接触网整体成型绝缘腕臂试验设计与研究*
2021-05-21彭立群林达文陈增红
彭立群,林达文,陈增红,王 进,陈 刚
(1 株洲时代新材料科技股份有限公司,湖南株洲412007;2 国家轨道交通高分子材料及制品质量监督检验中心(湖南),湖南株洲412007)
腕臂作为接触网系统中最关键的支撑部件,在接触网系统中发挥了重要的作用,传统的腕臂是由金属管和绝缘子构成,这种结构的腕臂制造成本高、安装维护不便、绝缘性能差。新型腕臂是一种由复合材料整体成型工艺实现,具有成本低、安装维护方便、绝缘性能好等优点。为了检验新型腕臂的静态、模态、疲劳和极限性能,以确保机车在高速运行状态下,弓网系统的安全性和良好的受流质量,因此非常有必要对腕臂的力学性能进行研究[1-3]。
1 腕 臂
新型腕臂通过复合材料整体成型工艺实现,由固定座、防护罩、支撑体组成,具有结构简单,质量轻,耐腐蚀,整体绝缘好等优点,如图1 所示。与传统金属腕臂相比,省去了绝缘子,安装维护更方便。
2 试 验
2.1 试验标准
腕臂试验主要参照原铁道行业标准TB/T 2074-2003《电气化铁路接触网零部件试验方法》、TB/T 1042-2003《铁路电力牵引供电工程施工质量验收标准》、铁路建设[2006]167 号《客运专线铁路电力牵引供电工程质量验收暂行标准》,具体按《某型接触网腕臂试验大纲》执行。

图1 腕臂结构
2.2 试验方案
腕臂力学性能试验方案分传统的单点法码加载试验和新型双向复合加载试验、新型单向疲劳试验。
单点法码加载试验是指设计规定质量的法码通过钢丝绳固定于腕臂的承载处,测试腕臂的静强度。双向复合加载试验是指通过设计两套手葫芦加载荷传感器的加力装置,同时对腕臂上下承力处正反两个方向施加拉力,对腕臂进行强度试验。单向疲劳试验是指对腕臂下部沿水平方向施加正反交变位移,测试腕臂的耐久性能。
单点法码加载:设计夹持装置固定腕臂上横梁承载处,分别沿水平方向和向下垂直方向悬挂同等质量的法码,并通过滑轮导向转向成水平拉力和垂向拉力,测试腕臂在双向承载条件下的静态强度,这种方式结构简单,试验成本低、满足小载荷静载试验要求,但安装不便,测试精度低,始终是一种恒定载荷加载,无法实现无级调节、载荷显示等功能,同时法码在吊装过程中存在较小的风险,如图2 所示。

图2 单点法码加载
双向复合加载:分正定位和反定位2 种加载方式,分别如图3(a)和图3(b)所示。指设计手葫芦、载荷传感器、专用工装串联形成加力装置,分别夹持或安装于被测试样的上、下2 个加力点,可同时或单独对试样施加静载荷,同时设计一种两半结构的夹块,通过螺栓锁紧试样,同时在试样的两端设计好预偏角度,通过加载连接与端部配合,形成带角度的加载装置,利用手葫芦和柔性吊带来解决试验涉及的难题,同时实现斜拉(带角度)加载试验。

图3 双向复合加载
单向疲劳试验:将腕臂固定于试验装置反力座,油缸尾部带铰链安装于试验平台的反力座,沿腕臂下端辅助承力索通过钢丝绳与油缸活塞杆连接,通过液压油缸施加拉伸位移,测试腕臂的弯曲耐久性,如图4 所示。

图4 疲劳试验
2.3 试验装置
试验装置主要由加力装置和采集系统两部分组成,如图5(a)和图5(b)所示。其中加力装置由固定装置和拉力装置组成,采集系统由载荷传感器和显示仪组成,如图5 所示。

图5 试验装置
固定装置:由固定座、安装座、销钉、腕臂组成,如图6 所示。其中固定座固定试验平台,在上端和下端设计有中心距U 型槽,通过安装座和销钉完成整个腕臂的端部固定,并在腕臂中间位置安装导向座,防止左右产生过大的横向位移。
加力装置:由腕臂、上拉力装置、反力座、下拉力装置组成,如图7 所示。其中上拉力装置设计一种两半结构的45°斜拉块,将水平和垂向双向载荷拟合成单一拉力加载。
下拉力装置设计有夹紧块和力臂装置,通过力臂将水平拉力转换成对腕臂下横梁的偏转力矩。
上拉力装置由夹块、挡块、侧板、显示仪、传感器、拉力环、手葫芦组成,如图8 所示。其中夹块夹持于上横梁,两端安装侧板通过挡块固定,传感器和手葫芦串联安装并固定于反力座。

图6 固定装置

图7 加力装置
下拉力装置由夹块、螺栓、力臂、固定销、传感器、显仪器、拉力环和手葫芦组成,如图9 所示。其中夹块固定于下横梁,通过下置力和手葫芦对腕臂施加偏转力矩,并利用传感器和显示仪记录载荷试验数据,利用百分表记录腕臂的整体变形。
2.4 分析计算
对腕臂进行静态和模态分析,获取腕臂的最大应力、变形以及固有频率。

图8 上拉力装置

图9 下拉力装置
静态分析:从图10 得知腕臂最大应力为130 MPa,产生在下横梁承载处;最大变形11.9 mm,产生在悬挂处最前端,其中最大应力小于允许值400 MPa,最大变形小于要求值25 mm,静态分析结果满足要求。
模态分析:为获取腕臂的固有频率和腕臂结构件的振型,对腕臂进行模态分析,图11(a)为腕臂的第1 阶振型,模态频率为14.2 Hz,腕臂产生Y方向偏摆;图11(b)为腕臂的第2 阶振型,模态频率为20 Hz,腕臂Z方向有较大偏摆;图11(c)为腕臂的第3 阶振型,模态频率为22 Hz,腕臂Y方向有较大偏摆;图11(d)为腕臂的第4 阶振型图,模态频率为46 Hz,腕臂下横梁Z方向有较大弯曲变形。结果表明腕臂最低固有频率大于接触网固有频率2 Hz,因此腕臂不会与接触网发生共振[4]。
3 结果与讨论
3.1 静强度试验
3.1.1 试验方法
正定位加载:设计将上横梁水平和垂直加载的4 kN 载荷拟合成45°的斜拉合力4.5 kN,同时与下置横梁水平拉力4.5 kN 协调加载,以4.5 kN/mm加载速度加载至4.5 kN,增加0.5 kN 保持10 s 并记录变形,记录0~4.5 kN 间的载荷与变形曲线。
反定位加载:试验原理与正定位一致,加载方向转180°,记录反向0~4.5 kN 间的载荷与变形曲线。

图11 腕臂四阶振型图
3.1.2 结果及分析
正定位加载属于腕臂外侧斜拉承载工况,此时腕臂上横梁承受向下弯曲和向外拉力,下横梁主要承受向外偏矩,使腕臂整体产生一种向下的变形,上、下横梁夹持点是试样最关键受力点,关键点的局部破坏会导致整个腕臂发生断裂或异常变形,从而失去支撑和悬挂作用,从试验加载过程来分析,随着载荷增加,腕臂变形增加,同时在加载初期除向下变形外,左右方向也有一定偏摆位移,随着载荷的断续增加,腕臂承载趋于稳定,后期的变形基本上是腕壁的弹性变形,且卸载后能恢复到自由状态。图12 给出了2 件腕臂正定位静强度载荷与变形曲线,其中加载到4.5 kN 时,1#和2#样品总变形分别为11.47 mm 和11.7 mm,综合试验数据和试验描述,表明该结构的腕臂具有较好的正定位静态强度特性,且样品生产和制作工艺稳定,质量稳定可靠。
反定位加载属于腕臂内侧斜拉承载工况,此时腕臂上横梁承受向下弯曲和向内拉力,加载载荷相同,只是方向相反,卸载后腕臂同样能恢复到自由状态。图13 给出了2 件腕臂反定位静强度载荷与变形曲线,其中加载到4.5 kN 时,1#和2#样品总变形分别为11.67 mm 和12.15 mm,综合试验数据和试验描述,表明该结构的腕臂具有较好的反定位静态强度特性,同时有限元分析得出腕臂整体变形为11.9 mm,因此分析结果与试验结果基本一致。
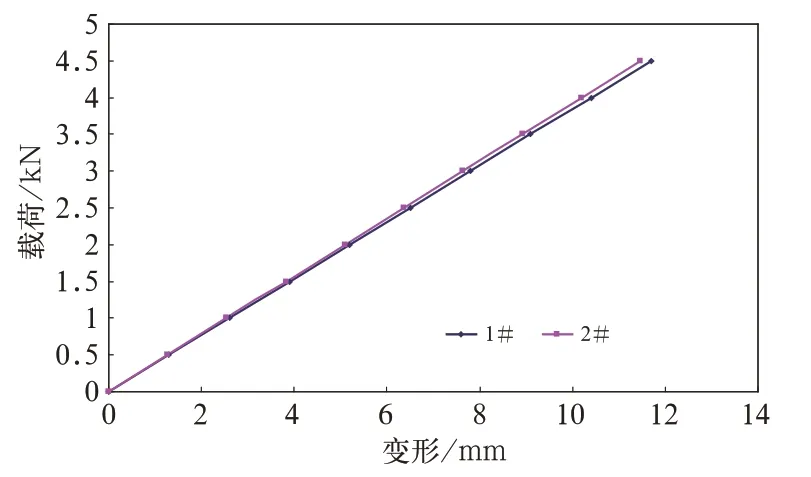
图12 腕臂正定位载荷与变形曲线

图13 腕臂反定位载荷与变形曲线
3.2 极限性能
3.2.1 试验方法
极限性能采用正定位加载进行,以6 kN/mm 加载速度对腕臂施加1.5 倍载荷6.75 kN,在6.75 kN保持30 s,观察腕臂是否破坏或出现其他异常。
3.2.2 结果及分析
极限性能是检验腕臂在超载条件下的承载特性。图14 给出了2 件腕臂极限静强度载荷与变形曲线,其中加载到6.75 kN 时,1#和2#样品变形分别为15.87 mm 和16.21 mm,且曲线载荷随位移增加而递增,样品未破坏和出现异常变形。这表明该结构腕臂具有较好的极限承载特性。
3.3 疲劳性能
3.3.1 试验方法
疲劳试验采用下拉力装置施加纯水平拉力进行试验,如图4 所示,水平载荷为(2.5±1.75)kN,频率2 Hz,循环加载50 万次,疲劳试验后腕臂局部不能出现断裂,整体不能出现破坏和其他异常。
3.3.2 结果及分析
疲劳试验是模拟腕臂安装于接触网系统中,由于风载、列车通过时的动载产生的交变动态载荷对腕臂耐久性的影响,判定腕臂疲劳性能最直接的参数主要是动载稳定性和疲劳后的状态。腕臂在疲劳载荷的作用下,加载稳定性较好,没有出现共振和大幅度偏摆现象,且疲劳试验后样品状态良好,夹持点和主要承载的上下支撑横梁,均未出现异常和塑性变形,这表明该结构腕臂具有较好的疲劳特性,试验结果和有限元分析结果基本一致,见表1。

图14 腕臂极限特性曲线

表1 疲劳试验数据
4 结束语
(1)分析了腕臂的承载工况,设计了新型静强度、极限和疲劳性能方案,并与传统试验方案进行分析比对,为腕臂及同类产品的试验设计提供参考。
(2)研究表明:新型方案结构设计合理、满足试验要求,更能准确反映出腕臂的力学性能,腕臂的静态、模态、极限和疲劳性能满足要求,且与分析结果基本一致。
