基于LVC 的舰载机作战指挥训练系统设计 *
2024-03-18刘剑超董斐姬嗣愚吴穹
刘剑超 ,董斐 ,姬嗣愚 ,吴穹
(1. 中国人民解放军 91475 部队,辽宁 葫芦岛 125001;2. 中国人民解放军 92020 部队,山东 青岛 266000)
0 引言
由于舰载机作战具有环境复杂、跨度大、机动性强、对象多元等特殊性,实装实战训练风险极大且成本高昂,模拟训练在舰载机作战训练中不可或缺。为充分仿真目前多体系、多层次的战场环境,实现指挥训练与作战训练一体化,舰载机作战指挥训练的战术地位被进一步放大,随之其模拟训练系统建设也被提出更高要求:
(1) 高实时性。模拟训练中,一体化训练的趋势逐渐明显,而如何将多兵种、多岗位的作战人员放入同一个战场沙盒环境进行实时对抗成为了关键问题,因此提高模拟训练系统的实时性,保证不同地域、岗位人员按照作战流程实时参与训练,实时生成战场态势成为了重要需求。
(2) 高通用性。目前不同作战功能的模拟训练系统多为“各自研发”,程序中功能相同的部分被重复开发,而被重复开发的程序由于开发环境不同,程序直接互不相通,形成了技术壁垒而降低了程序通用性,也浪费了科研力量。
(3) 高真实性。模拟训练系统需做到在实装的基础上,开发虚拟环境,提高真实性。
针对上述训练需求,可以通过利用LVC(live virtual constructive)技术,构建舰载机作战指挥体系和兵力体系,实现与基于舰载机实装(live,L)、模拟器(virtual,V)和虚拟兵力(constructive,C)在回路的混合仿真系统协同运行[1]。由于LVC 仿真采用统一的通讯协议、时间轴与战场逻辑推进机制[2],因此可以在确保高实时性的基础上一定程度地促进不同模拟训练系统间的通用性,实现建设需求。
2016 年8 月,美军成功将4 架真实的F-16(艾尔森空军基地)战斗机和2 架模拟的F-22 战斗机相互连接,开展6 名飞行员的异地“4 对2”的空战训练。LVC 技术已经用于阿拉斯加州的“红旗”军演和“北方利刃”演习。在2018 年的“红旗”军演中,通过分布式加密安全网络,将全美国数百台模拟器及虚拟兵力模型连接到同一个战场环境中,网络化训练和LVC 训练使美军实战化训练得到了更深层次的发展,验证了LVC 在训练中的重要地位[3]。
1 整体设计
1.1 功能需求
(1) 支持多战位、多专业协同作业和红蓝方背靠背作战筹划,提高舰载机作战筹划工作效率和专业化水平。
(2) 具有自主行为能力的CGF(computer generated forces)兵力体系,在对抗推演过程中采取CGF 兵力自主交战与指挥员指挥干预相结合的方式,解决对抗兵力规模大、作战行动并发性强和指挥控制手段不足之间的矛盾[4]。
(3) 提供完善的对抗效果实时评估功能,实现消耗、战果、战损等交战结果的实时解算和多维度可视化展现,为指挥员提供辅助决策支持。
(4) 支持实装、模拟器、仿真系统等LVC 资源的快速接入,进一步提高系统扩展灵活性、提高系统运行实时性和可靠性。
1.2 系统结构
其系统框架及功能,如图1 所示。业务层从软件应用层描述一次完整的仿真过程以及依托该系统可开展的典型应用场景和系统运行模式。通过实现海战场仿真和各兵种指挥控制终端接入,支持多样化的海军舰载机部队作战仿真应用,包括作战构想仿真演示、人在回路作战推演、装备作战使用研究、对抗作战仿真实验、规则、算法、模型验证以及协同作战效能的评估,提供多种系统运行模式,包括“人在环”推演模式和闭环分析模式。工具层提供运维管理、作战筹划、作战推演、作战指挥、辅助决策和复盘评估等工具集合,对作战筹划、仿真推演、作战指挥和事后评估等训练过程全生命周期提供支持。模型资源层为构建海空作战体系提供仿真模型支持,包括战场环境模型、空间兵力实体模型、空中兵力实体模型、地面兵力实体模型、水面兵力实体模型和武器实体模型,以及用于支持LVC资源接入的接口模型等。运行支撑层是面向海空作战体系仿真运行和异构系统互联需求,以解决异构应用系统互联和交互为目标,基于分布式仿真架构,利用网络、分布计算、中间件和对象模型等技术构建的仿真平台。提供高性能仿真引擎、通信中间件、接口适配等服务功能,支撑异构混合、时空一致的海空作战仿真系统的协调运行。数据资源层主要指用于作战想定、装备参数、GIS 数据、模型资源、仿真数据、三维模型等内容的资源库,为系统开发、运行和分析评估等工作数据支持和存储服务。基础硬件层主要为训练活动提供计算机、网络、显控等硬件资源。
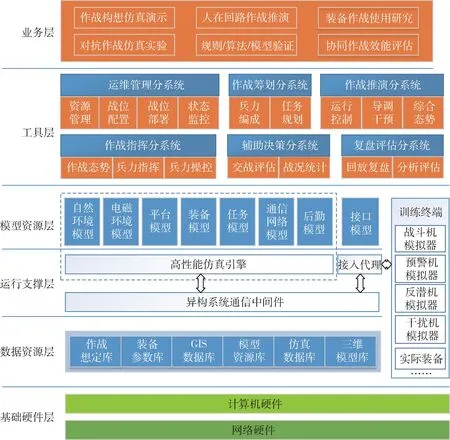
图1 系统框架图Fig. 1 Framework diagram of system
1.3 系统原理
运维管理、作战筹划、作战推演和复盘评估等分系统与仿真资源库、仿真引擎通过以太网连接,完成舰载机系统的训练准备、训练管控和训练评估工作[5]。训练过程中,指挥人员依托作战指挥分系统和辅助决策分系统,通过通信中间件对所属C,V等舰载机兵力实施指挥控制,与红军LVC 兵力进行模拟对抗。训练系统中的实装系统和半实物模拟器等LVC 资源通过通信中间件、接入代理与本系统实现数据交互,通过时统服务进行时间统一管理[6]。
2 各子系统功能设计
2.1 运维管理分系统
运维管理分系统完成资源准备、系统准备和运行维护等功能。提供系统配置、用户权限管理和系统日志管理功能。能够进行兵力装备属性信息、武器挂载方案等数据管理,支持对兵力装备属性数据的浏览和编辑,主要包括中、美、日、韩、印等主要国家的车辆、飞机、水面舰艇、潜艇、战场设施、卫星等主战兵力装备的数据,并支持数据修正及新增型号兵力[7]。
在LVC 运行过程中,海量战场数据理论上来说都需要运维管理系统进行调度,运维的难点在于数据跨度大、种类多、端口多。单以一个数据库为例,要存储人员、态势、行动,以及大量不以人工操作为前提的客观战场环境、装备信息等[8]。因此,运维系统设计的重点在于信息规范,也就是以统一的编码标记系统内各个实体,再根据实体类别下发IP 以及相关权限。编码标准要具备唯一性、可添加、可分支、索引科学合理实用等特性,在运维调度中,所有信息参数调度工作的最高逻辑应来源于编码,如果编码前期考虑不足,很难再添加不同种类、不同数量实体,严重影响二次开发。在编码构建完毕后,再根据编码下发IP 以及相关权限,并且建立对应表备查,为后续保障、开发、排故工作提供便利。
2.2 作战筹划分系统
作战筹划分系统完成想定基本信息配置、海战场环境配置、兵力编成与部署、兵力任务规划和初始态势标绘等功能。主要包括兵力编成和任务规划两个模块[9],支持采用协同作业的模式分战位、兵力编成完成想定编辑工作。
作战筹划系统主要在系统初始化阶段发挥作用,对于降低系统内存需求及系统延迟具有重要意义。在系统运行前,根据人为选择结果想定数据,进而加载战场环境,根据训练科目以及装备参数制定作战方案所需实体集,放弃加载其他参数,提高系统总体运行效率。因此,该部分代码设计通常在初始化头文件中调用,出现位置在想定数据加载之前,如果该系统被使用,则应重新完成想定参数初始化与加载过程,重新开始训练。
2.3 作战推演分系统
作战推演分系统用于在训练前,对作战计划进行仿真推演,指挥人员根据仿真推演结果优化作战计划。提供系统同步控制和运行过程控制手段,实现各仿真节点间的时间统一和仿真同步,在系统监控信息的支持下,对推演任务运行进程实施有效管控,作战推演人员在宏观和全局上对作战情节进行引导和控制,以保证对抗推演的各个环节都能处于严密的领导和控制之下,以达成满足推演要求的对抗条件,并按照顺序和节奏运行[10]。
目前LVC 常用的作战推演模型为兵棋推演模型,由于LVC 系统的战场模型较为复杂,兵棋推演模型中算法简单、通用性强等优势更加明显,并且基于运维系统的实体编码体系,可以较快编辑好兵棋“元知识”与棋盘设置,进而明确着法规则以及评估标准。决定推演逻辑的博弈树搜索算法近年来也渐渐趋于固定,Alpha-Beta 算法、迭代深化等基础算法仍较为主流,因此不再详述。
2.4 作战指挥分系统
作战指挥分系统在海战场仿真环境中,为联合(合同)作战背景下的舰载机作战行动提供指挥手段,为指挥人员提供作战态势显示和作战指挥功能。对舰载机兵力探测到的各类目标信息进行汇总、融合等处理,形成虚实结合、时空一致的战场综合态势,供指挥人员进行情报态势分析、威胁判断、作战决策等指挥活动。支持指挥人员对舰载机阵营中的实装、模拟器或虚拟兵力进行指挥控制,指挥内容包括兵力编组与解散、兵力任务分配、目标指示等。
作战指挥分系统的主体为多个界面类软件,设计的重点在于提升交互性以及界面优化效果,可通过利用QT 等用户界面开发程序进行优化。
2.5 辅助决策分系统
辅助决策分系统用于根据作战态势实时计算兵力对抗结果,为指挥人员评估战场形势、下达指挥决策提供辅助支持。提供作战结果计算工具,实现对作战过程中影响战场态势的关键对抗行为进行实时评估。主要包括武器命中效果评估、目标毁伤效果评估、传感器探测效果评估和干扰效果评估等4 项功能。
2.6 复盘评估分系统
复盘评估分系统提供数据记录、回放和分析评估功能,用于基于仿真数据,对预先定义的指标进行量化评估,为训练评估工作提供数据支持。主要包括数据回放复盘和分析评估2 个模块。
2.7 舰载机作战仿真模型体系
舰载机作战仿真模型体系以水面、空中等主要作战空间的作战平台、指控系统、传感器装备、电子对抗装备、火力打击装备等为仿真对象,利用组件化建模技术开发的功能级仿真模型,能够根据战情想定,在仿真引擎驱动下推演典型合同作战过程,按照实际对抗流程模拟产生关键交战事件和交战数据,为海军合同作战战法研究、推演对抗等研究工作提供仿真环境。主要包括模型开发和仿真模型库。
2.8 仿真资源库
仿真资源库用于存储、管理整个仿真生命周期中涉及到的各类资源,并提供统一的资源管理接口,为数据资源管理以及配置与部署等功能提供支持。各子系统的分工组成如图2 所示。
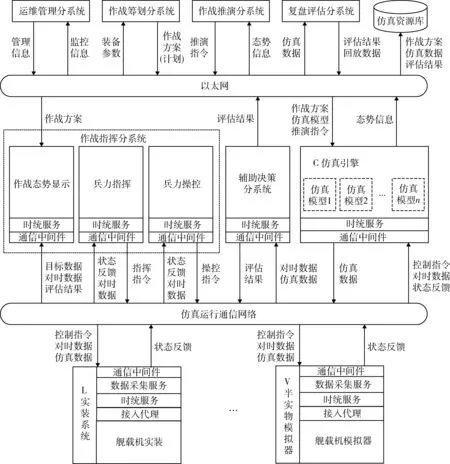
图2 系统组成图Fig. 2 Composition of system
3 系统应用模式
3.1 “人在环”对抗推演模式
系统主要采用“人在环”的对抗训练应用模式,对作战方案进行接近实战条件下的仿真推演,指挥人员对舰载机兵力进行指挥控制,与红军LVC 兵力进行对抗,通过对对抗效果的分析评估,验证作战方案的有效性和可实施性,锻炼红军参训人员作战技能。使用过程包括:训练准备、训练实施、训练评估,如图3 所示。
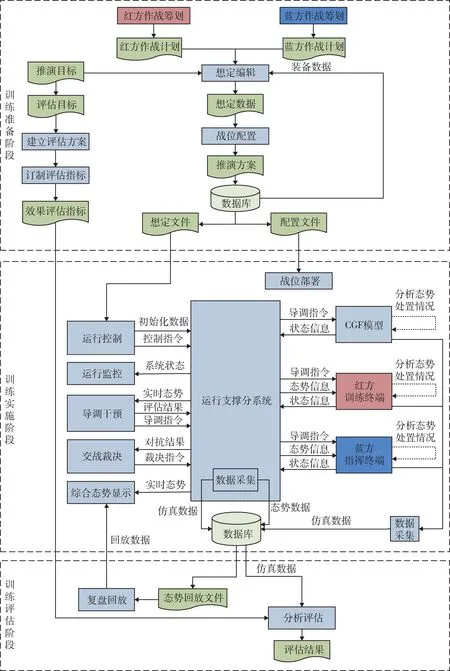
图3 “人在环”应用模式Fig. 3 Application mode of "human-in-the-loop"
3.2 “人不在环”闭环推演模式
“人不在环”的闭环推演模式主要用于对具体的作战计划进行“人不在环”的推演评估,目的一是对作战计划进行检查,对存在问题进行分析;二是对作战计划的预期结果进行评估,为评判作战计划优劣和装备作战能力提供依据。使用过程包括想定编辑、仿真运行和分析评估,如图4所示。
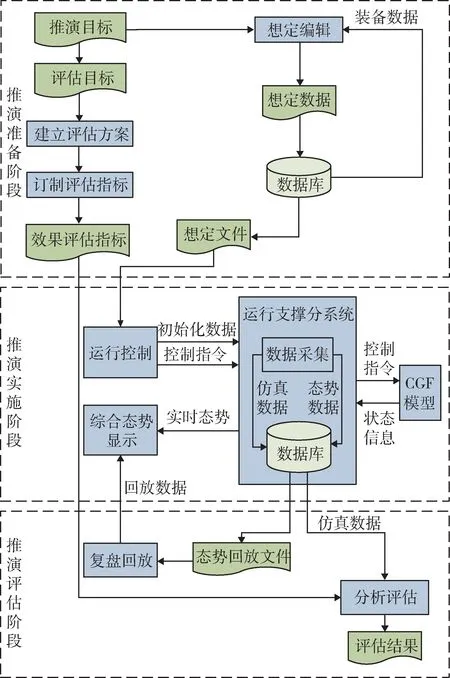
图4 “人不在环”应用模式Fig. 4 Application mode of "human-out-of-the-loop"
4 关键技术分析
4.1 高性能并行仿真引擎驱动技术
系统中具有多种训练形式(单级单要素、单级多要素、多级多要素),涉及到的战位多种多样(导控席、多个参训席、态势席、评估席等),需要采用集中式运行、分布式显控的应用模式,同时要利用单台计算机的多核CPU 资源,充分提高运行效率[11]。仿真引擎支持动态配置外部模块的机制,实现特定接口的外部模块在仿真引擎启动时能够正确地被加载并初始化。仿真运行时,引擎能够动态执行扩展模块的内容。仿真引擎结构设计如图5 所示。
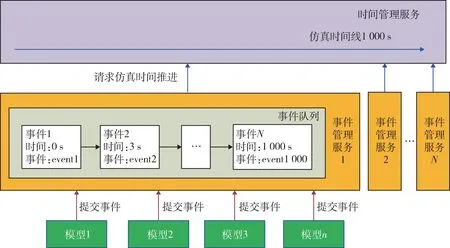
图5 仿真引擎结构Fig. 5 Structure of simulation engine
4.2 联合仿真中间件技术
通信中间件是互联互通互操作的基础,在充分借鉴各种通信中间件的基础上,采用基于接口的编程技术,支持对象方法、属性、消息的定义,支持远程异步或同步方法调用[12];在网络资源有限、带宽不足的情况下,提供基于主题的动态公布订购机制,通过动态QoS 满足订购方在不同时期对公布方的数据质量(如:发送频率、可靠性、延迟)提出不同的需求,与OMG-DDS 相比,动态QoS 极大地减少了网络的开销,还可根据实际需要选择使用不同的数据传输通道(如:RTPS,TCP,UDP,反射内存网等)[13],不同通道之间可以灵活切换。
4.3 工程数字模型封装集成技术
组件化仿真建模方案能解决体系仿真大部分实体模型的建模问题[14],在模型框架的作用下实体模型能正确地参加仿真计算与交互。在体系仿真中还有一部分模型组件,即工程数字模型,是重点研究对象,由不同部门研发,与组件化建模规范不一致,需要集成到系统之中。若采用动态库调用的方法,需要在模型体系相应的组件类中加入转换算法,势必增加模型的运算量,降低运行速度和增加时延。较好的解决方法是代码重用,如图6 所示,图中上部分是现有模型,中间是组件化模型体系,下部为新开发的组件模型。
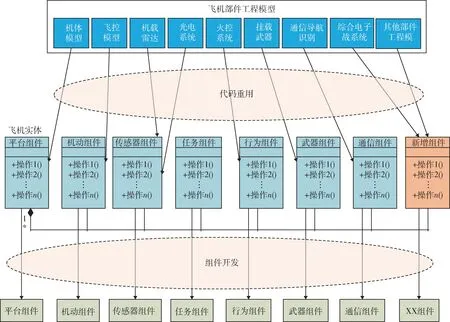
图6 数字模型集成Fig. 6 Integration of digital model
4.4 训练数据采集技术
借助数据采集服务,系统通过提供统一的数据采集方案,为事后复盘分析、数据分析评估提供一致的数据来源[15]。对于全数字仿真,提供仿真过程全面、可定制、可扩展、高速的数据采集功能。对于“人在回路”仿真,在全数字仿真基础上,提供人工操作的数据采集,并与全数字仿真数据采集融合关联。本文设计了以下几个数据采集器,用来对上述数据进行采集。
(1) 想定数据采集器。采集想定基本信息、实体部署信息。
(2) 探测数据采集器。采集所有传感器的探测数据。
(3) 态势数据采集器。采集仿真过程中所有的态势变化信息。
所有的数据采集器都实现了统一的采集接口,支持用户的二次扩展。采集后的数据以文件的形式存储在运行仿真引擎的计算机磁盘上。体系仿真同时提供对采集数据的加载、读取操作接口,为仿真数据的进一步应用开发提供支撑。数据采集执行流程如图7 所示。
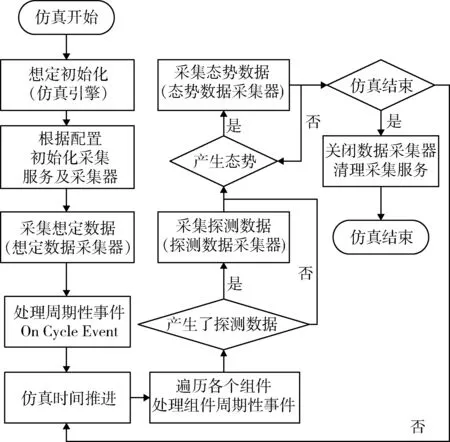
图7 数据采集流程Fig. 7 Process of data collection
5 结束语
利用仿真手段构建舰载机作战指挥体系和兵力体系,实现与基于LVC 在回路的混合仿真系统协同运行,支撑联合(合同)作战背景下海军舰载机部队全要素、全过程仿真,为海军航空母舰编队作战装备效能评估、战术战法检验和模拟对抗训练等活动提供研究条件,能够支撑海军部队开展模拟演习演练,支撑海军舰载机部队开展作战技能训练。