不同参数设置下直线型写字机器人笔迹特征
2024-03-13黄超晨
王 跃 杨 勇 黄超晨 李 跃
(西南政法大学刑事侦查学院 重庆 401120)
1 引言
随着科技的发展与生产生活的需求,为解决枯燥而繁重的重复抄写与填表等问题,人类在研究雕刻技术原理的基础上,发明了写字机器人。一方面,写字机器人的出现丰富了文字的形成方式,解决了人类所需的机械性誊写工作,给人们生活带来了便利;另一方面,随着写字机器人书写精度的提升,所写文字越来越接近自然人手写字迹,一些不法分子利用写字机器人摹仿他人签名笔迹实施侵权行为,严重侵害公民权利,同时也加大了笔迹鉴定的难度。因此,为提高笔迹鉴定的科学可靠性,维护当事人的合法权益及司法公正,对写字机器人的书写原理、书写方式、书写字迹的笔迹特征变化规律等进行深入研究势在必行。鉴于此,以写字机器人的不同参数设置如何影响笔迹特征表现为视角,通过实验研究总结机器人书写区别于自然人书写的独特稳定特征,并以一例虚假诉讼案件中的机器人书写字迹进行实践验证。
2 写字机器人书写运行原理
根据工作原理与制作工艺的不同可将写字机器人分为三种:直线型写字机器人、曲关节型写字机器人、平面关节型写字机器人。由于平面关节型与曲关节型写字机器人主要用于书画领域且占据市场份额相对较小,因而本实验只对直线型写字机器人的工作原理进行展开分析。
2.1 直线型写字机器人书写原理
直线型写字机器人因书写精度高、架构简单易操作等特点被广泛使用。在机械装置方面,直线型写字机器人采用直角坐标式面板,搭建X、Y轴,在步进电机(某些产品采用伺服电机)的驱动下,使控笔装置沿着X、Y运动轴分别做横向与纵向移动。同时为了实现抬笔与落笔动作,在X、Y轴的基础上搭建有Z轴,使直线型写字机器人的平面与空间移动都具备了操作可行性。在驱动程序方面,当书写人在软件内输入文字执行书写命令时,写字机器人会将文字转换为一种可识别的脉冲信号,X、Y、Z轴将在电机驱动作用力下开始有规律的移动并完成文字的书写[1]。
2.2 直线型写字机器人摹仿笔迹的原理
直线型写字机器人摹仿书写与正常书写相比,二者差异之处仅仅是输入文字来源的不同。正常书写情况下的输入文字来源于电子文档的导入或书写人自身在软件书写框内打字输入。而摹仿笔迹的输入文字来源于摹仿人经过对被摹仿字迹母本的矢量描绘所保存的.gap文件,或者通过保存摹仿字迹母本而建立形成的字库。除此之外,写字机器人将文字转换为脉冲信号和执行过程都与正常书写方式原理相同。写字机器人写字与摹仿原理如图1所示。
3 实验结果及讨论
3.1 实验设备与材料
3.1.1 实验设备
硬件:直线型写字机器人(广库,2023高速版)、Projectina文检仪、佳能 Lide220扫描仪。
软件:奎享字体V3.2、奎享雕刻3.7.0、PhotoshopCS6。
3.1.2 实验材料
本实验由60名志愿者在同等书写工具(晨光A4纸、晨光圆珠笔)、衬垫物及书写环境条件下书写自身签名,共收集60个自然人签名。60个签名均使用“奎享字体”软件中钢笔工具勾勒矢量路径并保存为.gap格式以备使用。为了排除人工勾勒文字矢量路径对文字特征带来的影响,本实验额外随机选用50个(字体为blood8-2)常用汉字,以在奎享雕刻软件中正常输入的方式进行书写,观察机器人书写字迹笔迹特征。
3.2 实验条件
以下各实验过程中,均是以衬垫物为10张A4纸、落笔位置参数为5的条件下进行。
3.3 结果与讨论
3.3.1 书写速度对笔迹特征的影响
写字机器人的书写速度与步进电机控制书写工具的移动速度有关,电机转速越快,书写工具移动速度越快,从而使得书写速度越快。需要说明的是,书写速度在实务中还有一种解释即单位时间内书写文字的个数,换言之,单位时间内书写字数越多则速度越快。这种说法也不无道理,但单位时间内书写字数的多少与文字笔画数量有关,因而使用此种概念定义书写速度是不准确的。本实验中所指的书写速度是指步进电机控制书写工具的移动速度。
为观察和掌握不同书写速度下笔迹特征的表现和变化,本实验使用“奎享雕刻”软件,将速度(单位:mm/min)依次调整为1000、2000、3000、5000、10000数值进行实验,得到字迹如图2所示。

图2 随着速度增大的笔迹特征变化
根据图2字迹发现,随着书写速度的逐步加快,文字笔压逐渐增大。究其原因在于写字机器人Z轴的变化由一个独立的步进电机控制,为了更好地调整书写工具与纸面的高度以实现抬笔和落笔动作,自然而然地要进行机械控笔。目前市场上大多采用双拉簧的方式控制书写笔的抬、落动作,当电机转速较低时,控笔组件能够实现对书写笔下落速度与抬起速度的精准控制;而当速度即电机转速增大时,拉簧的拉伸与复位速度跟不上电机的转速,从而使得控笔部件不能精准地调节落笔速度,致使落笔速度增大,最终导致笔压加重。实验过程中,在60个摹仿签名与50个字库汉字中均出现这一现象。
虽然书写速度加快使得单位时间内产生文字笔画数量增加,但需要注意的是,单个文字笔画之间仍保持相同的书写速度,甚至同一组文字都保持着相同的书写速度。
3.3.2 笔锋功能对笔迹特征的影响
笔锋是直线型写字机器人的新型功能,设计目的在于使书写形成的文字更自然,缩小机器与自然人之间的书写特征差距。笔锋的一般表现是文字某一笔画末端(即收笔部位)逐渐延长、变细。其形成原理是书写机器人在收到“启动笔锋”命令后,书写至文字特定笔画末端时根据其命令代码将原有笔画按特定角度延长,并且由于使用“启动笔锋”命令时机器人收笔方式改变,即收笔时不停顿而直接抬笔完成书写动作,导致笔画收笔处笔痕变窄且呈现尖锐形态。笔锋的设置参数范围为0-99,数值越大,文字笔锋特征越明显。本实验将笔锋参数分别设置为1-10、2-10、3-30、4-40、5-50、6-60、7-70、8-80、9-90,得到如图3、图4所示字迹。

图3 “刑”字笔锋随参数变化

图4 “庭”字笔锋随参数变化
实验发现,除了在文字横画与竖画的基础上延长笔画之外,写字机器人的文字笔锋功能大体可以分为两种方法类型,即笔画回折与笔画延长。笔画回折是在文字原有的笔画上加入勾画,随着笔锋参数的加大,回勾笔画长度也会逐渐增大,如图5所示。笔画延长即在文字原有的笔画之上进行延长,一般出现在“撇”“捺”笔画中。随着笔锋参数的加大,笔画长度也会逐渐增大。
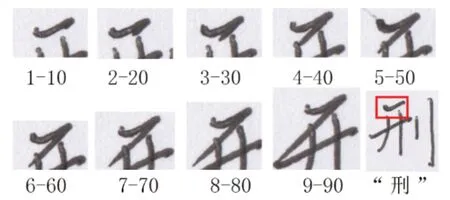
图5 笔锋回勾长度变化
相较于笔画回折方式,通过笔画延长加入笔锋的方式,其书写字迹出现较为明显的笔迹特征即笔压突变现象,如图6所示。从图6中可以看出,在“庭”字笔锋处可以看到明显的笔压变化,其形成原理为笔锋的加入与文字原有笔画的书写为独立的两套编码,当启动笔锋功能时,程序将自动识别文字各个笔画,随后将笔锋“附加”在原有笔画上,因而在当加入笔锋特征时,同一笔画线条可看到明显的“笔压突变”痕迹。

图6 “笔压突变”痕迹
值得注意的是,使用钢笔工具勾勒出签名的矢量路径进行写字输出时,因输入文字并不是来源于字库,所以无法加入笔锋特征。本实验的60个矢量签名(格式为.gap)在启动笔锋功能设置时均没有出现笔锋特征。在另50个源自字库的汉字中,共34个汉字出现笔锋特征且出现位置不一。如图3所示,9-90的参数下“刑”字竖撇画上笔锋特征并没有稳定出现,因而笔锋特征的出现位置和频率具有随机性。
3.3.3 字体、笔画变形对笔迹特征的影响
在“奎享雕刻”中,变形包括字体变形与笔画变形。字体变形包含字的大小、字间距、字倾斜、水平与垂直文字随机拉伸等几个功能。除文字随机拉伸功能之外,其余功能并不会改变文字固定结构与搭配比例。文字随机拉伸功能可以改变文字笔画的长度与搭配比例且暂时无规律可循,拉伸范围为50%~150%,范围越大,笔画的长度与搭配比例变形越明显,如图7所示。这一功能打破了写字机器人书写同一文字能完全重合的特点[2],使得写字机器人书写形成的字迹变化多端而更接近于人类书写文字,以至于鉴定人难以找到或确认具体的摹仿母本。

图7 同一文字随机拉伸
笔画变形包括角度强度与长度强度两个参数,即笔画角度变形与笔画长度变形。而在“奎享雕刻”中单独使用长度强度功能并不能使文字产生变化,因而要将“角度强度”和“长度强度”结合使用。笔画角度强度主要是对文字单个笔画的角度进行调整而不改变笔画长度,这一功能可改变文字笔画之间的搭配位置关系。笔画长度强度是对文字笔画的长短进行调整,能够改变文字笔画之间的搭配比例。笔画变形功能的出现使得文字的搭配位置及比例能按照个人意图随机改变。本实验经过对笔画变形的参数调整,发现角度强度与长度强度参数在0~30%时,文字笔画特征并无明显变化;将参数调整至30%~60%时,文字原有搭配位置与比例关系发生改变但并非发生剧烈形变;将参数调整至60%~100%时,文字搭配组件或单个笔画发生剧烈形变,导致文字严重变形。在参数调整至30%~60%的实验中发现,某些文字出现了明显的机械误差,如笔画错位、单个笔画或部件控笔不精准,导致文字整体的书写水平与文字局部构件书写水平不一致,如图8所示。
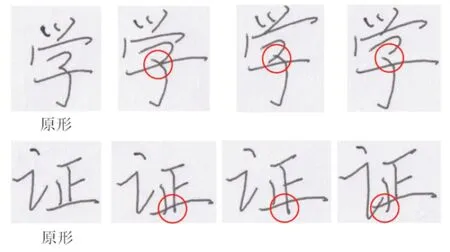
图8 文字笔画错位
与笔锋特征相似,笔画变形功能只对以字库方式输入的文字有效,对于导入的矢量签名或图形不能进行笔画变形,因而60个矢量签名(格式为.gap)在启动变形功能时均没有出现笔画变形。而在50个字库汉字中,有43个汉字出现了不同程度的笔画错位现象。
3.3.4 执笔角度对笔迹特征的影响
执笔角度是指笔与纸面形成夹角的大小。为了满足更多书写要求,市面上写字机器人的控笔部件都是可以调整执笔角度的,但在一般条件下,写字机器人都是以书写笔垂直的方式进行书写。为了求证执笔角度改变对机器人书写字迹笔迹特征的变化,本实验在书写笔与纸面夹角为90度(也即通常的垂直书写)与45度的条件下分别书写字迹后进行观察发现:执笔角度的改变并未对笔迹的一般特征,如搭配比例、字的大小、字的倾斜等产生影响,而对笔压、笔痕等特征影响较为明显。将两种执笔角度下形成笔迹的笔痕进行比较发现:与执笔角度90度相比,在执笔角度为45度时,字迹笔画起笔处因书写笔垂直纸面形成的“顿压”痕迹并不明显。在落笔位置参数相同的情况下,执笔角度为45度时,字迹整体笔压较轻,如图9所示。在60个矢量签名和50个字库汉字中,分别有57个签名、48个字库汉字均出现笔压变化现象。

图9 因笔垂直纸面而形成的“顿压”痕迹
另外,在执笔角度为45度的多次实验中发现,在使用某一品牌圆珠笔(晨光k-35,0.5mm圆珠笔)的情况下,字迹笔痕中会出现双凹痕且在文字横画中出现频率较为稳定,如图10所示。究其原因是因为执笔角度的改变,尤其在书写横向笔画时,造成滚珠部分表面与球座边缘共同接触纸面造成纸张纤维破坏,从而形成两条凹痕[3]。需要说明的是,并不是所有的圆珠笔都会出现这一特征,因而这一特征仅可作为鉴定辅助特征。
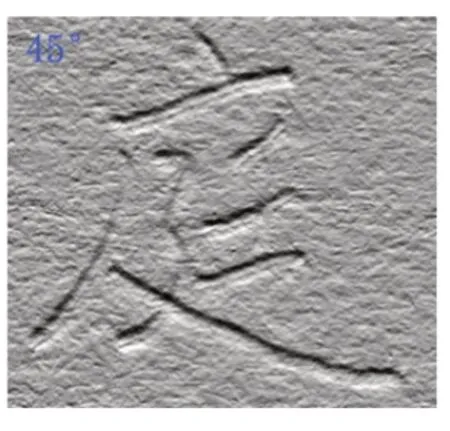
图10 横画双凹痕
3.3.5 字号大小对笔迹特征的影响
字的大小特征是指在硬笔书写文字的整体大小特点。字的大小特征只有在特别大或特别小时才具有一定的鉴定价值,因而在手写字迹笔迹鉴定中鉴定价值并不高。然而,写字机器人的书写动作是由计算机代码驱动步进电机而完成的,其书写精度的高低与字体大小相关联。一般来说,字号越小,文字细节特征丢失越多;字号越大,文字细节特征保留越完整。为验证以上规律的真实性,本实验将同一文字设置为不同字号大小,分别为100、150、200、250、300、350、400(奎享雕刻字号大小)进行实验,得到字迹如图11、图12所示。

图11 “起”字号逐渐增大
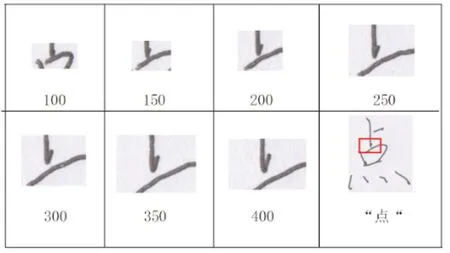
图12 “点”字号逐渐增大
从图11、图12字迹可以看出:当字号逐渐增大时,写字机器人书写文字的细节特征越完整,如“起”字横画的横折特征;“点”字“占”部竖画的收笔方向特征等。同时,字号的增大也使文字中的机器人书写痕迹特征反映更加明显,如长笔画中的机械抖动、非正常的收笔动作等特征。在60个矢量签名与50个字库汉字中均出现随着字号的大小变化,笔迹细节特征增补或缺失的现象。
4 直线型写字机器人书写字迹笔迹特征分析
通过对机器人摹仿字迹、写字机器人各参数调整情况下书写字迹笔迹特征规律的研究,发现机器人书写字迹与自然人手写字迹在笔画搭配比例、运笔、连笔、笔力、笔痕、笔顺等笔迹特征方面均存在显著差异。因此,需要参照自然人书写字迹的常见特征,对机器人参数调整条件下可能出现的机器书写特征进行总结,以提高笔迹鉴定的正确性。
4.1 笔画搭配特征
笔画搭配特征包括搭配位置特征与搭配比例特征。不管使用何种摹仿手法,最终输出的文字搭配特征基本与被摹仿字迹无差别[4]。需要注意的是,由于笔画变形与笔锋功能的存在,摹仿者可能对文字某些笔画角度与长度进行调整,从而使得摹仿字迹与摹本之间不能完全重合。因此,并不是所有的机器人摹仿字迹案件都能找到原始的母本,同时也会因造假者隐藏摹仿母本而难以发现原始摹本。
4.2 运笔特征
对于机器人书写字迹运笔特征的分析,依旧可以按照传统起笔、行笔和收笔三个阶段进行。起笔时,因写字机器人在接触纸面时会有一个极短暂的停顿,且书写笔大多垂直于纸面,因而在起笔的位置会留下一个明显的笔尖顿压纸张的凹陷痕迹。顿压凹陷痕迹是由写字机特殊的书写动作形成的,其能否出现不受书写笔种类的影响。但是使用不同种类的书写笔书写时,笔画线条起笔处的表象特征却有所差别。对现有研究成果总结发现,机器人书写字迹起笔处痕迹形态主要有“圆点墨迹”“不规则墨迹堆叠”“墨水浓淡不均”“不规则露白”等四种[5],但因不同笔芯单位时间内出墨量有所差异,有时在起笔处也可能不存在以上所描述的四种形态特征。因此,鉴定人在观察笔迹特征时,不能因为起笔处没有出现明显的“圆点墨迹”“不规则墨迹堆叠”“墨水浓淡不均”“不规则露白”等痕迹就排除机器人书写字迹的可能,而是需要进一步确定字迹是否存在因书写笔垂直顿压所形成的“凹陷”痕迹。
在行笔时,因写字机器人步进电机的转动而引起书写笔的抖动,从而造成文字笔画中出现异于自然人笔迹抖动的“机械抖动”[6]。在收笔时,需要考虑是否启动了笔锋功能。若不启动笔锋功能,笔画宽度与行笔过程相比并无明显差异,但因写字机书写动作的结束仍有较为明显的短暂性停顿,因而在笔画末端会出现颜色较深的墨点;若启动笔锋功能,笔画的长度与收笔的角度会因为笔锋的存在而发生变化,某些笔画的末端形态也会因启动笔锋时写字机抬笔方式的改变而呈现出尖锐形态。
需要说明的是,写字机器人的运笔方向跟文字形成的矢量路径相关。在摹仿过程中如文字个别笔画的矢量路径描绘方向与自然人书写方向相反,则会出现运笔方向与自然人书写方向相反的“倒运笔”现象,如图13所示。因此,当文字笔画中出现“倒运笔”现象时,鉴定人可综合其他方面考虑检材字迹是否为机器人书写形成。
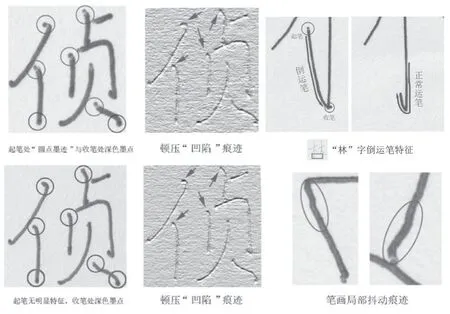
图13 运笔时可能出现的特征
4.3 连笔特征
连笔特征是指两个或两个以上笔画连写时所表现出的运笔特征。写字机器人因自身结构的限制,书写动作的完成需经历落笔、行笔、收笔三个过程,这就导致写字机器人一个书写动作的单次运行只能形成一个独立的笔画或独立的构字部件。虽然可能会因为摹仿人描绘字迹矢量路径时,将多个笔画一次性连续描绘而形成独立的矢量路径,最终导致机器人一次性书写出由多个笔画构成的文字组成部件,但多个笔画组成的构字部件也是机器人一次性书写完成的,各个笔画之间并不存在笔画中断的痕迹。因此,机器人书写字迹并不存在真正意义上的连笔特征。写字机器人的此种书写方式不受参数设置的影响。
自然人因文字笔画之间书写速度的不同会出现明显的连笔特征,但因机器人书写字迹在各笔画之间书写速度、笔压、笔力都保持相对稳定,因而在前一笔画收笔与后一笔画起笔之间并不存在“意连特征”,换言之,在连续书写的两个笔画中,前一个笔画末尾的收笔与后一个笔画的起笔之间无照应关系。这也是机器人书写字迹区别于自然人字迹的重要特征。
4.4 笔力特征
因现代写字机器人Z轴控笔部件只能实现简单的抬、落笔动作,文字的形成主要依靠X、Y轴步进电机有规律地拖拉书写笔而实现,因而书写形成的文字笔力平缓。文字笔力平缓是机器人书写字迹与自然人书写字迹最大的区别,也是机器人书写字迹独有的特征。当加入笔锋时,因部分笔锋的形成是在原有文字笔画的基础上将笔画继续延长,因此,鉴定人在显微镜下能清晰地观察到正常笔画与笔锋连接处笔压突变的现象。
当文字字号过小时,由于文字笔画长度的限制,写字机器人会将笔画的“回折”收笔动作简化或去除,导致文字个别笔画末端出现小黑点,如图14所示。鉴定人需要明确此种“小黑点”并不是机器人笔力加重的现象,而是写字机器人简化收笔动作的结果。

图14 机器人书写的简化收笔动作特征
4.5 笔顺特征
机器人书写字迹的笔顺源于导入软件时文字自身所载的矢量笔画路径。写字机器人原始书写字体有两处来源,分别是软件自带字库字体和书写人自建字体。两种字体的形成都需要自然人的书写录入,因而文字的笔顺在字体建立之初就被固定。需要注意的是,在摹仿过程中,摹仿者可能会忽略被摹仿母本字迹笔顺而无意识地根据自身书写习惯的笔顺进行矢量路径的描绘,造成摹仿字迹与被摹仿母本字迹笔顺不一致,需鉴定人更为细致地观察。
在机器人摹仿字迹的形成过程中,个别文字某些部件的笔顺不易被摹仿[7]。摹仿者可能会面临一种情况,即被摹仿字迹笔画绕写复杂而导致摹仿者不能全面掌握被摹仿字迹的笔顺造成摹仿困难。出现此种现象,多因摹仿者为了使摹仿字迹更接近被摹仿字迹,往往会在笔顺不明部位进行多次折绕或重叠书写。因此,鉴定人在进行机器人书写字迹笔迹鉴定时,对于复杂的笔画绕写部位要重点观察,以探明是否存在胡乱添写的现象。
4.6 笔痕特征
自然人书写时因个人书写动力定型的建立,书写时势必会打破规范文字的结构而形成个人独有的书写特点,从而造成文字笔力、笔压的变化,因而自然人书写形成的文字各笔画之间的笔痕形态各有差异。但是,由于写字机器人无思维意识,其进行书写的原理为机械地执行书写命令代码,在各参数恒定的情况下,写字机器人一次性所写字迹的笔压恒定,笔力也呈现均匀状态。因此,机器人书写字迹的笔痕也具有其规律性,即各笔画痕迹的形态、宽度与深度相似。书写形成的文字各笔画之间的笔痕形态、宽度与深度相似,即是机器人书写字迹的独有特征。虽然随着书写速度的提高,机器人书写字迹笔压会逐渐增大,但在同一次书写过程中各文字、各笔画笔压恒定,笔痕也存在相似性。机器人字迹笔痕与自然人字迹笔痕如图15所示。

图15 机器人字迹笔痕(左)与自然人字迹笔痕(右)
5 实务案例验证
5.1 案情介绍
在某股权转让纠纷、合同纠纷等系列案件中,原告以自然人或公司身份在多个民事案件中起诉王某,并向法院提交了其持有的“王某签名”的相关检材及样本原件。在诉讼期间,原告私下委托A鉴定机构进行鉴定,得出的鉴定意见是王某书写,但诉讼中原告从未向法院和被告披露过单方委托事实及鉴定意见。随后,法院正式委托A鉴定机构进行鉴定,但在历经漫长的诉讼周期后,诉讼中原告单方委托A鉴定机构进行鉴定的事实逐渐暴露,法院的鉴定委托被迫终止,原告撤诉。
被告认为原告涉嫌虚假诉讼、虚假鉴定,为揭示原告持有检材的虚假性,在原告撤诉后,被告单方委托某权威鉴定机构B进行鉴定。B鉴定机构认定多份检材上“王某”签名不是王某本人书写,且发现原告持有的多份检材上“王某”签名与原告持有的样本上“王某”签名高度相似,也即原告提交的检材字迹事实上仿写自原告提交的部分样本。被告遂委托资深笔迹鉴定专家对上述检材、样本及鉴定报告进行审查,专家进一步指出检材字迹不仅是仿写字迹,而且是机器人仿写形成。
5.2 鉴定过程与技术要点
B鉴定机构的鉴定意见是相关检材上“王某”署名字迹不是王某本人书写,其鉴定依据主要是文字笔画运笔连笔是否流畅、笔力是否存在轻重缓急变化,以及检材与样本字迹几近重合等特征得出摹仿事实。随后,专家辅助人对B鉴定机构鉴定意见书进行审查,并对检材及样本进行全面深入的系统检验,认为B鉴定机构的否定同一鉴定意见符合客观事实,但分析论证、揭示造假真相还不够深刻。因为经专家辅助人进一步检验发现,检材字迹完全符合机器人书写字迹的典型特征:在运笔方面,“王某”字迹起笔处存在由于写字机垂直顿压形成的“圆形墨点”痕迹;在行笔过程中,笔画线条出现局部抖动痕迹,如图16所示;在笔力方面,“王某”字迹笔力均匀无变化,无自然人手写字迹表现的抑扬顿挫之感;在连笔方面,“王某”字迹前一个笔画末尾的收笔与后一个笔画的起笔之间无照应关系,如图17所示;在笔画粗细方面,“王某”字迹笔画基本上粗细一致。

图16 起笔处“圆形墨点”痕迹与抖动痕迹
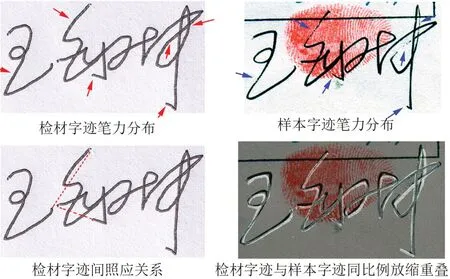
图17 检材字迹与样本字迹笔力对比和同比例缩放重叠
综合以上种种笔迹特征,专家辅助人努力寻求“王某”摹仿母本,在原告提交的众多样本材料之中,竟然暗藏着与检材字迹对应的仿写摹本,进一步印证了专家辅助人对于检材字迹为“机器人书写字迹”的性质判断,揭示了机器人书写字迹与仿写摹本间的对应关系。正是由于专家辅助人发现了造假者持有的检材与样本间的摹仿对应关系,以及检材字迹为机器人书写的本质,最终使得原告知难而退并撤诉。此案例也显现出写字机器人笔迹特征研究的重大理论与实践价值。
5.3 检案心得
机器人书写字迹与自然人手写字迹相比有着自身明显的笔迹特征,主要表现在笔画搭配比例、运笔、笔力、笔痕、笔顺、笔速等方面。当鉴定人发现检材字迹存有明显的传统摹仿痕迹,如笔力均匀、运笔生涩、连笔绕笔异常时,要进一步细心观察检材字迹各方面的特征,直至确定字迹的形成方式。在出具鉴定意见时,既要考虑鉴定结果的确定性与鉴定风险的关系,亦要考虑鉴定意见作为法定证据在揭露客观事实方面的作用和证明力。例如,本案中B鉴定机构虽出具了否定同一鉴定意见,说明了A鉴定意见的错误,但揭露客观真相不彻底,使得法官内心对于鉴定意见的科学可靠性不能达到百分之百的确信,易影响鉴定意见在整个案件中的证明力。因此,鉴定人在实施鉴定时不仅要仔细观察检材字迹所表现的笔迹特征,在满足一定条件下,更要确定检材字迹的性质(自然人仿写/机器仿写),并尽可能地发现摹仿母本以印证仿写事实,进一步提高鉴定意见的科学可靠性,推动精密司法,促进公正司法。
6 结语
直线型写字机器人的笔迹特征因各种参数调整而会发生不同的变化。受制于目前工业技术的局限性与直线型写字机器人自身的机械结构特征,其输出的文字在运笔、笔力、笔压、连笔和笔痕方面有着自身固有的笔迹特征,因而可将其视为区别于自然人手写字迹的重要特征。
此外,本实验研究也存有一些不足,例如并未涉及有些参数调整引起的机器人书写字迹笔迹特征变化实验,如落笔位置、书写工具、衬垫物等参数。全面了解并掌握机器人书写字迹笔迹特征对于降低笔迹鉴定错案风险,促进司法公正具有实质性的推动作用。未来学界不仅要熟知各种参数变化下机器人书写字迹所载的笔迹特征,更要通过实验进一步精准得出不同型号的直线型写字机器人与自然人手写字迹之间笔迹特征的异同,从而总结出直线型写字机器人独有的笔迹特征,进一步提高笔迹鉴定的科学可靠性。
