防空作战中多边形责任区预警机空域配置方法 *
2024-03-18祁炜王海杰程东升郑澳粤
祁炜,王海杰,程东升,郑澳粤
(1. 空军预警学院,湖北 武汉 430019;2. 中国人民解放军94981 部队,江西 南昌 330200)
0 引言
在防空作战中,预警机遂行预警作战任务的责任区一般为不规则多边形,在多预警机协同预警作战时,由于责任区边界不规则,存在责任子区不易划分、空域配置时可用空域不易确定等问题,致使预警机空域配置方案很难形成。目前,常采用不规则多边形的外接矩形对此问题进行简化处理[1-7]。如文献[6]对预警机在管控识别区中的研究,文献[7]对预警机协同警戒时的空域配置研究等都是将责任区理想化为规则多边形,但这种方法会使预警机遂行预警作战任务的责任区扩大,从而造成所需预警机架数增多、协同作战效能下降等问题出现。文献[8]研究了航母舰队中预警机对不规则威胁的发现近界,但是没有对威胁扇面的探测覆盖以及多预警机协同覆盖进行研究。因此,研究一种基于当前防空作战不规则多边形责任区的预警机空域配置方法,具有很强的实际应用价值和军事意义。
为便于读者理解,本文以随机生成的不规则多边形为例进行预警机空域配置方法的思路阐述。通过确定预警机安全巡逻空域,并在预警机实时探测覆盖区量化模型的基础上,确定预警机责任子区,最后采用遗传算法(genetic algorithm,GA)得出预警机优化后的空域配置方案。
1 问题描述
预警机在遂行防空预警作战任务时,其责任区一般为不规则多边形。如图1 所示,不失一般性,令责任区是以AW1,AW2,AW3,…,AWa为顶点的不规则多边形,其区域面积Szr。预警机在遂行作战任务时,其最远阵位选择应综合考虑对方战斗机飞行速度、对方空空导弹射程、预警机回撤飞行速度、己方导弹拦截线位置等因素,图1 中最远安全阵位线、己方导弹拦截线和回撤安全线设置方法及量化估算模型,参见文献[9]。
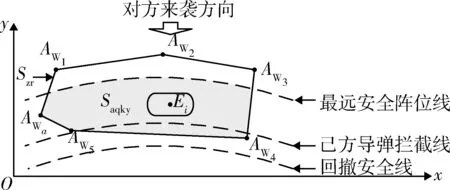
图1 预警机巡逻空域示意图Fig. 1 Patrol airspace diagram of AWACS
显然,预警机安全巡逻空域应处于最远安全阵位线后方,当责任区纵深较大时,为获得更大的探测当面宽度和更远的预警覆盖区域,预警机阵位应尽量前伸,其责任区内预警机可用安全空域面积Saq_ky如图1 中灰色区域所示,构建坐标系Oxy,y轴平行于对方来袭方向,并令责任区位于第1 象限。
2 区域防空作战预警机空域配置
2.1 确定可用空域
不失一般性,令预警机采用跑道型巡逻航线,如图1 所示,第i架预警机阵位中心点为Ei,其实时探测覆盖区面积Spar_inter_rr_i,计算可参考文献[10]。
预警机在遂行作战预警任务时,需要综合考虑预警机的机动能力、实时探测区面积和情报感知的稳定性,以确定预警机最小可容忍的转弯直径和直飞距离LYrr,其应满足:
基于预警机任务区域、安全区域和单架预警机实时探测区域,并根据责任区空域覆盖度求解预警机同时出动架数和可用空域,其步骤如下:
step 1: 确定预警机出动架数。多架预警机在遂行预警探测任务时,探测空域存在交叠,用空域稳定覆盖度来表征预警机对责任空域的预警程度,如式(2)所示。当预警机架数增加到n架,且满足空域稳定覆盖度评估准则时,停止预警机架数寻优,n即为预警机出动架数。
式中:γcov_one为n架预警机稳定覆盖度为针对作战任务预期(可容忍度)的稳定覆盖度;Spar_inter_rr_i为第i架预警机的实时探测覆盖区面积。
预警机实时探测覆盖区为弧拱形,其对责任区稳定覆盖度难以直接用公式求解,本文引入网络覆盖模型[11],对责任区进行栅格化处理。令每个栅格边长为Δl,形成x×y的矩阵A,对矩阵A中符合条件的元素进行赋值,通过统计矩阵A中满足条件的元素个数估算多预警机协同探测覆盖区对责任区的稳定覆盖度。若矩阵A中有x个元素满足赋值条件,则稳定覆盖度为x· Δl2/Szr。
step 2: 确定空域配置方案。当n= 1 时,即只需1 架预警机即可满足任务责任区覆盖要求,此时巡逻航线中心点越靠近Saq_ky中心位置越好。
当n≥2 时,按紧凑准则(可充分发挥预警机对责任区交叠覆盖探测能力)对空域配置方案进行遴选,得出预警机空域配置优化方案Pone_jc_opt。紧凑准则为
step 3: 确定责任子区顶点。经过step 1 和step 2,图1 的责任区Szr被分解为如图2 所示的多个责任子区,并综合考虑多预警机实时探测覆盖区与责任区Szr的位置关系确定其顶点。若责任区Szr的顶点包含在预警机实时探测覆盖区内,如顶点,则直接确定为相应责任子区的顶点。若责任区Szr的顶点包含在预警机实时探测覆盖区以外,如顶点,则此时责任区Szr与预警机实时探测覆盖区有交点和,则交点确定为相应责任子区的顶点。同时,两架预警机实时探测覆盖区域Spar_inter_rr之间的交点Jc_i(i= 1,2,…,m)由于与责任区Szr所处位置的不同分为以下2 种情况:
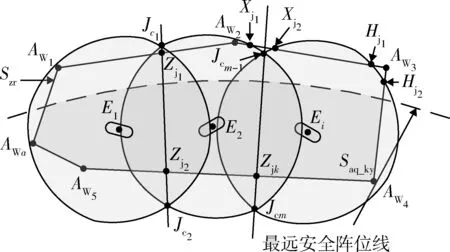
图2 责任子区顶点示意图Fig. 2 Vertexes diagram of responsibility subarea
(1) 当交点处于责任区Szr内部时,如,则即为责任子区顶点,此时2 架预警机的实时探测覆盖区与责任区Szr有交点和,2 个交点也确定为责任子区顶点;
(2) 当交点处于责任区Szr外部时,如和,连接和的连线,与处于Spar_inter_rr内的责任区边界有交点,则交点确定为责任子区顶点。
此处采用射线法[12]对各关键交点是否处于责任区内进行判断,从而最终确定各责任子区的所有顶点,得到顶点数U。
step 4: 划定预警机责任子区。根据step 3 确定的责任子区顶点,将责任区Szr划分为图3 所示的i(预警机架数)个责任子区。
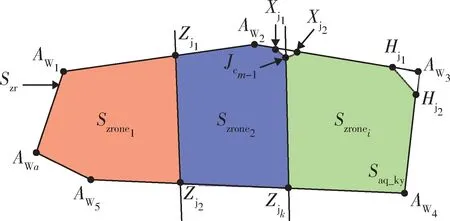
图3 预警机责任区分布示意图Fig. 3 Responsibility airspace distribution diagram of AWACS
step 5: 确定各预警机空域配置可用空域。以责任子区各顶点为圆心,以预警机最大探测距离为半径画圆,其交叠区域即为满足覆盖责任子区范围的预警机空域配置可用区域。同时,空域需处于安全巡逻空域内(如图4 所示),则为
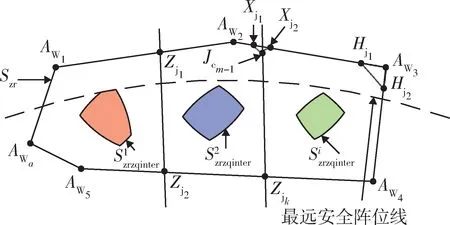
图4 各预警机实时探测区域可用空域分布示意图Fig. 4 Available airspace distribution diagram of each AWACS for real-time detecting
令第i架预警机的阵位中心点Ei坐标为,预警机直飞航线与垂直于对方来袭方向的夹角为α[2],则预警机可用空域约束条件为
2.2 预警机空域配置优化
得到预警机可用空域配置模型后,利用稳定覆盖度及作战效能评估指标寻找最优配置,其流程如下:
step 1: 初始化。设置第i架预警机实时探测可用空域,最优稳定覆盖度γcov_two_opt的最大迭代次数G,航线倾角初始值αlin(即Pone_jc_opt中预警机航线倾斜角值)和步进值,直飞航线LY和转弯直径WY的初始值,和增大步进值δdz_L、δdz_W。
step 2: 优化稳定覆盖度。各预警机采用和在各自空域内进行优化,其最优稳定覆盖度评估准则为
式中:γcov_two_g为第g次迭代的优化稳定覆盖度;Δγ为矩阵法计算误差值。
step 3: 空域配置优化。各预警机在内进行阵位优化,按照δdz_L,δdz_W步进增大各预警机直飞航线和转弯直径,每次迭代结果均与以下约束条件进行比对:
式中:Sroute_i为第i架预警机巡逻航线所占空域;γcov_final为所有预警机每次迭代后的责任区稳定覆盖度。
如果满足优化约束条件,则保留此空域配置方案,不满足则舍弃,最终得到C个满足条件的空域配置方案。当预警机巡逻速度固定时,直飞航线越长,获得的稳定探测时间越长,转弯直径越大转弯坡度角越小,从而获得更佳的探测效能,因此预警机作战效能评估指标为
式中:为第i架预警机直飞航线长度;为第i架预警机转弯直径大小。显然当预警机第g次迭代的优化稳定覆盖度小于作战任务预期的稳定覆盖度时,预警机作战效能评估指标Eeff_ind=0,即预警机无法有效遂行预警作战任务。
因此,最优预警机作战效能评估指标为
式中:Eeff_ind_1,Eeff_ind_2,…,Eeff_ind_C为第1,2,…,C次空域配置方案的预警机作战效能评估指标。Eeff_opt所对应的各预警机空域配置相关参数,构成了最优预警机空域配置方案Pfinal_opt:
式中:Eeff_opt为各参数的效能评估;LY_opt_i为第i架预警机直飞航线长度;WY_opt_i为转弯直径;αturn_opt_i为航线倾角;EY_opt_i为阵位坐标点。
最终得到图5 所示的预警机空域配置优化后的方案。
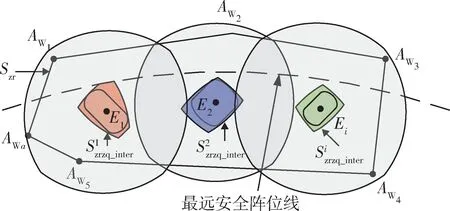
图5 最优预警机空域配置方案示意图Fig. 5 Optimal airspace configuration diagram of AWACS
3 基于遗传算法的空域配置优化
GA[13]能够较好地解决全局寻优问题,本文利用GA 求解区域防空作战预警机空域配置问题,流程如下:
step 1: 提取预警机责任区Szr的几何特征,确定最远安全阵位线,设置预警机安全巡逻空域。
step 2: 初始化预警机架数b,设置每架预警机航线倾角初始值αi、随机设定阵位中心坐标初始值(xyji,yyji),步进值分别设为αtum1,Δx1。
step 3: 设置GA 最大迭代次数genmax,种群数量为Sizepop,每个个体代表w1和w2的一组组合,采用实数形式进行编码。确定种群选择、交叉、变异方向以及确定交叉概率、变异概率等遗传参数。
step 4: 采用稳定覆盖度γcov_one为适应度函数,计算种群中的个体适应度。
step 5: 根据稳定覆盖度γcov_one数值对个体质量进行评价,采用轮盘赌机制选择较优个体,将部分较优个体复制到下一代种群中。
step 6: 对剩余个体进行选择、交叉、变异操作,如果进化代数达到终止代数N且满足稳定覆盖度评估准则时,停止进化并保留此时的预警机空域配置结果,否则b=b+ 1,转step 2。若未达到终止代数,转到step 4。
step 7: 根据最优个体得到w1和w2的最优组合,得到预警机空域配置初步方案,划分责任子区,并设置每架预警机巡逻航线可用空域范围。
step 8: 设置航线倾角步进值、阵位中心坐标步进值分别为αtum2,Δx2,并确定预警机直飞航线LYrr、转弯直径WYrr的初始值和步进值δdz_L、δdz_W。
step 9: 重新设置遗传算法各项参数,对责任区进行优化,迭代过程中若子代满足式(7),则保留此时的空域配置方案Peff_ind_i,并计算其作战效能评估指标Eeff_ind_i,若不满足则舍弃,最终得到C个满足条件的空域配置方案。
step 10: 选择作战效能最优的方案,其作战效能评估指标值记为Eeff_opt,对应的各预警机空域配置相关参数构成最优预警机空域配置方案Pfinal_opt。
step 11: 根据Eeff_opt所对应的各预警机直飞航线长度、转弯直径、航线倾角和阵位坐标点计算其巡逻航线上重要转弯点坐标,并绘制预警机空域配置部署图。
4 仿真分析
由于区域防空作战的责任区因敌情的变化而不同,责任区形状的不同会导致在进行空域配置过程中的参数设置略有不同。因此,本文以某特定作战环境下责任区的空域配置为例对上述配置方法进行仿真验证,仿真环境为pycharm2020。
4.1 参数设置
令预警机采用跑道型巡逻航线,最大探测距离= 400 km,最小转变直径= 15 km,最小直飞航线长度= 50 km,针对作战任务预期(可容忍度)的稳定覆盖度= 0.98。设置GA 最大迭代次数genmax= 300,种群数量为Sizepop= 30,确定种群选择、交叉、变异方向以及交叉概率f1= 0.9、变异概率f2= 0.1 等遗传参数。
设置预警机直飞航线长度、转弯直径、航线倾角和阵位坐标点的变化步进值,如表1 所示。

表1 预警机空域配置参数步进值设置Table 1 Step value setting of airspace configuration parameters of AWACS
不失一般性,随机生成的不规则责任区顶点坐标依次为(120,730),(920,950),(1 640,730),(1 710,340),(1 330,150),(1 150,270),(700,290),(430,160),(170,250)。
4.2 区域防空作战中预警机空域配置
4.2.1 责任子区划分
根据4.1 节的参数设置,利用遗传算法仿真得到预警机空域配置初步方案如图6 所示,此时可得γcov_one= 0.991 2,具体阵位方案见表2。
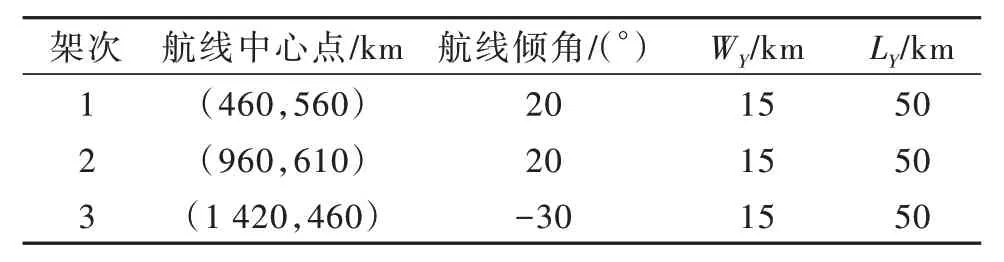
表2 预警机空域配置初步方案Table 2 Preliminary scheme for airspace configuration of AWACS
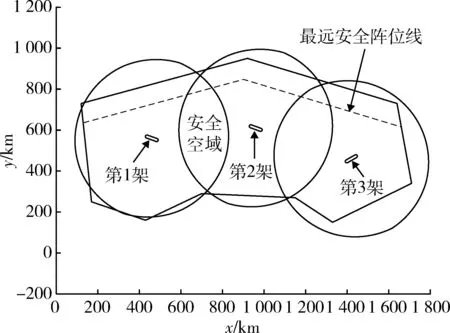
图6 预警机阵位配置示意图Fig. 6 Airspace configuration diagram of early warning aircrafts
由图6 可知,所有预警机的巡逻航线均处于安全空域内(最远安全阵位线以内的区域)。根据空域配置方法,将整个责任区划分为3 个责任子区,如图7 所示。
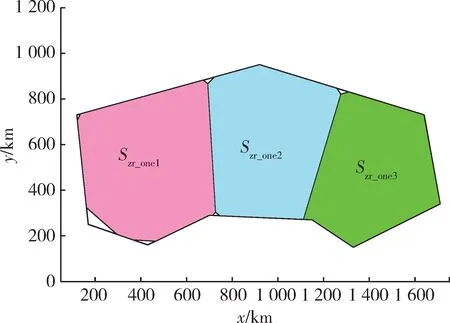
图7 责任子区划分图Fig. 7 Divided responsibility subarea diagram
4.2.2 可用空域设置
以图7 中3 个责任子区的各顶点为圆心,以为半径画圆,形成的交叠区在安全巡逻空域Saq_ky以内的部分即可视为每架预警机的可用空域范围,记为,最终得到3 个责任子区的可用空域范围如图8 所示。
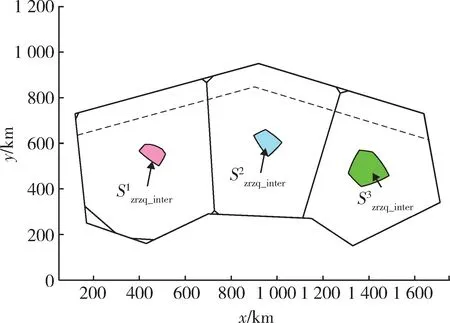
图8 各预警机可用空域分布图Fig. 8 Available airspace distribution diagram of each AWACS
4.2.3 预警机航线优化
适当调整遗传算法参数对预警机空域配置进行优化,设置预警机阵位坐标步进值Δx2= 1 km,航线倾角步进值αtum_2= 5°,其余参数不变。利用pycharm2020 仿真得到如图9 所示的航线优化结果,具体优化方案见表3。
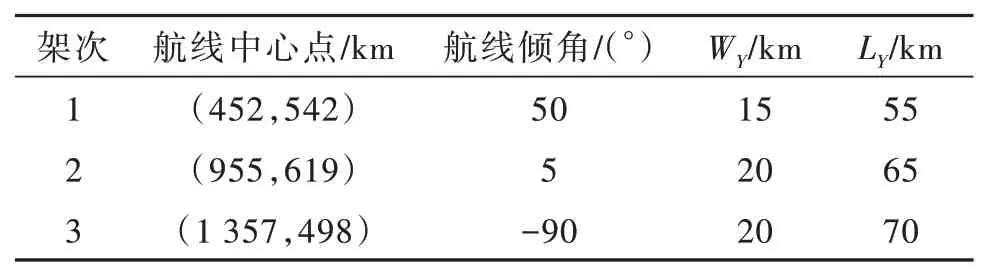
表3 预警机航线优化参数Table 3 Route optimization parameters of AWACS
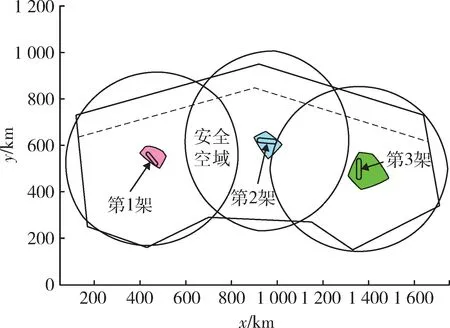
图9 各预警机航线优化图Fig. 9 Route optimization diagram of each AWACS
另外,得到作战效能Eeff_opt= 1.256,稳定覆盖度γcov_two_opt= 0.993 7,相较初步配置方案,预警机作战效能提升了25.6%,稳定覆盖度比第一阶段寻优提升了0.002 5,达到了预期作战目的,同时验证了遗传算法在解决该问题上的有效性。
4.3 统计分析
4.3.1 迭代次数与覆盖度的关系
如图10 所示,将4.1 节最大迭代次数设置为genmax= 800,其余参数不变,可得到仿真迭代次数与稳定覆盖度关系图,在迭代次数gen= 93 时γcov_one= 0.986 3,迭代次数gen= 800 时γcov_one=0.997 2,稳定覆盖度γcov_one只提高了0.010 9,显然在此次仿真中,当迭代次数不小于93 次,即可满足作战需求。
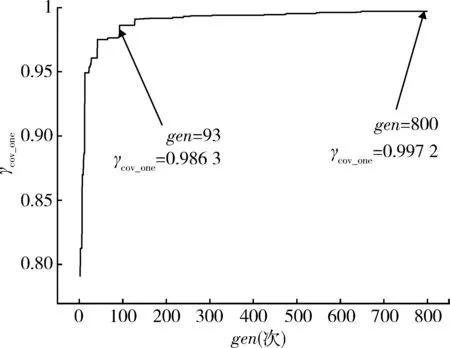
图10 仿真迭代次数与稳定覆盖度关系图Fig. 10 Simulation iteration times and coverage diagram
再分别令最大迭代次数genmax= 100 和genmax=800,且都进行N= 100次程序运行,进行仿真验证,得到迭代次数与稳定覆盖度关系图,如图11,12所示。
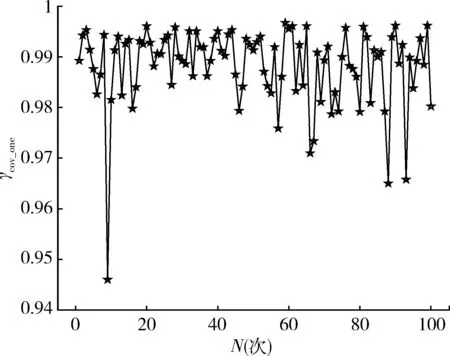
图11 仿真迭代次数为100 时的覆盖度图Fig. 11 Coverage diagram of simulation iteration times is 100
根据图11数据统计,在100次仿真中有88次稳定覆盖度γcov_one在0.98以上,γcov_one最小值为0.946,最大值为0.996 7,100次仿真γcov_one的平均值为0.988 2。
根据图12 数据统计,100 次仿真均满足稳定覆盖度γcov_one>0.98 的要求,γcov_one最小值为0.989,最大值为0.997 9,100 次仿真γcov_one的平均值为0.996 3。
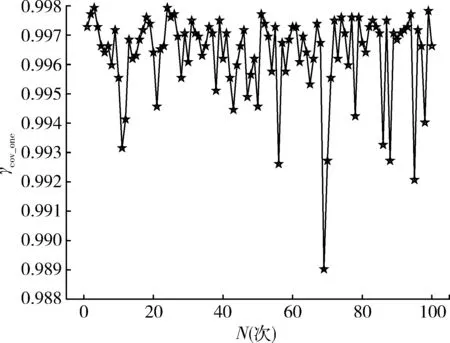
图12 仿真迭代次数为800 时的覆盖度图Fig. 12 Coverage diagram of simulation iteration times is 800
对运行时间进行统计,迭代次数与运行时间基本呈现线性对应关系,即genmax= 100 时所用时间为genmax= 800 所用时间的12.5%。
从以上统计分析可知,genmax= 800 得到的覆盖度完全符合作战容忍度对覆盖度要求,genmax= 100时,接近94%的概率能够满足覆盖度要求,从覆盖度角度考虑,genmax= 800 明显占优,但时效性较差,genmax= 100 覆盖度稍低,但是时效性好。因此,可根据不同时限需求,合理设置寻优次数上限,以满足相应的作战时效要求。
4.3.2 作战效能与覆盖度的关系
在算法程序运行100 次的过程中同时可得到每次配置优化后的作战效能图,如图13,14 所示。
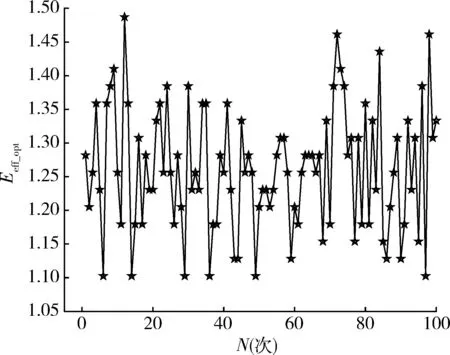
图13 仿真迭代次数为100 时的作战效能图Fig. 13 Operational effectiveness diagram of simulation iteration times is 100
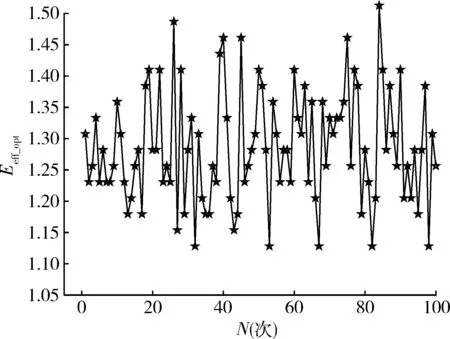
图14 仿真迭代次数为800 时的作战效能图Fig. 14 Operational effectiveness diagram of simulation iteration times is 800
经统计可知,genmax= 100 时,得到初步方案后,经过航线优化得到作战效能Eeff_opt的最小值为1.102 6,最大值为1.487 2,平均值为1.261。genmax= 800 时,Eeff_opt的最小值为1.128 2,最大值为1.512 8,平均值为1.286。
综合图11~14 可知,初始方案稳定覆盖度γcov_one值的大小与优化后的作战效能Eeff_opt值的大小无相关关系,即初级方案稳定覆盖度与优化后的作战效能属于弱耦合关系。
5 结束语
本文以区域防空作战为背景,针对不规则多边形责任区,通过稳定覆盖度和作战效能两级指标构建预警机巡逻空域配置模型,利用遗传算法对预警机空域配置问题进行求解,能够实现对预警机的阵位配置及航线优化。仿真结果构建的模型能够有效解决不规则责任区预警机空域配置问题,通过设置不同的迭代次数,可适用于在线规划或离线规划不同作战场景。
另外,值得注意的是,在进行责任子区分配时得到了图4 的预警机可用空域,其后文中采用跑道型巡逻航线进行分析,并不表明此问题中预警机仅可用跑道型航线,事实在可用空域范围内可采用任何一种巡逻航线样式。