基于广域测量的汽轮发电机励磁反步控制方法
2024-03-25卢建刚曾凯文李世明龙建平李德忠
卢建刚,戴 月,曾凯文,李世明,龙建平,李德忠
(1.广东电网电力调度控制中心,广东 广州 510600;2.湖南大唐先一科技有限公司,湖南 长沙 410007)
0 引言
电力生产在国民经济中占据主要地位,电力需求量日益增长,为快速扩展电力系统容量[1],通过汽轮发电与水利发电等各类型电源,组建容量较大的电力系统,但该电力系统的不确定度较高[2]。发电机励磁反步控制属于提升电力系统稳定性的关键手段,其中各类型的发电机中,对于汽轮发电机励磁反步控制的研究较少,为此需研究汽轮发电机励磁反步控制方法,为提升电力系统稳定性提供新思路[3-4]。
余洋等[5]通过双线性聚合温控负荷模型与发电机励磁模型,构造发电机励磁协调控制数学模型,通过反推控制原理,针对协调控制数学模型,设计发电机励磁协调控制策略,依据双曲正切原理,研究励磁电压微分估计方法,减少控制策略计算量,该方法可有效跟踪发电机的各被控量,完成发电机励磁控制;荆立坤等[6]设计发电机自适应励磁控制器,利用高增益扰动观测器,估计控制器内的扰动,利用改进樽海鞘群算法优化控制器参数,该方法可有效控制发电机励磁,令发电机受到扰动后,迅速恢复稳定。但这2种方法均无法获取发电机的运行数据,影响发电机励磁控制的实时性。
广域测量系统是以相量测量单元为底层,完成数据实时采集的动态监测系统[7]。为此,提出基于广域测量的汽轮发电机励磁反步控制方法,提升励磁反步控制效果。
1 汽轮发电机励磁反步控制方法
1.1 基于WAMS的控制原理
汽轮发电机结构如图1所示。

图1 汽轮发电机结构
根据汽轮发电机结构,设计励磁反步控制原理。广域测量系统(wide area measurement system,WAMS)包含3部分,分别是同步相量测量单元(phasor measurement unit,PMU)、通信网络与监测中心。基于WAMS的汽轮发电机励磁反步控制原理如图2所示。
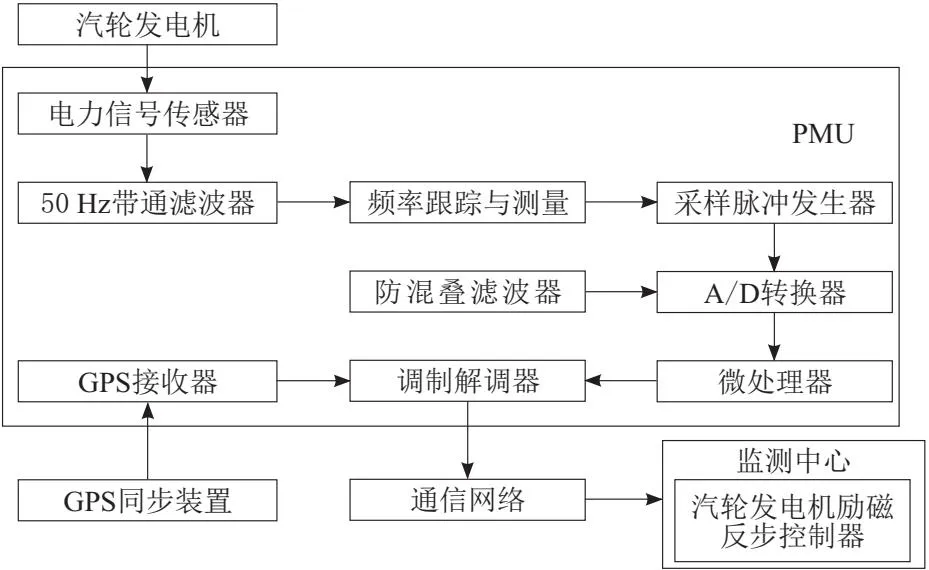
图2 反步控制原理
PMU首先通过GPS提供的同步时间信号,对测量的汽轮发电机运行数据进行加时标操作,实现汽轮发电机运行数据实时测量;再利用通信网络传输实时测量的汽轮机发电机运行数据至监测中心,监测中心依据发电机运行数据,建立汽轮发电机励磁控制模型;最后针对该模型,利用反步法,设计汽轮发电机励磁反步控制器,通过径向基函数神经网络的参数逼近功能,估计控制器内的扰动,对其进行补偿,提升励磁反步控制效果。WAMS可实时得到汽轮发电机的广域动态信息,从汽轮发电机的全局角度,对其进行监测与励磁反步控制,提升汽轮发电机运行稳定性。
1.2 基于广域测量的汽轮发电机运行数据采集与预处理
WAMS中PMU内GPS接收器负责给出1 PPS的时间标签信号;经过带通滤波器实时跟踪测量电力信号传感器采集的汽轮发电机运行数据;经由采样脉冲发生器,分成数列脉冲序列,令其符合时间与频率的同步性,并启动A/D转换器,实施采集的汽轮发电机运行数据模数转换[8];通过防混叠滤波器使汽轮发电机运行数据频域混叠情况不再发生;通过微处理器求解模数转换后的汽轮发电机运行数据的相量值,采用对称分量法获取汽轮发电机相量值的正序分量。
通过相量描绘汽轮发电机电压与电流等运行数据的理想信号,测量相量必须测量汽轮发电机幅值与相角,随机2个相量在相同时间下,测量获取的相角差是两地功角。
利用旋转相量表示法描绘汽轮发电机的相量,随着时间延长,汽轮发电机相量的相位角呈旋转变化,且旋转具备一定的周期性[9-10],在随机时刻t时,汽轮发电机相量为
(1)
式中:ω为汽轮发电机转子角速度;X为汽轮发电机运行数据内的有效信号值;j为虚数;φ为汽轮发电机初相角。
通过旋转相量表示法可获取PMU测量得到的汽轮发电机相量,汽轮发电机相量内包含电流、励磁电压与转子角速度等运行数据。
为令PMU测量的汽轮发电机运行数据可用于后续励磁反步控制中,需对其进行预处理,具体步骤如下:
a.汽轮发电机部分运行数据变更成标幺值,PMU测量获取的汽轮发电机运行数据都是有名值,在励磁反步控制中,需要部分数据是标幺值[11]。为此需按照汽轮发电机额定容量、额定电压等参数,获取汽轮发电机的电压、电流基值,将其变更成标幺值形式。
b.求解角度。汽轮发电机励磁反步控制过程中,需对定子电压与电流展开Park变换[12],计算d、q和x、y坐标间空间角度,前者为转子位置,后者为定子绕组位置。令汽轮发电机功角是δ,功率因数角是ψ,对汽轮发电机的机端电压U1与机端电流I1展开Park变换,即
(2)
式中:ud、uq分别为d轴、q轴的汽轮发电机电压;id、iq分别为d轴、q轴的汽轮发电机电流。
1.3 汽轮发电机励磁控制数学模型
(3)


(4)

通过建立汽轮发电机励磁控制数学模型,得到励磁反步控制的控制变量,即励磁绕组电压v=uf。
1.4 汽轮发电机励磁反步控制器设计


o=e2+ξe1
(5)

(6)
(7)
若F2(X2)为准确可知的,那么选取合理的汽轮发电机励磁反步控制器v′,可令ρ达到合理的性能指标。
F1(X1)与F2(X2)不符合线性参数条件,为令汽轮发电机励磁反步控制器符合线性参数条件,需利用RBF神经网络逼近F1(X1)与F2(X2)。
以高斯基函数φ为RBF网络函数,令权值是W,误差是ε,RBF网络算法为
(8)
式中:z为RBF网络输入,即汽轮发电机运行参数;j′为节点编号;cj′、bj′为φ的中心向量、基宽;h=[hj′]为φ的输出;y为RBF输出,即F1(X1)与F2(X2)的逼近结果。
2 实验分析
2.1 参数设置
为了验证本文提出的基于广域测量的汽轮发电机励磁反步控制方法在实际应用中的有效性,以图1的汽轮发电机为实验对象,进行仿真实验分析。该汽轮发电机的参数设置如表1所示。
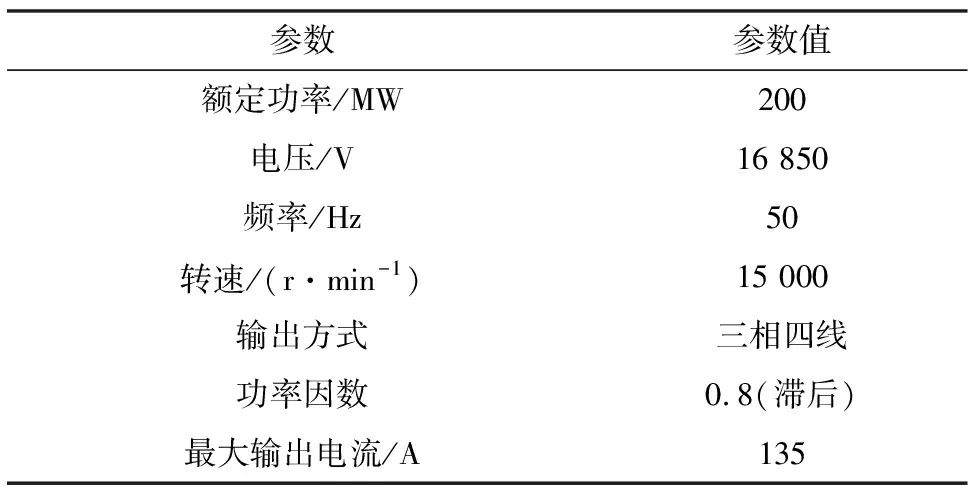
表1 汽轮发电机的参数设置
该汽轮发电机通过双回输电线,线路电压等级是220 kV,线路长200 km。利用本文方法在有功调节、无功调节与暂态过程3种应用场景下反步控制该汽轮发电机励磁,应用各场景时分别设置100 ms、400 ms、800 ms的恒定时滞,故障开始时间均为1 s。
2.2 汽轮发电机电流采集结果
利用本文方法采集不同应用场景时该汽轮发电机的运行参数,以有功调节应用场景内汽轮发电机的d轴、q轴电流为例,汽轮发电机d轴、q轴电流如图3所示。
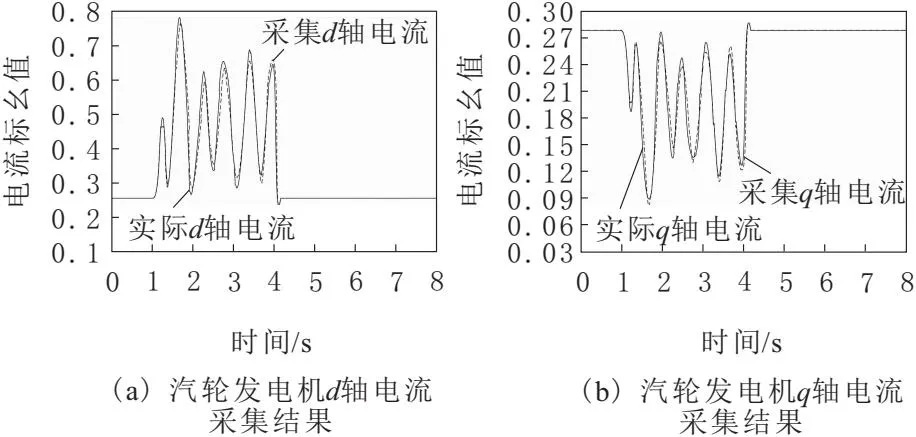
图3 汽轮发电机d轴、q轴电流采集结果
根据图3可知,本文方法可有效采集汽轮发电机d轴、q轴电流,且采集的电流与实际电流非常接近,说明本文方法进行汽轮发电机d轴、q轴电流采集的精度较高。实验证明,本文方法可精准采集汽轮发电机运行数据。
2.3 汽轮发电机励磁反步控制结果
根据《电力工程电气设计规范》设置功角最高超调量标准为低于70°,转子角速度最高超调量标准为低于2 rad/s,q轴暂态电势最高超调量标准为低于0.02。利用本文方法反步控制3种应用场景时,汽轮发电机励磁反步控制后汽轮发电机功角、转子角速度、d轴暂态电势变化情况如图4所示。
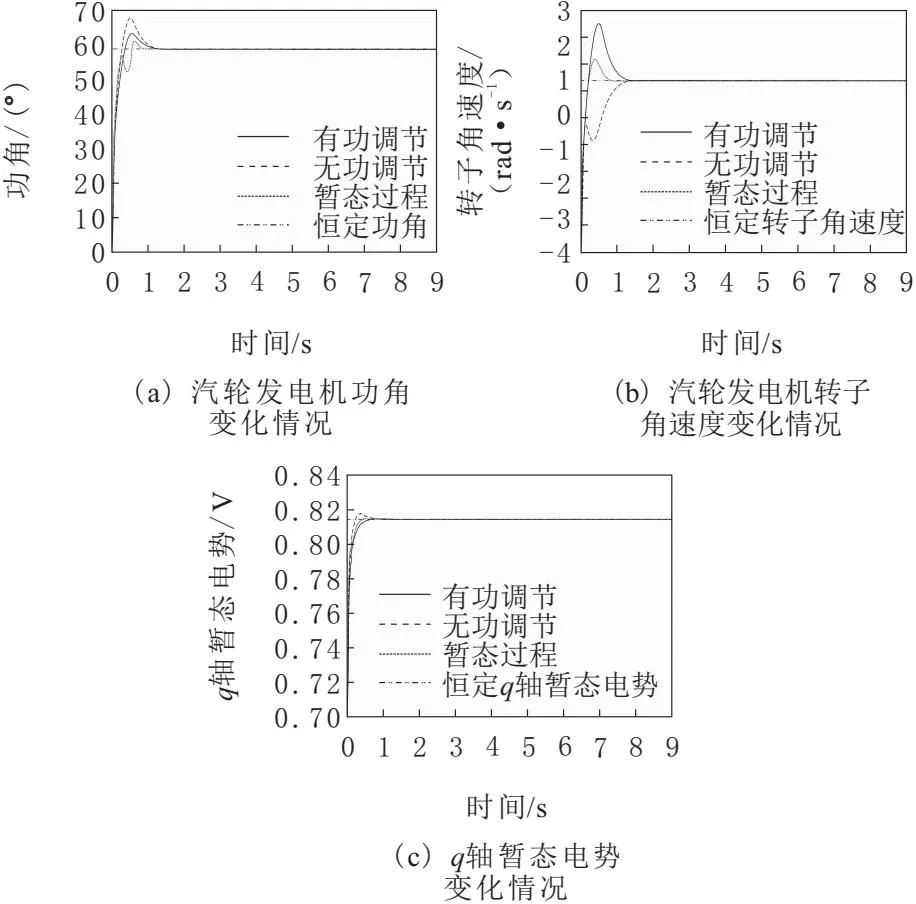
图4 3种应用场景时汽轮发电机励磁反步控制结果
根据图4可知,3种应用场景时,本文方法均可有效反步控制汽轮发电机励磁。3种应用场景下,经过本文方法励磁反步控制后汽轮发电机功角最高超调量均低于70°,完成反步控制时间均大概控制在2 s以内;汽轮发电机转子角速度最高超调量均低于2 rad/s,完成反步控制时间也均大概控制在2 s以内;汽轮机q轴暂态电势最高超调量均低于0.02 V,完成反步控制时间均大概控制在1 s以内。综合分析可知,不同应用场景时,本文方法可有效反步控制励磁,令功角、转子角速度及q轴暂态电势迅速恢复至恒定值,反步控制超调量较小,具备较优的汽轮发电机励磁反步控制效果。
2.4 励磁反步控制前后电网稳定情况
分析不同恒定时滞时,各应用场景下应用本文方法励磁反步控制前后该电网的稳定情况,分析结果如表2所示。
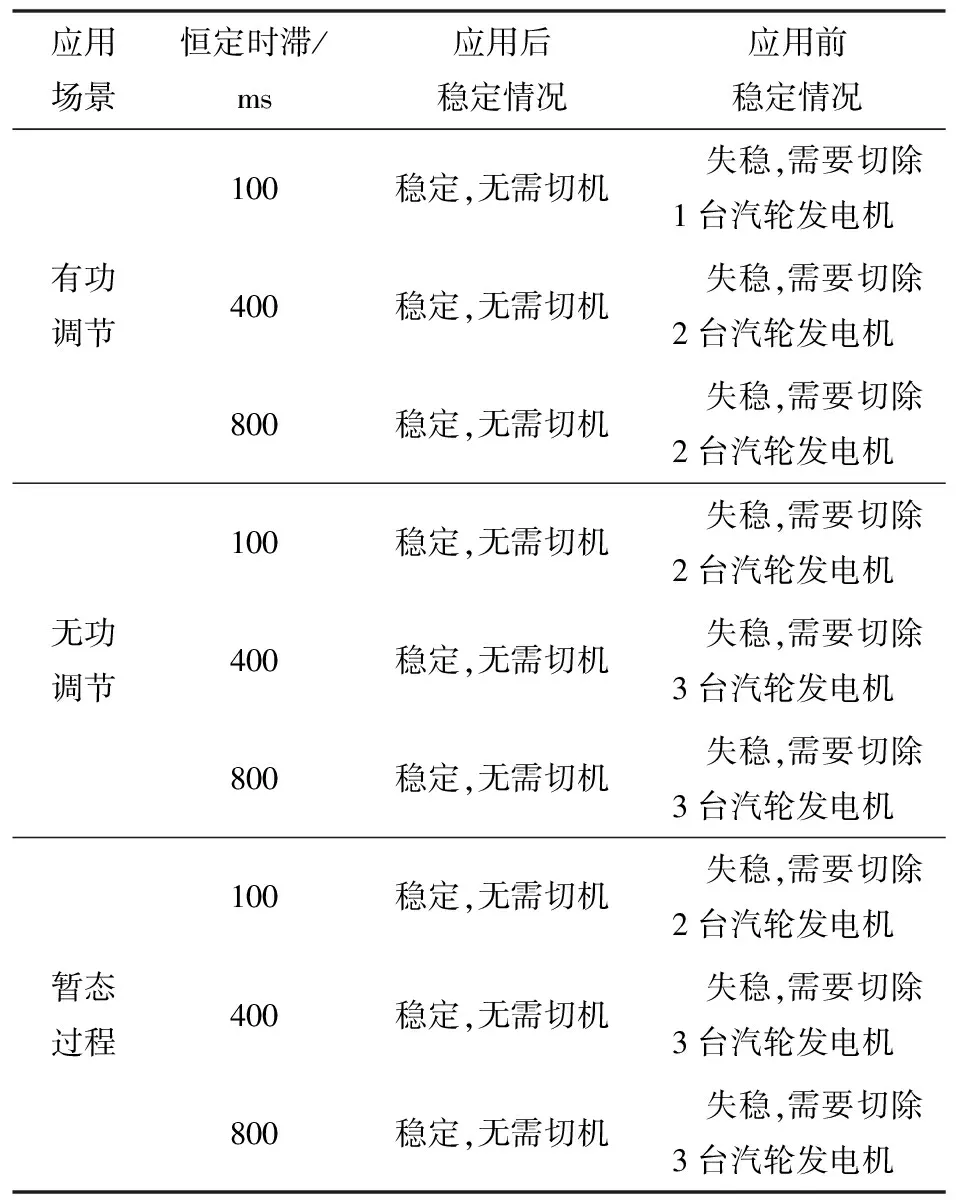
表2 应用本文方法励磁反步控制前后电网稳定情况
根据表2可知,3种应用场景下,不同恒定时滞时,应用本文方法励磁反步控制后,该电网的稳定性均较优,且出现故障时均无需切机,有效降低故障后电网的切机量;应用本文方法前,汽轮发电机发生故障后,电网出现失稳情况,随着恒定时滞的延长,切机数量也随之增长。实验证明,应用本文方法后,可确保电网运行稳定性,降低电网切机量。
3 结束语
汽轮发电机励磁反步控制属于提升电力系统有功与无功响应的关键方法,有效反步控制汽轮发电机励磁,可提升电力系统运行的稳定性。为此研究基于广域测量的汽轮发电机励磁反步控制方法,通过广域测量系统采集汽轮发电机运行数据,并依据反步法设计汽轮发电机励磁反步控制器进行反步控制,通过实验结果可知,本文方法能够有效反步控制汽轮发电机励磁,令发电机功角与转子角速度等迅速恢复至稳定状态。
