,通过线性回归方程推导出2种加权局部相似度函数,并结合CKMC准则,利用固定点迭代法不断更新误差协方差矩阵,从而降低不良数据的权重,最终提高动态状态估计的精度和鲁棒性。具体原理包含如下过程:

(14)
(15)

当k>0时,首先,根据球面径向容积法则,生成一组容积Sigma点:
(16)
j=1,2,…,2n.
(17)
(18)
式中:Xj,k-1|k-1为k-1时刻第j个Sigma点;Ij为单位矩阵;n为状态维度;Sk-1|k-1表示对矩阵Pk-1|k-1Cholesky分解。
(19)
(20)
(21)


(22)
(23)
Zi,k∣k-1=h(Xk,Xi,k∣k-1);
(24)
(25)
(26)
式中:Xi,k∣k-1为Sigma点;Zi,k∣k-1为经量测方程传播后的Sigma点。
c)线性回归方程的推导。为了迭代计算出最佳的状态估计值,首先定义伪量测向量
(27)
将量测函数线性化近似,得到近似后的量测值
(28)
由式(1)、(28),可得线性回归方程组
(29)
其中,
(30)
(31)
式(29)—(31)中:ηk为误差矩阵;Bp,k∣k-1、Br,k分别为Pk∣k-1、Rk进行Cholesky分解所得的分解因子。
基于式(13),所提CKMC-CKF方法的目标函数可进一步表示为:
(32)
(33)
(34)
式中:eX,i、eZ,i为加权矩阵eX、eZ的第i个变量;m为量测信息的维度数。
柯西核相关熵采用2种加权相似函数对状态误差和量测误差进行修正,从而降低不良数据的权重。对式(32)求偏导,并且令∂JCKMC/∂Xk=0,可得:
(35)
进一步整理式(35),利用量测量对预测后的状态值进行修正,得到状态量的最优估计形式为
(36)
其中:
(37)
(38)
(39)
(40)
(41)
最后,状态量后验误差协方差Pk更新为
(42)
基于CKMC-CKF的同步发电机DSE流程如图1所示,其中,t为内循环的时间变量,k为外循环的时间变量,ε为判断阈值。

图1 基于CKMC-CKF的同步发电机DSE流程Fig.1 Synchronous generator DSE flowchart based on CKMC-CKF
3 算例分析
3.1 算例设计与评价指标
在本节中,使用IEEE 10机39节点标准系统模拟电力系统的网络结构,其拓扑如图2所示。由于噪声分布的随机性,使用蒙特卡洛技术来模拟噪声的统计信息,并设置采样数N=200。假设系统在16-21线路处发生三相金属性接地短路,且当仿真进行到0.5 s时出现系统故障,经0.2 s后系统过渡至新稳态。其中,以稳态运行值作为状态变量的初始值,并且初始误差协方差设置为P0∣0=10-5I。此外,过程和测量的噪声协方差矩阵分别设置为10-5I和10-6I。本文以同步发电机Gen2为例,将CKF[8]、MCC-CKF[22]与所提CKMC-CKF方法进行比较,验证CKMC-CKF方法的有效性。

图2 IEEE 39节点系统Fig.2 IEEE 39 bus system
为了评估各种滤波方法对于发电机状态的跟踪效果,本文将平均绝对误差M和总体性能误差J作为评价指标对不同方法的估计结果进行量化分析,定义如下[17]:
(43)
(44)

3.2 KB测试
如文献[16]所述,相关熵中KB对状态估计的准确性具有决定性作用。具体而言,过大的KB可能无法抑制异常值,过小的KB可能导致收敛缓慢,因此KB的取值对于DSE的估计结果至关重要。为了验证所提方法在不同KB下的性能,本文所提出的CKMC-CKF算法在不同KB下的误差指标见表1。

表1 不同KB下CKMC-CKF的误差Tab.1 Errors of CKMC-CKF at different KBs
从表1数据可知,CKMC-CKF算法在不同KB下的估计误差没有太大差异。基于柯西内核损失准则的最大熵对KB的选择不敏感,在很大程度上避免了对最优KB的大量实验,从而提高了算法的通用性。为了便于后续研究,CKMC-CKF的KB设置为50。
3.3 噪声不确定性测试
由于实际电网中运行环境的时变性,噪声的统计特性在实际系统中会随着时间而变化[21],因此,实际仿真中的系统噪声通常是未知的。为了验证所提方法在该工况下的有效性,假设系统的过程噪声协方差设为Qk=diag(10-3,10,10-1,10-1),测量噪声设为Rk=diag(10-5,10-5,10-3,10-5)。
在该工况下,CKF、MCC-CKF、CKMC-CKF 3种方法的状态变量估计结果如图3所示。可以看出:当故障出现后,CKF对于同步发电机的状态跟踪出现了较大的估计偏差,精度下降严重;MCC-CKF对不确定的高斯噪声具有一定的抵抗力,但也因其对KB的依赖而受到限制。相比而言,CKMC-CKF具有良好的数值稳定性和对不同KB的不敏感性,因此其估计曲线最贴近系统的真实状态,状态估计的精度更高。

图3 噪声不确定工况下的状态估计Fig.3 State estimation under noise uncertainty
噪声不确定工况下CKF、MCC-CKF和CKMC-CKF方法的估计误差指标对比情况见表2。可以看出,与传统CKF和MCC-CKF相比,本文所提的CKMC-CKF方法误差最小,估计精度更高,对于不确定噪声的鲁棒性更强。

表2 噪声不确定工况下的估计误差指标Tab.2 Estimation error metrics under noise uncertainties
3.4 非高斯噪声测试
发电机动态估计模型中通常假设噪声为高斯白噪声,即噪声协方差是一个常数矩阵。在实际电力系统中,PMU采集的量测信息在传送至控制中心时,通信信道易遭受噪声污染,导致出现非高斯噪声,这会影响动态状态估计性能,降低滤波精度[22]。
为了验证所提方法在非高斯噪声下的滤波性能,假设量测方程中的噪声信号rk是由混合高斯函数表示的重尾噪声,即
(45)
图4展示了v1=10-4、v2=10-6、θ=0.98时的状态估计情况。可见,当系统出现非高斯噪声时,基于高斯噪声假设的CKF方法跟踪速度大幅下降,与状态真实值具有明显的误差,跟踪精度较低,已经不满足动态估计的准确性和实时性要求;相比于CKF,MCC-CKF方法对非高斯噪声具有一定的鲁棒性,但是由于MCC准则基于高斯内核,对于非高斯噪声情形的估计误差仍然较大;CKMC-CKF方法与真实值更加接近,相比于CKF和MCC-CKF,估计精度分别提高了约78%和35%。这是由于CKMC-CKF方法将柯西内核作为相关熵的内核函数,既克服了KB选择复杂性的困难,也极大降低了非高斯噪声情形下发电机的估计误差。因此,该工况下CKMC-CKF方法具有最高的估计精度和最强的鲁棒性能,能够准确地跟踪发电机的状态。
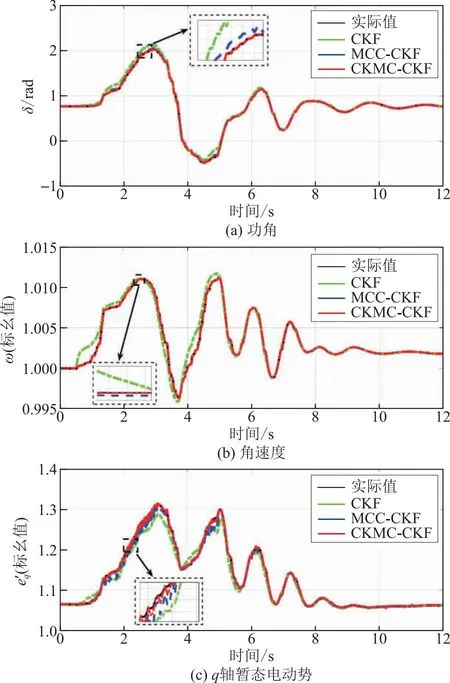
图4 非高斯噪声工况下的状态估计Fig.4 State estimation under non-Gaussian noise
不同滤波器在混合程度为θ=0.98、θ=0.95下的误差指标分别见表3、表4。可以看出,本文方法在非高斯噪声下估计误差最小,滤波性能最好。
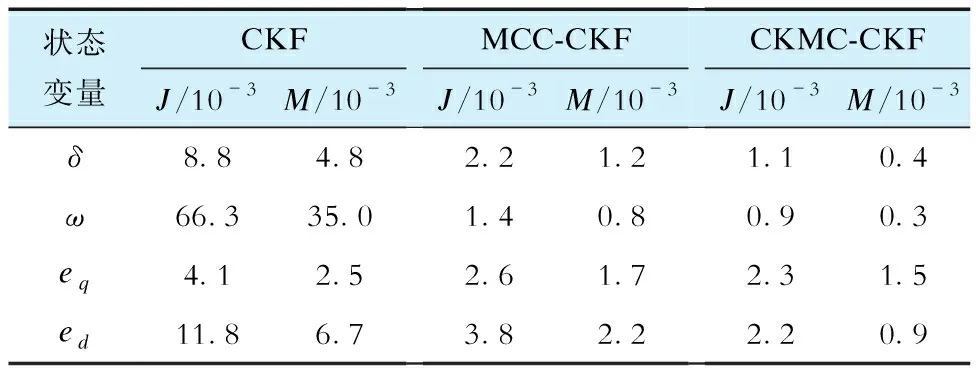
表3 非高斯噪声混合度为0.98时的误差指标Tab.3 Error metrics for non-Gaussian noise with mixing degrees θ=0.98
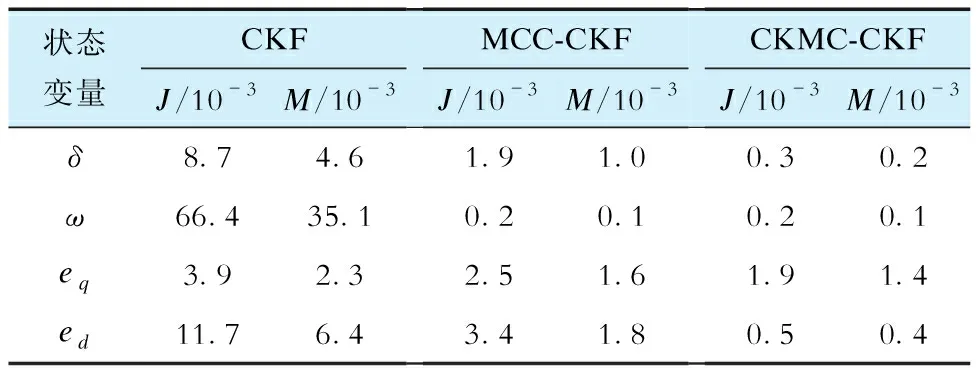
表4 非高斯噪声混合度为0.95时的误差指标Tab.4 Error metrics for non-Gaussian noise with mixing degrees θ=0.95
4 结论
针对电力系统中同步发电机动态状态估计中存在的非高斯噪声问题,本文提出了一种基于CKMC-CKF的发电机动态状态估计方法,主要结论如下:
a)利用柯西核作为相关熵的核函数,避免了最优KB选择的大量测试,提高了动态状态估计的计算效率;利用熵增益动态修正误差协方差,增强了状态估计的精确性。
b)通过在IEEE 39节点系统进行仿真分析可知,相比于CKF和MCC-CKF,所提CKMC-CKF方法在非高斯噪声环境下具有更准确的估计精度和更强的鲁棒性,可以有效地跟踪同步发电机的状态。
c)后续将进一步研究电力系统遭受网络攻击情况时,同步发电机的量测信息和状态估计问题。
