中型无人直升机向心回转机动飞行控制律设计
2024-03-25祖家奎刘佳晖
孙 飞,祖家奎,刘佳晖
(南京航空航天大学自动化学院,江苏 南京 211106)
0 引言
如今,无人直升机被应用于多个领域,包括武装打击、紧急救援、物资运输和森林消防等,是飞行器设计的热点之一[1-2]。在实际任务中,无人直升机必须具备良好的机动性和灵活性,提高避障能力和战场生存能力[3-4]。
直升机的向心回转机动是一种模拟其对地面目标点进行转弯攻击的任务科目,也可作为特技表演项目。向心回转机动可以在适度激烈的悬停转弯中检验无人直升机操纵性能以及控制律设计的合理性。文献[5]基于线性二次调节器设计了自动驾驶仪完成回转前进机动;文献[6]基于平移速率响应,设计一种飞行员仅需侧压操纵杆控制横向地速即可操控直升机完成向心回转运动的控制方法;文献[7]采用导航函数的方法,通过若干导航参数实现向心回转。
本文首先根据《美国军用旋翼航空器飞行品质规范》介绍向心回转指标,定义了各控制量指令;然后设计了中型无人直升机横纵向通道的控制结构和参数,在姿态内回路引入了滑模控制器,从而提升直升机控制的稳定性;最后,通过半物理仿真实验,将实验结果与前文向心回转的标准进行对比。结果表明,本文采取的控制律设计方法和策略能达到向心回转机动的要求,体现了优秀的机动飞行性能和操纵性能。
1 向心回转机动控制策略
本文研究对象为南京航天国器智能装备有限公司研制的某型无人直升机,实物如图1所示。其为常规布局带尾桨的中型直升机,最大起飞重量680 kg,最大飞行速度为180 km/h。

图1 某型无人直升机
悬停低速段的机动飞行能力是无人直升机的突出优势之一,而向心回转机动能够综合考察其在悬停和低速飞行时的控制性能。本文参照《美国军用旋翼航空器飞行品质规范》,即ADS-33E-PRF中规定的向心回转相关要求作为设计标准[8],其参考轨迹如图2所示。
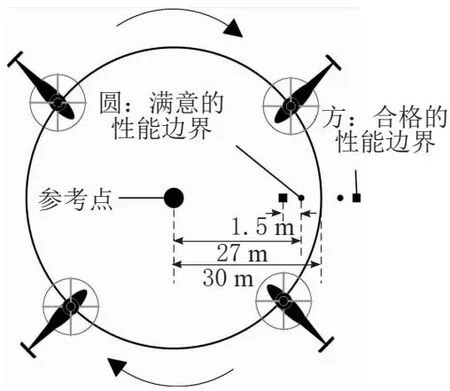
图2 向心回转运动
向心回转机动是模拟近地面转弯攻击的科目,如绕地面某一目标的全方位攻击,ADS-33E-PRF要求直升机选取在距离目标点30 m外某点作为起始点,然后沿半径30 m、圆心为参考点的圆周做机头始终指向目标点的横向运动。
常规的无人直升机控制律设计按不同的控制通道来进行[9],在机动过程中,需要协调无人直升机横向、纵向、航向和高度通道的控制量。结合向心回转机动的要求以及无人直升机控制律设计的经验[10]可知,纵向通道和横向通道要能够快速改变直升机的姿态并保持一定的横纵向速度,偏航通道能稳定保持特定的偏航角速率,高度通道能快速完成升降或是保持不变。
向心回转飞行过程中,直升机在半径为30 m的圆上横向移动,直升机的机头始终指向圆心,在全部侧移过程中保持横向速度基本不变。向心回转主要是依靠横向通道和航向通道的协调操纵实现,保持一定的横向速度,并通过航向通道调整直升机航向。由于耦合原因,纵向通道和横向通道会产生一定的耦合,故需要调整纵向周期变距使直升机前飞速度为0。同时在向心回转的过程中,直升机高度变化较小,从而总距的变化不大。由此得到4个通道的控制分配指令,纵向通道的控制指令为速度保持,即Vcmd=0。
由于向心回转机动是侧飞和航向跟踪运动组成,可以得到横向速度指令Ucmd为
(1)
式中:R为向心回转圆周的半径;tcircle为直升机完成1周所需的时间。
根据性能要求,直升机完成1周的时间在45 s内即达到满意标准,可以推出横向速度指令Ucmd至少为4.1 m/s。向心回转要求直升机飞行全程是高度恒定的,故高度通道采用高度保持,稳定在目标高度H0,本文将在仿真环节设置为3 m。
为了保证直升机在圆周运动时机头始终指向圆心,需要控制直升机航向。以目标点为原点,向西为x轴正方向建立坐标系,直升机当前坐标为(A,B),向心回转直升机坐标如图3所示。

图3 向心回转坐标
若要保持直升机机头指向圆心,则航向指令ψcmd为
(2)
由此,需要保证偏航角速率指令rcmd为
(3)
结合式(1)~式(3),并选择合适的空中悬停点作为该科目起始点,即可完成向心回转机动。
2 通道控制律设计
2.1 横纵向通道控制律设计
直升机的纵向通道、横向通道具有相类似的幅频特性和相频特性,因此,可以考虑使用一致的控制结构[11]。
本文拟采用内外环串联的总体控制结构,其中内回路为基于滑模控制的角速率/姿态角反馈的增稳回路,外回路为基于PID的速度和位置的跟踪控制回路,具体设计过程如下。
2.1.1 基于滑模控制的内回路设计
在非线性控制方法中,变结构控制能使系统按设定的“滑动模态”有目的地运动,所以又称此种非线性控制方法为滑动模态控制,即滑模变结构控制[12]。

图4 超曲面上3类点特性
状态空间被如上的超曲面分成上、下2部分,而切换面s=0。在切换面上有且仅有3种运动形式,如下所述:
a.通常点A,系统运动到切换面时穿越此点。
b.起始点B,系统运动到切换面时,从切换面两边分开。
c.终止点C,系统运动到切换面时,从切换面两边趋向于该点。
在一个系统中,若在切换面上某一区域内所有的点都是终止点,那么此区域可以称为滑动模态区,简称为滑模区,系统在滑模区中的运动为滑模运动。设计滑模控制需要系统存在滑模区,并且滑动运动稳定。
针对控制律设计的跟踪问题,通常设计滑模函数s(t)为
(4)

令滑模函数s(t)=0,得到
(5)
在时域0~t内积分,可知
(6)
进一步推导得
e(t)=e(0)·e-ct
(7)


图5 滑模控制系统跟踪误差运动轨迹
实现滑模控制的前提是找到滑模运动的存在,当系统本身工作点不在滑模面上时,控制器首要的任务是找到趋近运动,使得系统向滑模面运动。定义Lyapunov函数为
(8)
则Lyapunov函数的衰减特性为
(9)
故在连续系统中,滑模运动的到达条件通常为
(10)
滑模变结构的运动由滑模运动和趋近运动2部分组成,而滑模运动可达性条件仅规定了系统在状态空间任意点必然在有限时间内到达滑模面,并未规定运动形式。滑模段的运动品质可由滑模方程来决定,而趋近运动的运动品质可以通过设计趋近律来改善。设计趋近律为
(11)
此种趋近律为等速趋近律,其中ε为系统的运动点趋近切换面s=0的速率。sgn(s)是关于s的符号函数,当s>0时,s(t)=-tε;当s<0时,s(t)=tε;运动到切换面时,s(t)=0,可计算得到系统由初始状态到达切换面所需要的时间为s(0)/ε。则趋近运动的时间由ε决定,ε越大,趋近速度越快,但过快的趋近速度会使得系统到达切换面时的速度较大,产生的抖振也较大,故需要合理选择ε的大小。
对于直升机纵向通道内环回路,其跟踪误差为
e(t)=θ(t)-θd(t)
(12)
式中:θ(t)为俯仰角反馈;θd(t)为俯仰角指令。
跟踪误差的导数为
(13)
由于直升机俯仰角的导数即为俯仰角速率,且要求直升机目标姿态稳定,目标角速率为0,故式(13)简化为
(14)
设计滑模函数为
(15)
通过推导可得
(16)
满足滑模运动的可达性条件。
在实际直升机控制律设计中,使用符号函数sgn(s)来进行瞬时的控制切换很难实现,并且瞬时的控制切换会导致高频震颤。因此,引入一种饱和函数来实现滑模运动[14],即用sat(s)来代替符号函数sgn(s),从而缓解震颤。sat(s)定义为
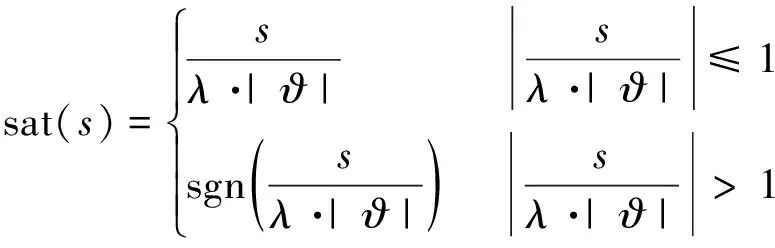
(17)
当渐进夹角增大时,sat(s)的斜率减小,使得系统的运动轨迹平滑进入滑模面。
以纵向通道的内回路设计过程为例,sat(s)代指滑模控制模块,δe为纵向变距输出,θcmd为内环俯仰角指令,控制结构如图6所示。

图6 纵向通道滑模控制内回路控制
控制结构中保留了俯仰角速率反馈,用于提高内环控制系统阻尼,抑制纵向通道的快速振荡,增强稳定性。
为了突出此控制方法的优势,本文将滑模控制内回路控制的效果与PID控制的效果进行比较。PID控制,即比例积分微分控制,该方法能在模型精度要求低的情况下较为稳定地控制无人直升机4个通道的输出,是工程实践中易于使用的方法[15]。
对内回路施加阶跃信号,相同条件下PID控制的响应曲线和滑模控制下的响应曲线如图7所示。
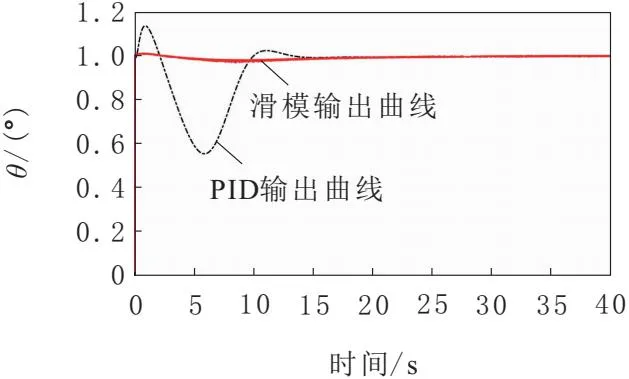
图7 滑模控制和PID控制响应对比
由图7可以得到,滑模控制和PID控制2种控制方式稳态误差都很小,滑模控制下的超调量远小于PID控制,且滑模控制下的响应速度要明显优于PID控制,能够在1 s内实现快速响应,到达滑模面,且滑模运动稳定无震荡。
2.1.2 外回路设计
纵向通道的外环控制律是在内环控制的基础上,串联以速度和位置控制结构。外环的控制律设计主要为了实现无人直升机对位置指令的跟踪与保持,如图8所示。

图8 纵向通道外环控制
控制律表达式为
(18)
式中:Xcmd为纵向位置指令;Vcmd为纵向速度指令;VX为纵向速度。
2.2 航向/高度控制律设计
此型无人直升机由尾桨力矩抵消主旋翼反扭距,并控制直升机的航向,其控制结构如图9所示。

图9 航向通道控制
对应控制律表达式为
(19)
式中:ψcmd为航向角指令;rcmd为偏航角速率指令;ψ为航向角;r为偏航角速率反馈;δrud为尾桨距输出值。
高度通道的控制律设计与航向通道相类似,在此不做赘述。
3 仿真验证
3.1 仿真系统
对本文所设计的控制方法进行半物理仿真,使用的半物理仿真系统如图10所示。
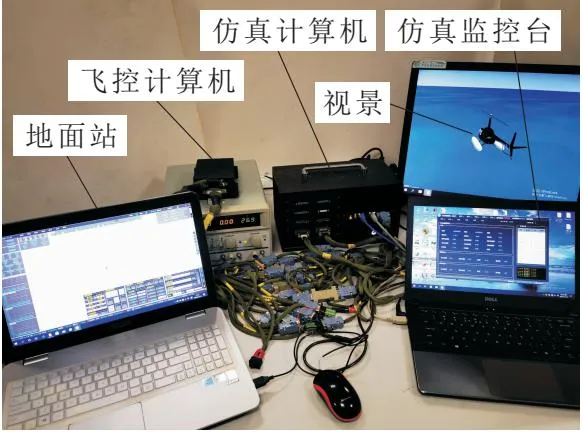
图10 半物理仿真系统
该仿真系统其主要由2部分组成,包括飞控计算机、仿真计算机在内的硬件设备,以及包括机载飞控程序/仿真程序、地面站、仿真监控台和xplane视景软件在内的软件程序。
3.2 仿真结果
在半物理仿真系统中进行向心回转机动仿真,得到其三维轨迹如图11所示,无人直升机飞行数据如图12所示。将本文结果与ADS-33E-PRF指标、文献[6]中辅助有人驾驶直升机向心回转机动方法的结果对比如表1所示。由表1可知,除完成1周的时间合格,其余指标都达到满意的标准。
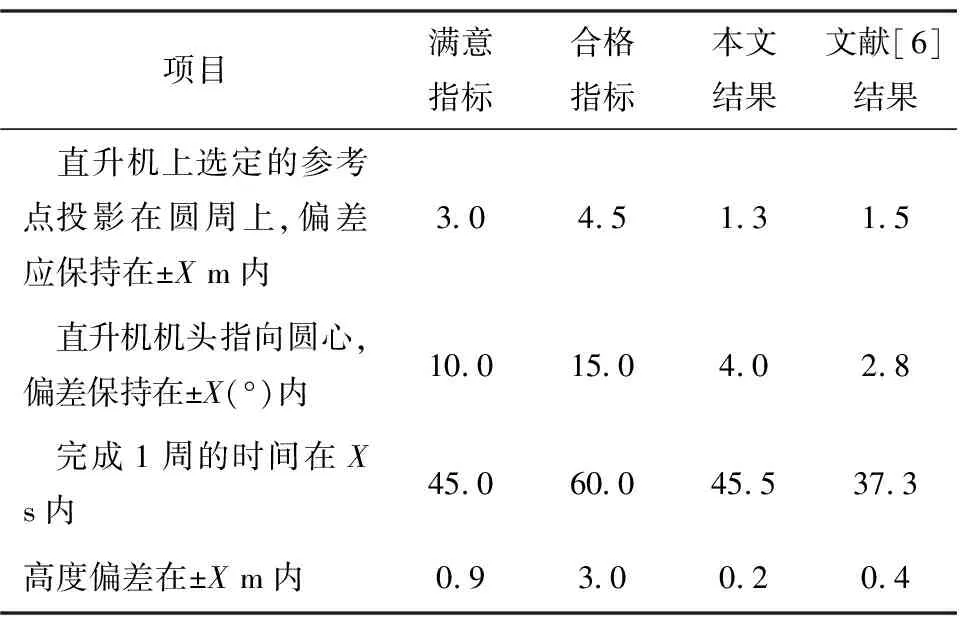
表1 向心回转机动性能对比
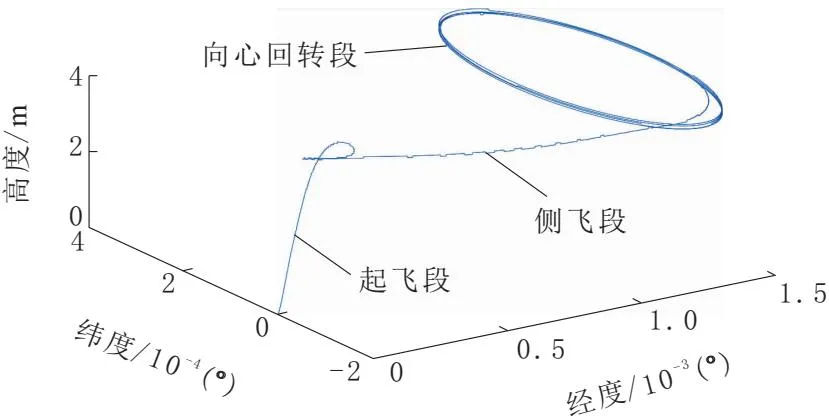
图11 向心回转机动三维轨迹

图12 飞行数据曲线
4 结束语
向心回转机动能检验直升机的操纵性能和控制的稳定性。本文基于ADS-33E-PRF中向心回转机动的标准,计算出机动过程中的速度、姿态角和高度等控制指令。在中型无人直升机横纵向控制通道中引入了滑模控制器,并与常规PID控制器的控制效果进行比较,提升了姿态增稳回路的稳定性和响应速度。在半物理仿真系统中对本文设计的控制律进行仿真,本文所设计的无人直升机控制结构和方法都较为满意地完成向心回转机动。由仿真对比可知,各通道的控制效果稳定、快速,本文方法能提升无人直升机飞行的稳定性和机动性能。但此方法完成1圈的时间略超过满意的标准,放宽一定的快速性指标,以提升无人直升机机动过程中的稳定性,在后续研究中可以进一步完善。