基于视觉机器人的球磨机自动加球系统
2024-03-08卢智峰张友旺
卢智峰,张友旺
1深圳市中金岭南有色金属股份有限公司凡口铅锌矿 广东韶关 512325
2中南大学机电工程学院 湖南长沙 410083
球 磨机筒体转动过程中,因受到离心力和摩擦力作用,磨球附在筒体衬板上,到达一定的高度后被抛落,利用磨球动能将物料击碎或磨削成粉末。磨球在使用过程中因磨削而逐步消耗,需要进行适量的补球。为保证球磨机内整体球荷的连续精确,必须进行连续精确化的装补球[1]。因此,球磨机自动加球技术得到了广泛研究,对该技术有了以下共识。
(1)可显著提高磨矿细度达标率[2]。
(2)可明显降低磨矿生产中与充填率关系密切的能量消耗。充填率过高,驱动功率增大,耗能升高;充填率过小,磨矿效率降低,相应的单位磨矿量电耗也升高[3]。对于人工加球方式,刚加完磨球的一段时间充填率过高,随后充填率逐渐变小,最后很难达到最佳的充填效果[4],无法保证球磨机钢球充填率的最佳状态[5]。
(3)对其他工艺指标的改善也较为明显,如某铁矿厂自动加球系统实现分时均量补加球方式后,其半自磨机的原矿处理量和磨矿量均得到了明显提高,球磨机衬板的延展变形问题得到改善,使用寿命延长约5.27%[6]。
从矿物的磨削效果、节能效果和工艺效果等方面分析,实现磨球的自动添加非常必要。自动加球系统主要包括储球仓、获取机构、导向机构、输送提升机构等结构,有滚筒式、转盘式、辊轮(辊筒)式、带式、球爪手式和磁吸式等多种工作方式[7-8]。其中,滚筒式、转盘式、辊轮(辊筒)式、带式、球爪手式加球系统,利用磨球的重力和分球机构(由滚筒、转盘、滚轮、输送带和球爪等构成)分取磨球,输送设备将被分取的磨球送入球磨机;但磨球表面较为粗糙,会使球仓内的磨球互相挤压而不能克服自身重力下落或被分球机构卡住,造成自动加球系统失效。磁吸式加球系统在磨球获取时克服了以上问题,但磁铁吸球个数不确定,且磨球运输中会因磨球间复杂的相对运动而产生被卡住的现象。
目前,矿山自动加球系统普遍采用滚筒和转盘结构的分球机构,堵球和卡球现象频繁出现,特别是球仓中磨球因互相挤压而堵在漏斗处,甚至形成悬空,即使采用振动器也难以处理,导致国内此类设备基本被搁置。
为解决上述问题,笔者提出视觉机器人自动加球系统,采用视觉匹配并识别磨球堆的表层磨球,获取匹配到的磨球坐标,再利用机械臂将其从球堆表层单个吸起并逐一连续输送,以消除现有自动加球系统堵球或卡球而导致系统失效的弊端。
1 视觉机器人自动加球系统介绍
视觉机器人自动加球系统由以相机为主体的磨球识别系统、以机械臂为主体的磨球抓取系统、以行车和电动葫芦为主体的磨球补球系统、以传送链条为主体的磨球输送系统等组成,如图1 所示。

图1 视觉机器人自动加球系统Fig.1 Automatic ball-adding system by visual robot
磨球抓取系统和磨球补球系统利用磁铁从磨球的上层吸取磨球,避免了利用磨球重力和分球机构的磨球分取技术所带来的磨球卡球或堵球问题。当机械臂抓球仓内磨球不多时,磨球补球系统为其补充磨球,以确保机械臂抓球系统的连续加球工作。视觉系统通过激光扫描获取机械臂抓球仓内的磨球图像信息,从中识别满足要求的磨球,给出其坐标。磨球抓取系统将视觉系统给出坐标的磨球抓取,送至磨球输送系统链条带上方的相应位置,由磨球输送系统输送到球磨机的入口,重力使磨球通过引导装置进入球磨机中。该加球系统是一个相互衔接、有机统一体,除将磨球由运输工具卸载到磨球储仓的工作由人工完成外,其他工作都由系统自动完成。
2 磨球识别系统
磨球识别系统是自动加球系统的关键技术之一,用于确定机械臂抓球仓内的某个磨球作为被抓取对象,并将其坐标通过以太网传送给机械臂抓球系统。本系统的视觉机器人位于工厂的储球区,距离球磨机较远;且矿料进入球磨机前均已湿透,粉尘稀少;同时相机镜头朝下,粉尘积聚程度甚微。在近一年的应用后,相机未做任何处理仍能正常进行图像识别,说明利用相机扫描进行磨球识别的方案是可行的。
考虑自动加球系统日夜加球的工作机制,以及磨球所处环境的光强度变化对图像灰度的影响,系统选用激光振镜 3D 相机,输出 tiff 格式的图像,以像素点的数值反映磨球的垂直高度。图像经过数据处理,得到抓球仓内磨球的几何形状,再利用给定球状模型进行匹配,计算出抓球仓内被匹配到的表层磨球的位置坐标,机器人将按此坐标进行定位并抓取磨球。磨球识别系统接收到控制系统发出的扫描命令后,触发相机扫描机械臂抓球仓,获取机械臂抓球仓内的图像信息,与预存的单个磨球图像匹配模型进行匹配,获取到机械臂抓球仓内所有与单个磨球图像匹配模型近似的各个磨球的位置,分析计算后得出其坐标值,再将坐标值发送给机械臂抓球系统。图像信息识别的程序采用 V C++编写,利用相机厂家提供的相机 S DK开发的接口函数和编制的图像处理算法,实现对相机的操控、磨球的识别和位置的确定。
3 磨球抓取系统
视觉系统精确提供磨球坐标,机械臂末端准确定位电永磁铁位置,电永磁铁可靠抓取磨球,都是自动加球系统的重要保障。磨球抓取系统(见图2)主要由4 自由度的机械臂、安装在机械臂末端的缓冲装置和电永磁铁等部件组成。
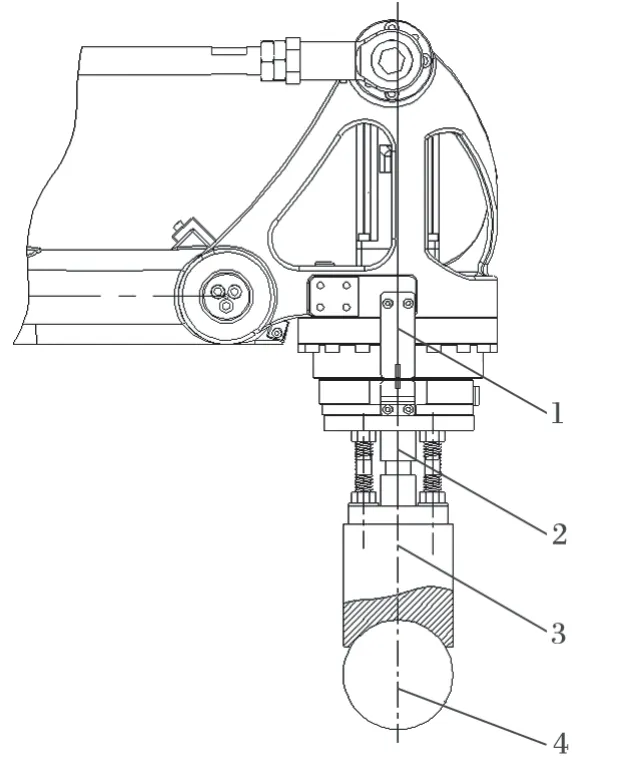
图2 磨球抓取系统Fig.2 Pick-up system of grinding ball
与传统的电磁技术相比,电永磁技术具有节能、性能稳定、可靠、安全、结构简单、吸力均匀、吸重比高等诸多优点[9]。为减轻机械臂的负载又保证足够的吸力,磨球抓取系统有必要采用电永磁铁。为保证电永磁铁具有足够的吸力,应尽可能增大电永磁铁与磨球之间的接触面积,因此将电永磁铁与磨球的接触面设计成球冠状。机械臂将电永磁铁驱动到视觉系统提供的坐标位置处时,电永磁铁得电激磁,将磨球吸取,将电永磁铁连同被吸取的磨球驱动到链条输送系统链条上方的指定位置处,电永磁铁失电退磁,将磨球释放到链条输送机上。
3.1 缓冲装置
机械臂高速运动,会产生很大的振动冲击和抖动,如果没有很好的缓冲措施,将影响抓取动作的准确性和速度[10]。在机器人抓取磨球时,电永磁铁在机械臂的驱动下靠近磨球,磨球铸造时保留的浇口突出或z坐标定位误差等原因,可能导致磨球与电永磁铁发生撞击,引起磨球的振动移位,使电永磁铁吸取磨球失败。因此,在电永磁铁与机械臂末端之间设计缓冲装置,如图3 所示。
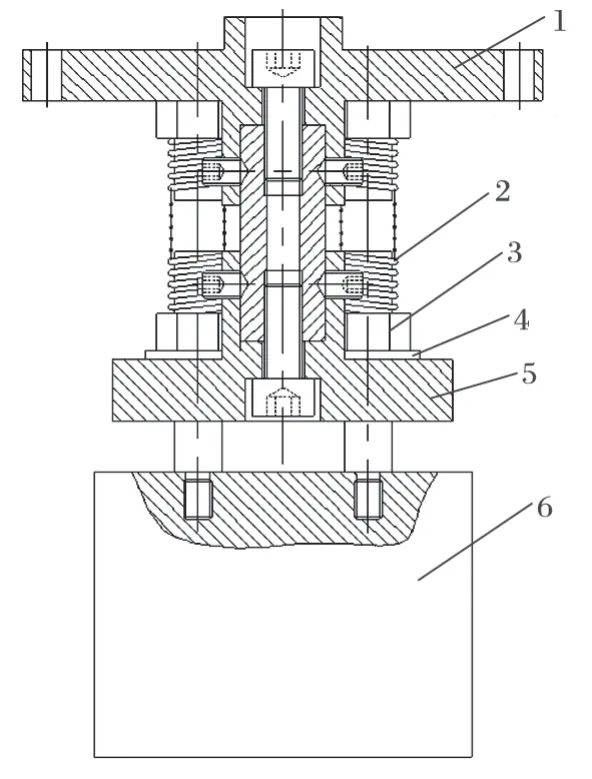
图3 缓冲装置Fig.3 Buffering device
缓冲装置允许电永磁铁到达磨球位置后继续运行一段位移,对磨球形成一定压力,提高电永磁铁对磨球的吸力,从而可靠地抓取磨球。法兰盘 1 与机械臂末端用螺钉连接固定;与法兰盘 2 通过 1 根连接轴、紧定螺钉和 4 个内六角螺钉连接固定为一体;活动销通过螺纹与电永磁铁固定为一体,且可在滑动轴承内上下移动。活动销通过弹簧与法兰盘 1 连接,可以使电永磁铁与法兰盘 1 之间实现弹性运动。
3.2 磨球的计量
磨球的添加速度和数量必须满足矿浆粒度的控制要求,系统采用磨球计量装置(见图4),结合PLC系统实现磨球的计量。该装置的关键部件为安装在链条输送机侧板上的光发射器和光接收器组成的光电开关。磨球从机械臂末端被电永磁铁释放后,在重力作用下自由下落,经过光发射器和接收器之间时,光发射器的光线被挡住,使接收器集成的光敏开关在磨球落下的过程中发出一个脉冲,利用 PLC的计数器对该脉冲进行计数,获得磨球的实际加球数量。
4 磨球补球系统
相机的扫描范围和机械臂的工作范围均有限,不能识别和抓取稍远的磨球,限制了机械臂抓球仓的容积,而球磨机每天需添加的磨球数量较大,约为3 000~5 000 kg。为实现机械臂抓球系统不间断地工作,保证球磨机内填充率的稳定,在机械臂抓球仓内的磨球较少或没有磨球时,补球系统能自动将一定数量的磨球从磨球储仓内吸取并转移到机械臂抓球仓内,供机械臂抓取。
补球系统的工作原理:视觉系统在识别到机械臂抓球仓内磨球的数量小于一定量时,发出指令给补球系统,控制行车运行到指定位置;电动葫芦释放电永磁铁,使电永磁铁下落到磨球储仓内的磨球上;给电永磁铁通电激磁,吸取一定数量的磨球;电动葫芦提升到指定高度,控制行车携带电永磁铁和被吸取的磨球运行到补球漏斗上方;将电永磁铁释放到补球漏斗上,电永磁铁失电退磁,被吸取的磨球在重力作用下通过补球漏斗沿溜槽进入机械臂抓球仓内。溜槽截面在磨球运动方向上没有收缩,所以不会发生被磨球堵住的情况。
根据测得的电动葫芦吊绳张力,判断电永磁铁是否落在磨球上,并综合电动葫芦上升和释放电永磁铁的时间,分析计算出储球仓内磨球堆放的高度。在每次收到补球指令时,根据以往补球时磨球堆放的高度情况,控制电动葫芦携带电永磁铁随行车运动到磨球堆放的最高位置,确保磨球储仓内不同位置的磨球比较均衡地被吸取和转移。磨球储仓的容积根据需要进行设计,可以满足一定时间的加球需求。
5 磨球输送系统
磨球输送系统(链条输送机)中,机械臂将磨球释放后,磨球在重力作用下落在链条的连接板上,随电动机驱动的链条运动,最终被送至球磨机的入口,再由磨球引导装置引入球磨机。在链条上设计磨球挡板,一方面可防止磨球在输送过程中大幅度窜动,另一方面可在提升段托举磨球完成提升动作。
6 系统工作流程
6.1 预备工作
系统工作之前,还需做好如下两项预备工作。
(1)根据日加球量、磨球尺寸和磨球密度,计算相邻 2 个磨球添加的时间间隔,作为工作循环的定时时间。
式中:t为相邻 2 个磨球添加的时间间隔,s;R为磨球直径,m;ρ为磨球密度,kg/m3;m为日加球质量,kg。
(2)用相机扫描机械臂球仓内的磨球,获取其图像。在该图像中截取某单个磨球的模型,作为匹配模型,用于磨球的匹配与识别。
6.2 工作循环
定时设置,到时间后会触发相机对机械臂球仓内的磨球进行扫描,获取图像信息;与匹配模型进行运算,匹配到几何特征相近的磨球;计算成功匹配的磨球中心的像素坐标(u,v,z);通过相机内部标定,获取该像素坐标点在相机坐标系中的坐标(Cx,Cy,Cz);通过手眼标定,获取该坐标点在机械臂坐标系的坐标(Rx,Ry,Rz);将坐标发送给机械臂控制系统,由机械臂控制系统驱动机械臂携带电永磁铁,使其球冠中心运动到该坐标点;发激磁指令给电永磁铁以吸取被匹配到的磨球,再由机械臂携带磨球到磨球输送机上的确定位置;发退磁指令给电永磁铁以释放磨球到输送机上,由磨球输送机和相应的引导装置将磨球送入球磨机,一个磨球添加完成。等待下一个定时,进行下一个磨球的添加,如此循环工作。
当视觉系统识别到机械臂球仓的磨球数量少于一定值或将被添加完时,发出指令给补球系统,从磨球储存仓内吸取一定数量的磨球对机械臂球仓进行补球,避免影响后续的抓取、输送工作。
7 结论
(1)针对现有自动加球机堵球或卡球现象,设计了基于视觉机器人的球磨机自动加球系统。该系统将给定的球状模型与 3D 相机扫描图像信息进行匹配,获取磨球堆表层的磨球坐标,携带电永磁铁的机械臂准确抓取或释放磨球,与PLC 相结合的磨球计量装置可准确获得实际加球数量,补球系统能够确保连续加球。
(2)该系统经过一定时间的现场运行,单次成功添加的概率大于 98%;单次没有成功添加的磨球,第2 次均能成功添加。
(3)系统完成单次添加的时间约为 12 s ;按 95%磨球单次添加成功,2% 需二次添加成功计算,对于直径为 80 mm 的磨球,日加球量可达 14.5 t 左右。
