基于安全性建模的民机ILS信号设计
2024-03-27袁心悦
袁心悦, 陈 洪, 丁 璐,*, 宋 磊, 黄 丹
(1. 上海交通大学航空航天学院, 上海 200240; 2. 广西大学电气工程学院, 广西 南宁 530004; 3. 上海交通大学电子信息与电气工程学院, 上海 200240)
0 引 言
相关统计表明,最后进近着陆阶段是飞行事故率最高的阶段,在4%的飞行时间占比下,事故数量在该阶段所占的比重高达49.1%[1-3],民机最后进近着陆安全性的相关研究对于提升民用飞机的安全飞行而言具有重要意义。仪表着陆系统(instrument landing system, ILS)是一种飞机精密进近着陆无线电导航系统,在协助航空器安全完成最后进近着陆任务中发挥了重大作用[4-5]。ILS信号作为民机最后进近着陆过程中飞行员获取飞机状态的主要机载显示信号,引导着飞行员操作飞机,对民机进近着陆安全至关重要[6-7]。情景意识,是指飞行员在特定的时段里、特定的情境中,对影响飞机和机组的各种因素和各种条件的准确知觉,可以使飞行员更加准确地感知外界环境、更好地操控航空器,并使其保持在预定的航路上[8-11]。更加合理的ILS信号设计能够提高飞行员的情景意识,进而提高航空器运行安全的整体水平。
在最后进近着陆过程中,飞行员通过下滑台和航向台提供的ILS信号确定飞机与标称路径的相对位置,使飞机沿正确方向和高度飞向跑道[12-16]。但是在不同的相对位置下,由运行安全性在水平方向及垂直方向所限定的偏离要求是不同的,并且相对跑道位置越近,对偏离的要求越严格。ILS将实际情况下滑角与航向角和标称轨迹之间的角度偏移量做线性变换,并将其以均匀分布的刻度形式显示在主飞行显示器(primary flight display, PFD)中,以供飞行员修正飞机下滑轨迹[17-19]。在空客A320客机的PFD中,航向道刻度上的一个点代表0.8°的偏离,下滑道刻度上的一个点代表0.4°的偏离[20-21]。然而,实际的轨迹安全性与距标称点的距离有关,故随角度偏移呈非线性关系。目前,刻度呈均匀变化的ILS信号不能反映实际的安全性变化,飞行员缺乏对不同位置下仪表着陆信号安全性变化的视觉刺激。为了在特殊情况或飞机达到性能边缘时,飞行员也能够更快地意识到距离安全边界的偏差范围并及时做出修正,需要对最后进近着陆过程的动态轨迹安全范围进行研究,并将其作为飞行员辅助决策判断的依据进行可视化。
将最后进近着陆过程的动态安全性量化为信号刻度偏移并进行可视化显示,能给飞行员提供更加明确的决策参考。在具备更充分的机动操作条件时,显示修正轨迹的余度,提高飞行员在不同位置下对仪表着陆信号的安全范围感知度,有利于保证进近着陆过程的轨迹精确性和运行安全的稳定性,使飞行员在观察轨迹偏移角度信号的同时,还能够感知到进近着陆过程中的即时安全性变化,并通过所获得的实时信息对飞行状态进行预测,对提升进近着陆阶段的安全性而言有重要的研究意义与价值。
目前,针对飞机进近着陆阶段安全性量化方法的研究主要集中于概率模型构建和层次分析方法,部分学者从这些角度展开了较多的研究工作。Thiel等[22]基于精密进近航段截面航迹偏差概率密度函数建立了机场安全性评估模型。李娜等[23]基于统计建模方法建立了碰撞风险模型,结果表明进近着陆过程的航迹偏差呈椭圆状分布。陈农田等[24]基于层次任务分析(hierarchical task analysis, HTA)方法对进近着陆阶段的操纵任务展开分析,为实施飞行员进近着陆操纵行为风险分析奠定了基础。王晴昊等[25]基于系统理论过程分析(system theoretic process analysis, STPA)方法对民用客机进近着陆阶段的高度、速度、下滑角等不安全控制行为(unsafe control actions, UCA)进行了详细的安全性分析。鲁志东等[26]使用随机模拟和相关性分析方法,建立典型大型民机飞行数值仿真平台,研究能量状态参数偏离导致进近着陆风险的影响规律,给出了由关键能量参数确定的能量状态安全边界,为大型民机进近着陆过程的风险预警提供了方法基础。安全性可视化方法主要集中于平视显示器(head up display, HUD)、增强视景系统(enhanced vision system, EVS)等新兴技术,HUD技术[27-30]使飞行员在保持平视的情况下获取飞机姿态、高度等信息;EVS技术[31-34]能将飞机外景实时图像叠加在显示器上,以增强飞行员的情景意识。然而,概率模型构建和层次分析方法偏理论层面,如果能够将其与进近着陆阶段的运行安全性结合起来,将更符合实际需求、普适性更强。而HUD、EVS安全性可视化仅仅将实际飞行状态与实景信息进行了显示,缺乏与进近着陆安全性的联系。
针对以上现存问题,本文提出基于高斯量化安全性的ILS信号设计方法,该方法考虑了安全性随仪表刻度偏移的变化率,在进行仪表着陆时,通过信号显示对安全性随角度偏移的变化率进行了补偿,显示修正轨迹的裕度,以供飞行员做辅助决策,有利于保证进近着陆过程的轨迹精确性和运行的安全稳定性。
1 最后进近过程量化安全性建模
1.1 最后进近过程安全范围分析
在跑道坐标系OXYZ下建立如图1所示的民机最后进近着陆模型。以跑道入口中心点为原点O,以跑道中心线及其延长线为X轴,入口外为正,入口内为负。在跑道平面内Y轴垂直于X轴,按照进近方向看,左侧为负,右侧为正。Z轴垂直XOY面向上。飞机坐标为QS(XS,YS,ZS),下滑台坐标为QB(XB,YB,0),航向台坐标为QC(XC,0,0)。文中x、y、z和XS、YS、ZS(s表示进近着陆过程中的任意点)均表示该点在X轴、Y轴、Z轴上的投影。下滑角γ是指下滑面与水平面在垂直平面内的夹角,γR为标称下滑角。航向角φ是指航向面与垂直平面在水平面内的夹角,φR为标称航向角。

图1 民机最后进近着陆模型Fig.1 Civil aircraft’s final approach and landing model
如图2所示,在飞机的最后进近着陆过程中,安全飞行范围可以近似为一个以标称轨迹为中心的锥体。从垂直方向截这个锥体,剖面是一个椭圆,其中椭圆的长短半径分别代表了在这个位置下,飞机在运行安全限制下的下滑道和航向道方向上的可偏移范围。定义μi和μj为椭圆的中心,σi和σj用来描述椭圆长短半径。下标i和j分别表示下滑道、航向道方向,后文统一。距跑道着陆点距离不同,椭圆的面积随之变化,因此σi和σj是关于距跑道入口距离x的函数。显然,当飞机位于轨迹中心时安全性最大,偏离中心角度越大,飞机的安全性越小,安全性关于中心呈对称分布形式,使用高斯函数来描述进近着陆过程中关于角度偏移的安全性恰好能表达此性质。

图2 最后进近着陆阶段横向运动几何图Fig.2 Geometry diagram of lateral motion in the final approach and landing phase
记I和J分别为下滑道和航向道方向上的安全性定量表示,定义高斯安全性函数:
(1)
(2)
当飞机位于标称轨迹点下时安全性最大,因此分别定义μi和μj为标称下滑角和标称航向角。距离跑道越近,相同角度偏移变化对应的安全性变化越大,将高斯安全性函数的标准差定义为实际偏离中心的距离。定义σi为椭圆的上下顶点{Q1(x),Q2(x)}在Z轴上的投影之差,用来确定下滑道方向的安全距离范围。σj为椭圆左右顶点{Q3(x),Q4(x)}在Y轴上的投影之差,用来确定航向道方向上的安全距离范围。离跑道越近,对应的可偏移距离范围越小,安全性变化程度越大,因此用偏离中心的距离定义高斯安全性函数的标准差,符合进近着陆安全性函数的性质。
为描述I(x,z)和J(x,y)安全性函数,需要逆向求解得出标称轨迹点集合QR(x)与椭圆边界点集合{Q1(x),Q2(x),Q3(x),Q4(x)},进而计算得出μi、μj、σi、σj。
1.2 最后进近过程逆向求解


图3 最后进近着陆阶段纵向运动几何图Fig.3 Geometry diagram of longitudinal motion in the final approach and landing phase
QR(x,y,z)=QC(XS,0,(XS-XB)tanγR)
(3)
椭圆剖面上下边界点坐标为
(4)
(5)
同理,可根据最后进近阶段横向运动几何图(见图2)求解得出椭圆左右边界点坐标Q3(x,y,z)和Q4(x,y,z)。接下来,将计算得出以椭圆中心及边界点坐标为自变量的μi、μj、σi、σj,进而求解高斯量化安全性函数I(x,z)和J(x,y)。
1.3 进近着陆安全性定量描述方法
根据最后进近阶段纵向和横向的安全边界范围,可以推导得出进近着陆过程中的下滑道和航向道方向上的安全性函数I和J分别为
(6)
(7)
其中,
(8)
(9)
进近着陆过程中的下滑道和航向道方向上的安全性定量表示函数I和J所有参数均求解完成,下面将详细介绍基于高斯安全性函数的ILS安全性信号设计。
2 ILS安全性信号设计方法研究
为建立信号设计与安全性之间的关系,首先对安全性信号显示与安全性变化进行相关性分析。以下滑道偏差信号为例,定义实际轨迹偏离标称轨迹的角度为下滑角γ,将下滑角的变化记为dγ;下滑道偏差信号刻度函数为li,记li=li(γ),其变化为dli;该下滑角对应的安全性函数记为si,si=I(γ),其变化为dsi。下滑道方向上的安全性信号的设计的本质是通过dli/dγ来反映dsi/dγ。下滑道偏差信号的刻度呈均匀变化,即dli/dγ为常数。而实际上,下滑道方向上的安全性si关于下滑角γ呈非线性变化,即dsi/dγ非常数。因此,dli/dγ和dsi/dγ变化的趋势不一致,即刻度均匀变化的下滑角偏差信号不能反映实际的下滑道安全性随角度偏移的变化程度。为了能够从提高飞行员情景意识的角度进行信号设计,进而提高最后进近阶段的安全性,需要使下滑道偏差信号的刻度变化率与下滑道方向上的安全性变化率保持一致,才能让飞行员通过观察下滑道偏差信号的刻度偏移感知实际的安全性变化程度。
2.1 下滑道及航向道安全性信号变化率分析
第2节对最后进近阶段中不同位置下的安全性进行了定性分析及定量描述,得出下滑道方向上的安全性函数si=I(x,γ)与距跑道入口距离x、下滑角γ均有关。为了求出不同位置下的下滑道安全性函数的变化率,本文先固定距跑道入口距离x,以进行相关分析,后文将对不同跑道入口距离x下的下滑道安全性信号设计方法进行讨论。
为求解不同下滑角对应的安全性变化,参考式(6),对下滑道安全性函数I(x,γ)关于γ求偏导:
(10)
为分析不同下滑角下安全性变化率趋势,对下滑道安全性函数I(x,γ)关于γ求二阶偏导,记为m(x):
(11)
因此,下滑道安全性函数I(x,γ)的拐点,即下滑道安全性函数I(x,γ)关于γ的二阶偏导函数m(x)的零点为
γ=γR±σi(x)
(12)
由此可知,∂I(x,γ)/∂γ,即安全性的变化率,在[μi-σi,μi+σi]内单调递减。第1.1节将运行安全距离范围定义为高斯函数的标准差σi,因此本文讨论的运行安全情况下的安全性函数的定义域为[μi-σi,μi+σi]。在定义域内,安全性的变化率绝对值|∂I(x,γ)/∂γ|先减后增,可定义以下形式的下滑道信号变化率函数fi(γ):
fi(γ)=ax·exp|γ-γR|
(13)
其中,系数ax>0,与距跑道入口距离x有关,将在后文中进行详细介绍。下滑道信号变化率函数应和安全性变化率函数的趋势保持一致,fi(γ)先减后增,拐点为γ=γR,与安全性变化率函数dsi/dγ性质一致。因此,将下滑道安全性信号变化率函数fi(γ)设置为式(13)的形式,能够使下滑道安全性信号的刻度变化与实际下滑道方向上的安全性变化的趋势保持一致。
与下滑道安全性信号变化率函数求解的思路一致,可定义航向道安全性信号变化率函数fj(φ):
fj(φ)=bx·exp|φ-φR|
(14)
式中:系数bx>0,是关于距跑道入口距离x的函数。
2.2 ILS安全性信号设计
第2.1节研究了距跑道入口距离x不变时,航向道和下滑道方向上的ILS安全性信号函数形式。实际上,在相同角度偏移变化ε下,距离跑道越近,对应的安全性变化程度越小,ILS安全性信号设计应体现出这一性质。
根据相应性质,定义下滑道和航向道方向上的安全性信号变化率函数fi(x,γ)和fj(x,φ)为
fi(x,γ)=ki·x·exp|γ-γR|
(15)
fj(x,φ)=kj·x·exp|φ-φR|
(16)
式中:ki,kj分别为下滑道和航向道刻度相关系数,均与具体情况中飞行主显示器PFD的显示尺寸有关。
本节设计的下滑道和航向道方向上的安全性信号,在保留原先ILS信号对下滑角度偏差信息和航向角度偏差信息的显示的基础上,通过不同的刻度变化率设置,将不同时刻的下滑道方向和航向道方向上的安全性信息体现出来,以辅助飞行员做出决策判断。
如图4所示,下滑道方向上的安全性信号显示在飞行主显示器PFD右侧,航向道方向上的安全性信号显示在PFD下方。每个刻度表示同等变化的下滑角Δγ和航向角Δφ,刻度变化率表示下滑道和航向道方向上的安全性的变化趋势,中间较长的刻度代表标称下滑角和标称航向角,图4仅画出了5条刻度,以示意刻度与变化率之间的关系。以下滑道安全性信号为例,下滑角越大、单位下滑角偏移对应的刻度变化率越大,这与下滑角越大、单位下滑角偏移对应的最后进近过程飞机的安全性变化程度越大的性质相一致。

图4 ILS安全性信号设计图Fig.4 Design diagram of ILS signal for safety
ILS安全性信号将实际安全性的变化趋势体现在视觉上的刻度变化上,使飞行员能够在观察下滑角和航向角偏差信息的同时,感知到实际安全性的大小,进而调整飞行操作。ILS安全性信号拟从提高飞行员的情景意识的角度,提高进近着陆过程的安全性。
3 民机ILS安全性信号验证
为验证加入本文设计的ILS安全性信号后对于进近着陆过程的安全性的影响,本文首先建立了面向ILS安全性信号的飞行员认知模型,产生飞机操纵状态信号,与飞控系统共同对飞机姿态进行调整,进行民机最后进近着陆场景仿真实验。同时,建立了面向安全性的适航评价标准,对民机最后进近着陆场景进行安全性评估与分析,实验设计框图如图5所示。

图5 民机最后进近着陆仿真实验设计框图Fig.5 Block diagram of simulation experiment design during final approach and landing for civil aircraft
3.1 飞行员认知系统建模
将飞行员认知过程分解为感知与决策控制两个过程,如图6所示。将信号作为飞行员认知过程的视觉输入,对飞行员视觉感知与决策过程进行建模,输出控制信号流对飞机姿态进行调整。基于第2节设计的基于高斯量化的ILS安全性信号,本节对进近着陆过程中的飞行员认知过程进行建模,为后文进近着陆安全性分析提供模型仿真基础。

图6 飞行员认知模型Fig.6 Pilot cognitive model
3.1.1 飞行员感知模块设计
飞行员的感知过程是指飞行员对外界信息的注意、觉察、感觉、知觉等的一系列过程[35]。在飞行员对飞行参数相关信息的感知过程中,会产生反应时间(reaction-time, RT)和观测误差(observation-error, OE)两个主要影响因素。其中,RT是指飞行员对于感知到的信息产生反应所需的时间,OE是指由仪表校验误差导致飞行员在观测时产生的误差[36]。PFD作为数字航空电子设备,飞行员对其的OE影响值很小,因此本文主要探究飞行员对于现阶段显示在飞行主显示器PFD中的ILS信号与本文研究的ILS安全性信号的RT的影响。
本文使用串行自终止搜索(serial self-terminating search, SSTS)模型[37]对飞行员对仪表的RT进行建模。在此模型中,定义变量τRT为飞行员在感知阶段获取信息的RT。飞行员搜索n个仪表的RT值τRT与n成正比:
(17)
式中:ap为信息反应过程中的固有时间;bm为单个仪表信号的RT。由于不同仪表信号的尺寸、面积大小等影响飞行员感知的因素往往不同,因此bi会随着仪器的不同而变化。基于SSTS模型,分别对目前的ILS信号和本文设计的ILS安全性信号进行建模。
(1) 飞行员对目前的ILS信号的感知模型
目前的ILS信号为下滑角度偏差信号和航向角度偏差信号,因此在式(17)中取n=2。在真实飞机设计中,下滑角度偏差信号与航向角度偏差信号在飞行主显示器PFD中显示的尺寸和面积大小相同,飞行员对这两个信号的RT相同,令b1=b2=b0。因此,飞行员关于ILS信号的RT基础表达式为
τRT=ap+2b0
(18)
目前的ILS信号仅体现出了飞机在下滑道方向上和航向道方向上距离真实轨迹距离标称轨迹的偏差信息,从而进行决策控制,操纵飞机对其轨迹进行修正。可以将其抽象为视觉感知刻度变化引起飞行员的情景意识。刻度变化越大,引起情景意识所需的时间就越少,因此延迟时间与刻度变化成反比,即可令b0=1/k0。对于目前的ILS信号,单个仪表信号的b0与下滑角度偏差信号的变化率函数fi0以及航向角度偏差信号的变化率函数fj0的关系为
(19)
由于飞行员关于目前的ILS信号中下滑角度偏差信号和航向角度偏差信号的RT值b1=b2=b0,基于式(19),得出飞行员对于目前飞行主显示器PFD中的下滑角度偏差信号的感知时延τRT_i0和航向角度偏差信号的感知时延τRT_j0为
(20)
飞行员的实时感知ILS角度关于目前的飞行主显示器PFD输出的实际ILS角度的传递函数为
G0(s)=e-τRTi0·s=e-τRTj0·s
(21)
(2) 飞行员对ILS安全性信号的感知模型
本文设计的ILS安全性信号,通过与下滑道、航向道方向上的安全性变化率趋势一致的刻度变化率设置方法,在保留原先ILS信号对下滑角度偏差信息和航向角度偏差信息显示的基础上,将不同时刻的下滑道方向和航向道方向的安全性信息体现出来,使飞行员能够通过观察下滑角度和航向角度偏差信号的刻度偏移感知到相应方向上的实际安全性的变化程度。
基于计算得出的下滑道安全性信号的RT函数表达式,将SSTS算法修改为适应下滑道安全性信号的感知模型:
(22)
同理,将飞行员对航向道安全性信号的SSTS感知模型修正为
(23)
选取上海浦东机场34 L跑道为例进行演算,进行具体ILS安全性信号设计。查阅CAAC发布的相关资料,将34 L跑道的具体参数代入,得出航向道和下滑道安全性信号变化率模型fi(x,γ)与fj(x,φ)。
根据改进SSTS飞行员感知模型,可以写出飞行员的实时感知下滑角γper关于飞行主显示器PFD输出的实际下滑角γ的传递函数Gi(s)以及飞行员实时感知航向角φper关于实际航向角φ的传递函数Gj(s),具体形式为
Gi(s)=e-τRTi·s
(24)
Gj(s)=e-τRTj·s
(25)
3.1.2 飞行员决策控制过程建模
以升降舵偏角δe为例,进行飞行员决策控制模块相关分析。飞行员根据实时感知下滑角γper与期望下滑角γc,对升降舵进行控制:
(26)

实际的升降舵输出会受到飞行员神经肌肉动态系统的影响,根据已有的研究[38],人的肌肉动作在控制系统中可以用简单的一阶惯性环节进行模拟:
(27)
式中:τ为时间常数,反映飞行员通过肌肉动作执行所需要的固定时间长度。
3.2 民机最后进近着陆场景仿真实验
基于前文搭建的民机进近着陆场景,本文进行相应的数字化构造性仿真实验。在仿真过程中,初始设置飞机已完成五边进近,对从最后进近航段至完成着陆的最后进近着陆过程进行仿真实验。为探究加入ILS安全性信号的改进仪表设计对进近着陆安全性的影响,本文将进近着陆仿真设置为4组对照实验。根据是否在可视化仪表中加入ILS安全性信号以及最后进近阶段最后进近点(final approach fix, FAF)的ILS角度偏差的不同设置,探究在最后进近着陆阶段中,ILS安全性信号对飞行安全的影响。4组对照实验的设置方法如表1所示。
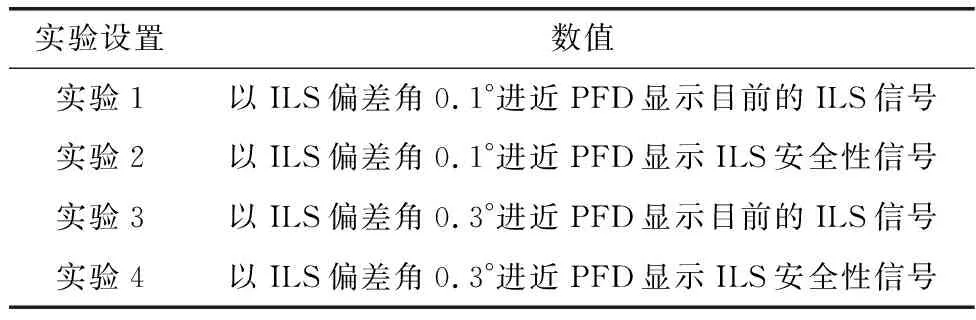
表1 对照实验设置Table 1 Control experiment setting
3.3 实验结果与分析
每组进近着陆仿真实验分别进行500次,对进近着陆实验相关航迹信息进行记录。从每组实验中选取500次飞行轨迹曲线的中线, 并绘制所选取中线的三维轨迹图,如图7所示。其中,OXYZ为以跑道入口中心点为原点O的跑道坐标系。

图7 飞行轨迹中线三维视图Fig.7 Three-dimensional view of the flight trajectory’s midline
为对2 000次民机进近着陆实验中的着陆点安全性进行分析,首先要对相关适航条款建立面向安全性的符合性评价标准。进近着陆阶段的适航标准主要参考欧洲航空安全局(European Aviation Safety Agency, EASA)发布的全天候运营的认证规范(certification specifications for all weather operations,CS-AWO)中的相关规定,通过梳理得到的相关要求如表2所示。

表2 CS-AWO规定的着陆阶段限制要求Table 2 Landing stage limitation requirements specified by CS-AWO
结合上海浦东机场34 L跑道相关参数与表2梳理得到的适航标准,飞机在进近着陆过程中,最终着陆接地位置需落在如图8所示的指定区域范围内。以跑道入口为原点,沿跑道中心线方向的可着陆区域为[60 m,823 m],垂直于跑道中心线的可着陆区域为[-21 m,21 m]。

图8 上海浦东机场34 L跑道着陆接地点区域图Fig.8 Area map of landing touchdown points for runway 34L at Shanghai Pudong Airport
在跑道坐标系的XOY面中,定义飞机着陆点的坐标为(xa,ya),可将着陆区域划分如下:
(1) 将xa∈[-823,-60],ya∈[-21,21]的区域定义为Ⅰ级安全区域,为相对最安全的着陆区域;
(2) 将xa∈[-3 800,0],ya∈[-60,60]范围内的非Ⅰ级安全区域定义为Ⅱ级安全区域,该区域包含跑道范围内的偏离、提前着陆以及滞后着陆,对应飞行员操作为人为紧急着陆或复飞;
(3) 将XOY面中非Ⅰ/Ⅱ级安全区域定义为不安全区域,为飞机异常着陆事故发生区域。
根据2 000次仿真对照实验,统计其在以上3个区域的概率分布情况,相关数据如表3所示。从表3中的数据可以看出,在以较小ILS偏角进近着陆过程中,在可视化仪表中加入ILS安全性信号相比目前刻度均匀变化的ILS信号,着陆点落在Ⅰ级安全区域的概率从85.98%提升到了89.27%,落在发生飞行事故的不安全区域的概率从2.75%降为1.82%;将Ⅰ级和Ⅱ级安全区域统称为安全区域,则ILS安全性信号在以较小ILS偏角进近中将安全着陆的概率从97.25%提高到了98.18%。

表3 着陆点概率分布Table 3 Probability distribution of landing points %
在以较大ILS偏角进近着陆中,相比目前刻度均匀变化的ILS信号,在可视化仪表中加入ILS安全性信号,使着陆点落在Ⅰ级安全区域的概率从70.32%提升到了77.25%,着陆点落在不安全区域的概率从11.04%降为8.23%;ILS安全性信号在以较大ILS偏角进近着陆中将安全着陆的概率从88.96%提高到了91.77%。
因此,无论以大小偏角进近,在可视化仪表中加入ILS安全性信号均提高了安全着陆的概率,尤其在进近偏角大的情况下,安全性提升效果更加明显。由此可见,在进近着陆过程中,将安全性可视化为ILS安全性信号,能通过提升飞行员对真实安全范围的情景意识,进而提高安全着陆的概率。
4 结束语
针对均匀分布的仪表着陆信号无法反映真实安全性变化的问题,本文提出一种基于高斯量化的ILS安全性的信号设计方法,研究了基于高斯量化的民机最终进近过程的安全性模型,并利用逆向求解方法确定安全范围。基于该模型设计了ILS安全信号模型,实现了动态安全性量化显示。最后,搭建了面向ILS安全性仪表设计系统的飞行员认知模型,并结合民机系统模型进行了数字化结构性仿真实验。仿真结果表明,本文设计的ILS 安全性信号有助于提升进近着陆阶段的安全性。后续研究工作将考虑结合模拟器进行仿真实验,验证该安全性信号设计方法与飞行员真实的响应效果之间的关系。
