低成本接收阵列方向图测试系统与方法
2024-03-27王璇
王 璇
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引 言
传统的相控阵测试通常有外场[1]、近场[2]、暗室[3]等方法,这些测试方法的弊端包括:需要远场条件、干净的电磁环境或者复杂的专用设备;需要系统各部分完全齐套才能进行;各模块非理想因素叠加,使得问题定位困难,增加故障解决难度,同时降低研发效率。针对数字阵列和所使用的波束合成算法的测试系统,能够实现阶段性的功能和性能评估,有利于技术研发并提高系统验证效率,利用阵列信号模拟技术[4]能够在不依赖天线、远场及暗室条件下实现该需求。
阵列信号模拟技术可分为数字域[5]和模拟域[6]2类。由于雷达[7]、导航[8]、通信[9]与声纳[10]领域中使用的阵列信号模拟设备需要模拟多种场景、多制式信号并完成多种功能,因此通常采用实现复杂且成本较高的数字收发信道实现。本文针对接收阵列的方向图测试功能进行了系统简化设计,主要采用射频波束控制器来实现阵列信号模拟,避免了多通道数字接收所面临的同步、复杂滤波算法实现等困难,具备低成本、低复杂度、易于操作等特点,特别适合射频领域的开发使用。
1 接收阵列方向图测试平台与方法
以一维均匀线阵(ULA)为例,N单元阵因子方向图可以表述为:
(1)
式中:W为幅度加权向量;d为单元间距;ω为阵列工作的角频率;c为光速常数;括号内第1项为方位角θ方向来波在各单元形成的时延梯度;括号内第2项为将波束指向θB时,所需要设置的波束合成时延梯度。
在讨论波束合成算法时,主要讨论的是式(1)第2项;而对于本文所讨论的通过阵列信号模拟来进行方向图测试,则重点讨论的是第1项。
在后面的分析与仿真中,简化而不失一般性,假定采用单位加权并假定波束合成指向θB=0°时,式(1)可简化为:
(2)
在外场或暗室测试方法中,各单元时延梯度是连续变化的,但采用射频移相器或射频时延器来模拟空间来波方向,只能通过量化相位和量化时延来近似。假定来波方向θ时第n个单元对应的量化相位P(n,θ)可由(3)式求解:
(3)
式中:Pstep为射频移相器的量化步进;round[·]为四舍五入取整;mod[·]为取余数。
利用式(1)~式(3),图1所示由上位机、信号收发、波束控制器以及待测设备(DUT)所构成的测试系统就能够完成对接收阵列的方向图测试。

图1 测试系统构成框图
图1中的上位机主要通过软件完成对信号收发、波束控制器以及DUT的控制及数据处理,数据流和控制码通过网络接口或串口实现通信。
信号收发完成单音或调制信号产生与接收功能,通过商用的收发器代替矢网或信号源、频谱仪能够降低整个测试系统的复杂度和成本。
波束控制器完成信号分合路以及对每路信号进行幅度、相位和时延控制功能,通过使用双向放大器进行增益补偿,测试系统能够收发双向使用。
通过Matlab进行建模仿真,假定待测设备是1个N=16的ULA,阵列工作频率为1 GHz,采样速率为4 GHz,采样深度为1 024点,方位角一维扫描范围为-90°~+90°,测试扫描步进为1°,计算相位梯度采用无栅瓣半波长单元间距,波束控制器的移相步进为22.5°,待测设备和测试系统校准完成后残留随机相位差满足[-Pstep/2,Pstep/2]内的均匀分布,16通道仿真取表1所示的值。

表1 各通道的相位失配

图2 理想方向图与相位失配方向图对比
(4)
式中:b为带宽。


图3 测试仿真方向图与相位失配误差方向图对比
2 引入随机虚拟相移的均值方法与仿真
为了平滑图3直接测试得到方向图,对每个来波方向引入M组随机虚拟相移(RVPS)Θ(m,n,θ)。可以假定该相移满足均值为零、方差为Pstep/2的正态分布,Θ~N(0,Pstep/2),需要注意的是该虚拟相移只是用于消除系统相关相位误差,即式(3)在计算时使用ωndsinθ/c+Θ(m,n,θ),而不是ωndsinθ/c。在得到P(m,n,θ)后,通过式(5)计算得到平均后的阵因子方向图:
(5)
引入RVPS后的整个测试流程如图4所示,上位机控制信号收发产生ω单音信号,再控制DUT波束合成指向θB方向,生成M组随机虚拟相移,对空间来波方向θ进行计算并控制波束控制器的各通道,测试得到的原始数据流经过快速傅里叶变换(FFT)后,得到最大值的幅度和相位并存储,循环遍历测试得到M个幅度和相位,根据式(5)求平均得到θ方向的相应幅度,循环遍历方位角空间,最终绘制方向图。

图4 基于RVPS的均值方向图测试流程
依然采用第1节的仿真参数,同时设置M=15,对比图3和图5可知,引入RVPS的均值测试方法能够有效减小测试结果与误差方向图的偏离程度,使得远旁瓣、零点位置以及调零深度的测试更加准确。表2进一步对比了波束控制器不同移相步进,对比直接测试和引入随机虚拟相移测试的σmeasure,σmeasure的值明显减小,验证了方法的有效性。

表2 不同相位步进精度下σmeasure对比

图5 RVPS测试与相位失配误差方向图的对比
3 实测验证
依据图1所示框架搭建实际模拟波束测试系统,需要考虑信号收发方案和波束控制方案。
信号收发可以采用矢量网络分析仪、信号源和频谱仪以及软件无线电收发平台3种方案实现,使用式(5)描述的方法需要2个条件:触发可控的发射正弦信号以及包含幅度和相位信息的接收信号。矢量网络分析仪虽然能够获得幅相信息,但难以实现触发控制,而信号源和频谱仪只能获得幅度信息,软件无线电收发平台可以通过波形设计和硬件配置满足上述2个条件。
波束控制器可以选择移相、时延、移相结合时延3种方案实现。移相器方案的优势是可以跨周期使用,因此阵列尺寸和扫描角度不受限制,但宽带测试时每个频率都需要独立设置,测试效率低,同时可选移相器的频率覆盖范围相对较窄;时延方案的优点在于宽带测试效率较高,同时射频覆盖范围较宽,缺点是真时延无法跨周期使用,阵列尺寸和扫描角度受限;移相结合时延能够结合二者的优点,但实现较复杂且成本较高。
实际搭出的测试系统如图6所示。综合考虑实现成本、便携性、频率覆盖范围和宽带测试的需求,选择基于ADRV9009+ZC706的软件无线电收发平台完成信号收发,该平台能够实现75~6 000 MHz的单音信号实时收发。采用1入16出、工作频率覆盖0.5~6 GHz的时延波控器实现波束控制,该时延器通道间幅度不一致性<±1 dB,延时置零状态下相位不一致<±5°,时延控制8位,时延步进为14 ps,最大时延量>7 154 ps。验证待测DUT选择1个16入1出、工作频率为0.5~6 GHz的合路器。
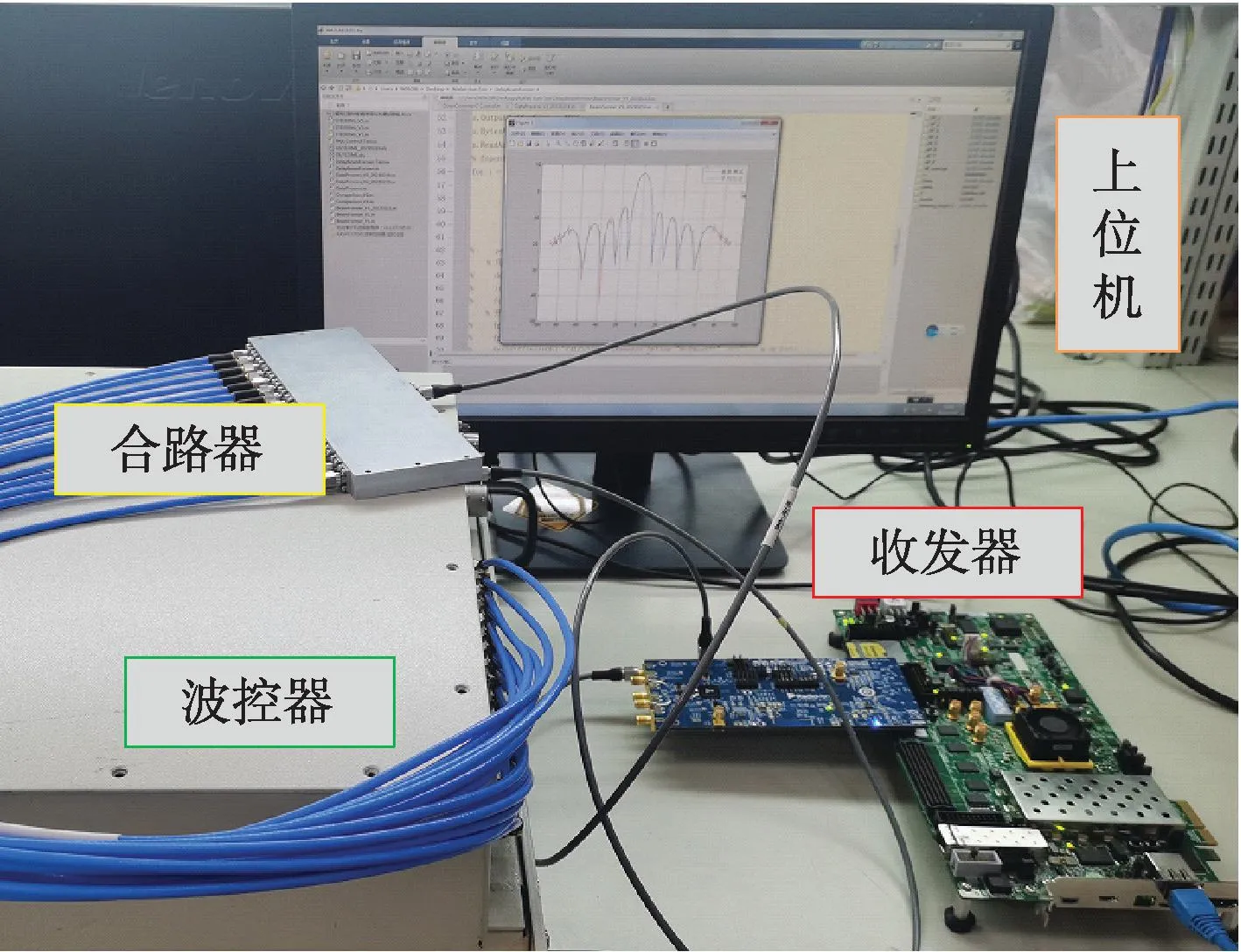
图6 实际搭建的测试系统
图7为工作频率1.8 GHz、单元间距50 mm的16单元ULA方向图测试结果,DUT合路器不包含波束扫描功能,因此方向图主波束指向0°。对比了直接测试方法和平均测试方法,平均测试方法在大角度波动上远小于直接测量方法。

图7 频率1.8 GHz方向图对比
图8为工作频率3.8 GHz、单元间距30 mm的16单元ULA方向图测试结果。同1.8 GHz测试相同,平均方法有效降低了方向图大角度部分的波动,但3.8 GHz方向图整体上波动要大于1.8 GHz方向图。
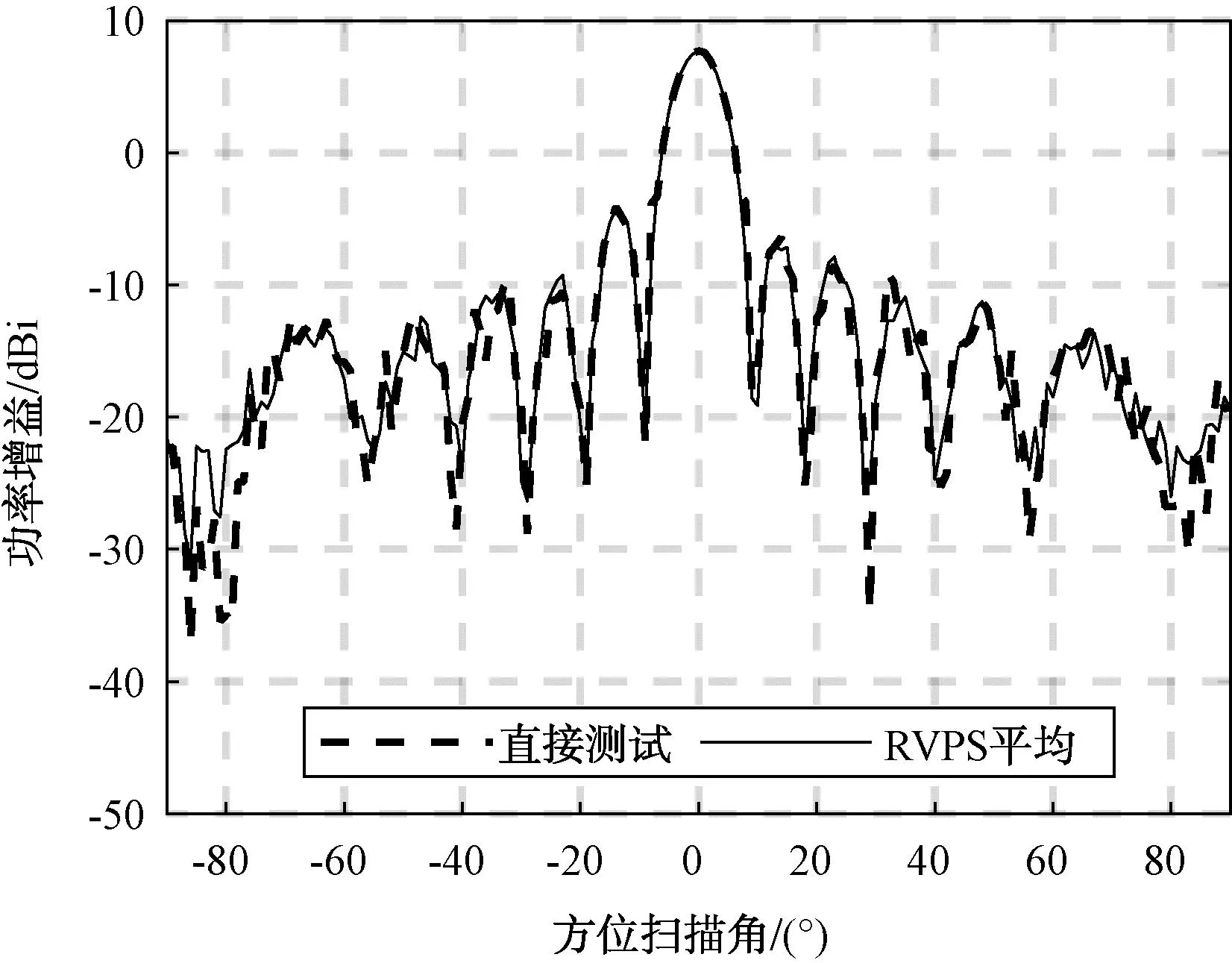
图8 频率3.8 GHz方向图对比
经过实际测试验证,图6所示的系统能够完成对DUT的方向图测试,所提出的RVPS方法也能够降低由于量化所导致的测试波动,但从图7和图8的测试结果看,需要进一步讨论和改进以下2点。
首先,测试系统包含波控器本身性能的影响,一方面,波控器本身存在损耗或增益,得到的法向增益也同理论的10·lg16=12.04有差距;另一方面,波控器通道间幅相不一致性、不同时延态下的附加损耗和相移都会影响副瓣电平和调零深度的测试结果。
其次,量化时延导致方向图畸变,在高频影响比在低频严重,这是由于采用14 ps量化时延,它在1.8 GHz频率所对应的相位误差为±4.5°,而在3.8 GHz所对应的相位误差为±9.6°,因此图8所示的方向图测试结果要比图7差。
要改进以上2点,可以通过使用移相器结合时延方案代替单纯时延线方案来实现,也可以通过减小时延步进来实现,但在测试准确度和精确度提升的同时,也增加了测试系统的复杂度和成本。
所提出的测试系统特点是容易搭建且软件工作量少,主要适用于低成本的快速评估阵列性能和算法,如果需要高精度的测试,采用数字实现的阵列信号模拟器可能是更好的选择[5]。
4 结束语
提出了一种低成本的接收阵列方向图测试系统提高测试精度的方法。该系统不依赖外场条件与阵列的物理排布,能够适应数字阵列体制和模拟阵列体制的收发测试,适合用于评估射频与数字链路、波束合成以及干扰调零等性能。本文对于提高数字阵列研发效率和降低测试复杂度具有一定的工程价值。