基于时域动态过程的变速抽蓄机组外部故障短路电流计算方法
2024-03-26卢庆辉尹项根刘之畅王义凯朱凌进毛冀龙
卢庆辉,乔 健,尹项根,刘之畅,王义凯,朱凌进,毛冀龙
(1.华中科技大学 强电磁工程与新技术国家重点实验室,湖北 武汉 430074;2.华中科技大学 电力安全与高效湖北省重点实验室,湖北 武汉 430074)
0 引言
相较于传统的定速抽蓄机组,变速抽蓄机组(variable speed pumped storage unit,VSPSU)在运行范围、运行效率等方面具有更加出色的表现并且摆脱了传统机组仅作为计划调峰调频的限制[1-3]。VSPSU 可以为电力系统的去碳化提供更好的支撑,建设以VSPSU 为核心的大型可变速抽水蓄能电站已经成为了一种新趋势[3-4]。在VSPSU 的内部故障及保护研究方面,文献[5-6]应用多回路理论分析了VSPSU定、转子绕组的内部故障特性,并基于定子侧分支谐波环流特征提出了励磁绕组内部故障保护方法;文献[7]基于定、转子多分支电压及磁链方程建立了VSPSU 内部故障模型,并通过仿真计算对主保护方案进行了优化配置。目前,已有相关学者对VSPSU 内部故障进行了较为深入的研究,但是鲜少有针对VSPSU外部故障特性的研究。
VSPSU 励磁结构与控制方式特殊[8-9],其外部故障短路电流与传统同步发电机相比差异巨大,为满足变速抽水蓄能电站设备选型以及继电保护等工作的需要,亟需对VSPSU 外部故障短路电流特性及计算方法展开研究。VSPSU本质上是一种大型双馈感应电机,其特点和双馈风机相似,但VSPSU 的励磁系统更为复杂。参考国外已经投运的变速机组和我国在建的工程项目,VSPSU 往往采用了多组并联的中点箝位式三电平背靠背变流器进行励磁[10-11]。此外,为了保护变流器及机组,VSPSU的励磁系统中还装设了跨接器保护,类似于双馈风机的撬棒,在外部故障严重时跨接器便会动作。但是VSPSU 的跨接器往往采用晶闸管作为开关器件,因此只能控制投入,不具有双馈风机“主动型撬棒”的控制切出功能[12],跨接器在VSPSU 机端断路器动作进而消除短路电流前会一直投入。
对于双馈风机外部故障短路电流的研究,现有文献通常将双馈风机的外部故障分为远区非严重故障(持续励磁)[13-14]和近区严重故障(撬棒动作)[15]2 种情况,并分别建立等效计算模型继而得到故障电流的解析表达式。但在非严重故障下,短路电流的计算基于故障期间双馈风机保持正常的运行方式,并未考虑穿越控制的影响。文献[16-17]分析了低电压穿越控制策略对励磁的影响机理,建立了计及控制策略影响的双馈风机暂态模型。此外,考虑到撬棒在严重故障发生的瞬间不会瞬时动作,文献[18]通过以转子磁链作为衔接推导了计及撬棒保护动作时间的双馈风机短路电流表达式;文献[19]提出了一种考虑控制切换过程的双馈风机短路电流计算方法;文献[20]提出了一种具有一般意义的双馈风机的暂态分析方法,并求出了转子故障电流的精确解析式,但该方法并未考虑撬棒动作的情况和定子电流的暂态特性。就工程应用层面而言,现有研究中双馈风机外部故障短路电流的形式一般较为复杂,各部分的物理机理难以理解,并且解析式包含较多的中间变量需要求解,不便于工程使用。
为获得物理机理明确且具有工程实用意义的VSPSU 外部故障短路电流解析式,本文将VSPSU 的外部故障视为动态电路的转换过程,并提出了基于时域动态过程的VSPSU 外部故障短路电流计算方法。根据VSPSU 的励磁及控制特点,将外部故障下的VSPSU 分为持续励磁和跨接器动作2 种情况,并分别建立了2 种情况下基于空间矢量的时域动态电路模型。基于所建立的动态模型及过渡边界条件,并结合定子磁链动态特性推导了VSPSU 外部故障短路电流解析式。PSCAD/EMTDC 仿真分析结果证实了本文所提计算方法的有效性。
1 VSPSU的电磁暂态模型
1.1 VSPSU的空间矢量模型
VSPSU 采用三相交流励磁绕组结构,定子侧直接连接到电网,转子侧经过多级并联的背靠背变流器与电网相连,如图1所示。

图1 VSPSU结构示意图Fig.1 Structural diagram of VSPSU
若VSPSU 定子侧和转子侧均采用电动机惯例,忽略元器件磁饱和现象,并将转子侧参数转换到定子侧,可得到VSPSU 在静止(定子)坐标系下的空间矢量电压方程和空间矢量磁链方程[21-22],分别如式(1)、(2)和式(3)、(4)所示。
式中:p 为微分算子;ψs和ψr分别为定、转子磁链空间矢量;us和ur分别为定、转子电压空间矢量;is和ir分别为定、转子电流空间矢量;Rs和Rr分别为定、转子电阻;Lm为励磁电感;Ls、Lr分别为定、转子电感,Ls=Lm+Lσs,Lr=Lm+Lσr,Lσs和Lσr分别为定、转子漏感;ωs为定子电压、电流角频率;ωr为转子电压、电流角频率;ωm为转子角频率。
对式(3)进行变换得到:
由式(6)可知,VSPSU 外部故障短路电流(定子电流)由故障下的定子磁链与转子电流动态特性共同决定。
1.2 外部故障下的定子磁链动态解析式
VSPSU 在正常运行状态(t<0)下的定子侧电压为一个以恒幅值Us以及以同步角频率ωs旋转的空间矢量,定义为:
将式(7)代入式(1),并忽略定子电阻得到定子磁链在正常情况下的稳态值为:
在发生外部短路故障后,VSPSU 机端电压往往发生跌落,定义跌落深度k,此时定子侧电压为:
利用式(1)和式(6),得到定子磁链的动态方程为:
该微分方程的解可分为两部分,即磁链自由分量ψsn与磁链强制分量ψsf。式(10)等号右侧第一项作用于产生定子磁链强制分量,第二项作用于阻尼定子磁链自由分量,第三项用于表述转子电流对定子磁链自由分量变化的影响。定子磁链可表示为:
由式(8)可知,磁链强制分量的幅值与电网电压成比例,因此根据式(9)可得到:
由于磁链是不能突变的,为了保证故障前后磁链的连续性即产生了磁链自由分量,因此磁链自由分量是由电压变化引起的暂态分量。对于VSPSU的电流控制环,磁链自由分量相当于扰动。一般VSPSU 控制环的带宽较大,抗扰动能力较强,自由电机转子电流会很小,电机的状态相当于转子开路,因此磁链自由分量会以定子时间常数τs=Ls/Rs衰减[21]。根据式(8)、(11)、(12)得到磁链自由分量为:
因此得到外部故障下磁链的动态解析式如式(14)所示。
对于VSPSU转子电流动态解析式的求解需要根据外部故障下的励磁控制策略予以相应的考虑。通常情况下,根据VSPSU 外部故障引起电压跌落的严重程度可分为变流器持续励磁和跨接器动作2 种情况。2 种情况下的转子电流变化不同,因而VSPSU外部故障下的定子短路电流也存在较大差异,需要分别考虑。
2 持续励磁下的定子短路电流计算
在VSPSU 外部非严重短路故障或远区短路故障下,机端电压跌落程度往往较低,此时跨接器不会动作,变流器持续励磁。1.2节已经推导了VSPSU外部故障下定子磁链的动态解析式,下面首先推导外部故障持续励磁情况下的转子电流,并进一步得到外部故障持续励磁情况下的定子短路电流。
2.1 故障前的转子回路等效模型
将式(6)代入式(4)得到定、转子磁链之间的关系为:
式中:σ为漏磁系数,σ=1-L2m/(LsLr)。
将式(2)和式(15)合并得到静止坐标系下的转子回路方程为:
图2为本文VSPSU 空间矢量数学模型在不同坐标系下的转换关系。图中:αβ为静止坐标系;DQ为转子坐标系,与实际转子角速度对应;dq为同步坐标系,与工频角速度对应;θm为转子坐标系角位置(转子电角位置);θs为同步坐标系角位置;θr为转子坐标系与同步坐标系夹角。
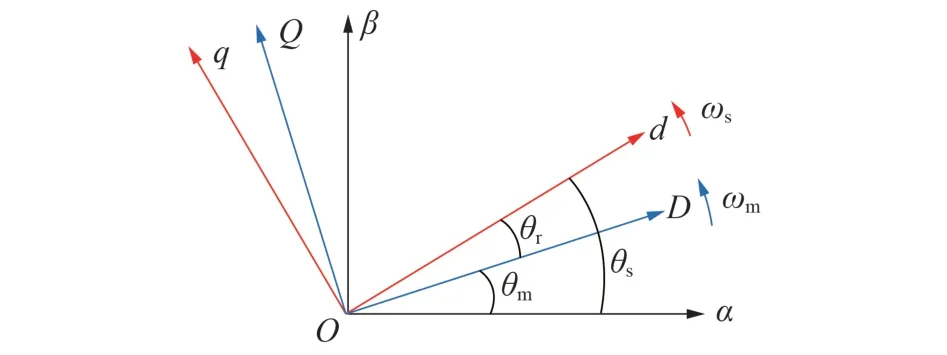
图2 不同坐标系之间的关系Fig.2 Relationship among different coordinate systems
为得到转子回路方程的实际物理意义,根据不同坐标系之间的转换关系,在式(16)两边同时乘以e-jθm(e-jωmt),整理得到转子坐标系下的转子回路方程为:
式中:上标“r”表示转子坐标系。
由式(17)可知,转子回路方程等号右侧第一项为定子磁链在转子绕组中产生的感应电动势,即转子端口电压;第二项为转子电流在转子电阻Rr和转子暂态电抗σLr下产生的压降。因此得到转子等效电路如图3所示。
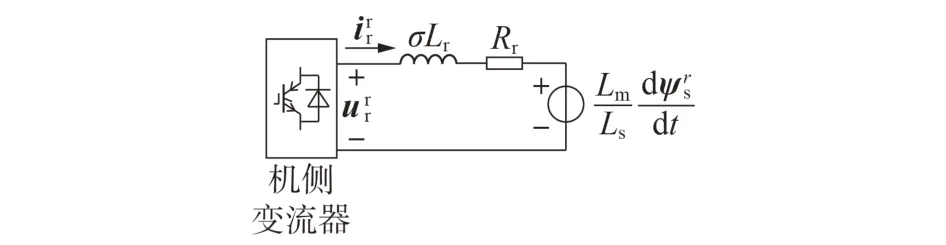
图3 VSPSU转子等效电路Fig.3 Rotor equivalent circuit of VSPSU
将式(8)两边同时乘以e-jθm(e-jωmt),整理得到VSPSU故障前转子坐标系下的定子磁链为:
进一步将式(18)代入式(17)等号右侧的第一项得到VSPSU故障前转子端口电压为:
式中:s为转差率。
2.2 故障后的转子动态电路建模及解析
VSPSU发生外部故障后,定子磁链由式(8)变为式(14),将式(14)两边同时乘以e-jθm(e-jωmt),得到VSPSU故障后转子坐标系下的定子磁链解析式为:
将磁链解析式(20)代入式(17)等号右侧的第一项,并忽略幅值中的1/τs(其值很小),得到故障后的转子端口电压为:
由式(21)可知,外部故障下的转子端口电压与定子磁链具有相同的形式,均由强迫分量和自由分量组成,分别如式(22)、(23)所示。
发生外部故障时除了转子端口电压发生变化,受到励磁控制的影响,机侧变流器的输出电压也发生变化,忽略相位角,此时机侧变流器输出电压由变为。
式中:Urc为故障后机侧变流器输出电压幅值。
因此发生外部故障后,VSPSU 转子回路方程变为:
上述过程可视为转子回路由正常运行状态切换到故障状态的动态过程。根据式(17)和式(25)得到VSPSU 持续励磁下的转子动态电路如图4 所示。图中:S1、S2为开关状态。
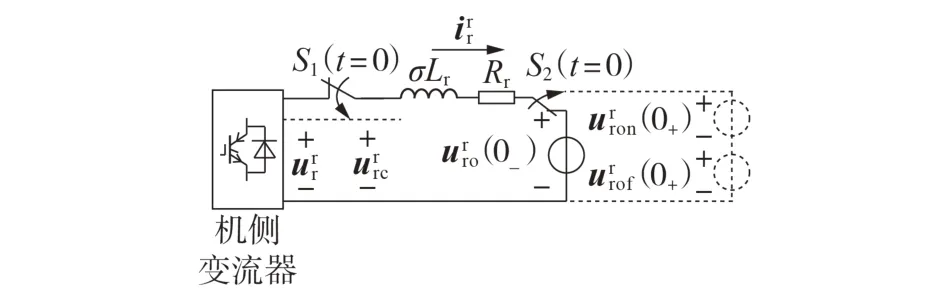
图4 VSPSU持续励磁下的转子动态电路Fig.4 Rotor dynamic circuit under continuous excitation of VSPSU
该动态电路的解包含由3 个激励产生的强迫分量(交流分量)和由于换路且电感电流不能突变而产生的自由分量(直流分量),如式(26)所示。
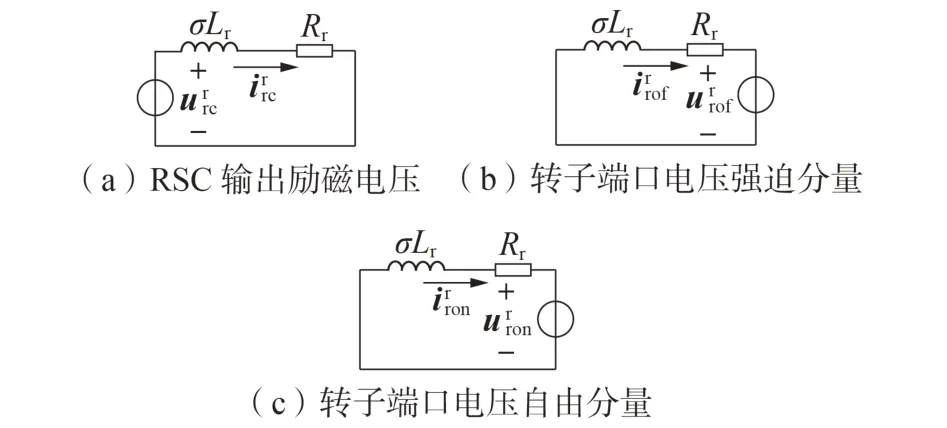
图5 VSPSU持续励磁情况下,应用叠加定理的转子等效电路Fig.5 Rotor equivalent circuit using superposition theorem under continuous excitation of VSPSU
根据图5(a)及式(24)可得:
根据图5(b)及式(22)可得:
将式(27)—(29)相加,得到转子电流强迫分量如式(30)所示。
进一步求取由于换路产生的自由分量,根据电路理论,自由分量可表示为:
式中:τr=σLr/Rr。
由换路定律可知:
定义正常运行状态下转子电压为:
进一步根据正常运行状态下的转子端口电压表达式(19),得到故障前的转子电流为:
根据式(32)、(34)可得:
根据式(30)可得:
将式(35)、(36)代入式(31)得到转子电流自由分量如式(37)所示。
将式(30)、(37)相加得到VSPSU 外部故障并持续励磁下的转子电流解析式为:
至此,得到了持续励磁情况下的定子磁链解析式(14)及转子电流解析式(38)。式(38)为转子坐标系下的解析式,还需将其两边同时乘以ejθm(ejωmt)转化到静止坐标系中和式(14)一同代入式(6),得到VSPSU持续励磁下的定子短路故障电流为:
由式(39)可知,VSPSU 外部故障并持续励磁情况下的定子短路电流包含3 个部分:以同步速旋转的稳态交流分量,该分量由转子励磁电压、定子磁链强迫分量及其在转子中的感应电压产生;以转子电角速度旋转并以时间常数τr呈指数衰减的暂态交流分量,该分量是由于转子等效电路中电感电流不能突变而产生的自由分量,显然以转子等效时间常数τr衰减;以时间常数τs呈指数衰减的暂态直流分量,该分量由定子磁链自由分量及其在转子中的感应电压产生,显然随定子磁链自由分量以定子时间常数τs衰减。
3 跨接器动作下的定子短路电流计算
在VSPSU 近端严重短路故障情况下,转子侧会产生很大的暂态能量,进而引起转子侧的过电压和过电流。为避免造成VSPSU 励磁变流器的损坏,此时VSPSU 往往会立刻闭锁变流器并投入跨接器。VSPSU 的跨接器类似于双馈风机的撬棒保护,都是通过将转子绕组短接到低电阻上,从而使得外部故障下变流器端具有较低的电压。同时,跨接器保护也是VSPSU实现低电压穿越的一种措施。
根据式(17)和式(40)得到VSPSU 跨接器动作时的转子动态电路如图6 所示。和持续励磁情况下相似,图6 所示的动态电路的解也由两部分组成,公式同式(26),但第一部分是由2 个激励产生的强迫分量(交流分量),第二部分是由于换路且电感电流不能突变而产生的自由分量(直流分量)。

图6 VSPSU跨接器动作下的转子动态电路Fig.6 Rotor dynamic circuit under crowbar action of VSPSU
首先对2 个激励产生的强迫分量(交流分量)进行求解,应用叠加定理后的等效电路如图7所示。
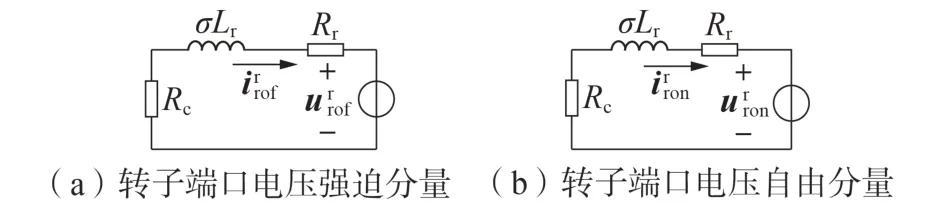
图7 应用叠加定理的转子等效电路(VSPSU跨接器动作)Fig.7 Rotor equivalent circuit using superposition theorem under crowbar action of VSPSU
根据图7(a)及式(22)可得:
进一步求取由于换路产生的自由分量,根据电路理论,自由分量可表示为:
式中:τ'r=σLr/(Rc+Rr)。
根据式(43)可得到:
将式(35)、(45)代入式(44)得到转子电流自由分量为:
将式(43)、(46)代入式(26)得到VSPSU 外部故障且跨接器动作下的转子电流解析式为:
式(47)为转子坐标系下的解析式,还需将其两边同时乘以ejθm(ejωmt)转化到静止坐标系中和式(14)一同代入式(6),得到VSPSU 外部故障且跨接器动作情况下的定子侧短路故障电流为:
由式(48)可知,VSPSU 在外部故障并且跨接器动作情况下的定子短路电流由三部分组成:以同步速旋转的稳态交流分量,该分量由定子磁链强迫分量及其在转子中的感应电压产生;以转子电角速度旋转并以时间常数τ'r呈指数衰减的暂态交流分量,该分量是由于转子等效电路中电感电流不能突变而产生的自由分量,显然以转子等效时间常数τ'r衰减;以时间常数τs呈指数衰减的暂态直流分量,该分量由定子磁链自由分量及其在转子中的感应电压产生,显然随定子磁链自由分量以定子时间常数τs衰减。
对比式(39)、(48)可知,持续励磁和跨接器动作情况下的VSPSU 短路电流组成分量具有相同的形式,但是电流解析式的幅值及衰减时间常数存在差异。此外,当VSPSU 外部故障造成电压完全跌落(k=1)且故障不切除时,在长时间尺度下跨接器动作最终会使短路电流降为0,即不存在稳态分量,而持续励磁下会始终存在稳态电流分量。这和跨接器动作后的实际情况是相符的。
4 仿真研究
为了验证本文所提VSPSU 短路电流计算方法的正确性,利用PSCAD/EMTDC 搭建VSPSU 外部故障仿真模型并进行验证。VSPSU网侧采用电网电压定向矢量控制,机侧采用定子磁链定向矢量控制,控制系统原理图见附录A 图A1。VSPSU 的相关参数见附录A 表A1。VSPSU 初始工作于发电状态,额定功率因数为0.9,即有功功率为302.4 MW,无功功率为146.5 Mvar。
在VSPSU 机端设置三相对地短路故障,使机端电压跌落至额定电压的80 %,此时电压跌落程度较低,变流器持续励磁。故障时刻设置在A相过零点,仿真结果与计算结果如附录B 图B1 所示。由图可以看出,持续励磁控制下的定子短路电流仿真结果和计算结果基本吻合。工程中常用冲击电流的有效值来校验电气设备的耐力强度以及利用故障后第1 个周期的基波有效值来校验继电保护。提取短路故障后的第1 个周期的仿真与计算冲击电流有效值分别为21.55、21.85 A,两者的相对误差为1.4 %。进一步利用傅氏算法提取故障后第1 个周期的仿真结果与计算结果的基波有效值分别为20.52、19.86 A,两者的相对误差误差为3.2 %。由此可知,仿真结果和计算结果误差较小,本文所提短路电流计算方法可以有效计算电压跌落程度较轻情况下的短路故障电流。
进一步进行跨接器动作情况下的验证。在VSPSU 机端设置三相对地短路故障,并设置较小的故障电阻使机端电压跌落至额定电压的10 %,此时由于电压跌落程度较高,转子电流及电压过冲较大,为保护变流器跨接器动作。故障时刻仍设置在A 相过零点,仿真结果与计算结果如附录B 图B2 所示。跨接器动作情况下定子短路电流长时间尺度的变化如图B2(a)所示,故障点附近的短路电流变化如图B2(b)所示。提取短路后的第1 个周期的仿真与计算冲击电流有效值分别为57.74、58.05 A,两者的相对误差为0.5 %。进一步利用傅氏算法提取故障后第1 个周期仿真结果与计算结果的基波有效值分别为43.17、44.01 A,两者的相对误差误差为1.9 %。可知,故障后较短时间内计算结果与仿真结果基本吻合,误差较小,但随着时间尺度的拉长,计算结果与仿真结果出现较大的误差。
实际上,由于此时的短路故障较为严重且跨接器的长时间投入,VSPSU 在长时间尺度下失去了稳定性,转速不断上升(如附录B 图B3 所示),造成转差率持续变化,而本文所提计算方法中默认故障前后的转差率不变,因此计算结果和仿真结果的误差随着时间会变大,这也是需要进一步考虑和改进的地方。但就短时间尺度而言,本文所提短路电流计算方法在跨接器动作情况下依然具有较高的精确度,满足工程应用需要。
5 结论
本文根据VSPSU 外部故障下的励磁及控制特点,将VSPSU 外部故障分为持续励磁和跨接器动作2 种情况,并基于动态电路建模,提出了一种基于时域动态过程的外部故障短路电流计算方法,并得到以下结论。
1)持续励磁和跨接器动作情况下,VSPSU 外部故障短路电流所含各分量形式相同,均由稳态交流分量、呈指数衰减的暂态交流分量以及衰减的暂态直流分量组成。但是2 种情况下的短路电流各分量幅值不同、暂态分量的衰减时间常数不同,受到外部故障影响的程度也不同。
2)根据外部故障短路电流解析式得到的计算结果与PSCAD/EMTDC 仿真结果基本吻合,能够再现VSPSU 外部故障短路电流变化特性,因此本文所提方法具有较好的准确性及实用价值,能满足变速抽水蓄能电站一次设备选型以及继电保护等工作的需要。
附录见本刊网络版(http://www.epae.cn)。
