汽车电子机械制动器失效容错控制方法研究
2024-03-25罗晨晖吴贺利
罗晨晖,吴贺利
(武汉城市学院机电工程学部,湖北 武汉 430075)
0 引言
汽车电子机械制动器制动作用的可靠性是影响汽车安全稳定行驶[1]的重要因素。为有效保障汽车的安全稳定行驶[2-3],迫切需要研究一种行之有效的控制方法。
赵剑飞等[4]提出了基于多盘式永磁同步电机协同优化对汽车电子机械制动器失效容错控制方法;欧健等[5]提出了基于故障估计对汽车电子机械制动器失效容错控制方法。二者均一定程度上实现了对汽车电子机械制动器失效的容错控制,但受环境因素以及技术条件等影响,汽车电子机械制动器失效容错控制的效果有待进一步优化。
本文充分考虑电子机械制动器控制原理,提出一种新的汽车电子机械制动器失效容错控制方法。
1 电子机械制动器失效容错控制
1.1 电子机械制动器控制原理
汽车电子机械制动器架构包含执行器、中央与底层控制器以及各种机械制动控制设备。汽车电子机械制动器架构如图1所示。
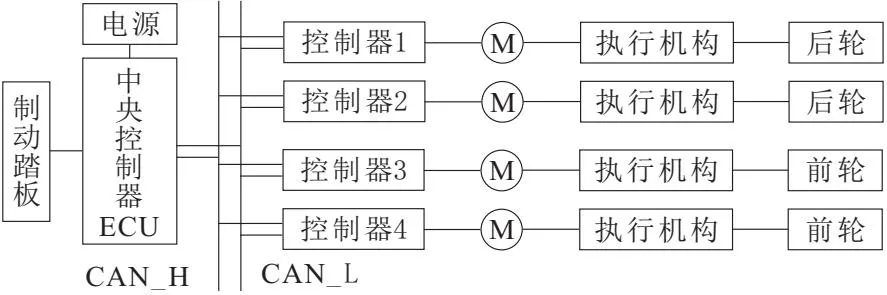
图1 电子机械制动器架构
当汽车制动器制动时,受汽车驾驶员的制动力作用影响,制动踏板在汽车驾驶员制动作用下产生制动力大小以及速度等重要制动信息,并执行有效的信号转化操作,供中央控制器使用[6-7]。中央控制器将处理后的制动信号放入各执行器做进一步制动信号处理,之后将经过2次处理操作的制动信号发送至各控制器。各控制器接收到制动信号后,对制动信号实施电机电压控制量转换操作,并利用所获控制量推动电机以及制动盘正常合理运转,以保证汽车制动的完成质量。
1.2 基于SVM的电子机械制动器失效行为检测
容错控制可在汽车电子机械制动器发生失效状况时,保障汽车继续以基本正常的工作状态进行安全运行[8-9]。容错控制的优势在于可针对不同的失效情况采取不同的容错措施,因此,有效诊断汽车电子机械制动器失效类型是实现对汽车电子机械制动器失效容错控制的前提,为此,本文利用SVM对汽车电子机械制动器失效行为进行检测。
1.2.1 SVM算法原理
SVM算法在检测汽车电子机械制动器失效行为方面优势显著,原因在于其拥有一般分类算法无法比拟的数据泛化能力[10]。将用于检测电子机械制动器失效行为的数据样本表示为:(x1,y1),(x2,y2),…,(xm,ym)。其中,数据样本数量、输入的维数以及n维空间分别用m、n、Rn代表;x、y为n维空间内的数据样本,且x∈Rn,y∈[+1,-1]。当y=1时,说明该数据样本隶属的数据类别为第1类;若y=-1,则代表该数据样本隶属的数据类别为第2类。利用SVM算法对数据样本执行分类操作的实质就是通过一些合理有效的措施构造分类决策函数进而将数据样本进行有效合理划分的过程。
在线性条件下,对数据样本进行有效合理划分的首要任务是获取一个泛化功能强劲的分类超平面,从而将不同类数据样本成功分离。将该分类超平面用公式表示为
G∶wTx+b=0
(1)
式中:b为常数;w为权值向量。
在式(1)分类超平面的左右两侧各构建1个超平面,将左右两侧的超平面表示为G1、G2,此时将G1、G2上存在的数据样本视为支持向量,满足
(2)
由于分类超平面并不是只存在1个,那么单纯以不唯一的分类超平面完成数据样本的划分是不合理的,数据集样本划分的准确度也不会高,因而,为有效划分数据样本定义并寻找最优超平面。
用d1、d2分别代表G1、G2到G的距离;d1+d2代表G1到G2的距离 ,那么对d1+d2执行最大化操作实质上就是对‖u‖2执行最小化操作。基于此,最优超平面的求解问题可通过对二次规划问题进行求解实现,即
min(d1+d2)×yi(wT+b)≥1
(3)
式中:yi为二次规划结果,i=1,2,…,l。
使用拉格朗日函数对式(3)求解,有
(4)
式中:αi为拉格朗日乘子,且αi≥0。
按鞍点定理中的相关描述,拉格朗日函数的鞍点是决定式(3)问题得以解决的关键。一般状况下,获得的解中多数的αi值均为0,将与αi相称的xi看成是支持向量,对于超平面的法方向表示为
(5)
式中:l为电子机械制动器出现失效行为之前的采样区间。
通过代入操作可获得关于式(3)的对偶问题,对式(5)进行求解即可获得分类决策函数为
(6)

1.2.2 构建失效行为检测模型
在汽车的电子机械制动过程中,参与汽车电子机械制动工作的数据通常是由电压、转速以及压力传感器提供[11]。因而利用SVM算法对汽车电子机械制动器失效行为检测时,失效检测数据也来自上述3种传感器。根据SVM理论,汽车电子机械制动器失效行为检测工作主要包含失效预测与失效辨识2部分。
用q(r)、q′(r)分别代表汽车电子机械制动器的输出信号与SVM预测模型的预测输出信号,e(r)代表残差,其中,r代表电子机械制动器出现失效行为的时间。三者之间存在的关系为
e(r)=q(r)-q′(r)
(7)
当e(r)接近0时,证明此时汽车电子机械制动器没有发生失效;当e(r)远离0时,则证明汽车电子机械制动器存在失效现象。在实际的失效行为判别工作中,多数情况下会选取合适的阈值[12],用于与e(k)相比较,从而更为准确地判别汽车电子机械制动器失效行为。构建的SVM汽车电子机械制动器失效行为检测模型如图2所示。

图2 制动器失效检测模型
1.2.3 划分电子机械制动器失效行为
在检测到汽车电子机械制动器失效行为后,通过设计电子机械制动器失效分类器可以进一步划分电子机械制动器失效行为。其步骤可归结为:
a.采取合适的方式对失效信息执行有效的预处理操作。去除数据中的伪失效信息并对数据进行降维处理,获得运算复杂度较低的电子机械制动器失效数据训练样本[13]。
b.确定符合进一步划分电子机械制动器失效行为需求的核函数以及核参数。
c.根据SVM算法中的相关描述,对支持向量进行相关求解操作并以获得支持向量为主要依据构建最优分类超平面。
d.利用SVM决策分类函数对待测电子机械制动器失效行为数据训练样本执行迭代操作,最终完成电子机械制动器失效行为的进一步划分。
1.3 传感器自适应容错控制模型构建
在构建自适应容错控制模型之前,首要任务是对各参与汽车电子机械制动工作的信息采集传感器执行有效的重构操作[14]。
可将重构后的转速传感器模型表示为
(8)

可将重构后的压力传感器模型表示为
(9)
式中:ωr-1为r-1时刻的转速。
可将重构后的电流传感器模型表示为
(10)
利用式(8)~式(10)中的任意2种重构模型,并结合电子机械制动器执行器数学模型可实现对第3个传感器信号的合理估计。
基于此,本文构建自适应容错控制模型完成汽车电子制动失效容错控制,模型架构如图3所示。
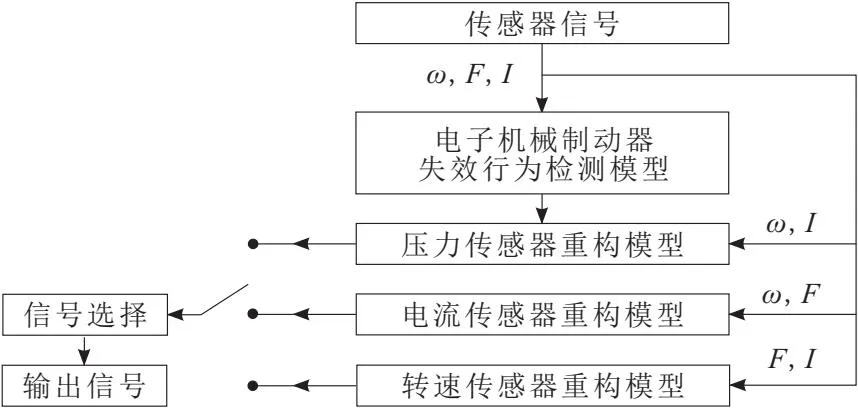
图3 制动器失效容错控制模型
在制动器失效容错控制模型中,将传感器采集到的电流、压力以及转速数据信号发送至电子机械制动器失效行为检测模型后,将所获电子机械制动器失效行为检测结果作为输入,输送至各传感器重构以及信号转换模型,达到制动器失效容错控制的目的。需要指出的是,该模型的优势在于当制动系统中只有2个传感器可以正常工作时,可以通过正常工作的传感器信号对第3个传感器的信号进行有效估计[15],这样就可以在某个传感器不能正常工作时,及时对其进行有效的阻断处理,通过估计的传感器信号代替被阻断传感器信号工作,从而保障汽车电子机械制动器失效容错工作的正常进行。
2 实验与分析
实验以某大型汽车厂生产的某类型汽车为实验对象,应用本文方法对其进行汽车电子机械制动器失效容错控制,验证本文方法在汽车电子机械制动器失效容错控制方面的优势。
2.1 实验设置
实验测试汽车发动机为柴油机,整车满载2 500 kg,制动系统主要构成如下:双膜片真空助力器、真空度由机械式真空泵提供,制动主缸为双腔式,管路是H型布置,后制动回路上有感载比例阀装置,前制动器为盘式,后制动器为鼓式。该汽车失效类型包括卡死失效、恒偏差失效和恒增益失效3种。
2.2 结果分析
应用本文方法对汽车电子机械制动器失效进行容错控制获得的容错控制结果如表1所示。
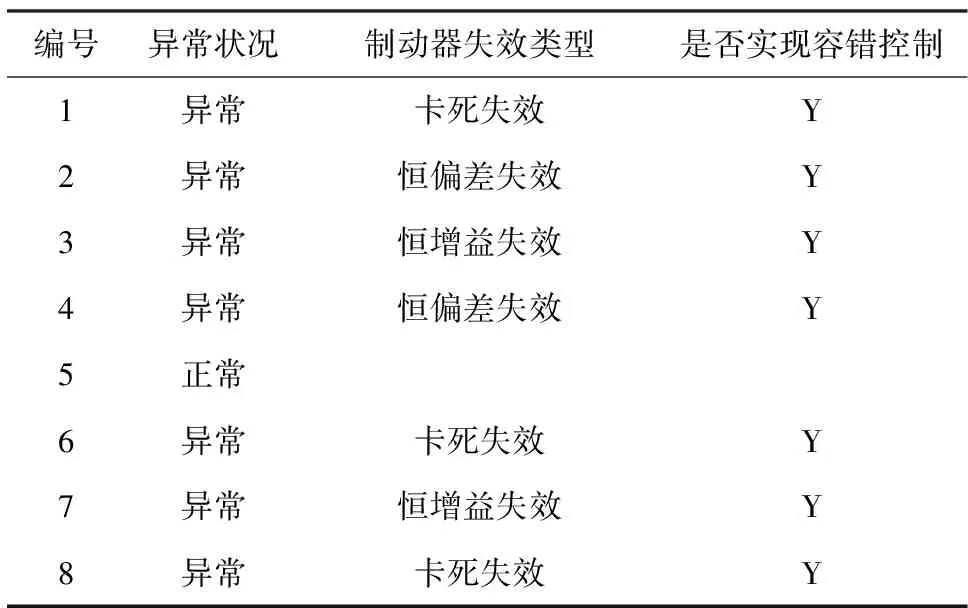
表1 制动器失效容错控制结果
从表1可以看出,应用本文方法可实现对汽车电子机械制动器失效的容错控制,更好保障汽车安全行驶。
为验证本文方法在汽车电子机械制动器失效容错控制方面的优势,绘制不同制动器失效类型下的容错控制效果如图4所示。
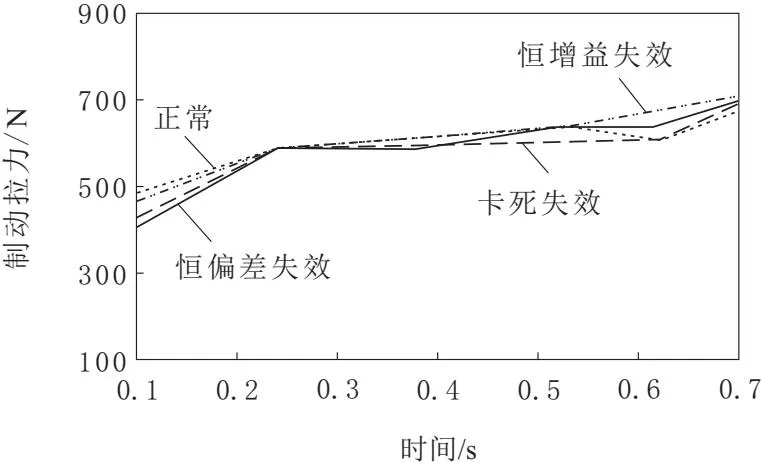
图4 容错控制效果
从图4可以看出,当汽车电子机械制动器出现卡死、恒增益以及恒偏差失效状况时,应用本文方法对汽车电子机械制动器失效容错控制后获得的制动拉力曲线与正常的拉力曲线趋势基本一致。实验证明,本文方法不仅可实现汽车电子机械制动器失效容错控制,并且容错控制效果较好,可更好满足实际工作需要。
应用本文方法进行汽车电子机械制动器失效容错控制时,通过压力以及转速传感器对电流传感器信号进行估计,获得的估计信号与正常信号的对比如图5所示。
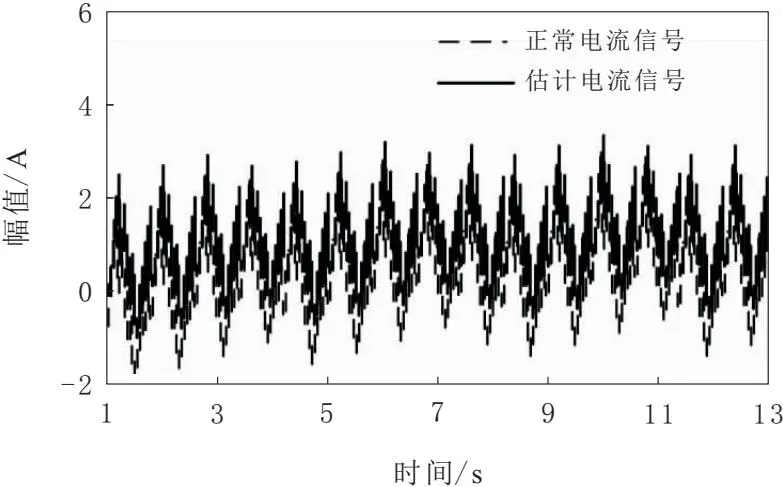
图5 估计信号与正常信号对比
图5中,通过压力以及转速传感器对电流传感器信号进行估计,获得的估计信号波形基本与正常电流传感器信号的波形一致。说明应用本文方法对传感器信号进行估计的准确性较高,将其应用于汽车电子机械制动器失效容错控制工作中,可获得较好的容错控制效果。
分别应用本文方法与文献[4]基于多盘式永磁同步电机协同优化的汽车电子机械制动器失效容错控制方法、文献[5]基于故障估计的汽车电子机械制动器失效容错控制方法对汽车电子机械制动器失效进行容错控制,获得不同实验次数下容错控制失败的次数,结果如表2所示。

表2 容错控制失败次数
分析表2可知,随着实验次数的增加应用文献[4]、文献[5]方法对汽车电子机械制动器失效进行容错控制失败的次数不断增加,而应用本文方法对汽车电子机械制动器失效进行控制失败的次数却一直保持在2次及以下。说明本文方法在汽车电子机械制动器失效容错控制方面更具优势,将其应用于汽车电子机械制动器失效容错控制工作中,可有效降低由于制动器失效导致的交通事故发生的概率。
ROC曲线下的面积可以反映制动器失效行为检测的效果。为验证本文方法在制动器失效行为检测方面的优势,绘制转速传感器、压力传感器、电流传感器采集的数据量为300 GB、600 GB、900 GB下的制动器失效行为检测ROC曲线,具体如图6所示。
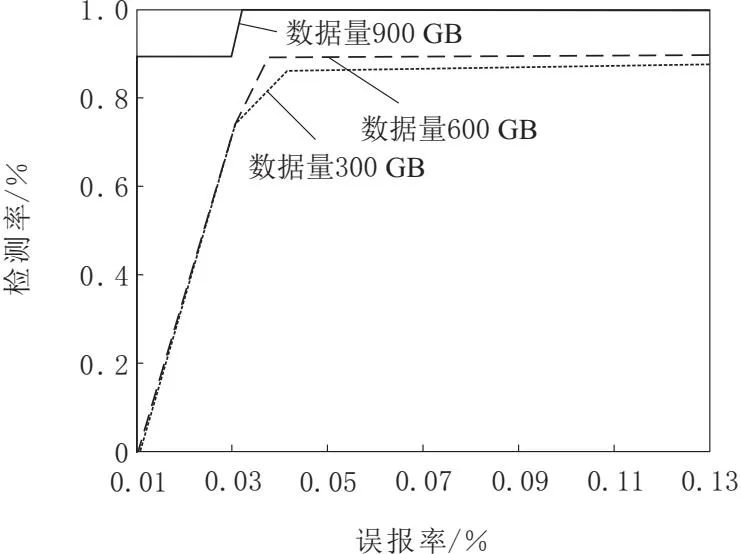
图6 不同数据量下的ROC曲线
分析图6可知,随着转速传感器、压力传感器、电流传感器采集数据量的不断降低,ROC曲线下方的面积也呈现出不断缩小的趋势,但总体来讲缩小的趋势不明显。说明应用本文方法对制动器失效行为进行检测时,即使在传感器数据量较大的条件下,仍然具有高检测率、低误报率,电子机械制动器失效行为检测效果较好。
3 结束语
应用本文方法可实现汽车电子机械制动器失效容错控制,并且控制效果较好。其在电子机械制动器失效容错控制方面的优势具体表现为以下几个方面:
a.当汽车电子机械制动器产生失效时,应用本文方法对汽车电子机械制动器失效容错控制后获得的制动拉力曲线与正常的拉力曲线趋势基本一致,可在制动器失效情况下保障汽车的正常行驶以及停靠。
b.应用本文方法对汽车电子机械制动器失效进行容错控制后,容错控制失败的次数极少。将其应用于实际的汽车电子机械制动器失效容错控制过程中,可有效避免或减少由于制动器失效导致的交通事故的发生,保障驾驶员生命以及财产安全。
