基于知识模糊迁徙的城市污水处理膜污染决策
2024-03-10陈行行韩红桂
何 政, 赵 楠, 李 杰, 陈行行, 阜 崴, 顾 剑, 韩红桂, 刘 峥
(1.北京城市排水集团有限责任公司, 北京 100044; 2.北京北排水环境发展有限公司, 北京 100044;3.北京工业大学信息学部,北京 100124; 4.北京工业大学计算智能与智能系统北京市重点实验室, 北京 100124)
随着膜技术的不断发展与成熟,膜生物反应器在城市污水处理过程中得到了广泛应用[1-2]。然而,膜污染是膜生物反应器在污水处理过程中最为棘手的问题,一旦发生,将会导致运行成本增加、膜生物反应器寿命减少,甚至整个污水处理运行过程瘫痪,阻碍膜生物反应器平稳运行[3-4]。因此,为了降低膜污染的发生率,确保污水处理过程的长期稳定运行,对膜污染问题进行准确决策至关重要[5-6]。
近年来,数据驱动的膜污染决策方法受到专家学者的广泛关注[7-8],其方法主要是通过过程数据分析关键参数与膜污染之间的关系,达到决策的目的[9-10]。例如,Kim等[11]通过基于递归最小二乘算法的决策方法研究污垢模型、污垢指标和膜污染之间的关系,将混合液悬浮固体质量浓度、胞外聚合物质量浓度、电动电位等作为模型输入,将膜通量和其恢复率作为模型输出。实验结果表明该方法可以根据膜污染的程度确定化学清洗的时间间隔。Zhao等[12]提出了一种基于神经网络的膜污染决策方法,通过搭建膜通量、回收率与膜污染程度之间的关系设置阈值来确定清洗周期和清洗方法,为操作人员提供决策意见。实验结果表明,该决策方法能够获得较为准确的决策意见,保证膜生物反应器的正常运行。Han等[13]建立了一种基于递归径向基神经网络的膜污染决策模型,利用偏最小二乘算法选取与膜污染相关的特征变量,并将其作为模型输入,然后,通过递归径向基神经网络完成膜透水率软测量,并结合多个二元分类器对膜污染进行等级划分,提供膜污染抑制策略。实验结果表明,该模型具有较好的决策精度,能够有效减少膜污染的发生。以上数据驱动的方法均通过实际运行数据直接或者间接分析关键水质参数特征及运行状态与膜污染之间的关系,从而实现膜污染的抑制决策[14-15]。然而,在实际的城市污水处理厂运行过程中会发生数据丢失以及数据不足等情况,通过数据驱动等技术进行状态分析难以获得准确的膜污染抑制决策信息[16-17]。因此,数据驱动的决策方法难以满足膜污染治理的需求。
为了实现膜污染准确决策,便于操作人员采取抑制措施,越来越多的研究者采用基于操作经验以及专家知识的方法建立膜污染决策模型[18-19]。一般来说,在线物理清洗的时间周期为3~5 d,化学清洗的时间周期为5~7 d,离线清洗的时间周期为3~6个月[20-21]。基于以上经验知识,Zhao等[22]通过观察膜运行状态,针对不同膜污染情况选择膜的清洗周期以及调整操作方案。实验结果表明,该方法能够获取准确的抑制方案,膜生物反应器的性能可以得到恢复。Zhou等[23]设计了基于专家系统的膜污染智能决策系统,利用模糊推理进行运行知识的表达,完成污水处理过程中不同故障与解决方法的匹配,实现污水处理膜污染的准确决策,有效改善与抑制膜污染。Chen等[24]提出一种膜污染模糊决策方法,利用模糊规则完成经验知识表达,通过推理机归纳经验知识,完成膜污染与清洗方案的模糊匹配,以实现膜深度清洗。实验结果表明,该模糊决策方法能够抑制膜污染的恶化,保障膜生物反应器的性能。然而,以上知识驱动的膜污染决策方法存在知识获取以及知识推理难以实现的问题,导致决策结果不准而损坏膜,从而增加运行成本以及能耗[25-26]。
为了实现对于城市污水处理膜污染快速、高精度的决策,本文提出一种基于数据和知识驱动的区间二型模糊神经网络(data-knowledge-driven interval type-2 fuzzy neural network, DK-IT2FNN)的膜污染智能决策模型。该模型具有如下特点:首先,通过模糊规则的形式实现膜污染决策知识的表达;其次,提出一种知识重构机制(knowledge reconstruction mechanism, KRM),采用知识迁徙的方法完成决策知识重构;最后,利用模糊规则设计模型参数,采用迁徙梯度下降算法动态调整网络权值,并将提出的膜污染决策模型应用于实际污水处理过程中,实验结果验证了该模型的有效性。
1 膜污染知识表达
城市污水处理过程中蕴含着丰富的运行知识[27-28]和操作经验,其对于膜污染的抑制决策具有指导意义。结合城市污水处理厂的膜系统运行情况,本文对膜污染决策方法进行了分类,具体类别如表1所示。

表1 膜污染决策方法
根据膜污染过程变量的历史数据和实际运行经验,将其定义为源场景,并利用模糊规则表示以上信息,即
(1)

(2)

(3)
(4)

根据以上描述,膜污染决策的模糊规则如表2所示。

表2 膜污染决策模型的模糊规则
2 KRM
为了提高源场景中知识的有效性,在数据量不足的条件下对源场景中知识进行重新评价和选择[29-30],以获取有效的知识,完成对膜污染的精确决策。因此,本文提出一种KRM方法,可以提高知识的多样性和弥补数据不足的缺点,具体步骤如下。
知识采样过程可表示为
Kp(t)=KS(υ)+δp(t)
(5)
式中:Kp(t)为第p条知识样本;KS(υ)为源场景知识,υ为源场景的迭代次数;δp为Kp(t)的随机样本向量,δp(t)~N(0,1)。在知识评估过程中,知识的匹配精度和多样性指标可分别表示为
Dp(t)=exp(-cos (Kp(t),KS(υ)))
(6)
(7)

ψp(t)=1-exp(-(Dp(t)+Mp(t))2)
(8)

(9)
式中:KR(t)为重构后的知识;ωp(t)为权重系数。重构后的知识能够与目标场景的任务相匹配。
3 DK-IT2FNN
3.1 网络结构设计
为了实现城市污水处理膜污染精准决策,本文设计了一种基于DK-IT2FNN的决策模型。
IT2FNN的结构如图1所示。IT2FNN共有5层,分别为输入层、隶属函数层、规则层、后件层、输出层,数学描述如下。

图1 IT2FNN的结构Fig.1 Structure of IT2FNN
输入层:输入层的输出可表示为
ru(t)=xu(t)
(10)
式中xu(t)表示IT2FNN的原始输入。
隶属函数层:隶属函数层的输出可表示为
(11)
(12)
(13)
(14)
规则层:规则层的输出可表示为
(15)

(16)
(17)
后件层:后件层的输出可表示为
(18)
(19)
(20)
输出层:输出层的输出可表示为
(21)
式中:γg(t)为第g个输出层神经元的后件层神经元输出下界的比例常数;(1-γg(t))为上界的比例常数。
根据Softmax回归模型,设概率p(y(t)=g)表示膜污染样本被判别为类别g的概率,选择输出最大的概率为最终类别,则对于G类分类器,输出为
(22)
(23)
式中:h(t)为IT2FNN模型的输出概率向量;y(t)为分类类别;κ为归一化函数,使得所有概率总和为1。
3.2 网络参数调整
为了提高IT2FNN模型的学习性能,提出一种迁徙梯度下降算法,在学习过程中将源模型的知识和目标模型的数据相结合。该方法的步骤为:在学习过程中,从源场景的膜污染决策历史数据中提取出一系列知识,将其转移到目标模型中。
将目标模型的目标函数定义为
(24)

wnew(t)=wold(t)+δwS(tϑ)
(25)
式中:wold(t)为目标模型中迁移前后件层输出权重;wS(tϑ)为源模型后件层输出权重,tϑ为迭代时间;δ为平衡参数,0<δ<1,代表目标模型和参考模型的关系。
DK-IT2FNN模型中,共有3个变量需要更新:源模型后件层输出权重、目标模型后件层输出权重、平衡参数。参数更新公式可分别表示为
(26)
式中η1、η2、η3分别为3个参数的学习率。
网络输出对参数求偏导,可分别表示为
(27)
4 仿真实验与结果分析
4.1 实验设计
为了验证上述提出的基于DK-IT2FNN的膜污染决策模型的有效性,实验选取某污水处理厂的真实运行数据,并分析相应识别结果。
在膜污染决策实验中共选取了1 000组数据作为参考场景的数据集,将500组数据作为当前场景的数据集,决策模型的输入变量为透水率、透水率衰减速度、产水流量、洗气量、污泥质量浓度、跨膜压差、产水浊度和透水率恢复率,输出变量为13种决策结果。同时,利用决策精度AD评价膜污染决策性能,可表示为
(28)
式中:EDT为决策结果正确的样本数目;EDF为决策结果错误的样本数目。
4.2 实验结果分析
本次实验采用实际城市污水处理厂数据,使用交叉验证的方法,以避免过拟合或样本容量不平衡导致的特征提取不完整而造成决策精度低的情况。将当前数据集的500组数据样本平均随机分为5个部分。然后,选取其中4个部分作为训练样本,另外的1个部分用于测试样本。重复10次后取结果的平均值作为最终结果。各类别决策的训练结果、测试结果分别如图2、3所示。膜污染决策训练结果和测试结果分别如图4、5所示。

图2 膜污染各类别决策训练结果Fig.2 Training results for each decision-making category for membrane fouling
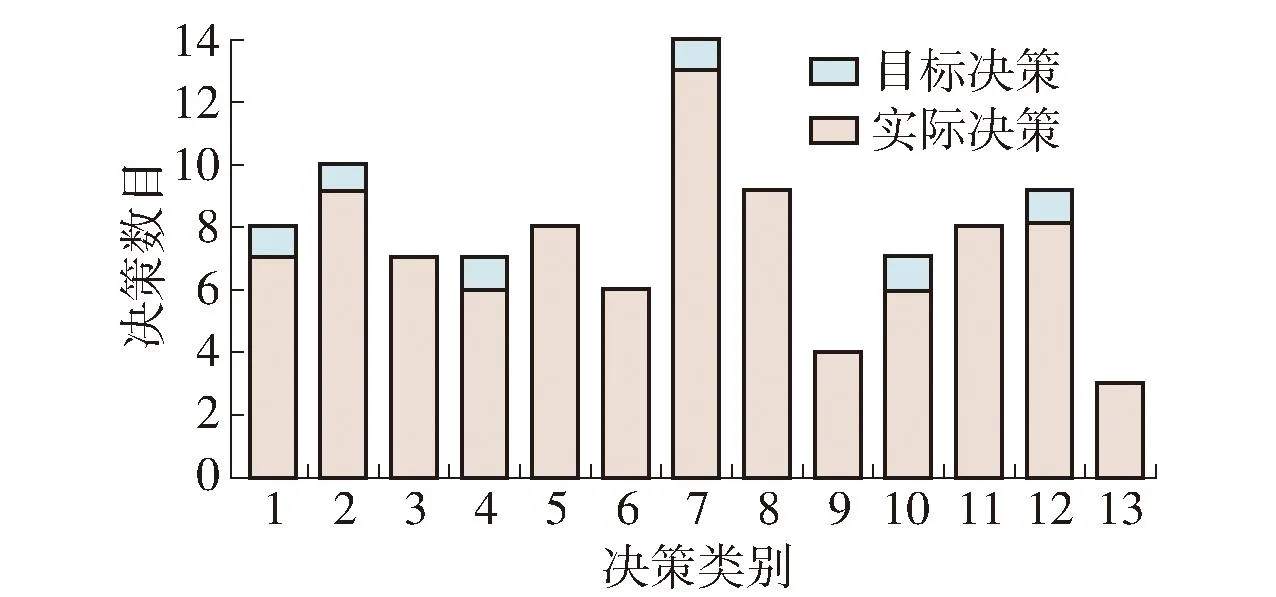
图3 膜污染各类别决策测试结果Fig.3 Testing results for each decision-making category for membrane fouling

图4 膜污染决策训练结果Fig.4 Training results of decision-making for membrane fouling
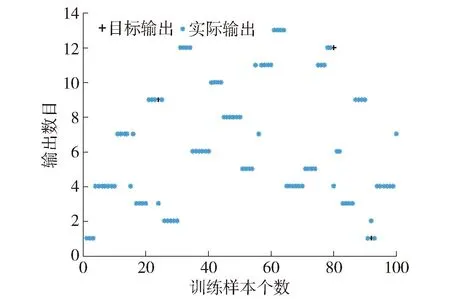
图5 膜污染决策测试结果Fig.5 Testing results of decision-making for membrane fouling
从图2、3中可以看出,在训练和测试过程中,基于DK-IT2FNN的膜污染决策模型具有较好的决策精度。同时,图4、5显示,该决策模型能够获得准确的决策效果,为膜污染抑制提供准确的抑制策略。
为了验证本文提出的基于KRM的DK-IT2FNN方法(KRM-DK-IT2FNN)的优越性,将实验结果与以下方法进行比较:1) IT2FNN方法,隶属函数层参数随机;2) KRM-IT2FNN方法,采用KRM对知识重构,隶属函数层参数随机;3) DK-IT2FNN方法,对知识不重构,隶属函数层参数由知识初始化。重复20次后取结果的平均值作为最终结果,结果对比如表3所示。
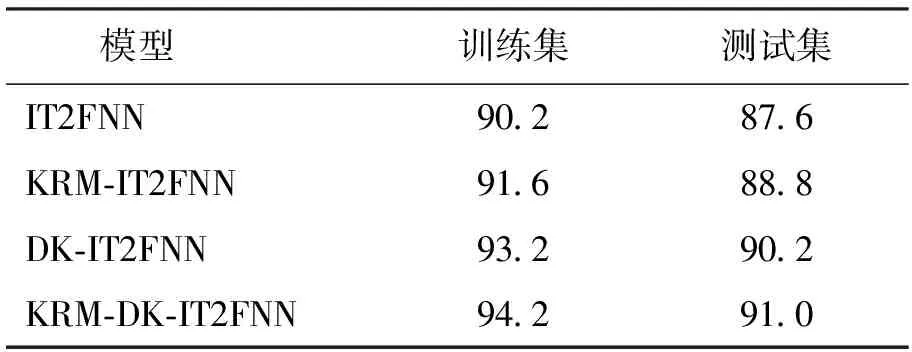
表3 不同决策模型决策精度的比较结果
从表3的结果可以看出,KRM-DK-IT2FNN方法和DK-IT2FNN方法的决策精度在训练集和测试集中均明显优于IT2FNN和KRM-IT2FNN,其中测试集中的决策精度大于90%,表明引入知识的方法能够提高决策模型精度,满足实际污水处理厂中决策精度高于90%的要求。同时,相较于IT2FNN和DK-IT2FNN,KRM-IT2FNN同样可以提高决策精度。因此,KRM-DK-IT2FNN方法的决策精度最高,在训练集和测试集中分别为94.2%和91.0%,能够为抑制膜污染提供更好的策略。
5 结论
1) 针对城市污水处理膜污染难以精准决策的问题,提出了一种基于DK-IT2FNN的决策模型。该模型利用决策知识的模糊规则设计隶属函数的中心和宽度,并利用迁徙梯度下降算法动态调整模型的参数,提高了模型的决策精度,实现了膜污染准确决策,可为膜污染抑制提供依据。
2) 将污水处理过程中关于决策方法的经验及运行数据进行总结,从操作知识中提取出TS形式的经验模糊规则,以13种模糊规则的形式表达,弥补了数据量不足的缺点。
3) 提出了一种KRM,通过平衡匹配精度和多样性,完成知识的重构,提高了已有知识的多样性。
