四轮转向干预下电动助力转向控制策略研究
2024-03-25许艳刘阳毅
许艳,刘阳毅
(湖南大学 机械与运载工程学院,湖南 长沙 410082)
车辆的操纵稳定性一直备受人们的关注,相比 于传统的前轮转向技术(Front-Wheel Steering,FWS),四轮转向(Four-Wheel Steering,4WS)技术能在很大程度上提高车辆的操纵稳定性,因而成为近年来研究的焦点.四轮转向能使车辆转向时的侧偏角为零,减小了车辆发生侧滑的可能性,提高了车辆的稳定性.低速时能减小车辆转弯半径,提高车辆的机动性;高速时能加快车辆横摆角速度和侧向加速度响应,提高瞬态性能[1-2].
针对4WS 车辆的操纵稳定性问题,刘刚等[3]利用传递函数对比分析了前馈和反馈两种典型控制算法的稳态特性和瞬态特性,发现二者稳态特性一致,但反馈型控制算法提高了4WS 车辆的瞬态响应品质.张庭芳等[4]基于单点预瞄驾驶员模型,提出了改进型滑模控制算法,在双移线工况下进行算法的验证,结果表明所提出的控制算法提高了车辆的稳定性且面对侧向干扰时具有较强的鲁棒性.屈翔等[5]针对4WS 车辆提出一种主动转向反馈控制策略,在双移线和角阶跃工况下将质心侧偏角控制在0 值附近,有效提高汽车的操纵稳定性.刘瑞峰等[6]提出一种基于数据融合算法的车辆转角控制分配策略,上层为后轮转角控制,下层为左右车轮转角分配.所提出的融合控制策略在不同工况下均改善了车辆操纵稳定性.
以上研究都是针对车辆本身的操稳性,忽略了驾驶员在驾驶4WS 车辆时的习惯变化.4WS 后轮转向会改变车辆的横摆角速度和质心侧偏角响应,从而改变驾驶员操纵转向盘力矩,对电动助力转向(Electric Power Steering,EPS)系统的助力策略产生影响.目前,国内外对EPS 系统的研究主要集中于FWS 车辆[7-9],所提出的助力策略与4WS 车辆不匹配.本文在MATLAB/Sminulink 环境下进行车辆、EPS建模,在研究了FWS以及典型的两种4WS(开环前馈型和闭环反馈型4WS)车辆转向特性的基础上,提出了EPS 的助力修正控制策略,在阶跃工况下进行了算法的验证,仿真结果表明所提出的修正控制策略基本消除后轮转向对转向盘力矩的影响.
1 系统模型
1.1 EPS数学模型
EPS 是在传统的机械转向结构上添加了一套电动机助力装置,用来帮助驾驶员转动方向盘,通过电子控制单元(ECU)中设置的助力曲线,确定助力转矩的值.EPS 的总体结构如图1 所示.为建立转向系统的数学模型,对转向系统做一些合理简化[10].根据刚体定轴转动定律,转向系统动力学方程建立如下.

图1 EPS总体结构图Fig.1 Structure of EPS
各符号含义见表1.
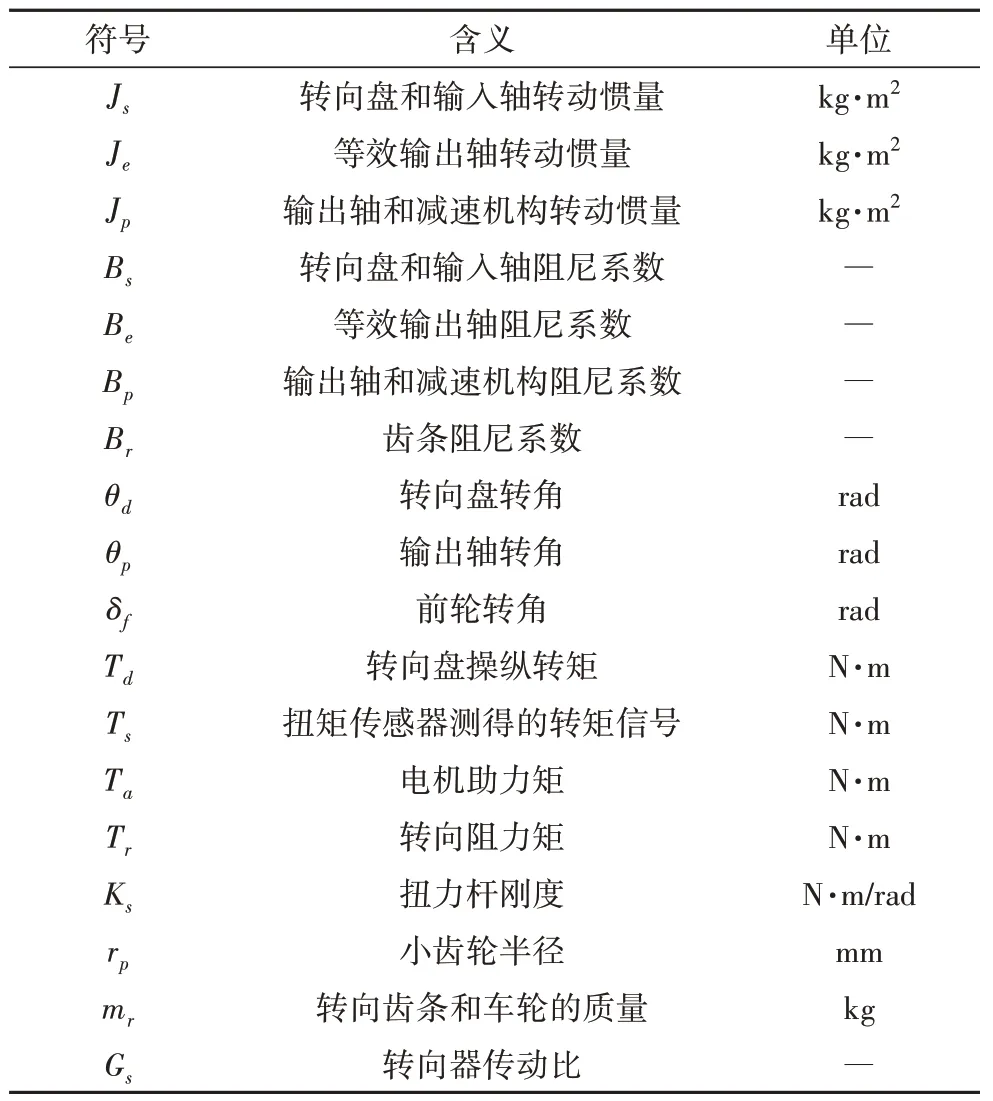
表1 转向系统符号及含义Tab.1 Symbols and meanings of steering system
助力电机采用直流电机,其模型为
各符号含义见表2.

表2 电机模型符号及含义Tab.2 Symbols and meanings of motor model
1.2 车辆模型
传统四轮转向车辆采用机械或者液压传动来驱动后轮转向,而近年来多用后轴桥壳内电动机驱动,本文亦采用电机驱动的方式.如图2 所示,4WS 车辆在低速时后轮转角与前轮反向,而高速时后轮转角与前轮同向,这样保证了车辆质心侧偏角为0.车辆数学模型采用线性二自由度模型[11],其公式如下:
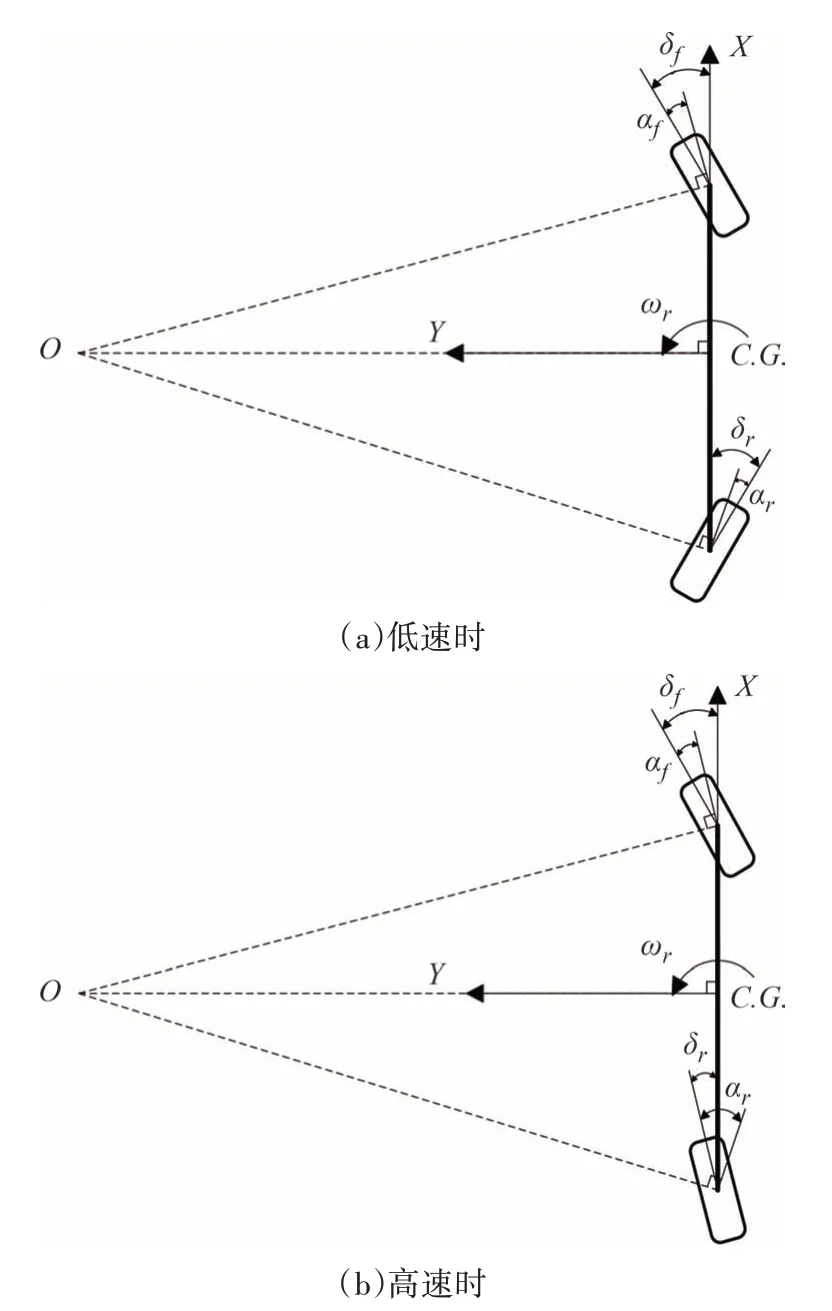
图2 四轮转向车辆模型Fig.2 4WS vehicle model
式中:Fy为y轴方向的合外力;Fyf、Fyr分别为前、后轮侧向力;Mz为绕z轴方向的合外力矩;mv为整车质量;u为车辆纵向速度;v为车辆侧向速度;r为横摆角速度;Iz为绕z轴的转动惯量;a、b分别为车辆质心至前、后轴距离;kf、kr分别为前、后轴侧偏刚度;αf、αr分别为前、后轮侧偏角.
前、后轮侧偏角可由下式算出.
式中:δr为后轮转角;β为车辆质心侧偏角.车辆转向时的转向阻力矩可由下式算出.
式中:tm为机械拖距;tp为气体拖距.转向阻力矩等效到转向输出轴后得
2 EPS助力修正控制策略
2.1 FWS车辆传递函数计算
为了设计EPS 助力修正控制器,我们需要分别知道FWS 和4WS 车辆中前轮转角到转向阻力矩的传递函数.FWS 车辆二自由度模型与式(10)、式(11)一样,只是后轮侧偏角的计算公式变为:
把式(10)~式(12)和式(16)进行拉氏变换,可得FWS车辆从前轮转角到横摆角速度和质心侧偏角响应的传递函数分别为
下面我们计算4WS车辆前轮转角到转向阻力矩的传递函数.4WS 车辆后轮转角的控制策略有很多种,这里只选取具有代表性的两种控制策略进行研究,这两种控制策略分别为开环前馈型控制和闭环横摆角速度反馈型控制.
2.2 前馈型4WS车辆传递函数计算
前馈型4WS 车辆后轮转角控制策略由Sano等[12]提出,控制目的在于使转向时车辆的稳态质心侧偏角为0.后轮转角可以表示为前轮转角的函数.
式中:k为后轮转角增益.
把式(10)~式(13)和式(20)进行拉氏变换,得到前馈型4WS车辆从前轮转角到横摆角速度和质心侧偏角响应的传递函数分别为:
把式(21)、式(22)代入式(14)可以算出从前轮转角到转向阻力矩的传递函数为
2.3 反馈型4WS车辆传递函数计算
由Whitehead 提出的反馈型4WS 车辆后轮转角控制策略可以使车辆的质心侧偏角在瞬态和稳态时均为0[13].后轮转角中加入了横摆角速度反馈,改变了系统的特征方程,提高了其稳定性.在式(10)~ 式(13)中,令且β=0,可得后轮转角应该满足
式中:k1=-kf/kr;k2=mvu/kr+(akf-bkr)/(kru).把式(10)~式(13)和式(25)进行拉氏变换,得到反馈型4WS车辆从前轮转角到横摆角速度和质心侧偏角响应的传递函数分别为:
把式(26)、式(27)代入式(14)可以算出从前轮转角到转向阻力矩的传递函数为:
2.4 EPS控制策略
相对于传统的FWS 车辆,4WS 车辆因为两后轮也提供转向角,从而改变了传统的车辆响应(横摆角速度和质心侧偏角).具体而言,低速时后轮转角与前轮转角相反,加剧了车辆绕质心的转动,增大了横摆角速度响应;而同时使车辆质心侧偏角变为0,与FWS 车辆相比有所减小(低速时FWS 车辆质心侧偏角为正数).高速时后轮转角与前轮转角相同,减少了车辆绕质心的转动,从而减小了横摆角速度响应;同时也使车辆质心侧偏角变为0,与FWS 车辆相比有所增大(高速时FWS 车辆质心侧偏角为负数).由式(12)~式(15)可知,车辆响应的变化使得前轮侧偏角也发生变化,从而转向阻力矩也会相应变化.转向阻力矩的变化打破了原有EPS 系统力的平衡,使驾驶员操纵转向盘的力矩也相应改变.
下面定性分析4WS 对EPS 的干预.定义ΔMr为稳态时相同前轮转角下4WS 转向阻力矩与FWS 转向阻力矩的差值,则
令s=0,由式(12)、式(17)、式(18)、式(21)、式(22)可知,对于前馈型4WS有
即当k>0(低速)时,ΔMr>0,4WS 转向阻力矩大于FWS,因此驾驶员操纵转向盘的力矩会增大.当k<0(高速)时,ΔMr<0,驾驶员操纵转向盘的力矩会减小.同理,对于反馈型4WS 也有类似的结论.这种力矩变化不利于车辆的操纵,因而需要对EPS 的助力曲线进行修正,以保持原有的EPS助力特性.
4WS 车辆的后轮转向后,在相同前轮转角下转向阻力矩发生了变化,这部分变化量等效到转向系后表现为驾驶员操纵转向盘力矩的变化.由式(19)、式(24)、式(28)可知,等效到转向系的转向阻力矩变化量为:
式中:Ic为修正电流为由EPS 助力曲线得出的基本助力电流;Ii为基本助力电流和修正电流叠加后的电机理想电流,通过电机闭环控制使电机实际电流I和电机理想电流Ii一致.
EPS助力修正控制框图如图3所示.低速时4WS车辆转向阻力矩大于FWS 车辆转向阻力矩,修正电流为正,此时EPS的助力效果加强;而高速时4WS车辆转向阻力矩小于FWS 车辆转向阻力矩,修正电流为负,此时EPS 的助力效果减弱,从而使驾驶员操纵转向盘的力矩保持不变.
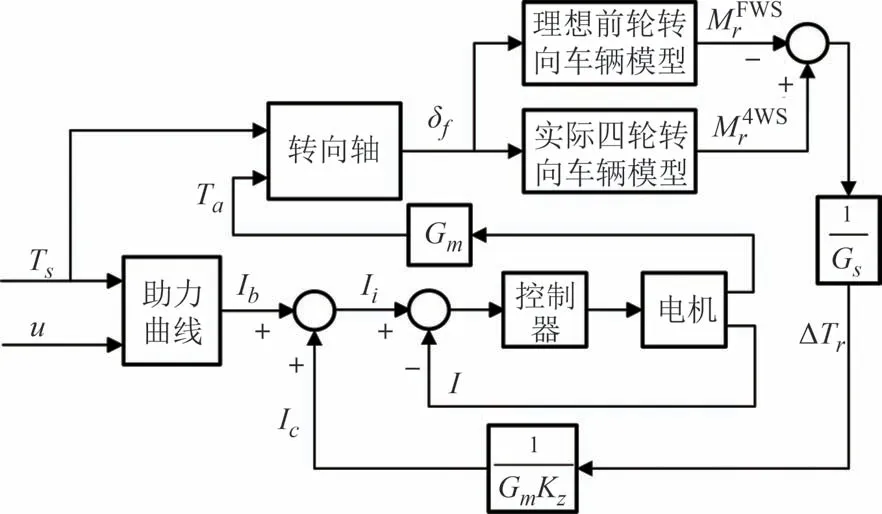
图3 EPS助力修正控制框图Fig.3 Block diagram of EPS correction control strategy
3 仿真分析
在MATLAB/Simulink软件中建立EPS模型、传统FWS 整车模型、前馈型4WS 整车模型和反馈型4WS整车模型,分别在低速(30 km/h、40 km/h)和高速(80 km/h、90 km/h)两种工况下对模型仿真,仿真车辆参数见表3.为了使车辆侧向加速度保持在线性区内,设定低速时转向盘转角为90°斜坡阶跃输入,高速时转向盘转角为22.5°斜坡阶跃输入,如图4所示.

表3 车辆参数Tab.3 Vehicle parameters

图4 转向盘转角输入信号Fig.4 Steering wheel input
由图5 可知,在不加入EPS 助力修正控制时,两种典型控制策略下的4WS车辆的转向盘力矩变化趋势几乎一致,稳态值相同,瞬态时略有差别,相较于FWS车辆,驾驶员操纵转向盘力矩发生明显变化:低速时转向盘力矩增大,驾驶员转向负担进一步加重;高速时转向盘力矩减小,对于操纵稳定性而言是不利的.造成转向盘力矩变化的原因是四轮转向使车辆横摆角速度和质心侧偏角发生变化,这在上一节已经详细阐述.图6和图7分别表示车辆横摆角速度和质心侧偏角的变化.低速时4WS 车辆横摆角速度变大,高速时4WS车辆横摆角速度变小.这是因为低速时后轮与前轮逆相位转向,高速时后轮与前轮同相位转向.不论低速还是高速,4WS车辆的质心侧偏角相较于FWS 车辆都更接近于0°,稳定性更好,其中反馈型控制策略4WS车辆质心侧偏角始终为0°.
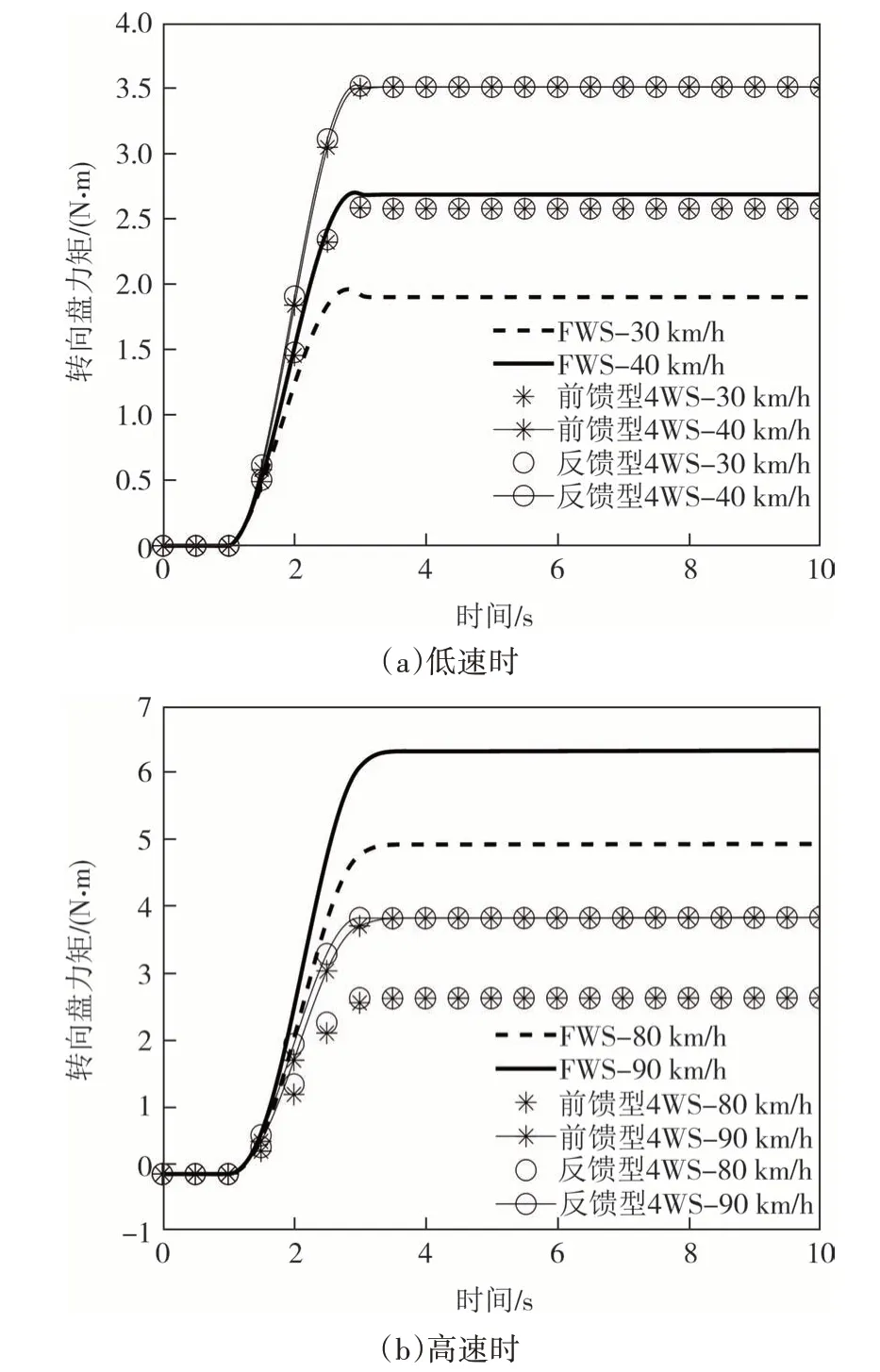
图5 未加入修正控制时转向盘力矩对比图Fig.5 Steering torque comparison without correction control
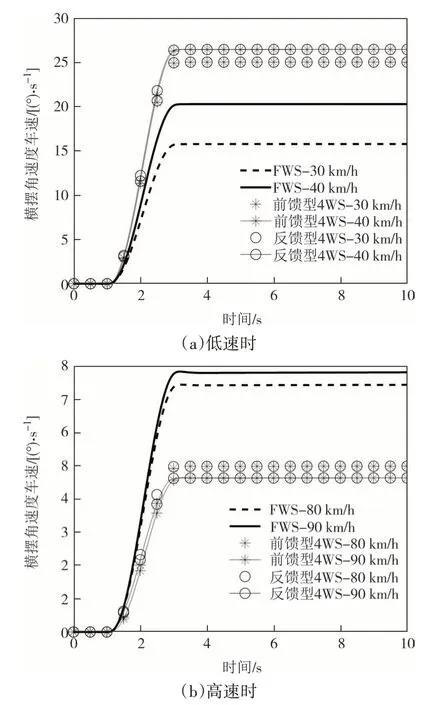
图6 车辆横摆角速度响应对比图Fig.6 Yaw rate comparison

图7 车辆质心侧偏角响应对比图Fig.7 Comparison diagram of vehicle sideslip angle response
加入EPS助力修正控制后的效果如图8所示.低速下,助力修正控制后的4WS 车辆转向盘力矩与FWS车辆几乎完全相同;高速下,助力修正控制后的4WS 车辆稳态值与FWS 车辆基本一致,瞬态值略大于FWS 车辆,但差距不明显.由此可见,四轮转向对驾驶员操纵转向盘力矩的干预基本消除,修正控制策略很好的保证了低速时的操纵轻便性和高速时的操纵稳定性.
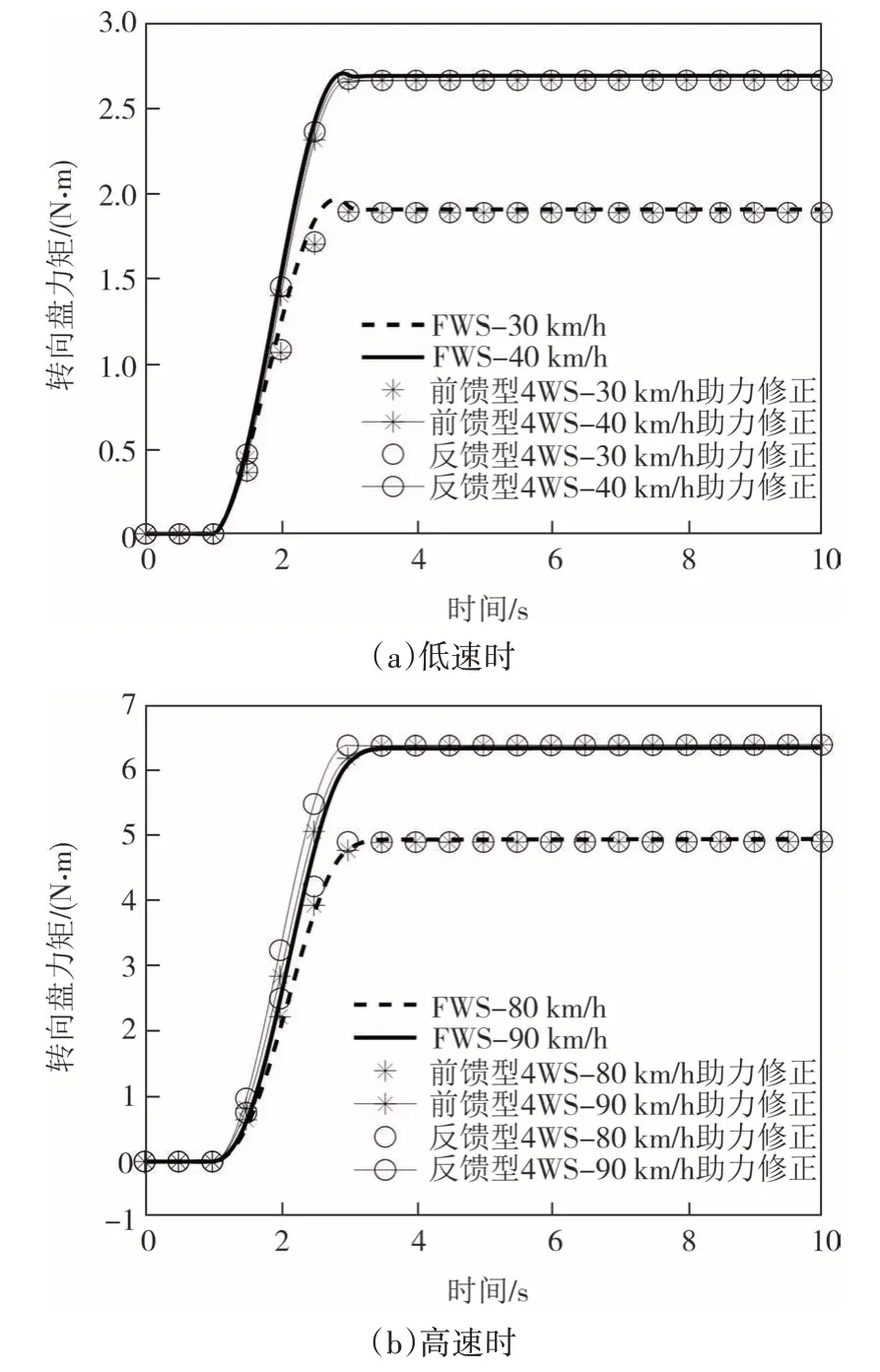
图8 加入修正控制后转向盘力矩对比图Fig.8 Steering torque comparison with correction control
4 结论
1)针对四轮转向干预驾驶员操纵转向盘力矩的问题,详细分析了干预产生的原因,得出低速时四轮转向使转向盘力矩增大而高速时使转向盘力矩减小的结论.
2)提出了EPS助力修正控制策略以消除四轮转向干预.
3)在MATLAB/Simulink 软件中建立了转向系统模型、整车模型和控制器模型,验证了所提出控制策略的有效性.
