潜艇强机动变深规避鱼雷攻击仿真研究 *
2024-03-18丁文强丁浩赵志允
丁文强,丁浩,赵志允
(海军潜艇学院,山东 青岛 266199)
0 引言
潜艇在执行作战任务时,会面临来自空中、水面和水下的威胁,其中,最直接的威胁是各种反潜武器的攻击。现代鱼雷高性能战斗部、智能识别和精确制导等技术的快速发展,使鱼雷对潜艇的威胁更趋严重。当潜艇发现来袭鱼雷攻击征兆时,可以采取常规机动驶离鱼雷搜索带、使用对抗器材、强机动等多种规避方法[1-2]。但是,鱼雷航速、航程以及声自导性能的不断快速发展,使鱼雷能够快速准确地捕获潜艇目标。对于潜艇而言,以往某些行之有效的规避对抗手段在新型鱼雷搜索攻击过程中难以发挥作用。当潜艇采用其他规避方法无法有效应对鱼雷攻击时,利用强机动变深来进行规避鱼雷末端攻击弹道,是潜艇不得已而用之的规避措施,也是潜艇防御鱼雷的最后措施。应当对该方案的有效性加以验证和研究,这对提高潜艇生命力和战斗力具有十分重要的理论研究意义和军事应用价值。
1 强机动变深规避方案分析
1.1 强机动规避方案基本原理
潜艇强机动是潜艇在水下高速航行状态下,以大舵角改变航向或以大纵倾改变深度的机动,或者在改变航向的同时改变深度的机动[3]。潜艇在遭受反潜鱼雷攻击的过程中,当听测到来袭鱼雷的主动脉冲信号重复周期逐渐变短、鱼雷航行噪声不断增强时,可以判明鱼雷已有效跟踪潜艇并不断向潜艇驶近。若鱼雷已抵进距潜艇较近距离,潜艇在采用其他规避措施确无效果,此时应果断采用强机动措施进行规避鱼雷末制导攻击。鱼雷若因潜艇强机动丢失目标后,一般会沿丢失目标前的雷目连线方向直航一定距离后执行再搜索。此时,潜艇可执行浅水层停车或低速机动等后续战术动作进行规避。强机动规避方案的根本目标是:通过潜艇急剧变向或变深机动,使鱼雷在短时间内丢失对潜艇的捕获跟踪或鱼雷非触发引信无法动作,从而达到潜艇规避鱼雷末端攻击弹道的效果[4]。此规避方案应注意使用时机,特别是针对潜艇强机动变深速浮到水面状态的规避方案而言,应当是在确定蓝方海面和空中反潜兵力较弱或者有其他红方兵力支援时采用,否则从潜艇安全性考虑是不宜采用的。
1.2 外军研究情况
文献[3]中显示美军已经开展了潜艇采用强机动规避鱼雷攻击的理论研究和实际验证。他们曾实验使潜艇以尾倾大于30°的姿态从水下突然上浮至海面,并作为其规避鱼雷攻击的手段之一。再如,在2018 年,伊朗海军位于霍尔木兹海峡进行大规模军事演习时,按照演习计划伊朗海军在指定海域投下70 枚深水炸弹,结果却发生了意想不到的一幕:深水炸弹爆炸的同时美军3 艘核潜艇也急速浮出水面[5],如图1 所示。由此可见,潜艇强机动速浮至水面或浅水状态未尝不是一种保持潜艇生命力的可行方法。

图1 潜艇大纵倾浮出水面示意图Fig. 1 Diagram of submarine breakwater by a big tail incline
1.3 强机动方式效果
潜艇强机动方式从理论上讲可以有3 种:①水平面快速变向;①垂直面快速变深;③同时进行快速变向和变深[6]。水平面快速变向是指潜艇高速航行状态,操纵方向舵以较大舵角进行旋回,使潜艇快速进入鱼雷水平面的最小旋回圈之内,鱼雷不能对我潜艇进行攻击,从而达到规避鱼雷攻击的效果。一般情况下,鱼雷均存在末端攻击直航弹道,即鱼雷与目标达到一定近的距离后,在水平面内鱼雷不再进行摆舵机动,而是直接向最后一个探测目标位置点航行完成攻击,因此,当潜艇和鱼雷接近到一定距离时,鱼雷进行直航攻击,如果潜艇把握好时机进行转向,使鱼雷从潜艇侧面穿过,同时潜艇与鱼雷之间的距离大于鱼雷的非触发引信作用距离,理论上也可以实现有效规避。潜艇垂直面快速变深强机动包含速浮和速潜2 种,速浮是使用高压气吹除压载水柜的水和车、舵同时作用,而速潜是向压载水柜注水和车、舵同时作用,但是高压气排水效率要优于注水效率,故速浮的变深速率要远大于速潜的变深速率,同时考虑到反潜鱼雷在浅水攻击能力较差的特点,因此应着重研究潜艇速浮至接近海面,避开鱼雷弹着点进行规避的方案。
综上,潜艇想要快速改变水平面的航向只能采用高航速大舵角的方式,其变向效果相对有限;而潜艇进行速浮时,可以采用车、舵和高压气吹除水柜的水来快速获取正浮力,从而使潜艇急速上浮,相比于变向而言,其速浮的变深效果要更加有效;而同时进行变向变深难以操纵而且同样涉及变向效果较为有限的问题。因此,本文主要围绕潜艇采用强机动变深规避鱼雷攻击的过程进行仿真计算,并分析其可行性和有效性。
2 潜艇强机动变深规避鱼雷过程仿真
2.1 设置参数
在仿真过程中,首先对潜艇和鱼雷攻防过程的各个参数进行设置:潜艇进行强机动时鱼雷与潜艇之间的初始距离为D;潜艇开始强机动后经过的时间为t;潜艇强机动初始航速为vs;潜艇强机动的纵倾角度为β;潜艇由于高压气排水产生的初速度为v0;潜艇由于高压气排水产生的平均加速度为a;潜艇的艇长为l;鱼雷的旋回半径为r;鱼雷的旋回角速度为ω,反潜鱼雷的近炸引信探测距离为d,如图2所示。反潜鱼雷攻击阶段进行纵倾操舵的指令是由一个确定脉冲宽度的脉冲τ决定,这个操舵指令脉冲是在接收到有效回波脉冲之后延迟Δτ开始的,即当鱼雷探测到潜艇变深后经τ+ Δτ后启动纵倾操舵,在仿真过程中即鱼雷转向滞后于潜艇强机动变深的时间差。另外,由于潜艇强机动规避鱼雷末弹道的时间较短,海洋环境对攻防过程中潜艇和鱼雷机动的影响相对较小,故将海洋环境参数设定为典型场景:声场类型为表面声道,海况等级为3 级,海水温度为20 ℃,混合层厚度为100 m。
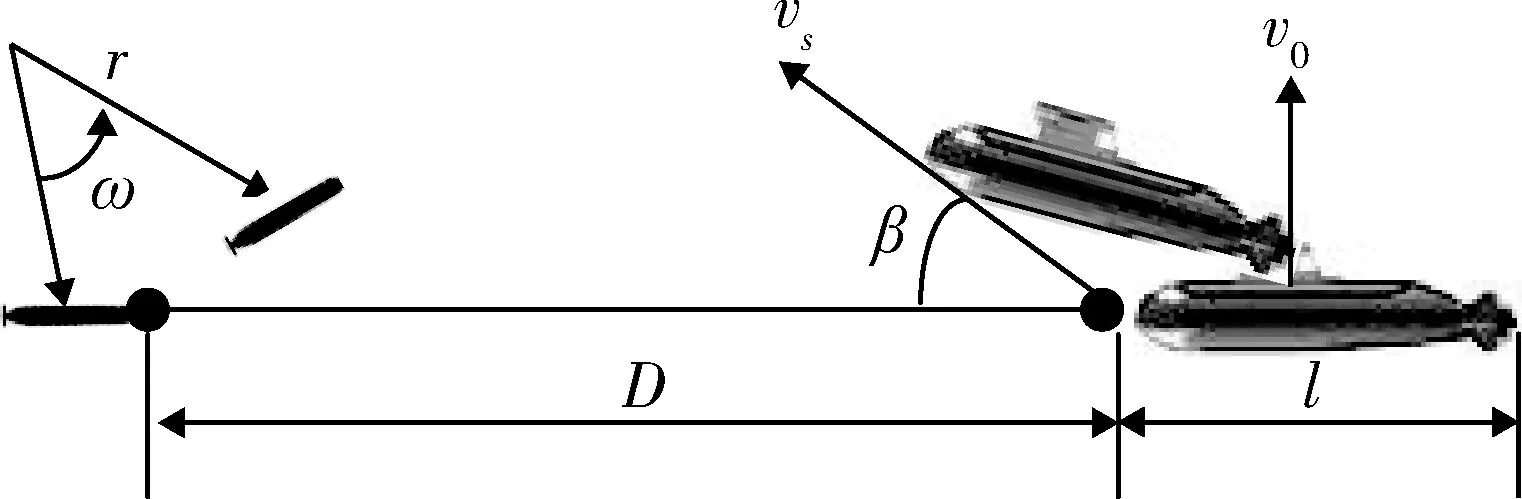
图2 设置参数示意图Fig. 2 Schematic diagram of setting parameters
2.2 仿真过程
由于鱼雷速度要远大于潜艇机动速度,所以在对潜艇强机动变深规避鱼雷攻击进行仿真的过程中,不再考虑潜艇采用较低航速机动摆脱鱼雷跟踪的情况,而是使潜艇迎向鱼雷尽快进入鱼雷末端攻击旋回圈内,并且在一定时间范围内潜艇的深度变化量需要大于鱼雷追踪弹道的深度变化量。此时,潜艇位置点位于鱼雷攻击旋回圈范围之内,使鱼雷非触发引信不能动作,从而达到规避鱼雷末端攻击弹道的效果。在鱼雷旋回圈内,潜艇和鱼雷的深度变化量随时间变化的关系如图3 所示。
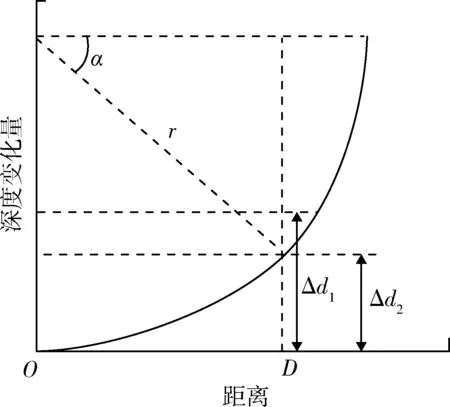
图3 垂直面变深强机动时潜艇和鱼雷的深度变化量随时间变化的关系图Fig. 3 Relationship diagram of depth-changing between submarine and torpedo along with time
图3 中Δd1为潜艇深度变化量,Δd2为鱼雷深度变化量。只有当Δd1>Δd2时,潜艇才能有效规避鱼雷末端攻击弹道。可以得出潜艇与鱼雷水平距离为
潜艇与鱼雷垂直距离为
式中:t′为鱼雷末端弹道追踪潜艇的计时时间:
建立潜艇和鱼雷机动模型,使用Matlab 工程仿真软件对强机动规避过程进行仿真[7-13],可以得出当潜艇与鱼雷处于一定的初始距离(以117 m 为例)时两者深度变化关系和水平距离关系,分别如图4,5 所示。
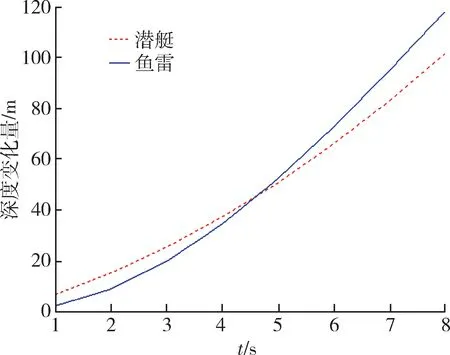
图4 潜艇与鱼雷深度变化关系图Fig. 4 Changing relationship diagram of vertical distance between the submarine and the torpedo
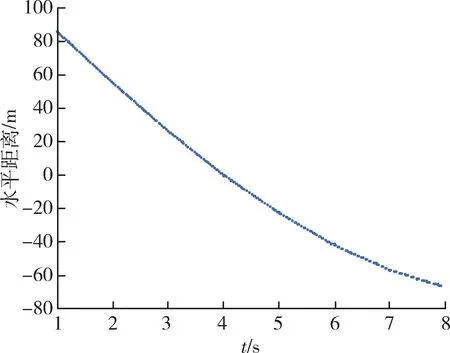
图5 潜艇与鱼雷水平距离关系图Fig. 5 Changing relationship diagram of horizontal distance between the submarine and the torpedo
仿真过程中,潜艇与鱼雷的初始距离是以鱼雷旋回半径为边界值,在此设定鱼雷的旋回半径为117 m,根据鱼雷和潜艇航速,在时间轴上设置一定时间间隔,仿真初始距离由边界值向两侧分别进行仿真计算。时间间隔以1 s 为例,仿真的初始距离间隔为23 m,则分别仿真潜艇与鱼雷初始距离为140,117,94 m 时的位置关系,如图6所示。
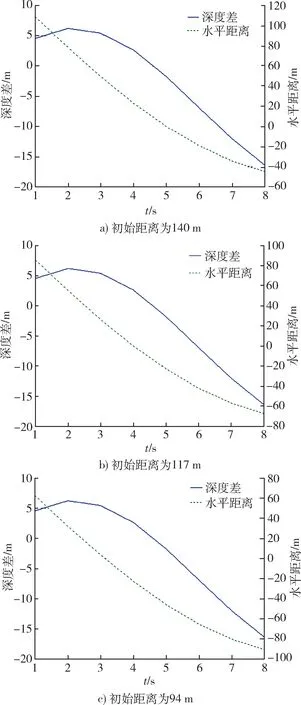
图6 潜艇与鱼雷不同初始距离的位置关系图Fig. 6 Relationship diagram of changing position between submarine and torpedo when the different distances
以上是以潜艇与鱼雷的仿真初始距离为设定的鱼雷旋回半径及其边界值两侧的3 个例子,进行仿真得出的水平和垂直位置关系图,其他初始位置情况不再一一列举。根据多次仿真结果,对潜艇和鱼雷位于同一水平面时的水平距离ΔD1、当潜艇与鱼雷位于同一垂直面时两者的垂直距离ΔD2进行分析,其中ΔD1>0 表示潜艇位于鱼雷旋回圈之外,ΔD1<0 表示潜艇位于鱼雷旋回圈之内,ΔD2>0 表示潜艇位于鱼雷上方,ΔD2<0 表示潜艇位于鱼雷下方,具体不同情况如表1 所示。
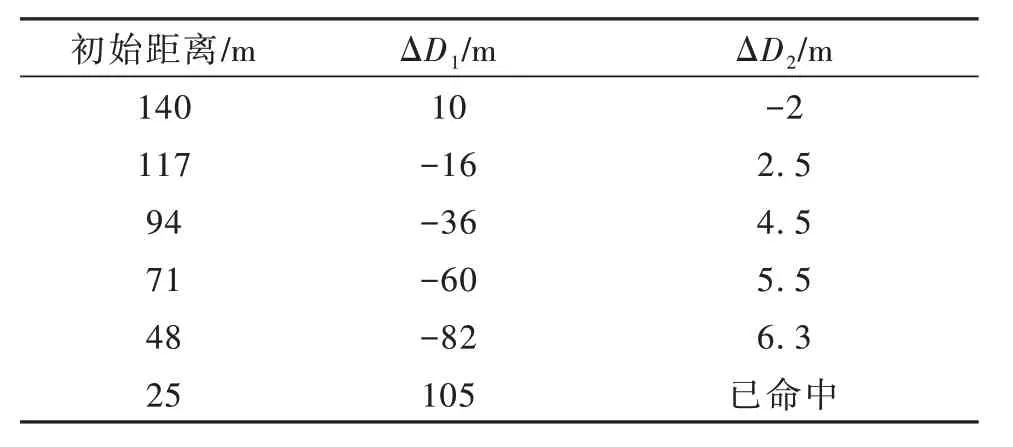
表1 不同初始距离对应的ΔD1 和ΔD2Table 1 ΔD1&ΔD2 by the different initial distances
3 仿真结果分析
通过对已设定的模型参数进行仿真,再结合潜艇与鱼雷的相对运动态势,可以分析出潜艇采用强机动变深规避鱼雷末端攻击弹道的仿真结论。分别剖析潜艇在垂直面和水平面的规避效果,然后明确应用仿真结论时应注意的问题。
3.1 仿真规避效果分析
从表1 中可以看出:在垂直面上,当设置潜艇与鱼雷的初始距离为140 m,潜艇和鱼雷运动至同一垂直面时,ΔD2为-2 m,即艇雷的初始距离在140 m以上时ΔD2为正值,潜艇位于鱼雷下方,此时潜艇已不能靠快速上浮来摆脱鱼雷的追踪。同理,当设置初始距离为117,94,71,48,25 m 时,ΔD2>0,即潜艇位于鱼雷上方,此时,若ΔD2大于鱼雷近炸引信探测距离d,满足引信不被击发的条件,此时在垂直面上是符合规避要求的。
而在水平面上,潜艇能够成功规避鱼雷的末端追踪弹道需要同时满足以下条件:①要求潜艇位于鱼雷的旋回圈内,即ΔD1<0;②需要考虑艇雷之间水平距离ΔD1与潜艇艇长L之间的关系;③初始距离要大于仿真间隔距离和鱼雷近炸引信探测距离之和。特别是当鱼雷和潜艇位于同一深度时,只有当两者的水平距离大于艇长,即|ΔD1|>L,即整个潜艇位于鱼雷旋回圈之内才能有效规避鱼雷的弹着点。以潜艇艇长为80 m 为例,则仿真过程中的初始距离为48 m 时,可以达到成功规避的效果。
3.2 仿真结论应用说明
以上仿真结论是在未考虑艇指挥员下达口令与操纵装备时间误差的情况下进行的。在实际验证或战时采取该规避方案时,还应当考虑将潜艇指挥员下达口令时间和操作人员执行命令时间计算在内。也就是说,潜艇开始进行规避机动与指挥员下达速浮指令之间有一段时间间隔,在潜艇采用强机动规避鱼雷的时机初始距离应当为此段时间内两者的相对航程与仿真结果的初始距离之和。当艇指挥员在合适的距离上,下达供气速浮口令,采用强机动规避鱼雷攻击末端弹道时,在理论上是可以有效规避鱼雷攻击的。
4 结束语
当潜艇与来袭鱼雷已经处在较近距离(5 链以内),潜艇来不及使用对抗器材或纯机动规避反潜鱼雷无效时,应果断采取强机动规避其攻击的方案。通过仿真验证得出其实施过程为:在一定距离范围内,潜艇指挥员下达供气速浮口令,利用高压气吹除全部或部分主压载水舱的水,使潜艇大尾倾高速上浮至水面,随后迅速下潜到浅水层完成规避机动。此方案只有当潜艇所在海域水面和空中反潜兵力威胁较小或有其他红方兵力支援、潜艇处在较大深度航行且近距离发现来袭鱼雷已跟踪红方潜艇时可以视情采取。在其他情况下,采取此方案时要慎重考虑,以避免潜艇迅速浮出海面被蓝方其他兵力发现攻击。