城市轨道交通兼容性车载系统阶梯形目标速度的平滑跟踪控制研究
2024-03-27顾立忠吕新军王维旸
顾立忠 吕新军 王维旸
(卡斯柯信号有限公司, 200072, 上海)
为应对日益增长的运营客流压力,一些建设较早的城市轨道交通(以下简称“城轨”)线路迫切需要技术升级。如上海轨道交通2号线(以下简称“2号线”)全线分段开通,时间跨度较大,其中:首通段已经到了大修年限,需大修升级成CBTC(基于通信的列车控制)信号系统;而其他段尚未达到大修年限,原有轨道电路还需保留使用。为了不影响日常运营,能够平稳地从原有的TBTC(基于轨道电路的列车控制)信号系统逐步过渡到CBTC信号系统,车载需要同时兼容TBTC和CBTC两种制式的信号系统[1]。
在兼容性车载系统中,由原有的TBTC车载系统的预处理单元设备DTG(目标距离)系统接收既有音频轨道电路信号,生成目标速度曲线,新增加的设备CC(车载控制器)接收DTG系统的目标速度命令,控制列车运行。此处涉及到DTG系统的计算周期、CC的控制周期及两个设备之间的消息接口周期等3种周期。从车载控制器的角度观察,其在列车减速过程中收到的是阶梯形目标速度命令序列。考虑到DTG-CC接口消息周期长以及列车响应延时等因素,CC如果直接使用接收到的目标速度命令进行控车,必将会带来制动命令饱和、速度曲线凹坑等问题。
在满足安全的前提下,ATO(列车自动运行)系统需要综合考虑各项性能指标,实现列车的平稳驾驶、准确停靠、准点到达及节能运行等目标[2]。ATO系统的可靠性、高效性对城轨线路运营能力有非常大的影响。目前ATO的研究领域主要有列车运行建模技术、列车轨迹优化及列车速度控制方法[3]等3个方面,尚无针对兼容性车载系统阶梯形目标速度曲线的平滑跟踪控制方法。
本文提出了一种双周期速度跟踪算法,以实现兼容性车载系统的平稳驾驶。该算法解决了控制命令饱和以及由于目标速度命令滞后和列车响应延时引起的速度曲线凹坑等问题。
1 城市轨道交通兼容性车载系统
1.1 功能接口描述
2号线兼容性车载系统兼具CBTC和TBTC功能,由DTG系统从轨道电路和环线处理模块接收轨旁信息,获知轨道电路ID(身份标志)、方向、目标速度和目标点距离等信息,经过安全运算处理,生成目标速度命令,发送给CC[4]。CC负责控制列车,根据接收到的目标速度命令,生成列车控制命令。DTG系统与CC之间的消息间隔时间是不固定的,每隔600~900 ms,DTG系统会给CC发送目标速度命令。CC控制周期为100 ms,远小于DTG系统与CC的接口消息周期,在未收到目标速度命令时刻,为了控车的舒适和平稳,需要计算合适的列车控制命令。
1.2 跟踪控制难点
兼容性车载系统目标速度-距离关系曲线如图1所示。图1中,列车运行区间包含了站台发车、区间巡航、站前减速及站台停车等4个过程。列车进入站台区域后目标速度仅表示站台限速,CC根据编码里程计和欧式信标信息执行精确停站程序。在站台发车和区间巡航过程中目标速度都是恒定的,CC不需要对目标速度进行特殊处理,只要遵循一个恒定的目标速度控车即可。需要重点关注的是列车站前减速过程,即列车从区间高限速巡航区域进入到低限速巡航区域的减速过程。
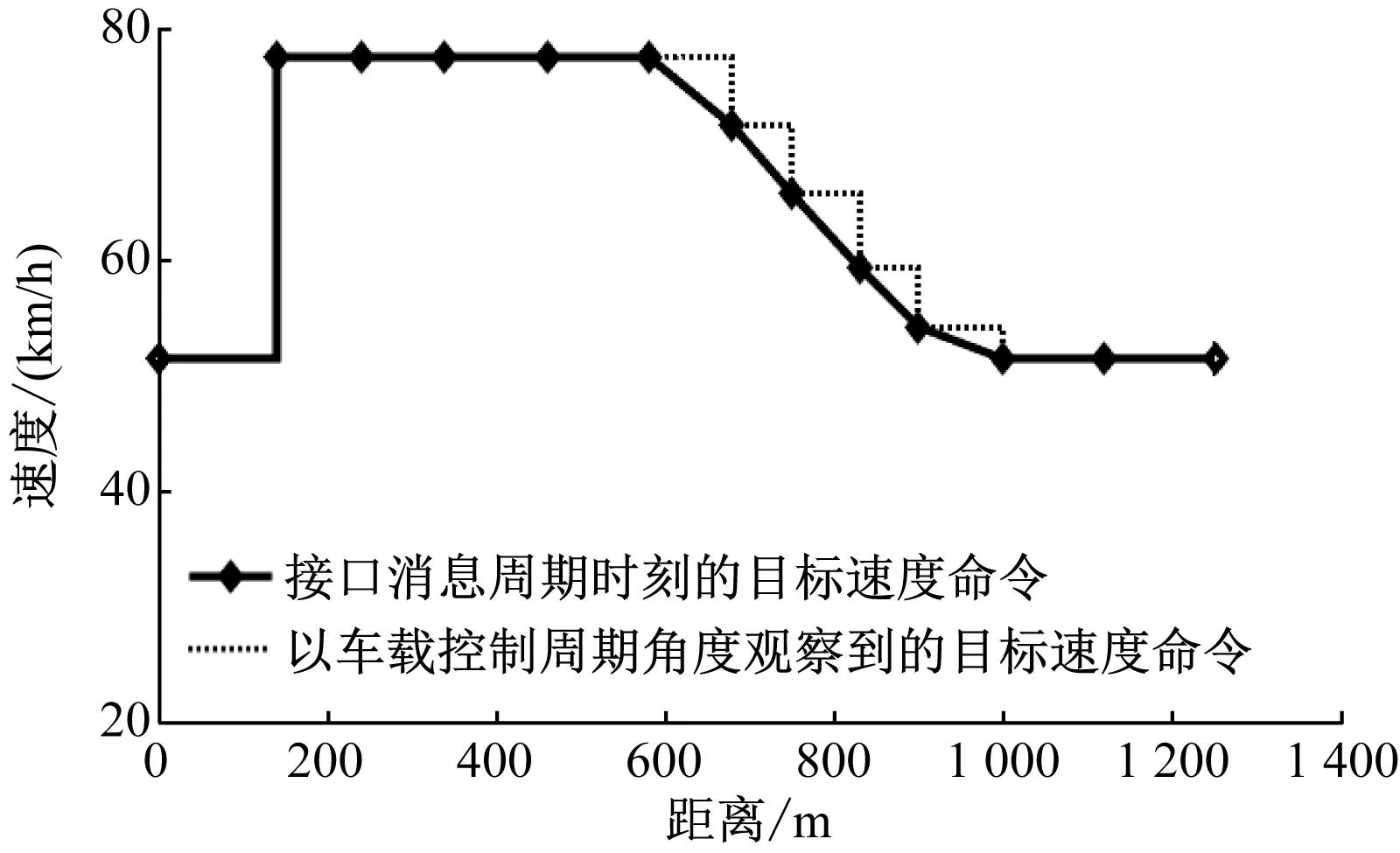
图1 兼容性车载系统目标速度-距离关系曲线示意图
兼容性车载ATO跟踪控制的难点在于DTG系统消息周期与车载CC控制周期的不匹配。从车载CC控制周期的角度观察,其目标速度命令序列类似1条阶梯形的目标速度曲线。此命令序列有两个特点:第一,间隔不固定;第二,间隔周期长,远大于车载CC控制周期。若CC直接使用目标速度命令进行ATO控车,则由于DTG-CC消息滞后以及列车响应延时的特性,将会出现初始制动大、控制命令饱和、波动大及速度曲线凹坑等现象。控制命令饱和后制动输出将被限值为-1 m/s2,若不进行限值约束,则减速过程中将会频繁地出现制动、惰行工况切换,列车速度曲线也将类似1个阶梯形状。另外,速度曲线凹坑现象也是由于CC不能及时获得目标速度消息所致。
上述现象都将严重影响乘客舒适度,增大列车制动损耗及牵引能耗。为了实现阶梯形目标速度曲线的平滑跟踪控制,需对收到的目标速度命令进行适当处理。
2 兼容性车载系统阶梯形目标速度的平滑跟踪控制算法设计
图2为兼容性车载系统阶梯形目标速度曲线的双周期速度平滑跟踪控制算法流程图。由于目标速度消息周期远大于车载控制周期,因此需对这两个大小周期分别进行处理。在收到目标速度消息的大周期时刻,CC需根据目标速度的变化趋势,判断列车的控车状态,同时需计算参考速度和参考加速度的估计值;在未收到目标速度消息的小周期时刻,计算控车参考速度。采取拟平行参考速度跟踪控制策略计算控车命令。
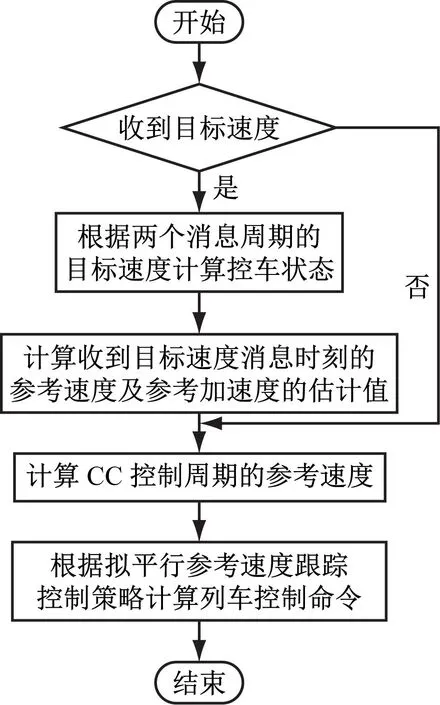
图2 兼容性车载系统阶梯形目标速度曲线的双周期速度平滑跟踪控制算法流程图
2.1 控车状态计算
根据目标速度序列特点,引入了巡航状态和估计状态等2个控车状态。其中:巡航状态用于恒速阶段,此时CC的参考加速度设置为0;估计状态用于高限速区域进入到低限速区域的减速过程,使用卡尔曼滤波算法估计参考速度及参考加速度,其中参考加速度小于0。
从巡航状态进入到估计状态的条件为:CC接收到的目标速度命令小于上个消息周期的数值。维持巡航状态的条件为:CC接收到的目标速度大于等于上个消息周期的数值。
当CC控车状态处于估计状态时,若接收到的目标速度命令小于上个消息周期的数值,则维持估计状态。若CC接收到的目标速度命令大于等于上个消息周期的数值,则进入巡航状态。
2.2 参考速度及加速度计算
2.2.1 DTG系统消息周期的参考加速度估计值
列车在站前减速过程中,CC接收到递减的目标速度命令序列。为了平缓消息间隔不固定的目标速度命令,使用卡尔曼滤波算法计算参考速度与参考加速度的估计值。卡尔曼滤波算法是一种最优自回归估计算法[5],其通过参数的适当配置,可以估计出比较平缓的参考速度与参考加速度。需注意,使用卡尔曼滤波算法主要是为了能够获得DTG系统消息周期内平缓的参考加速度估计值,基于参考加速度估计值可计算车载控制小周期时刻的控车参考速度。
为了使用卡尔曼滤波算法估计参考速度与参考加速度,建立动态过程模型与测量过程模型。动态过程模型为:
xk=Axk-1+wk
(1)
式中:
xk——状态向量(k为收到目标速度的消息时刻),xk=[vkak]T,其中vk表示参考速度估计值,ak为参考加速度估计值;

wk——过程噪声向量,wk=[ω1ω2]T,其中ω1表示参考速度噪声,ω2表示参考加速度噪声估计值。
测量过程模型为;
zk=Hxk+uk
(2)
式中:
zk——在DTG-CC接口消息时刻收到的目标速度命令;
H——测量矩阵,H=[1 0];
uk——测量噪声。
基于卡尔曼滤波算法的估计过程为:
(3)
式中:
P——状态向量的误差协方差矩阵;
Q——过程噪声协方差矩阵;
R——测量噪声方差;
K——卡尔曼增益;
通过式(3)的计算,可以从含有噪声、间隔不固定的目标速度命令中获得相对平缓的vk与ak。
2.2.2 CC车载控制周期的参考速度
在未收到目标速度的车载控制周期时刻,需根据前述计算的vk与ak,计算ATO控车使用的参考速度:
vn,ref=vn-1,ref+an,refTATO
an,ref=an-1,ref
(4)
式中:
vn,ref——车载控制周期时刻n的控车参考速度,其初始值即DTG-CC接口消息时刻的vk;
an,ref——车载控制周期时刻n的控车参考加速度,在两次目标速度命令的间隔周期内保持恒定,其初始值即DTG-CC接口消息时刻的ak;
TATO——车载控制周期。
2.3 拟平行参考速度跟踪控制策略
在列车站前减速的初始阶段,由于DTG-CC接口消息周期相对较长,当CC根据目标速度序列判断出需要制动减速时,列车速度与目标速度之间已经有较大偏差。输出制动命令后需要再经过一段响应延时,列车速度才开始下降。如果要让列车速度曲线贴近目标速度曲线,则必然要施加非常大的初始制动,严重影响乘客舒适度。需注意,DTG系统在减速区域的常用制动触发速度计算过程中已经考虑了列车延时和消息滞后等因素,目标速度和常用制动触发速度之间已预留满足实际运营需求的速度裕量,只要列车速度不超过DTG系统常用制动触发速度,DTG系统则不会施加常用制动。本文设计了拟平行参考速度跟踪控制策略,不需使列车速度曲线非常贴近目标速度,而是允许列车速度适当高于目标速度,沿着平行于CC控车参考速度的虚拟曲线进行减速,这样既可以保证乘客的舒适度,同时也不会触发DTG系统的常用制动。列车控制命令计算方法为:
dn,cm=kv(vn,ref-vn)+ka(0-an)
(5)
式中:
kv——速度控制增益系数;
ka——加速度控制增益系数;
vn——车载控制周期时刻的列车速度;
an——车载控制周期时刻的列车加速度;
dn,cm——车载控制周期时刻的列车控制命令。
需注意,在计算列车控制命令时,控车参考加速度设为0,目的是为了使列车速度曲线平行于控车参考速度曲线。
另外,列车减速进入稳态后,列车速度与参考速度之间的偏差近似地由速度、加速度增益系数决定,稳态时列车控制命令和列车加速度近似为控车参考加速度。将控车参考加速度代入式(5),经过变换得:
vn,ref-vn=(1+ka)an,ref/kv
(6)
式(6)说明可以通过调整速度、加速度增益系数进而调整列车速度与参考速度之间的稳态偏差,即这两个增益系数决定了列车刚进入低限速区域时刻的速度差值。
需特别指出,本文采取的拟平行参考速度跟踪控制策略除了能够避免减速初始阶段的大制动现象,还为避免减速过程结束阶段出现的速度曲线凹坑现象提供了必要的先决条件。兼容性车载系统拟平行参考速度跟踪曲线如图3所示。图3中,列车速度沿着高于且近似平行于CC参考速度的虚拟曲线进行减速,当列车速度进入目标速度命令设定的平缓速度阈值范围内,说明此时可以提前退出估计状态,不需要连续两次收到相同的目标速度后才进入巡航状态,从而避免了速度曲线凹坑现象。
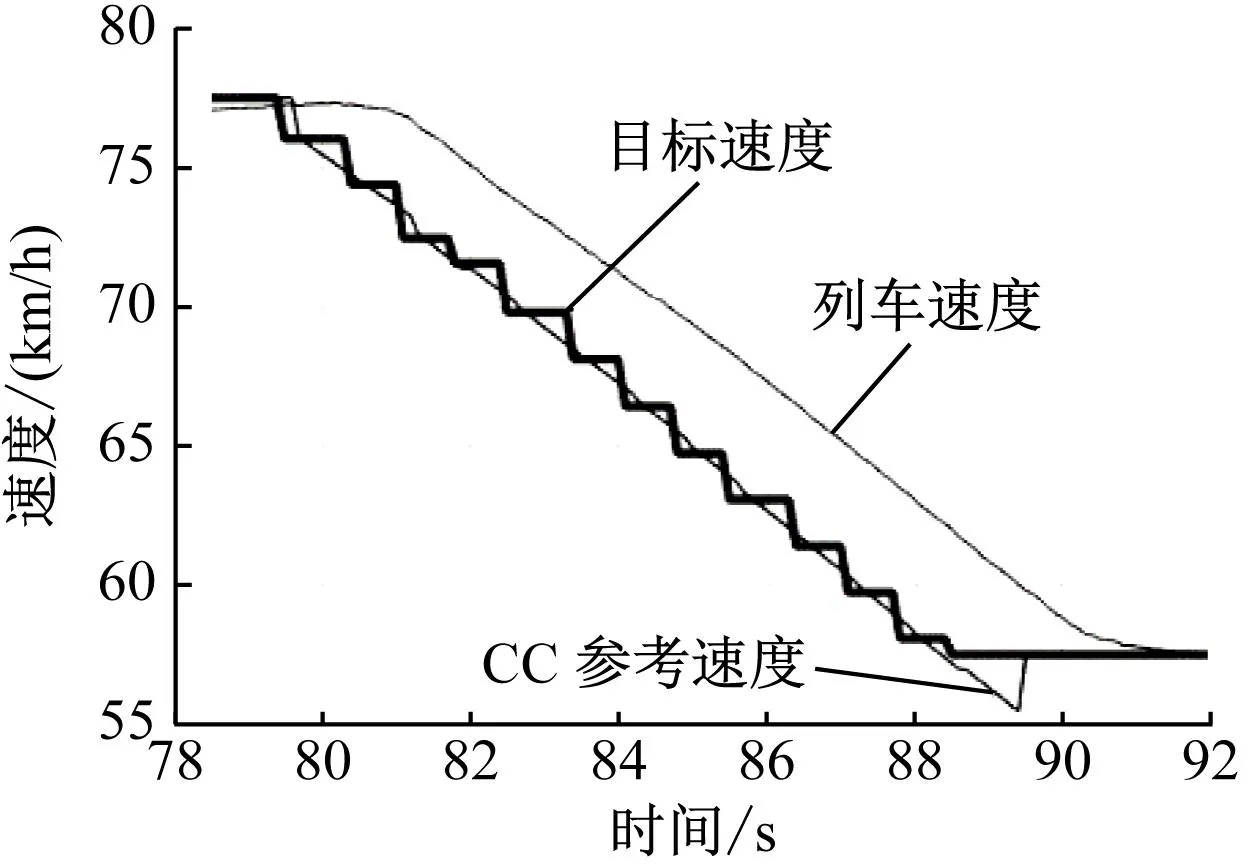
图3 兼容性车载系统拟平行参考速度跟踪曲线示意图
3 ATO仿真分析
3.1 ak估计效果对比
图4展示了直接计算法与卡尔曼滤波算法下的vk和ak对比。直接计算法通过目标速度变化值除以消息间隔时间得到ak。由于目标速度消息周期间隔不固定及噪声等因素的影响,减速过程中CC接收到的目标速度不是均匀递减。直接计算法得到的参考加速度含有较大的噪声且波动很大,将会对后续车载控制周期内的参考速度计算造成较大的干扰。通过卡尔曼滤波算法可以获得比较平缓的ak,同时还可以获得更加平缓的vk。

图4 两种算法下的vk和ak对比示意图
3.2 两种控制策略下控车效果对比
通过仿真对比分析了直接控制策略与双周期速度跟踪算法的控车效果。直接控制策略下车载控制器可不加处理地直接使用收到的目标速度作为参考速度计算控制命令,然后将其输出至列车。两种控制策略下列车速度与加速度随时间变化曲线如图5所示。由于列车在巡航状态中目标速度恒定,两种控制策略下列车速度和加速度曲线没有区别,但列车在站前减速过程中,双周期速度跟踪算法在乘客舒适度和节能这两个指标上都优于直接控制策略。

图5 两种控制策略下列车速度与加速度随时间变化曲线
直接控制策略下,列车在未收到目标速度的CC控制周期时,依然使用上一个消息周期中的目标速度作为参考速度,造成了在初始减速阶段制动力较大且很快达到饱和限值,列车以-1 m/s2减速运行了近4 s。当列车进入站台低限速巡航区域时,列车速度曲线出现凹坑现象,其最小速度小于目标速度约3.5 km/h。
对比直接控制策略的控车效果,双周期速度跟踪算法下列车的速度、加速度曲线都比较平缓。列车从高限速巡航区域进入低限速巡航区域的过程中,其最大制动减速度为-0.7 m/s2,且初始制动平缓,控制命令未饱和。列车进入到站台低限速巡航区域时,控车状态从估计状态进入巡航状态,由于列车速度高于目标速度,保证了速度曲线平缓过渡而无明显的凹坑现象,避免了不必要的制动和牵引,降低了制动损耗,减少了运行时间约1 s,同时也更加节能。
4 案例分析
2号线在具备全线CBTC模式运营前,会存在一段时间的TBTC模式运营过渡期。上述双周期速度跟踪算法已经应用于2号线兼容性车载系统。根据现场应用结果反馈,车载ATO能够实现TBTC模式及不同运营等级下的阶梯形目标速度曲线平滑跟踪控制。
4.1 常用制动触发速度裕量
图6显示了列车满速运行时在站前减速过程中的常用制动触发速度、列车速度及两者之间的速度裕量。
由图6可见:列车速度一直低于常用制动触发速度;列车速度最接近常用制动触发速度的时刻是143.8 s,此时刚进入站台低限速区域,速度裕量仍有2.0 km/h;列车在减速过程中处于恒定限速区域,速度裕量维持在设定的2.5 km/h左右,最大速度裕量为5.3 km/h。

图6 列车满速运行时在站前减速过程中的常用制动触发速度、列车速度及两者之间的速度裕量图
4.2 不同运营等级场景下的ATO控车速度
现场设定了6个运营等级的列车速度曲线:等级一为列车满速运行,等级二至等级四为列车在满速的基础上分别乘以90%、80%和70%,等级五的限速为60 km/h,等级六的限速为40 km/h。通常早晚高峰时段选用运营等级一,非高峰时段选用运营等级三。图7和图8分别显示了运营等级一和运营等级三场景下的ATO控车速度曲线。由图7和图8可见:列车速度曲线跟踪平滑,控制命令也较为平缓,乘客舒适度较好,列车进入站台区域后速度曲线亦无凹坑现象,更加节能;运营等级三场景下列车在两个不同限速巡航区域的速度差比运营等级一的少20%,且减速过程中最大制动加速度仅-0.48m/s2,ATO控车更加平稳。

图7 运营等级一场景下的ATO控车速度、加速度曲线图
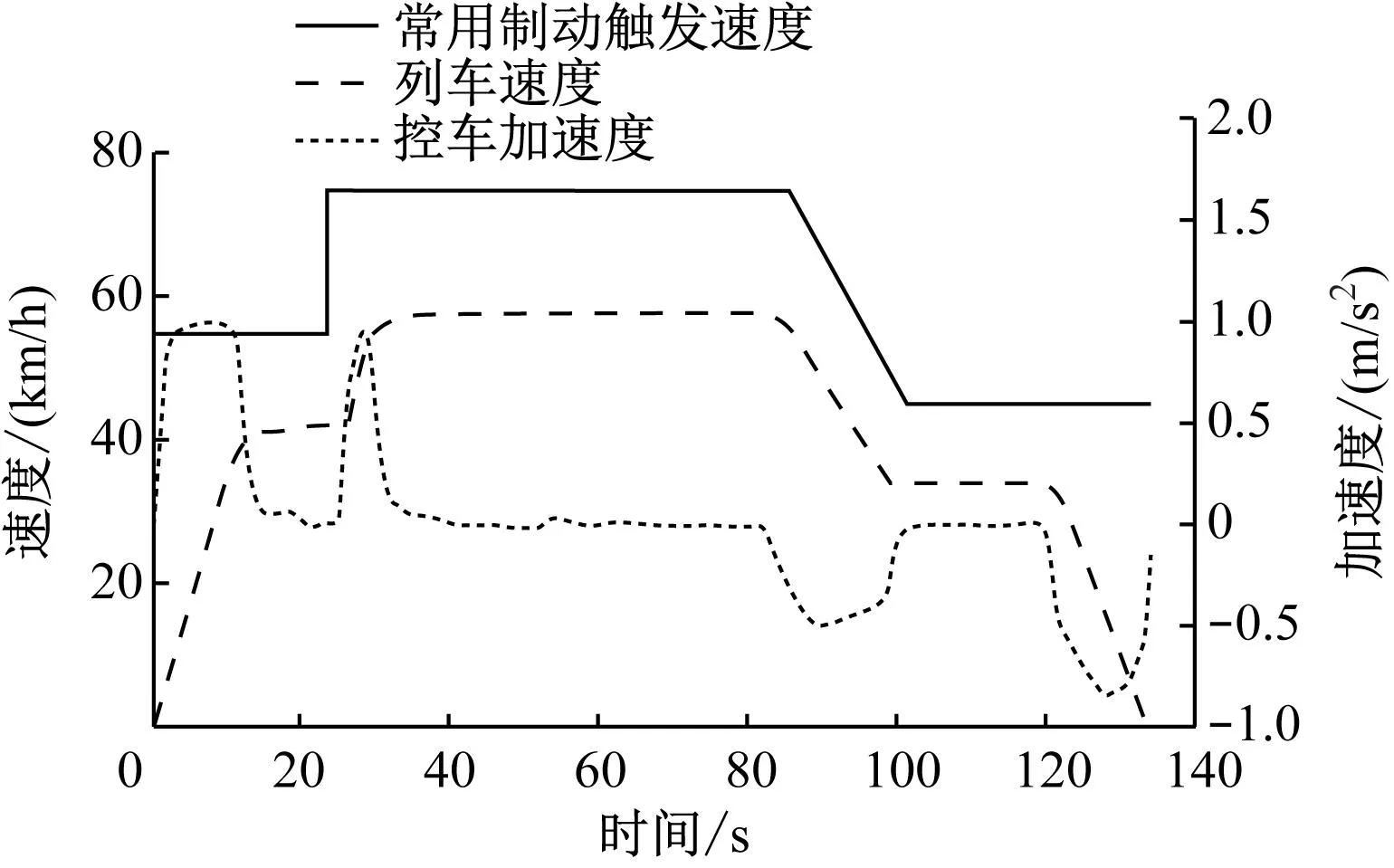
图8 运营等级三场景下的ATO控车速度、加速度曲线图
5 结语
针对城市轨道交通兼容性车载系统中目标速度消息周期大于车载控制周期,以及消息间隔不固定的特殊现象,给出了一种双周期速度跟踪算法来实现阶梯形目标速度的平滑跟踪目的。卡尔曼滤波算法可以从消息间隔不固定的目标速度命令中获得较为平缓的ak,拟平行参考速度跟踪控制策略实现了列车在站前减速过程中阶梯形目标速度曲线的平滑跟踪目的,避免了列车在减速初始阶段的大制动现象,同时也消除了列车进入低限速区域过程中的速度曲线凹坑现象,提高了乘客舒适度,减少了列车制动损耗,节约了牵引能耗。
