Xbar-R 控制图在绞吸挖泥船疏浚施工中的应用
2024-03-30费子豪李权真周春艳伍正成王旭龙
费子豪,李权真,周春艳*,伍正成,王旭龙
(1.河海大学港口海岸与近海工程学院,江苏 南京 210024;2.中港疏浚有限公司,上海 200136)
0 引言
近年来,绞吸船因其疏浚产效高、挖掘能力强、可控性好,已成为全世界应用最广泛的一种挖泥船型。绞刀是此类挖泥船在疏浚施工中最关键的挖掘部件,通过螺旋式绞刀头的自身旋转和绞刀的横移扰动土体,切削土层,控制合适的水下泵吸入真空,将泥水混合体输送到指定区域,完成航道整治和吹填造地等工程。由此可见,绞刀的挖掘性能与横移参数设定和泥泵吸入性能对绞吸船的产能影响很大。
目前,国内外一些龙头疏浚公司已经开发智能疏浚系统。在国际上,荷兰IHC 公司与代尔夫特理工大学合作研制的最新一代自动泵送控制器(APC,Automatic Pump Controller)以及自动挖掘控制器(ACC,Automatic Cutter Controller)是智能疏浚技术的最高成果之一。在国内,中交上航局积极引进核心技术,投资建造了代表国内耙吸挖泥船智能水平最高的疏浚双子星——“航浚6008”轮、“航浚6009”轮[1-2]。但挖泥船在实际施工作业中各类参数设置有着相互串联和制约的复杂关系,对参数设置结果没有严谨的“好”与“坏”的评判标准,复杂多变的疏浚施工环境也决定了疏浚作业无法像棋盘环境一样轻易地复盘和完善自己的“知识库”。
为此提出基于单值-移动极差(Xbar-R)控制图[3]的绞吸挖泥船横移挖泥操作参数范围的设定方法,可进一步完善绞吸船智能疏浚系统的功能。控制图是一种将显著性统计原理应用于过程控制的图形方法,它能对生产过程进行分析评价,根据反馈信息及时发现系统性因素出现的征兆,便于及时采取措施消除其影响,使过程维持在仅受随机性因素影响的受控状态,以达到控制质量的目的。目前,Xbar-R 控制图已经广泛应用于定额管理、检测结果质量控制、生产工艺参数、测量标准质量控制等领域,侯兴勃等[4]利用控制图技术实现测量标准的质量控制,王玲[5]将控制图思想成功应用于阳极生产工艺参数上。
本文利用控制图对绞吸船横移挖泥操作过程中水下泵吸入真空参数范围进行预设,可为船员操作提供参考,实现对水下泵吸入真空参数实时控制,有助于在施工过程中出现异常情况时,能够及时追查原因并处理。此外,给出水下泵吸入真空参数的控制上限和控制下限,有助于船员操作的标准化,选择最优结构和参数,进而提高船舶生产率。此方法也可应用于其他操作参数的理论设定。
1 挖泥操作特点及工程概况
1.1 绞吸式挖泥船操作特点
水下作业“看不见、摸不着”仍是疏浚施工最典型的特点。操作过程中,驾驶员大都参考船用SCADA 系统仪表反映出的参数信号,对驾驶台相关操作手柄、旋钮和拨钮实现挖泥操作。
横移时,一般结合水下泵吸入真空值、排出压力值及流速等参数判断实际挖泥状况。当仪表指针接近参数范围上限而仍有上升趋势时,应降低横移速度;当仪表指针接近参数范围下限而仍有下降趋势时,应提高横移速度。
1.2 工程概况
江苏滨海LNG 项目疏浚工程位于江苏省盐城市滨海县滨海港区,江苏沿海中北部的海岸最突出部、废黄河口以北,中山河以南,地理坐标为34°18'N,120°16'E。工程位置示意图见图1。
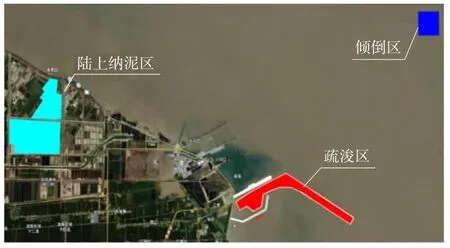
图1 工程平面位置图Fig.1 Location of the project plan
施工区域土质坚硬,施工区属于河口三角洲相沉积层,土质主要为密实粉砂,不易坍塌形成边坡,采用薄层水力切削方式开挖施工效率低。此外,工程受台风影响天数多,冬季寒潮大风频发,全年涌浪、大雾和强对流等恶劣天气较多,根据六合庄海洋站实测波浪资料统计,施工区风浪、涌浪较大,浪高1.0 m 以上波浪天数占30%以上;另外涨落潮时流速较急,最大可达5 kn 以上,严重影响施工安全。
这些因素对绞吸船施工人员的技术水平、经验和责任心是极大的考验,操作人员的良莠不齐是直接影响工程质量和施工效率的最主要不可控因素。因此,针对复杂工况积极尝试使用基于Xbar-R 控制图等理论方法,帮助操作人员在多变的生产环境中,对疏浚过程快速、高效地进行性能指标优化决策,合理分析和预测产能需求的优势显得十分必要。
2 参数控制图的数据选取原则与控制图原理
2.1 参数控制图的数据选取原则
通常情况下,绞吸船疏浚施工需要进行横移、换向、倒台车和移锚等操作,整个施工过程的实时数据均由船舶集控室计算机进行监控记录。针对挖泥操作过程,计算机监控系统一般每2 s 记录1 次,进行原始数据分析时必须筛选出具有连续性的有效数据进行分析。
1) 选取PLC 柜仪表显示生产率持续维持在正常水平的数据,排除因管线泄漏、堵塞、拗弯等不能正常施工造成船舶停工或船机设备故障时的数据。
2) 选取工况条件和施工区域土质等边界条件相近的数据。
3) 不同绞刀头需选取在同一挖泥深度的施工数据。
2.2 控制图原理
疏浚工程中涉及到的质量问题大都可以借助应用统计方法进行分析解决,结合控制图的上下限判断疏浚过程是否处于稳定状态,控制图法是将过程核查数据画到有预定控制界限的控制图上,若数据处于控制界限以内,表明测量过程处于统计控制状态;反之就是过程失控,应采取纠正措施直到再受控[6]。
根据控制图控制的数据不同,可以分为两大类,即计量值控制图和计数值控制图[7]。绞吸船施工工艺参数属于计量值,适用于计量值控制图。根据疏浚施工操作参数数据特点,选择计量值控制图中的Xbar-R 控制图,其中单值控制图用于控制平均值,极差控制图用于控制离散程度[8]。如果在横移操作过程中有参数值超过界限以外,就可以判定为异常。
每批样本中只包含1 个数据,即n=1 的情况下,可以采用单值-移动极差控制图分析工艺过程的统计受控状态。移动极差指相邻两批数据之差的绝对值。将移动极差值标示在控制图上就是单值-移动极差控制图。控制界限的一般公式为:
单值图:
式中:UCL为单侧上界;LCL为单侧下界;CL为中心线;X为过程均值;Rs为样本标准差;E2为常数。
移动极差图:
式中:D4、D3为常数。各常数取值见表1。
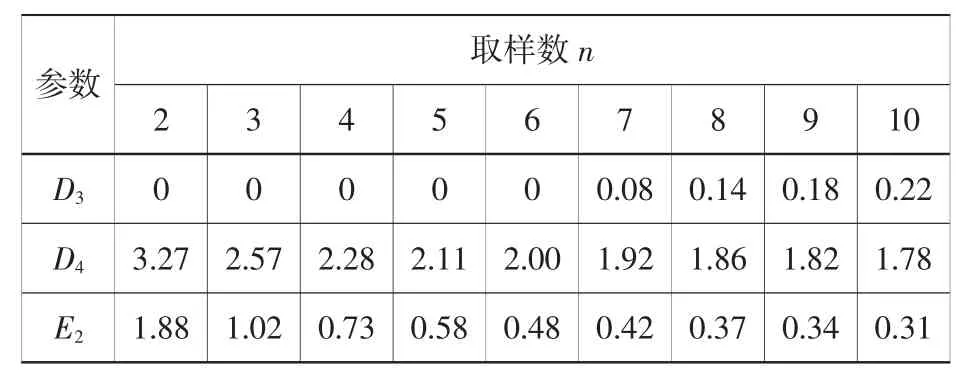
表1 样本各参数取值表Table 1 Values of each parameter in the sample
3 工程实例
3.1 工艺参数设定
工程地点位于江苏省盐城市滨海县滨海港区,疏浚区土质以粉质土为主,夹杂少量可塑黏土。分2 层进行施工,第1 层挖深至-8.5 m,第2 层挖深至-11.0 m,岸管长11 532 m、水下管长812 m、浮管长622.6 m,总长为12 966.6 m,使用水下泵、舱内泵三泵施工。疏浚施工至底高程-10 m时,土质硬度明显发生变化,呈中密—密实状,平均标贯击数N=25.4 击,加上防波堤未形成有效掩护条件,受涌浪影响绞刀功率浮动较大,正刀施工时滚刀严重,横移移动速度受限。典型施工时挖泥船主要施工参数见表2。

表2 挖泥船主要施工参数统计Table 2 Statistics of main construction parameters of dredgers
3.2 六臂绞刀和七臂绞刀的生产率对比
硬质土施工中要想获得最大的生产效率,通常是减小绞刀泥层切削厚度。为此,“新海豚”轮及时更换七臂绞刀头进行施工,在相同的绞刀转速和横移速度下,由于刀臂间距的不同,七臂绞刀与六臂绞刀所切削的块状泥层的厚度比约为6/7。
按照上述数据筛选原则筛选数据,按照不同绞刀类型的实时生产效率数据绘制正态分布直方图,对比不同类型绞刀施工效率差异,选取生产效率均值较大、离散程度较小的绞刀类型作为标杆进行研究。图2 为在施工边界条件基本一致的情况下,收集同一挖泥手在“新海豚”使用六臂绞刀与七臂绞刀的每2 s 操作数据(共计1 200 组)绘制的施工效率对比图,表3 为绞刀生产效率对比。

表3 绞刀生产效率对比Table 3 Comparison of cutter production efficiency
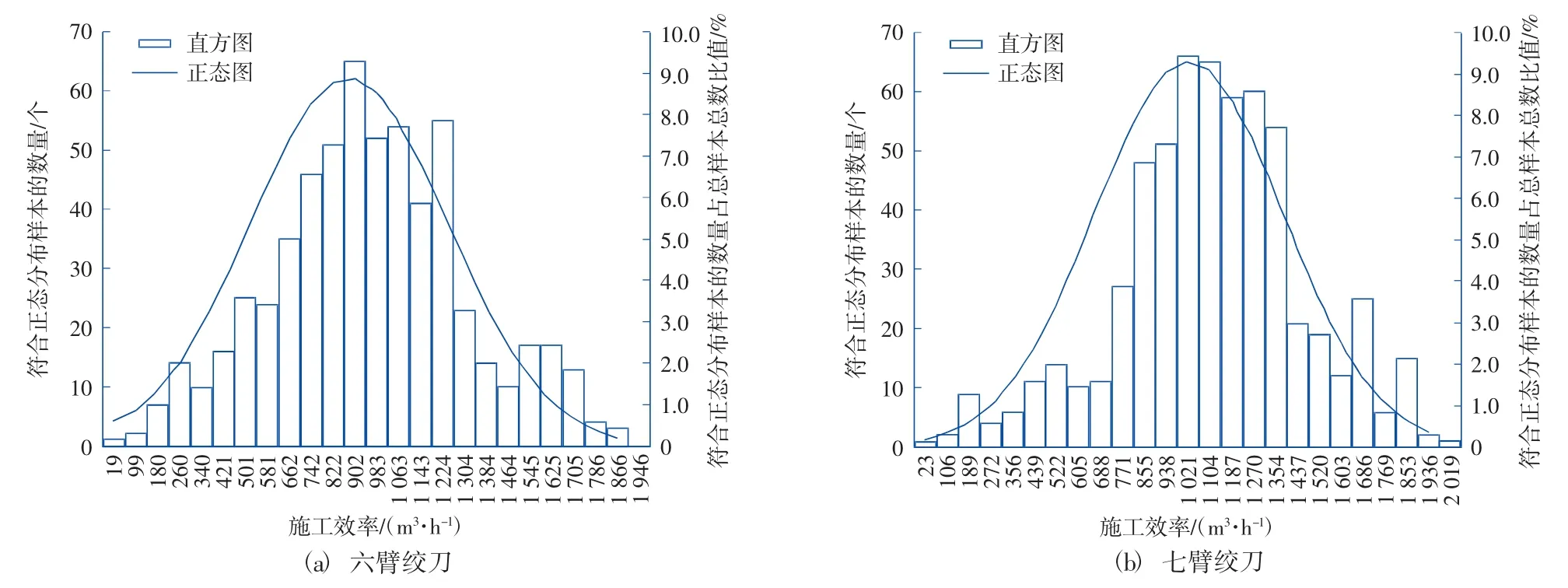
图2 不同绞刀施工效率对比图Fig.2 Comparison of construction efficiency of different cutters
由图2、表3 可知,六臂绞刀和七臂绞刀的平均生产率相近,七臂绞刀为1 067 m3/h,稍高于六臂绞刀,七臂绞刀生产率的标准差为152 m3/h,远小于六臂绞刀的375 m3/h,说明七臂绞刀的施工较为稳定,应选取使用七臂绞刀时的施工参数作为研究对象。
4 计算控制界限并绘制控制图
2021 年10 月18 日,“新海豚”轮更换七臂绞刀后进行港池疏浚典型施工,施工区水域宽阔,风力3—6 级,浪高1.2~2.7 m,产量仪表显示正常,操作平稳。由于船舶自动保存的2 s/次的数据量过于庞大,为便于计算分析,选取施工边界条件和工艺参数相近的时间段读取水下泵吸入真空实时数据(表4),并分别计算每个时段样本数的平均值和极差。
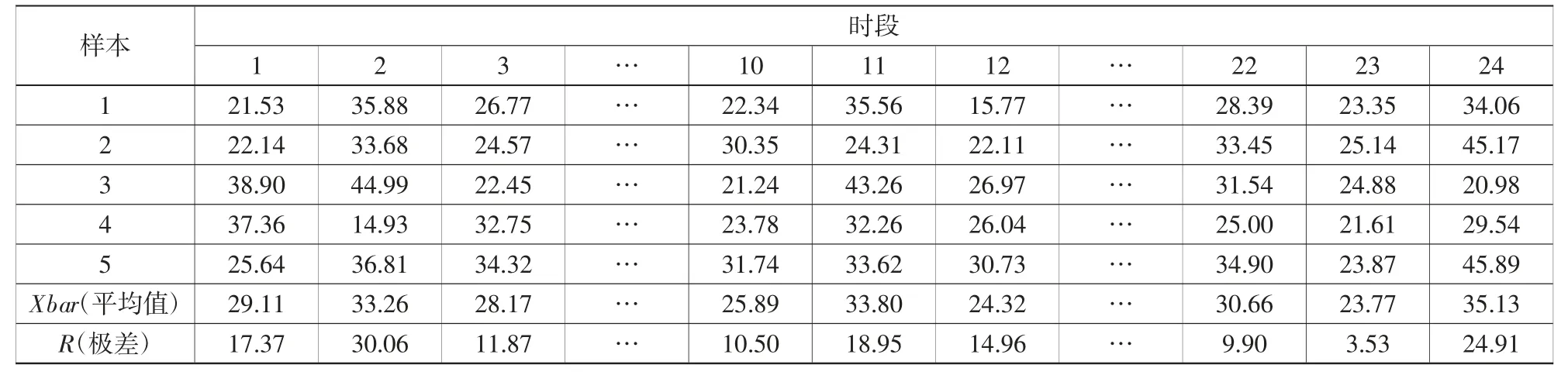
表4 水下泵吸入真空实时数据Table 4 Real time data of underwater pump suction vacuum kPa
其中:每批样本中包涵5 组数据,即n=5,查阅表1 得到常用参数值D3=0,D4=2.11,E2=0.58,利用STDEV 函数计算得到样本标准差为16.951。根据上述数据计算各组均值、极差得到Xbar-R 控制图上下限,见表5。
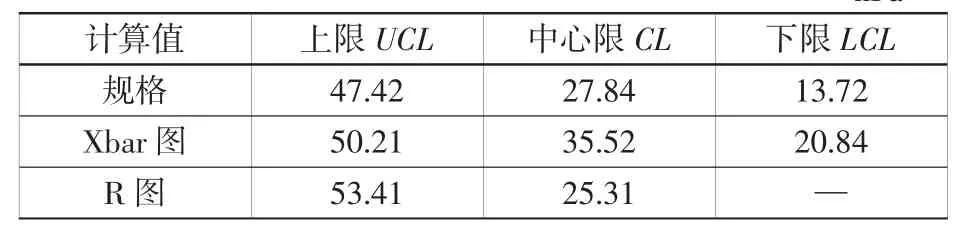
表5 Xbar-R 控制图上下限Table 5 Upper and lower limits of Xbar-R control chart kPa
利用绞吸船船载计算机监控系统所记录的实时2 s/次数据计算控制界限并描点绘制水下泵吸入真空单值-移动极差控制界限及控制图。
4.1 单值控制界限及控制图
其中,CL=X=35.52 kPa,由计算控制上下限得知,水下泵吸入真空参数值范围为(25.69 kPa,45.35 kPa),控制图见图3。
根据图中样本数据状态显示:第4、7、9、19 组数据超出界限;控制图中控制界限内的数值多位于中心线以下。根据船舶施工日志和每2 s 数据对上述情况进行具体分析,发现该时段内除了第9 组瞬时流量和产量均偏低,其余时间段产量计显示正常,结果确认为第9 组施工时段吸入管内存在水下障碍物,导致水下泵吸入真空参数偏大,而其余3 组则是由于施工区底质坚硬,操作员控制绞刀回摆时横移速度不当。
4.2 移动界限控制界限及控制图
其中,CL=X=25.31 kPa,由移动极差控制限得知,当施工人员在连续2 次下达施工指令时,应保持水下泵吸入真空值的波动在53.4 kPa 以内,移动界限(极差)控制界限及控制图如图4 所示。控制图可以起到报警的作用,根据图中样本数据状态显示:第4 组数据明显超过界限值,此时应该立即排查吸入管是否存在障碍物或排泥管是否发生破裂,采用相对应的措施,消除异值产生原因,保证疏浚施工质量。

图4 移动界限(极差)控制界限及控制图Fig.4 Moving boundary(range)control limits and control diagram
5 结语
1) 水下泵吸入真空参数值范围为(25.69 kPa,45.35 kPa),一般将水下泵吸入真空值控制在-40 kPa 左右;
2) 由移动极差控制限得知,连续左右横移时应保持水下泵吸入真空波动在53.4 kPa 以内;
3) 经现场施工试验,基于Xbar-R 控制图计算的参数范围测算结果应用于后续工程实际中,验证结果较好,能有效降低施工作业中人为因素对施工效率的影响,保证挖泥船的持续作业效率。
传统的工前测试仅凭疏浚施工员的经验操作不仅耗时耗力,且充斥着诸多安全隐患。可考虑基于数理计算开发出一套更为精准、高效的算法逻辑,做成实时计算程序或软件,作为工前辅助设计的参考或驾驶员施工过程的调整依据,以保证后续挖泥船施工的平稳性和连续性。
