抓斗挖泥船抓斗机自动控制技术
2014-12-18缪袁泉田雨张红升丁琪
缪袁泉,田雨,张红升,丁琪
(1.中交疏浚技术装备国家工程研究中心有限公司,上海 201208;2.长沙理工大学,湖南 长沙 410114)
上世纪90年代以来国家大力扶持航运和码头建设,航道疏浚和码头建设离不开挖泥船的参与。这些年来国内建造了各种类型的挖泥船,其中抓斗式挖泥船体积小、挖泥效率高、环境适应性强,在航道疏浚尤其是码头建设和维护中起着举足轻重的作用。人们对挖泥船的要求是高性能、高效率、自动化、环保型。满足这些要求除了用先进的疏浚设备外,还要配有高自动化、高智能的疏浚控制系统。
1 抓斗机自动控制需求
抓斗挖泥船抓斗机挖泥周期分为3个核心过程:挖泥、卸泥、抓斗机旋回排斗。纯手动控制时,3个挖泥过程都需要人工进行复杂的控制组合方能完成。人工操作频繁容易疲劳,工作效率低,而且由于人为操作的局限性控制精度不高[1]。
针对上述3个控制过程我们提出了6项自动控制技术:
1)挖泥:包括定深、深挖、平挖、碎礁。
2)卸泥:阶梯卸泥。
3)抓斗机旋回排斗:自动排斗。
2 抓斗机自动控制技术
2.1 挖泥过程
挖泥过程主要是对抓斗升降和开闭的组合控制。抓斗控制具有载荷变化大、快升、快降、急停的特点,所以控制要求较高。根据不同挖泥工况需求,挖泥过程分为:定深、深挖、平挖、碎礁4种模式。
2.1.1 定深
定深控制模式下,需要事先设置挖泥深度。抓斗下降至设定深度后,可自动减速停止。抓斗抓泥完毕并且完全合上斗口时,便可自动进入提升动作,然后通过提升手柄加速抓斗的提升速度。定深自动控制模型如图1。为了保证抓斗深度计算精度,在定深挖泥前应将抓斗打开并下降至贴近水面位置,校准计算基准点。

图1 定深控制模型Fig.1 Depth-keeping control model
为了保护抓斗控制过程,系统需要设定以下参数:挖泥深度、上限停止设定、下限停止设定、减速设定点。“挖泥深度”为设定的挖泥深度停止点。“上限停止设定”为抓斗提升高位停止点。“下限停止设定”为抓斗下降低位停止点。“减速设定点”是为了避免抓斗着底时的冲撞,让抓斗在设定的停止深度数米之前开始第1次预减速,然后缓缓下降至停止深度并完全停止。“减速设定点”可以按照设定的“挖泥深度”为基准反向设定。例如:“挖泥深度”设定为10 m,“减速设定点”设定为2 m时:抓斗快速下降到10-2=8 m时,经第1次自动预减速后,再缓速下降2 m后自动停止在“挖泥深度”设定点。
2.1.2 深挖
深挖控制模式又称“取泥模式”,在以挖泥产量为主,不必注重挖泥深度的作业时,使用深挖控制可以避免空挖情况,大大提高挖泥效率[2]。深挖控制是指在抓斗下沉到挖泥面闭斗挖泥过程中,将提升卷筒置于半离合的摩擦滑动状态,以适当的拉力提带着钢缆,以避免提升钢缆过于松散造成乱排现象的同时,让抓斗一边沉降一边闭斗挖泥,这样可以大大增加单斗的挖泥量,提高挖泥效率。深挖自动控制模型如图2。

图2 深挖控制模型Fig.2 Deep dredging control model
深挖模式有手动和自动两种模式。手动模式下提升卷筒半离合摩擦力大小由人手动控制,一般采用脚踏板的方式对半离合摩擦力进行连续控制。自动模式下半离合摩擦力由程序根据实际情况进行调节,无需人工干预。
2.1.3 平挖
平挖控制模式的基本原理是在闭斗挖泥过程中,适当下放抓斗。因为下放的速度和深度与抓斗尺寸、当前开口度、土质等参数有关,所以平挖模式的核心是建立抓斗随闭斗过程的复合控制模型。实际设计过程中一般将抓斗尺寸、抓斗开口度、土质3个参数作为条件放在1个三维数组中,将抓斗下降速度、下降距离作为输出放在1个二维数组中。当抓斗开始闭口抓泥时,抓斗的实时开口度与三维数组中的开口度比较,立即计算出此时提升钢缆的下降速度和下降距离,让抓斗随闭口动作一点一点下沉,通过这种复合运动使挖掘面接近平整。因为部分工程可能需要在平挖的同时进行定深控制,所以平挖和定深可以同时有效。平挖自动控制模型如图3。
2.1.4 碎礁
碎礁作业时,提升卷筒的钢缆上装碎礁重锤,利用重锤自由落降冲击力击碎水中礁石。碎礁作业重锤较重,下降速度快,刹车冲击力大,所以其控制要求很高。碎礁控制模型如图4。
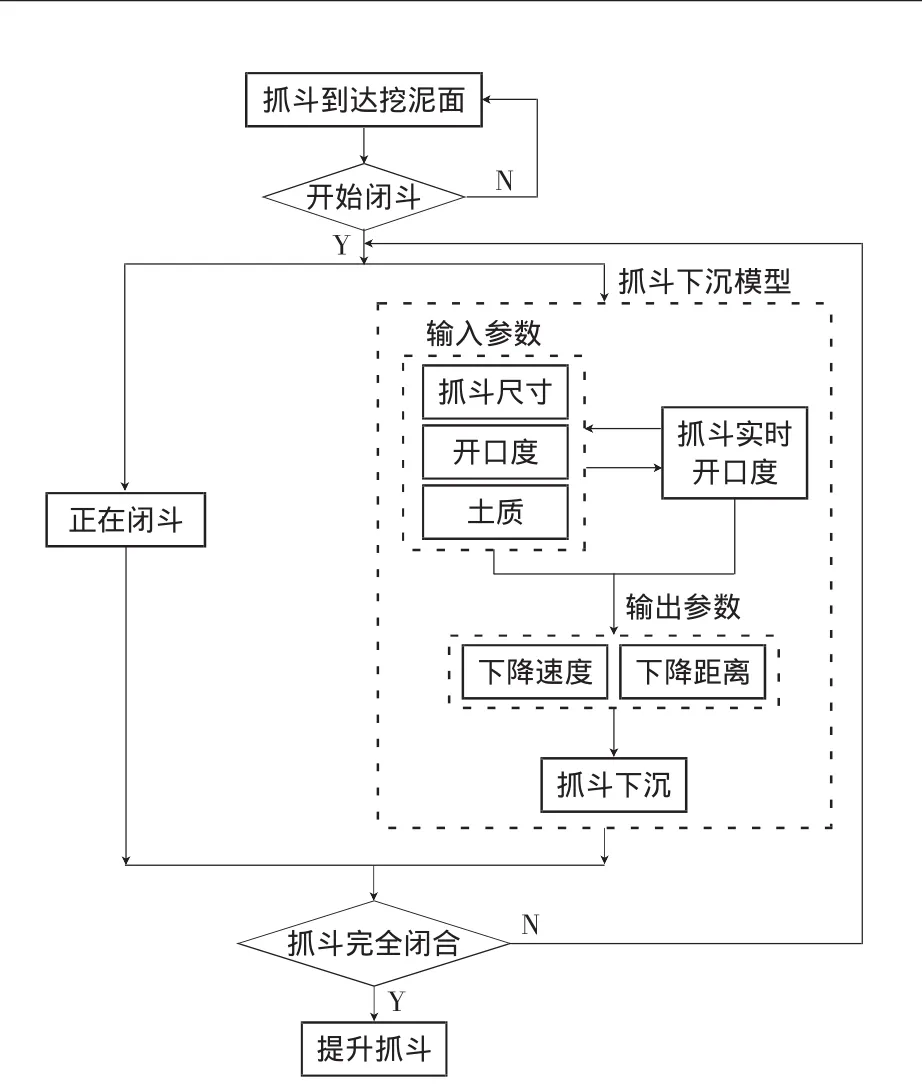
图3 平挖控制模型Fig.3 Flat dredging control model
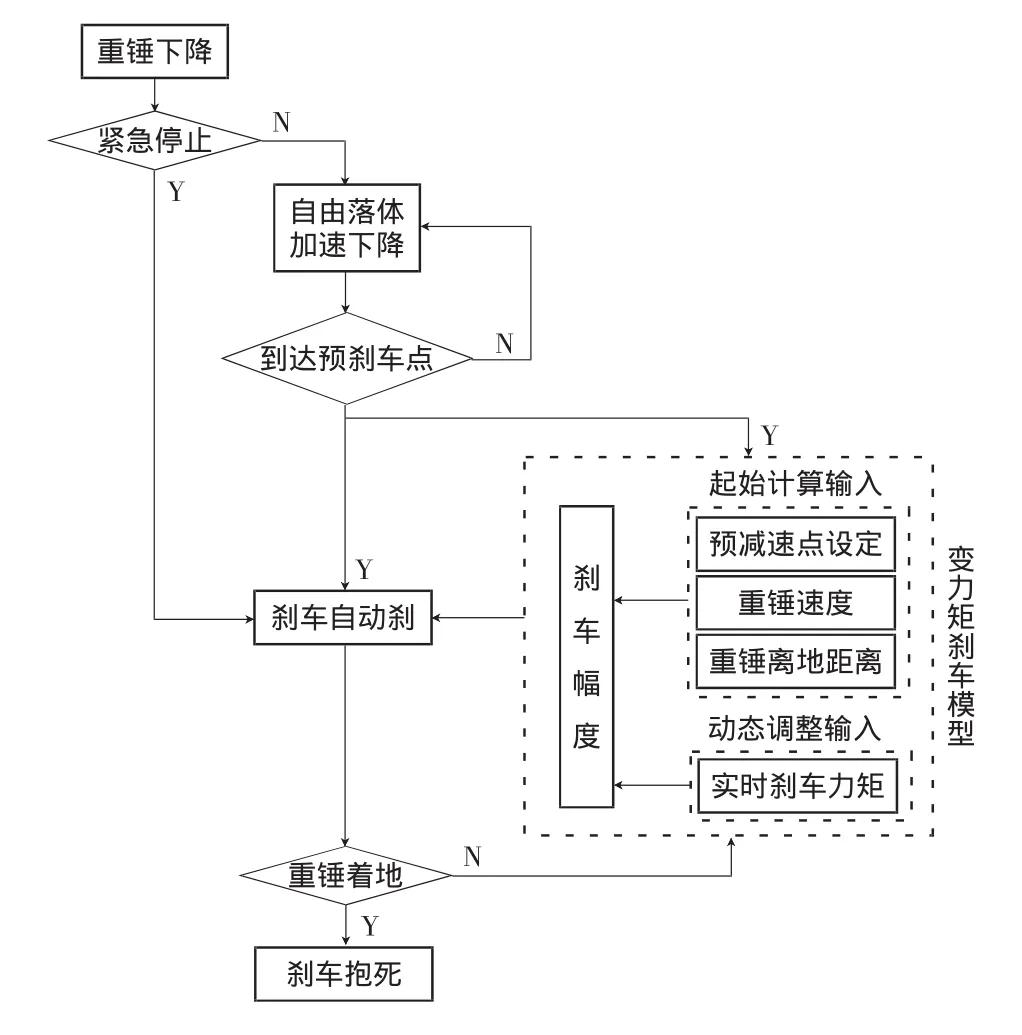
图4 碎礁控制模型Fig.4 Rock breaking control model
在系统未触发紧急停止的情况下重锤自由落体。为了防止重锤突然着地停止后钢缆松弛、乱排或缠绕,系统需要事先设定重锤预刹车点(重锤距地面的高度),当重锤下降至预刹车点时“变力矩刹车模型”根据预减速点设定值、重锤速度和重锤实时离地距离计算出起始刹车幅度[3],待实时刹车力矩反馈后动态调整刹车幅度以保持刹车力矩的恒定,在尽可能小影响重锤自由落体的条件下给钢缆一个保持钢缆紧致的刹车制动力矩。当系统检测到重锤着地后,刹车系统抱死,钢缆停止放出。
2.2 卸泥过程
卸泥过程中,如果抓斗瞬间全部打开,泥浆对卸泥点产生很大的冲击力,不利于安全和环保。阶梯卸泥又称“缓冲卸泥”,卸泥自动控制可以将抓斗卸泥过程分为最多8个阶段,使泥块缓慢掉落。阶梯卸泥的自动控制模型如图5所示。开始卸泥时事先在系统中设定每个阶段的“阶梯开度”和“停顿时间”。系统根据设定值将抓斗开启至设定开度并停顿,依次完成各个阶梯。这样既达到了安全环保卸泥的目的,也避免了人为操作的复杂流程[4]。

图5 阶梯卸泥控制模型Fig.5 Ladder dumping control model
2.3 抓斗机旋回排斗
挖泥过程中我们都希望抓斗挖泥点可以均匀的成扇形排列,这就要求“旋回至下一次挖泥点”判断非常准确。抓斗从旋回到下放至泥面取泥经历2个影响抓斗实际挖泥点的过程:水上和水下。
水上过程:抓斗卸泥完毕后旋转至“理论状态下的下一次挖泥点”,此时因受到旋回惯性、船舶纵横倾和风力的影响,人为判断误差较大。
水下过程:抓斗到达“理论状态下的下一次挖泥点”后,开始下斗,当抓斗入水后由于受到水流、涌浪和下放深度的影响抓斗实际挖泥点与“理论状态下的下一次挖泥点”有很大误差。水上过程因时间长,肉眼可观察,人为调整挖泥点是可行的,但是水下过程所经历的时间很短,人为调整将很难实现。为此“自动旋回”自动控制技术可以很好解决这一难题。
自动旋回功能是指抓斗卸泥完毕后系统自动控制抓斗旋回至入水点,下放抓斗至泥面,整个过程自动调整旋回角度,控制挖泥点的精度。
自动旋回的自动控制模型如图6所示,系统共分为2个控制过程:水上旋回控制和水下旋回控制。每个控制过程都配有自动旋回模型,模型根据输入参数实时调整旋回角度,减少挖泥点的误差[5]。
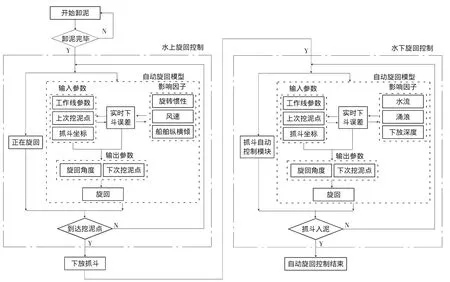
图6 自动旋回控制模型Fig.6 Automatic cycle control model
3 结语
根据抓斗挖泥船抓斗机挖泥原理将挖泥周期分为:挖泥、卸泥、抓斗机旋回排斗3个过程。在分析3个过程自动控制需求的基础上,重点研究了定深、深挖、平挖、碎礁、阶梯卸泥和自动排斗6项自动控制技术,并设计出对应的自动控制模型。自动控制技术的引入可以大大减少操作人员劳动强度,提高施工质量和施工效率。
[1] 肖汉斌,张永涛,路世青,等.疏浚抓斗平挖运动研究与仿真[J].武汉理工大学学报:交通科学与工程版,2013,37(3):482-485,490.XIAOHan-bin,ZHANG Yong-tao,LU Shi-qing,et al.Research and simulation on flat dredging kinematics of the dredging clamshell[J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(3):482-485,490.
[2] 陈国平.挖泥船作业过程监控系统的研究与开发[D].杭州:浙江大学,2004.CHENGuo-ping.Research and development of monitoring system in dredger′s dredging process[D].Hangzhou:Zhejiang University,2004.
[3]朱也夫.抓斗卸船机抓斗轨迹优化及控制策略的研究[D].大连:大连海事大学,2010.ZHUYe-fu.Optimization and control strategy of grab running path for grab ship unloader[D].Dalian:Dalian Maritime University,2010.
[4] 王鑫磊.抓斗桥式起重机动态特性研究[D].武汉:武汉科技大学,2012.WANG Xin-lei.Researching the dynamic characteristics of the grab bridge crane[D].Wuhan:Wuhan University of Science and Technology,2012.
[5]滕雪刚.港口起重机抓斗测试系统及控制策略研究[D].武汉:武汉理工大学,2012.TENG Xue-gang.Test system and control strategy of the grab of port crane[D].Wuhan:Wuhan Universityof Technology,2012.
