接触网绝缘腕臂电气性能研究及优化
2024-03-16何廷豹
何廷豹
0 引言
当前我国电气化铁路采用钢柱或钢筋混凝土支柱悬挂接触网腕臂及绝缘子的形式,该形式腕臂装置及绝缘子检修工作量大,运维成本高,且绝缘子在重污、盐雾等环境中容易发生污闪,造成停电事故[1-3]。文献[4-6]介绍了玻璃纤维增强环氧树脂复合材料具有强度高、质量轻、耐腐蚀、绝缘性能强等特点,被广泛应用于航空航天、军事装备等领域,如将其应用于接触网腕臂中,可简化结构、降低施工安装难度,同时可减少绝缘子等悬挂零件的数量,大大减轻接触网检修维护工作量。本文研究复合材料在接触网腕臂中的应用前景及优势。
1 腕臂结构设计
现行电气化铁路接触网腕臂结构将金属腕臂和绝缘子合二为一,均采用绝缘材料,具体如图1所示,包括由绝缘材料制成的平腕臂、斜腕臂、腕臂支撑、定位管、定位管支撑、定位器、定位器底座。平腕臂和斜腕臂一端固定于金属承力索座,另一端固定于支柱,并采用腕臂支撑管进行结构加强;定位管与斜腕臂通过金属构件连接,另一端与定位管支撑通过金属构件连接,定位管支撑的另一端固定于承力索座,定位器安装于定位管上。

图1 腕臂结构
2 主要性能试验
由于接触网设备位于线路上方且无备用,其发生故障将直接影响电力机车的运行,采用的复合材料需具备延伸能力强、机械强度高、绝缘性能好、经济等特点。绝缘材料一般由基体、增强纤维和辅助材料三部分组成。常见的基体有环氧树脂、聚氨酯、酚醛树脂等,其中树脂基体具有良好的绝缘性能,兼具较强的耐腐蚀性。增强纤维使绝缘材料具有良好的力学特性,国内常用的增强纤维有玻璃纤维、碳纤维、芳纶纤维等[7]。结合市场调研情况,玻璃纤维增强环氧树脂复合材料更适合作为接触网腕臂装置绝缘材料的增强纤维,本文选择玻璃纤维增强环氧树脂复合材料展开接触网腕臂的设计。结合接触网腕臂的实际工况,依据相关标准试验方法测试了绝缘材料的基本物理性能、电气性能及机械性能。具体试验项目及测试结果如表1 所示。

表1 绝缘材料性能试验项目及测试结果
根据测试结果可以得到该绝缘材料具有如下特点:强度高、密度小,相较于传统金属腕臂,其具有质量轻、结构强度高的优点;具有较高的体积电阻率、较低的介质损耗因数及泄漏电流,绝缘性能优良,用于接触网腕臂可提高绝缘爬电距离及绝缘间隙距离。
3 腕臂电场特性分析
过度集中的电场强度及不均匀的电位分布是局部放电乃至产生电弧的根源[8-11],会缩短腕臂使用寿命,因此需要对绝缘材料腕臂的电场分布特性进行研究。本文利用COMSOL Multiphysics 多物理场仿真软件,基于绝缘材料腕臂实际安装形式下的电磁环境,建立三维计算模型计算分析腕臂的电位数值及电场分布。
3.1 计算原理
3.1.1 电位计算
由于绝缘材料腕臂长期工作在工频50 Hz 交流电压下,电压随时间变化缓慢,极间的绝缘距离比相应电磁波的波长(6 000 km)小得多,故对于复合材料腕臂,其在工频交流电压下任一瞬间的电场可以近似认为是稳定的,可按静电场来分析[12],静电场中电位ϕ的拉普拉斯方程表示为
边界条件如下:
式中:S1为强加电位面;S2为第二类边界面;S3为电位悬浮导体面;ε为介质的介电常数;U0为强加电位面S1上给定的电位函数;Fφ 为悬浮导体上的待求电位;r为从源点到场点的径向距离,即从电荷或电流产生的电磁场的中心到观察点的距离;z为从源点到场点的轴向距离,即从电荷或电流产生的电磁场的轴线到观察点的距离;n为一个整数,表示电势函数的角向模式,即电势函数在极坐标系下的角度变化形式。
电位在不同介质交界面上满足:
3.1.2 电晕起始场强计算
空气湿度对电晕放电的影响较为显著,空气湿度较高时,水分子附着在电极表面,使局部电场场强增大[13],电子运动过程中获得的能量増强,导致电晕电流升高,电晕起始电压降低[14]。接触网腕臂装置服役环境复杂,特别在高湿度地区,腕臂外表面局部场强和电晕起始场强会受到较大影响。为确保绝缘材料腕臂在高湿环境下的可靠性,对绝缘材料腕臂外表面最大场强进行分析计算。
导体电晕起始场强与导体表面粗糙度成线性关系[15],即
式中:Eoneset(m)和Eoneset(m= 1)分别为导体在不同表面粗糙度下和光滑情形下的电晕起始场强。假定饱和湿空气中导体表面不凝结水滴的情况下,水分子吸附导体表面形成水分子膜对导体的粗糙度无影响,则有
式(10)为正极性导体考虑了空气湿度修正的计算式,式中:δ为空气相对密度;m为表面粗糙度;r0为导体半径;H为相对湿度;P为气体压强;PW为饱和水蒸气分压。绝缘杆表面会吸附水分,使表面粗糙,从而使电晕起始场强降低。
在绝缘材料腕臂模型中,定位管内槽半径r0=3 cm,空气相对密度δ= 1。假设实际使用环境在海底隧道中,空气相对湿度较高,H= 80%,考虑水滴对腕臂表面粗糙度的影响,m=75%,饱和水蒸气分压PW= 611×107.5t/(273+t)Pa,t= 16 ℃。最终得到复合材料腕臂定位管的起晕场强Eonesetp=28.177 kV/cm。
由于在实际安装加工中,金属连接件与复合绝缘杆之间不能保证完全紧密贴合,局部常常有细小缝隙导致局部放电,且腕臂结构中存在曲率半径大于3 cm 的部位,在高湿环境中当场强远小于Eonesetp的情况下就会产生局部起晕。因此将整个腕臂外表面的最大场强Emax设定为18 kV/cm。
3.2 仿真模型
由于绝缘材料腕臂结构不具备轴对称性,利用SYS 软件建立接触网腕臂三维模型,采用COMSOL 进行三维-静电场-稳态场分析。为兼顾剖分精度和计算时间,根据剖分密度和剖分方法将腕臂和空气域剖分为两部分,依据建立的模型对赋予了介电常数参数的各部件进行网格划分,绝缘材料腕臂采用自由四面体网格剖分;对除绝缘材料腕臂外的空气域采用自由四面体网格剖分,网格剖分可视化结果见图2。模型边界条件设定为:空气域外表面、接触网支柱、大地等与带电体不直接关联的物质,其电压标定为0 V;高压端接触线设为绝缘材料腕臂工频运行电压的峰值标定为41.012 kV。

图2 网格剖分可视化结果
3.3 仿真结果分析
标准大气压下,仿真结果如图3 所示。结果表明,腕臂高电势主要集中在金属电极附近,离金属电极越近,电势越高。金属连接构件为等势体,其形状会影响整个腕臂的电位分布。金属连接件与绝缘材料绝缘杆的相交处电势变化迅速,标准大气压下,整个腕臂外表面的场强一般小于5 kV/cm,但由于绝缘材料定位管、绝缘材料定位器、金属连接件及空气域的相接处曲率半径大,造成场强过大,外表面最大场强为22.1 kV/cm,超过外表面最大场强预期阈值(18 kV/cm)。
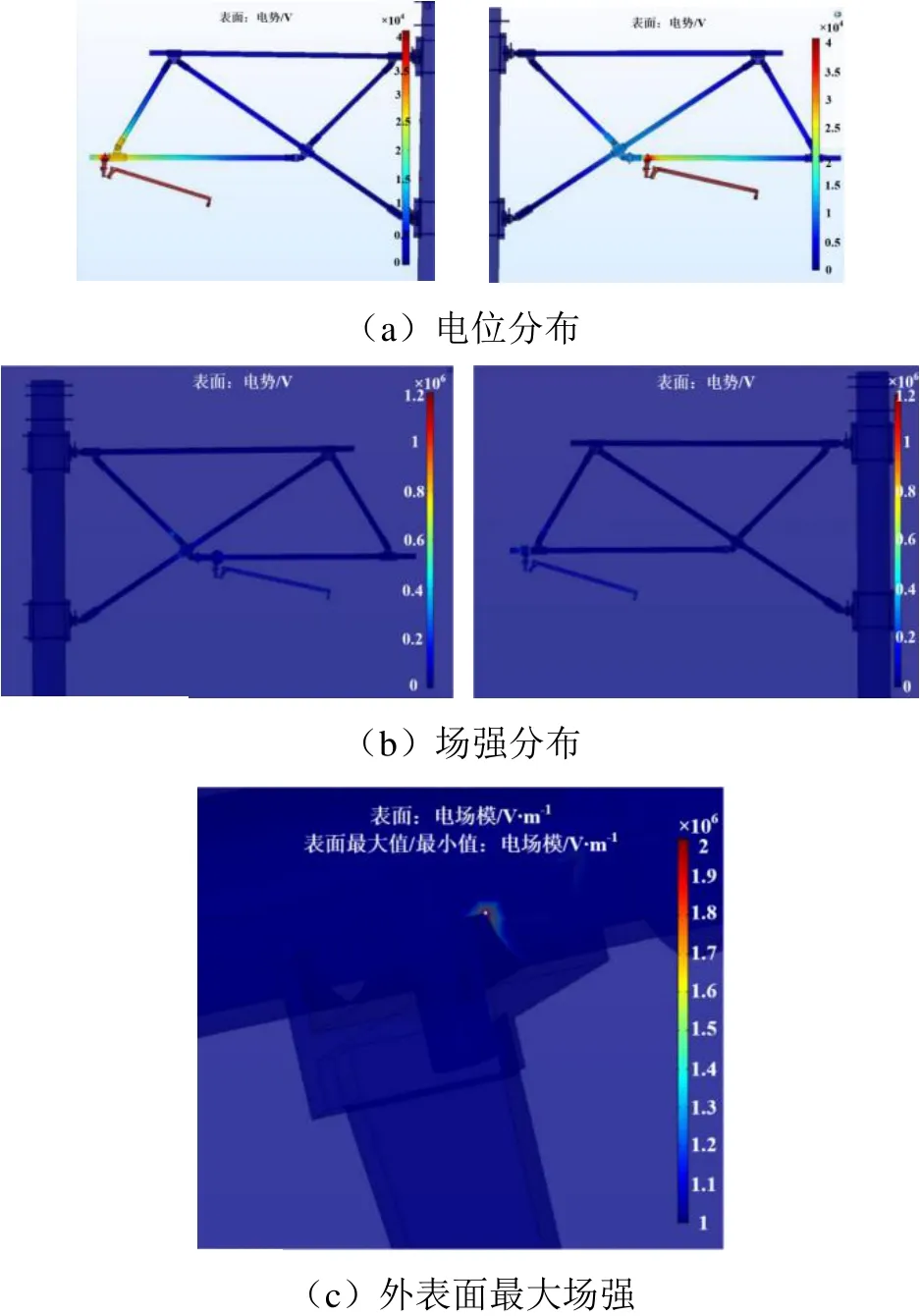
图3 绝缘材料腕臂电场分布云图
4 腕臂结构优化
由于绝缘材料腕臂定位器与定位管的连接处局部场强大于预期阈值18 kV/cm,因此需要对结构进行调整,采取添加均压罩的方法对电场分布进行优化。
4.1 均压罩设计
由于腕臂的正、反定位结构不同,在均压罩的设计上应有所不同,正定位结构的均压罩可设计为直径150 mm、厚度1.5 mm 的金属球壳,确保包裹住定位器与定位管的连接处。优化后的正定位结构局部视图见图4。

图4 优化后的正定位结构局部视图
反定位结构由于定位器与右端的金属连接件距离较近,球壳状的均压罩会使右端的金属连接件处电压抬升,进而提高金属连接件与定位管连接处的电场强度,在实际中可使用直径110 mm、长度80 mm、厚度1.5 mm 的金属圆柱壳型均压罩。优化后的反定位结构局部视图见图5。

图5 优化后的反定位结构局部视图
4.2 优化后的腕臂电场分布
将结构优化后的模型再次仿真,电位分布和电场强度如图6 所示。结果表明,优化后的支撑装置正、反定位的外表面电场强度相较于优化前均有所下降,整个外表面最大场强出现在定位线夹的外表面,为14.4 kV/cm,小于外表面最大场强预期阈值(18 kV/cm)。

图6 优化后的绝缘材料腕臂电场分布云图
5 结论
通过对电气化铁路接触网绝缘材料腕臂开展试验测试及仿真优化,论证了将绝缘材料应用于接触网腕臂的可行性,并给出了绝缘材料腕臂的设计思路,主要结论如下:
(1)玻璃纤维增强环氧树脂绝缘材料具有良好的机械性能及电气性能。相较传统金属腕臂,该腕臂具有质量轻、结构强度高、绝缘性能好等优势。
(2)在绝缘材料腕臂的结构中,由于绝缘材料本身绝缘性能较好,金属连接件和绝缘材料绝缘杆的相交处电势明显升高,离接触网高压端金属电极越近,其电势越高。
(3)通过设置均压罩可以有效改善整个腕臂的电位及电场分布,降低金属连接件和绝缘材料绝缘杆连接处的电场强度,从而降低出现局部放电、电弧的风险,提高绝缘材料腕臂的可靠性。
