基于肌电控制的半定制柔性康复训练手套
2024-03-31刘彩霞余宏波刘贵乾
刘彩霞, 马 菲, 余宏波, 刘贵乾, 郭 旭, 黄 英
(1.合肥工业大学 物理学院,安徽 合肥 230601; 2.合肥工业大学 微电子学院,安徽 合肥 230601)
“脑卒中”是一种危害大、发病率高的急性脑血管疾病[1],部分脑卒中患者遗留手部功能障碍,中风后3个月是康复训练的黄金时期[2],但是患者凭借自身难以控制和协调手部肌肉完成康复训练[3],基于康复训练设备的手部康复训练对于患者手功能恢复能起到重要促进作用[4-5]。
手部康复训练设备从结构上主要分为刚性执行机构[6-7]和柔性执行机构[8]。刚性执行机构是通过刚性构件将驱动力传递到人手并带动手指运动的手部康复训练设备,这类执行机构约束关节的驱动自由度并阻碍其自然运动,舒适性和安全性较差。相较之下,柔性执行机构因结构简单、舒适性和安全性较高、与人手贴合度高等特点,近年来发展迅速并逐渐成为康复训练方向研究的热点。柔性机构驱动方式[9-10]种类繁多,例如形状记忆合金(shape memory alloys,SMA)驱动、电活性聚合物驱动、磁驱动和气动驱动等。SMA驱动材料驱动频率低、输出力较小;电活性聚合物耦合驱动速度慢、效率低;磁驱动受磁线圈的影响,制造过程比较复杂;相较于以上驱动方式,气动驱动技术成熟、反应速度较快、控制简单,被广泛应用于手部康复训练设备。目前已有不少采用气动驱动方式制作的康复训练设备。文献[11]研制的康复训练手套集成了5个软纤维增强型执行器,能够起到较好的训练效果,但该手套需要较大驱动力,与人手的贴合度较差;文献[12]通过改变指节单元不同部位纤维增强体结构,让执行器在运动过程中很好地贴合手部,同时避免了约束平台结构,但该执行器在设计过程需要复杂的跟踪传感器辅助且制作工艺复杂;文献[13]采用均匀气腔研制MRC-Glove辅助人手弯曲,提高了指节单元与手指的贴合度,但驱动过程需要复杂的约束平台。
除结构以外,控制方法也是决定康复训练设备训练效果的重要因素。目前,国内外科研机构的康复训练设备都以被动式控制[14-15]为主,康复训练周期较长,效果较弱。文献[16]进行了控制方式的创新,提出一种基于三维手势体感(Leap Motion)传感器的康复训练设备;但是基于三维手势识别的控制需要使用者做出手势并完成识别后才能完成控制,仍然无法实现主动控制。
综合考虑康复训练设备的执行机构和控制方法,本文基于肌电控制设计一种半定制主动式柔性气动康复训练手套。借助ABAQUS软件进行仿真设计手套结构尺寸,通过研究符合手部特征的单指执行器单元确定各个气腔尺寸,设计长、短指节并用长度可调节的连接部件连接;制作工艺方面,基于3D打印技术和流体自成型技术制作执行器并集成到织物手套上;控制方法上,采用表面肌电控制方案,利用支持向量机(support vector machine,SVM)算法实现手势分类,完成对自制柔性康复训练手套的主动式控制。制作的柔性康复手套具有与手部贴合度高且结构简单的特点,可以进行抓取和镜像康复训练,康复训练具有积极的效果。
1 柔性手套的设计与制作
柔性康复训练手套设计制作包括单指执行器单元的设计、仿真和测试以及长、短指节的制作和测试。
1.1 单指执行器单元的设计
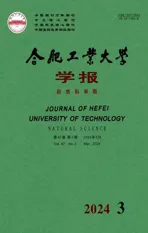
本文康复训练手套是通过充气使气腔膨胀相互挤压完成弯曲行为的。为提高手套单指执行器单元在弯曲过程中与手指的贴合度,设计手指的关节部位对应多个小气腔,指节部分仅保留较窄的气道。人手弯曲、均匀气腔及非均匀气腔的单指执行器单元如图1a所示,可以看出具有均匀气腔的指节单元弯曲时呈半圆形。均匀气腔模型和非均匀气腔模型与人体手指弯曲的对比如图1b所示,可以看出均匀气腔模型明显不符合人体手部弯曲特征,与人手部贴合性较差,而非均匀气腔模型更适合人手部特征。
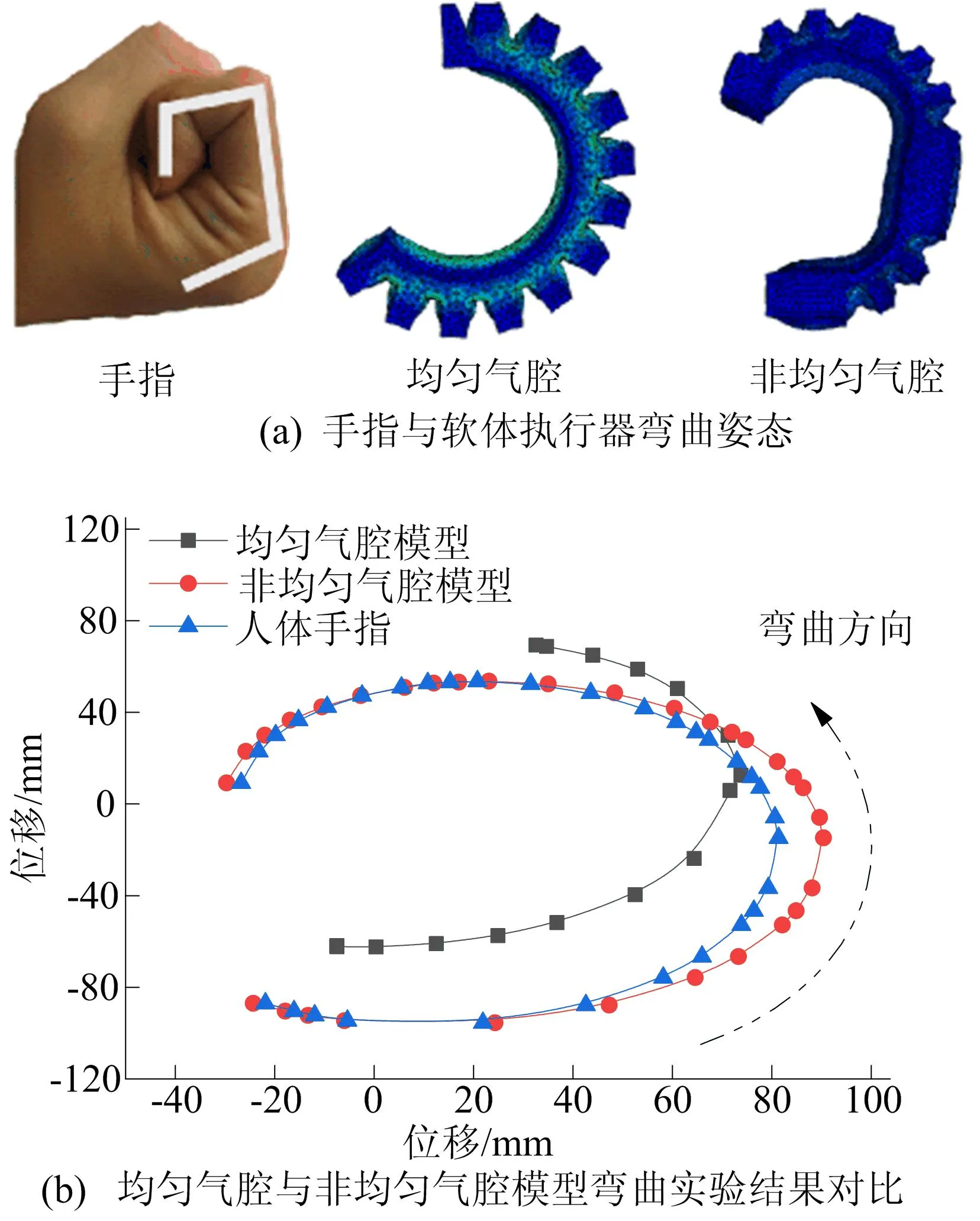
图1 模型运动轨迹分析
为扩大执行器的适用范围,考虑到人手从靠近手掌近侧指骨开始分为近节指骨、中节指骨、远节指骨,且不同人手指在近节指骨部分差异最大,将执行器设计成长、短指节,并借助长度可调连接部件相连。
单指执行器单元如图2所示。从图2可以看出,手指远节指骨、中节指骨对应长指节,近节指骨对应短指节,长、短指节由可任意尺寸调整更换的连接部件连接。
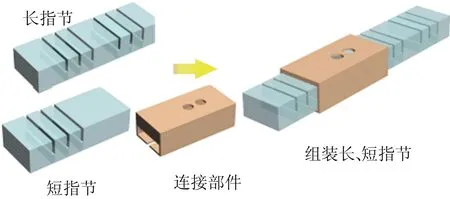
图2 单指执行器单元
1.2 非线性力学建模与仿真
康复训练手套的单指执行器单元采用硅橡胶材料制作,软材料具有非线性力学特性,由非线性力学理论[17]分析可知,几何尺寸参数是影响气腔弯曲性能的主要因素。
影响气腔弯曲角度θ的主要参数有内部气腔压强p、气腔高度h、底层厚度d。气腔膨胀前、后的示意图如图3a所示,可以通过控制变量法进行有限元分析。
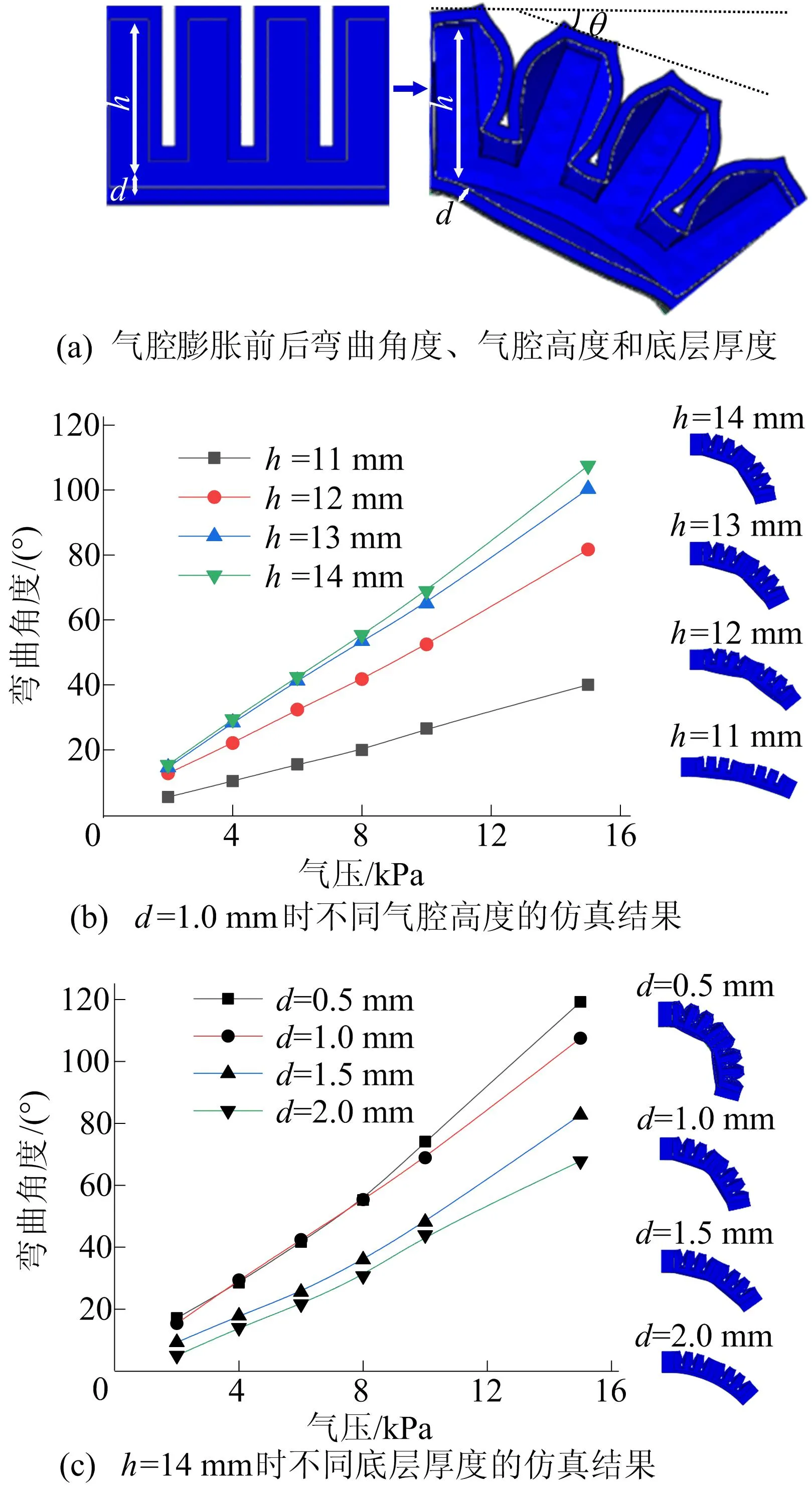
图3 指节弯曲角度仿真结果
当d=1.0 mm,h为11、12、13、14 mm时的指节弯曲角度仿真结果如图3b所示。从图3b可以看出,在相同底层厚度和气压下,随着气腔高度h的增加,弯曲角度呈现增大趋势,且弯曲角度随着内部气压的增大而增大。但气腔高度h过高不易装配,根据仿真结果,选择h=14 mm作为气腔高度参数。
当h=14 mm,d为0.5、1.0、1.5、2.0 mm的指节弯曲角度仿真结果如图3c所示。从图3c可以看出,在相同气腔高度和气压下,随着底层厚度d的增加,弯曲角度呈现减小的趋势,且弯曲角度随着内部气压的增大而增大。
由仿真结果可知d=0.5 mm时弯曲效果最好,但底层厚度过小会导致无法加入限制层且存在涨破风险,而底层厚度过大会降低软体执行器柔性,气压驱动时弯曲角度达不到手指弯曲范围,根据仿真结果,选择d=1.0 mm作为底层厚度参数。
1.3 执行器指节制作
基于3D打印技术制作气动执行器模具,制作短指节流程如图4所示。
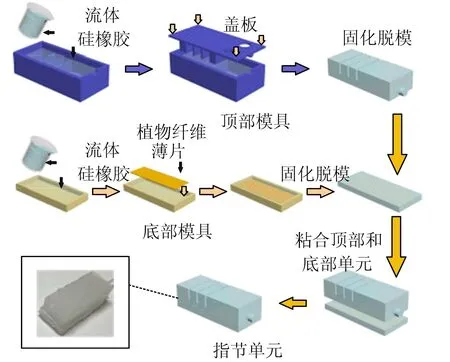
图4 执行器指节单元制作过程
设计并使用聚乳酸(polylactic acid,PLA)材料3D打印总体长43 mm、宽18 mm、高14 mm的顶部模具,总体长43 mm、宽18 mm、高1 mm的底部模具。红叶E615硅橡胶A、B胶以1∶1的质量比混合配置,将混合得到的流体硅橡胶放入真空机内抽真空去除气泡。在顶部模具中倒入流体硅橡胶,将同样使用PLA材料3D打印定制的长45 mm、宽20 mm、梳齿高14 mm的盖板嵌入流体硅橡胶,室温静置24 h后固化脱模,得到内部气腔高度h=14 mm、底层厚度d=1 mm的顶部模块;取底部模具,倒入流体硅橡胶,待硅橡胶还未凝固时,向硅橡胶中置入植物纤维薄片作为应变限制层,室温静置24 h固化脱模得到底部模块,并与顶部模块粘合,组合可以得到短指节。
利用同样方法制作长59 mm、宽18 mm、内部气腔高度h=14 mm的长指节。使用TPU软胶柔性弹性体3D打印制作长45 mm、宽20 mm、高14 mm的连接部件,制备单指执行器单元。
1.4 长、短指节及单指执行器单元性能测试
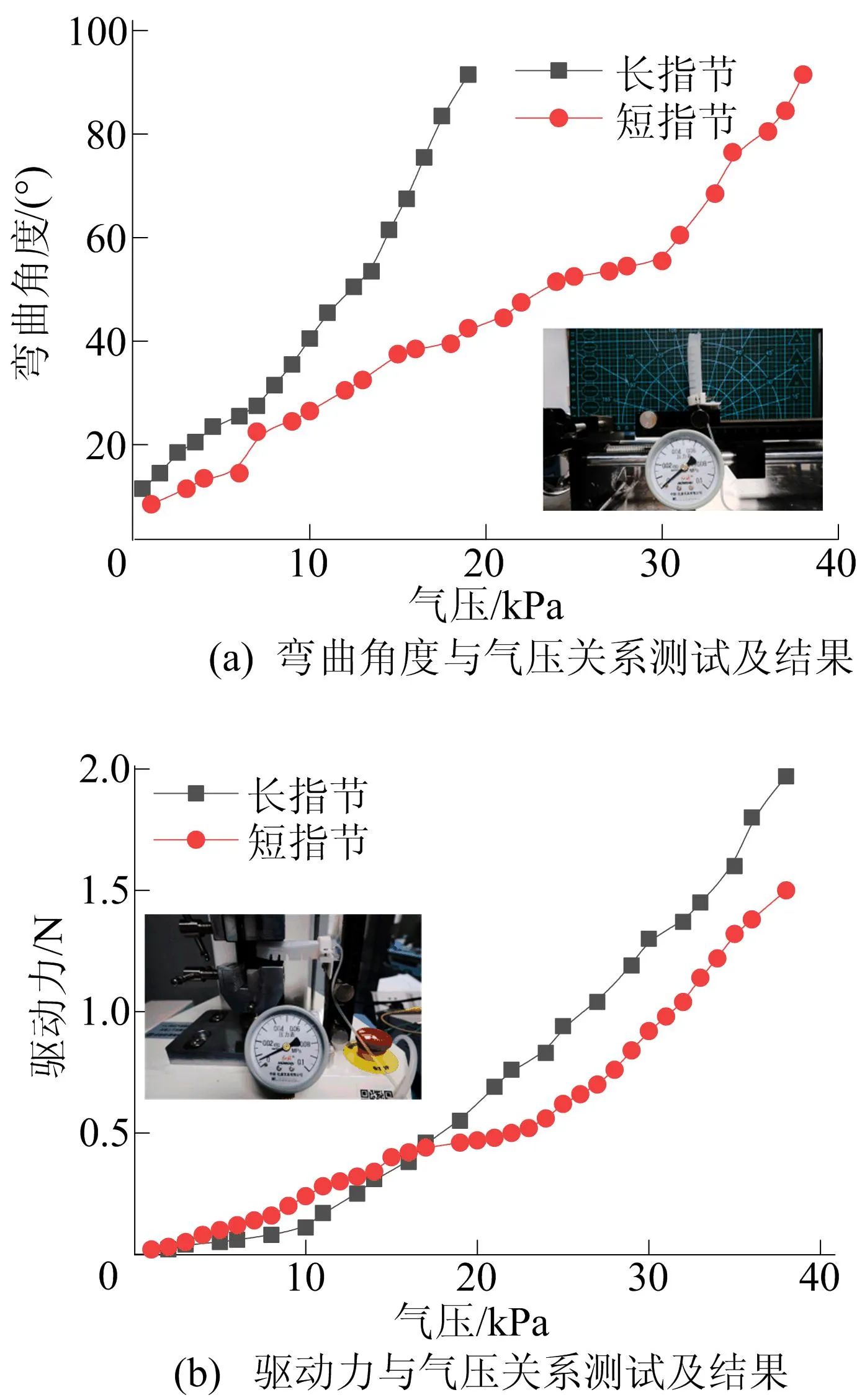
对长、短指节弯曲角度与气压关系、驱动力与气压关系进行测量,结果如图5所示。其中,图5a、图5b中的插图为测量装置。
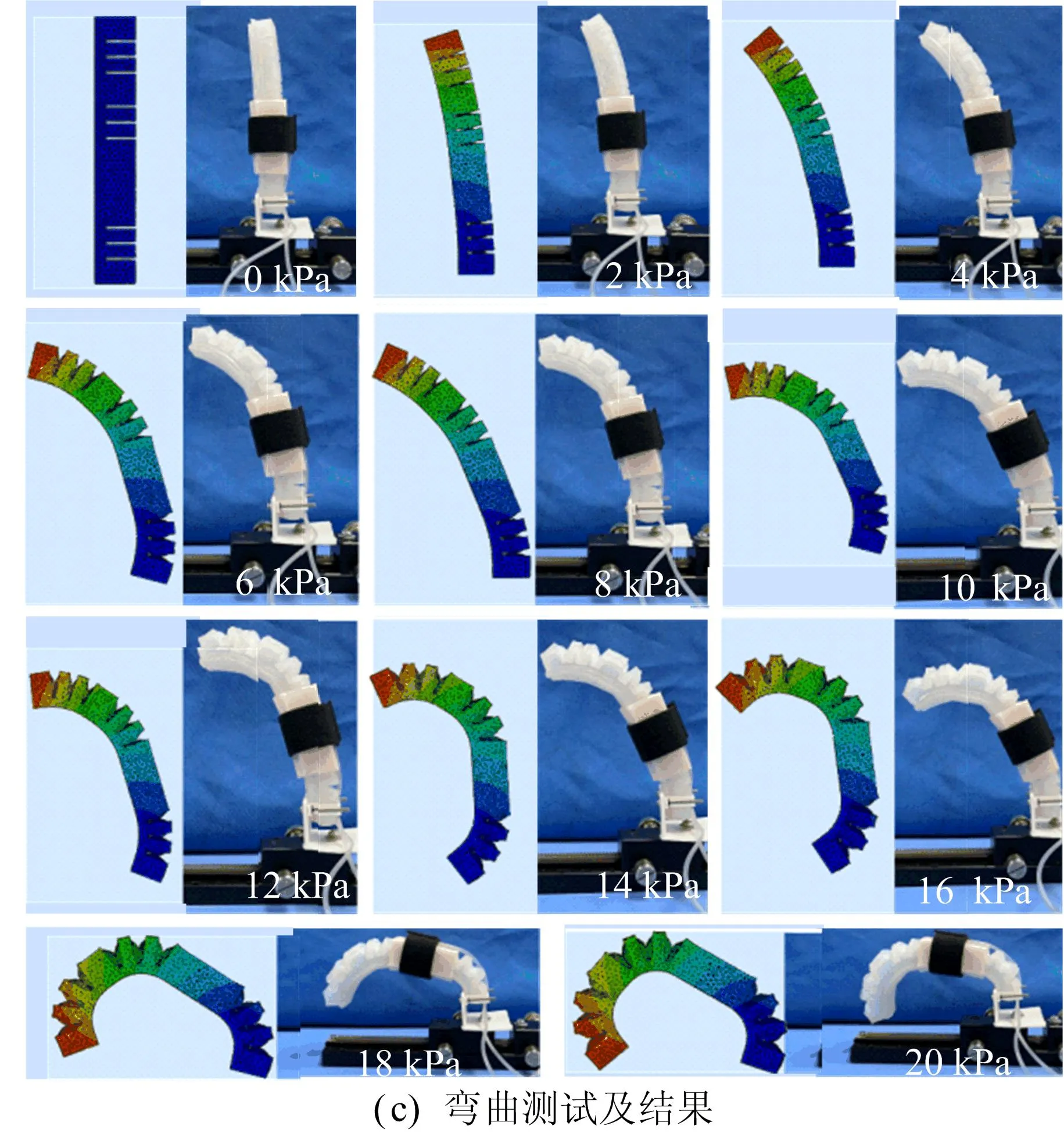
图5 弯曲角度与气压关系、驱动力与气压关系、弯曲测试及结果
从图5a可以看出,在内部气压20 kPa时,长、短指节分别弯曲90°、40°;从图5b可以看出,长、短指节在内部气压为17 kPa时内侧驱动力为0.50 N。
对单指执行器单元进行弯曲测试,结果如图5c所示。
从图5c可以看出,内部气压为0~20 kPa时,实物弯曲结果与仿真结果具有高度一致性。
2 肌电控制方案
控制方案的设计主要包括信号采集处理和气动控制系统的设计。表面肌电信号[18]是众多生物电信号中一种容易获取的生理反馈信号,在运动意图识别上有较高的精确性和鲁棒性。在人体小臂肌肉处采集表面肌电信号,并结合SVM算法用于判断人手的运动意图,进而实现主动控制执行器的运动。
2.1 肌电信号的采集处理
采用Myoware肌电传感器和生理电极片对肌电信号采集。Myoware传感器的2个采集电极和1个参考电极与生理电极片连接,粘贴在人体小臂肱桡肌处和关节处,采集微弱肌电信号并放大,通过滤波电路有效抑制噪音,再利用Arduino UNO单片机进行特征提取。
肌电信号具有模糊性特点,不同使用者在相同肌肉块采集的表面肌电信号具有较大差别,同一使用者在不同时间采集的肌电信号也有一定的差别,特征提取是肌电控制的重要环节。肌电信号特征包括时域特征、频域特征、时频域特征[19],不同手势的时域特征差异较大,因此提取时域特征进行分类。
对握拳、拇指与其他4指对指的5种手势识别的肌电波形和特征进行提取,不同手势肌电波形如图6a所示。
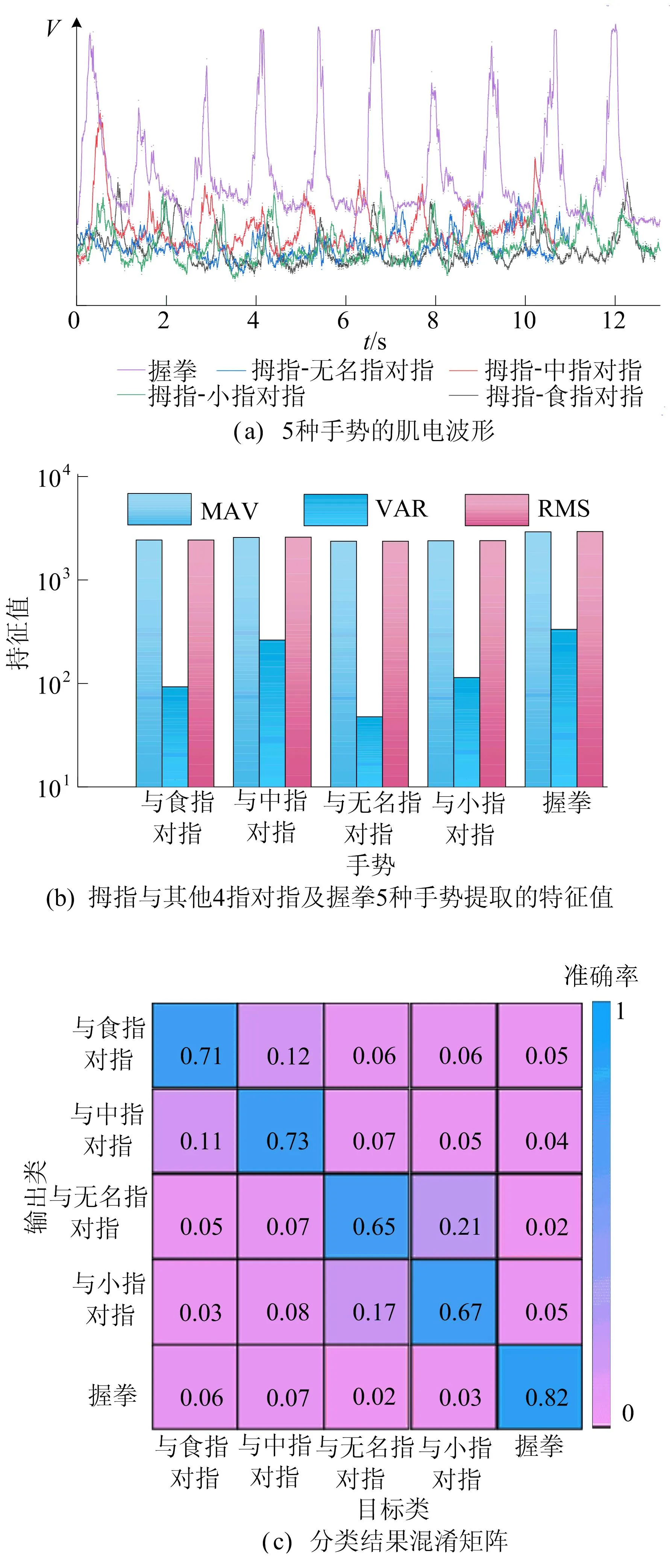
图6 肌电信号采集与处理
综合考虑执行时间、系统延时以及肌电信号的模糊与不平稳特征,每30 ms对滤波后的表面肌电信号进行检测,每次对30 ms内的表面肌电信号的最大评估值(maximum assessed value, MAV)、方差(variance, VAR)、均方根(root mean square, RMS)进行提取,结果如图6b所示。
由于肌电传感器的装配位置不同,当做出不同手势时,牵动的肌肉群与肌电传感器间具有空间差异,传感器采集的肌电信号幅值与波形存在差异,本文通过SVM算法进一步对信号进行分类。采用十折交叉验证方式得到分类的准确率,分类结果混淆矩阵如图6c所示。
从图6c可以看出:采用时域特征对5种手势分类效果较好;握拳手势与其他手势时域差异较大,具有最高识别率;拇指-无名指对指、拇指-小指对指动作牵动的肌肉群一致性较高,识别率相对较低。5种手势识别准确率较高,说明该识别结果可用于控制康复手套进而实现镜像康复训练。
2.2 气动控制系统的设计
表面肌电信号来源于神经细胞,产生于肌肉收缩前30~150 ms,降低气动系统延时可起到良好的主动控制效果,辅助完成镜像康复训练。气动系统设计过程如图7所示。
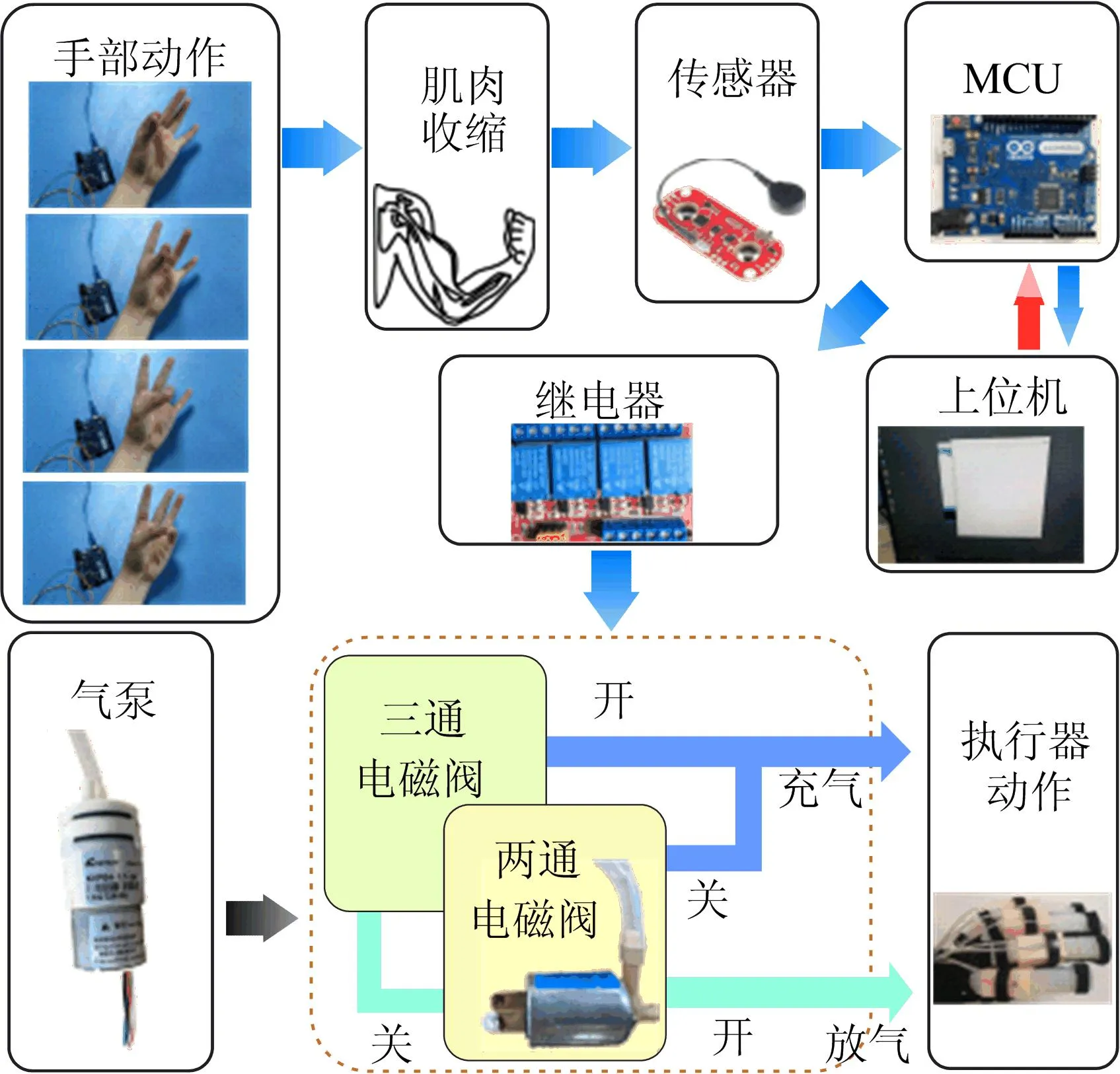
图7 气动控制系统设计过程
将一只手佩戴康复训练设备,另一只手依次做出拇指与食指对指、中指对指、无名指对指、小拇指对指动作,利用Myoware传感器采集相应手势的肌电信号,输出至单片机通过上位机显示,上位机回传的分类结果控制继电器的导通,实现泄压专用的两通电磁阀关闭,其他气流支路的三通电磁阀常态导通,气泵与执行器之间的气路导通,执行器充气弯曲,从而完成同样的手部训练动作;当做出舒展动作时,泄压电磁阀导通,两位三通电磁阀切换,执行器与泄压电磁阀之间气路导通,完成排气泄压,手指伸展,恢复到初始状态,完成镜像康复训练。
气动系统流程如图8所示。
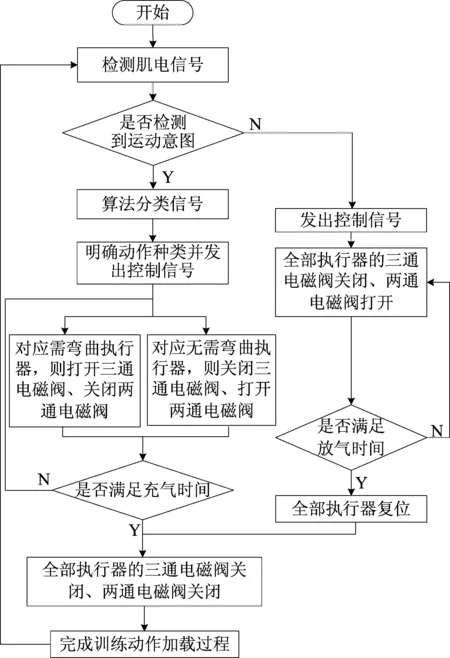
图8 气动系统流程框图
当上个训练动作结束需要执行下个训练动作时,若需要弯曲执行器,则三通电磁阀打开、两通电磁阀关闭以实现充气;若无需弯曲执行器,则三通电磁阀关闭、两通电磁阀打开以实现放气,并判断是否满足充气时间。当满足充气时间则做出训练动作,随后将全部执行器的三通电磁阀及两通电磁阀均关闭,完成训练动作加载过程;当不满足充气时间,则重新执行上述过程。当上个训练动作结束且无需执行下个训练动作时,全部执行器的三通电磁阀关闭、两通电磁阀打开以实现放气,并判断是否满足放气时间,若满足充气时间则全部执行器复位,否则重新执行上述过程,随后全部执行器的三通和两通电磁阀均关闭,完成训练动作卸载过程。
在此循环系统中,肌电信号反应速度快,不同手势状态能实时更新,及时实现不同手势之间的自由切换。
3 康复训练手套集成与应用
将单指执行器单元一体化,由于手指长度不同,利用可更换、尺寸可调整的连接部件将长、短指节整合成完整的单指执行器单元。
固定2个单指执行器的短指节,将2枚单指执行器形成一个夹爪对物品进行抓取,结果如图9a所示。从图9a可以看出,单指执行器单元形成的夹爪具有很好的抓取效果。
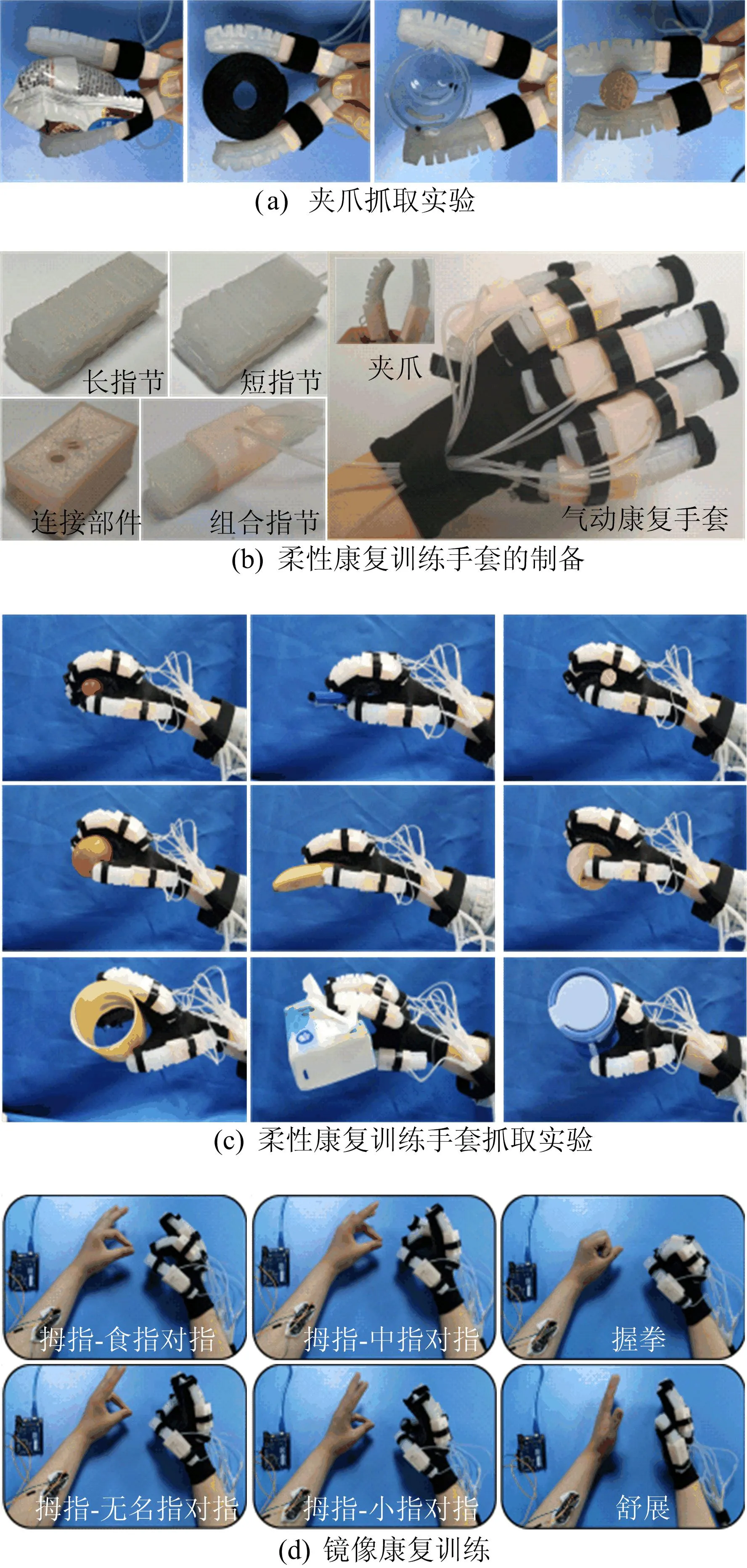
图9 康复训练手套的集成和应用
将魔术贴缝制在手套上,根据手的实际尺寸制作5个单指执行器单元,借助魔术贴固定在织物手套上完成柔性康复训练手套的制备,如图9b所示。
将需训练的手佩戴手套,借助肌电信号获取另一只手的运动意图,如图9c所示。从图9c可以看出,在康复训练手套的帮助下,该手成功抓取物体,表明制作的康复训练手套可以辅助抓取康复训练。
手的镜像康复训练如图9d所示。从图9d可以看出,根据运动意图,康复训练手套实现了5组手势的镜像康复训练,有效促进大脑神经元重塑[20],加速手部康复。
4 结 论
为了提高康复训练的舒适性和安全性,本文基于仿生原理,根据人体手部形状,设计一种半定制柔性康复训练手套。通过数学建模和有限元仿真分析,得到合适的柔性执行器结构尺寸参数;对柔性执行器的长、短指节分别进行弯曲角度、驱动力以及连接部件整合的单指执行器单元弯曲测试发现,单指执行器单元满足手指康复训练需求;将单指执行器单元一体化后的康复训练手套借助SVM算法识别人手运动意图,从而辅助完成镜像康复训练。
在下一步的工作中,拟进一步通过增加表面肌电信号采集通道数和优化特征提取算法的方式实现精确手势识别,提高手势识别的准确率。