脱模机转动系统极点配置控制器设计
2024-03-06许继洋任岩丛
许继洋,王 琦,任岩丛
(1.武汉工程大学 机电工程学院,武汉 430000;2.宁波方太厨具有限公司,宁波 315000)
在建筑工程施工过程中,施工方通过试块检测混凝土的强度,以确保混凝土配比是否合理并达到设计标准[1]。混凝土试块脱模是混凝土试块制作及养护过程中的一大重要步骤,混凝土试块脱模过程的好坏直接影响到混凝土试块的合格标准,人在脱模的过程中会出现不同的失误,主要依赖工人的经验和技术,基于这种情况,中建商砼公司决定减少人力干预,采用脱模工艺,研发出一种全自动的混凝土试块脱模设备,以提高整体的混凝土试块制作到检测的过程。
本文是以混凝土试块脱模机研发项目为背景,以脱模机中的转动过程为例,对其运动控制系统进行研究。采用了极点配置控制混凝土试块脱模机的转动系统,通过对上述控制结果为基础,使用遗传算法优化控制参数,以提高脱模机转动过程的优化控制。研究的目标是提高脱模机运动控制过程的工作效率和性能。
1 脱模机结构
1.1 脱模机结构建立
从各种调研结果得知,目前只有文献[2-3]研发了一种快速制作混凝土试块的新型设备,能够同步快速制作和脱模多组试块,并无其他类似的试块脱模机构使用,绝大多数的水泥制造工厂均采用人工手持气枪的方式对混凝土试块进行脱模工作。针对上述存在的问题,研发了一种混凝土试块脱模机,目的在于提供一种能够自动实施水泥试块脱模并保证试块模具整齐的水泥试块脱模机构。本次自动脱模机能够同时进行多个试块的脱模工作,通过调整水泥试块模具托盘的数量来达到控制试块数量的效果,解决了传统手工脱模过程中高频率操作的问题。而且在脱模过程中无需人工进行辅助操作,通过多次反转的方式,达到脱模和整理模具的效果,解决了手工脱模结束后模具摆放散乱的问题。脱模机总体结构如图1 所示。

图1 脱模机总体结构图Fig.1 Overall structure of stripping machine
全自动混凝土试块脱模机包括电机、直行导轨、气枪板电推杆、齿轮齿条电推杆、气嘴板、定位板、外框架、内框架、横向推杆装置、强力角件、弯曲连接件、轴承座、气嘴保护板组成。
1.2 脱模机转动模型建立
脱模机的转动主要借助直流伺服电机作为驱动,电机的定子由磁体提供稳定的磁场,直流电源为转子提供电流。其原理如图2 所示。
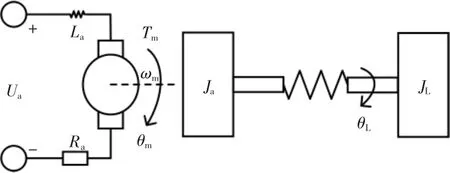
图2 传动系统角度控制模型图Fig.2 Diagram of transmission angle control model
基尔霍夫电压定律和牛顿第二定律[4-7],得到满足的动力学方程和电学方程有:
电枢回路电压平衡方程:
在电动机转动时,电枢中会产生反电动势,反电动势的大小与电机转轴角速度成正比,即:
式中:Ke为反电动势常数。
当电机处于分外励磁电流和转速状态时,根据电磁转矩方程可知,输出的力矩与电枢电流成正比,即电磁转矩方程为
当电枢通过电流时,产生一个力矩,该力矩可用于维持负载和克服摩擦力等。根据牛顿第二定律,得到负载平衡方程为
式中:TL为负载转矩;Jm为发动机发射到电动机轴上的负载的等效转动惯量;Bm为电动机和发射到电动机轴上的负载的等效黏滞摩擦系数[8-9]。
由式(3)和式(4)可得:
当假设负载为0 时,即TL=0,则由式(5)化简可得:
由式(1)和式(2)可得:
将式(7)化简为
本节以脱模机内框架转动系统为研究对象,依靠电机进行负载,将电机旋转角度作为输出,其力学模型如图2 所示,又因为根据上述电压平衡方程,可得其力学微分方程:
所以针对脱模机转动过程运动模型,建立状态空间模型如下:
公式中出现的变量及定义如表1 所示。
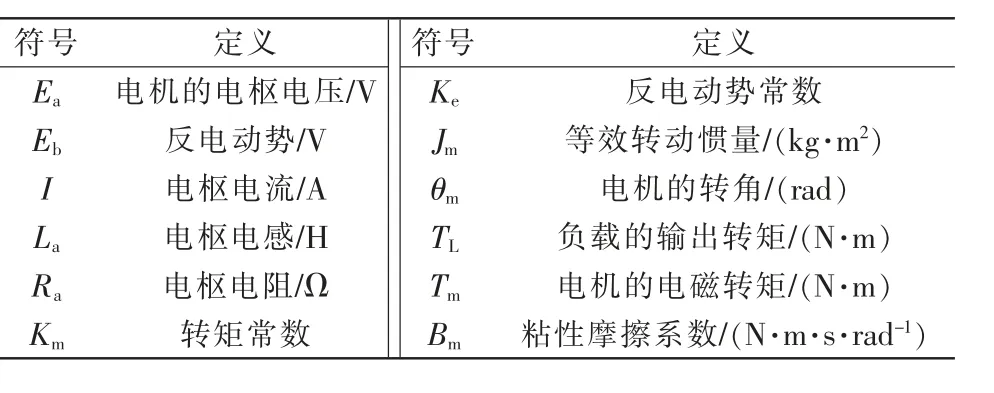
表1 公式中出现的变量及定义对照Tab.1 Comparison of variables and definitions appearing in equations
本设计选择的直流电机型号为SVGA-25H11BD,其相关参数如表2 所示。

表2 直流电机参数Tab.2 DC motor parameters
根据表2 的参数选择,将数据输入到上述状态空间方程(11)中,得到脱模机转动系统的状态空间方程为
2 控制系统的稳定性分析
如果一个定常系统的特征多项式的所有特征根都是实数且小于0,根据劳斯稳定性准则,该系统是稳定的。相反,如果特征多项式的一个或多个特征根具有正实部,则系统是不稳定的。对脱模机的转动系统做稳定性分析,求转动系统的矩阵A 的特征根,当时,在Matlab 中输入eig(A),求出矩阵的特征根分别为0,-85.1769,-172.6706,该系统特征多项式的特征根有一个为0,说明该系统处于临界稳定状态,也就是处于不稳定状态,所以脱模机转动系统处于不稳定状态。
3 极点配置控制器的设计与仿真
3.1 极点配置控制算法
极点配置法是通过选择一个合适的状态反馈矩阵,将闭环系统的极点配置在指定的位置,以期望达到一定的控制目标,根据上述公式可以得到脱模机转动系统的传递函数和状态空间模型,该状态空间方程以电压作为输入,以转动装置的旋转角度作为输出,得到状态空间方程的A、B、C、D 的值[10-11]。
控制对象的状态方程为
式中:x(t)为n 维状态向量;u(t)为控制向量,A、B分别为n×n 和n×1 的常数矩阵,在该系统的状态方程里,控制输入信号为
式(13)带入式(14)可以得出:
方程的解为
从式中可以看出,如果系统完全可控,状态反馈矩阵K的选取适当,对于任意初始状态,当t 趋于无穷大时,x(t)都趋于0。
3.1.1 配置极点的基本步骤
(1)检验系统的可控性条件。只有系统的状态完全可控的,才能进行任意极点配置,该判断已由第2 章可知。
(2)由系统矩阵A的特征多项α2sn-2+…+αn-1s+αn确定a1,a2,…,an的值。
(3)确定能够使系统状态空间方程变换为能控标准型的变换矩阵T,其中T=MW
由于
所以
(4)利用期望的特征值u1,u2,…,un,写出特征多项式αn-1s+αn并确定a1,a2,…,an的值。
(5)需要的状态反馈增益矩阵K为
3.1.2 I 型伺服器
在控制对象中不含有积分器的情况下,在控制对象与误差比较器之间的前馈通路中添加一个积分器,该系统的状态空间方程为[12]
针对I 型伺服系统,可以给出的状态误差方程为
通过极点配置法确定控制系统所需要的状态反馈增益矩阵K,首先必须验证检验矩阵P的秩,若P为满秩,则由式(3)~式(18)所定义的系统是可控的,并可以任意配置极点;反之,若P的不为满秩,系统是不可控的,则该系统不能使用极点配置法。
当确定了系统的状态反馈增益矩阵K和积分增益常数kI,系统的阶跃响应可通过下列方程求得:
由于u=-KX+kIξ,所以公式(20)可写为
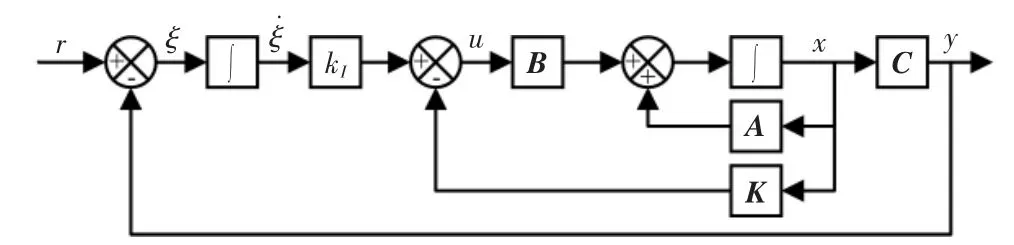
图3 极点配置控制系统Fig.3 Polar configuration control system
3.2 极点配置控制仿真
本文中极点配置的极点J 主要来源于试凑法,通过不断改变极点位置来分析最合适的极点,通过不断的尝试,设极点位置为J=[-1+j·sqrt(3)-1-j·sqrt(3)-5 -5];在Matlab 中使用Khat=acker(Ahat,Bhat,J);得出状态反馈增益矩阵、积分增益常数。在Matlab中给出一个阶跃输入信号,得到系统的控制仿真曲线,如图4 所示。
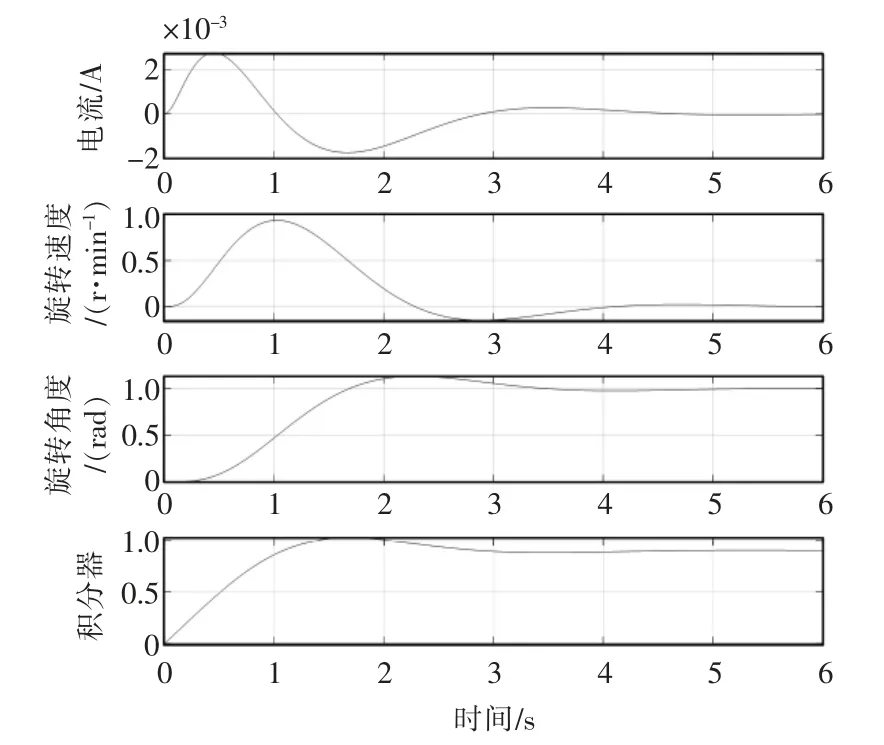
图4 脱模机转动系统极点配置阶跃响应图Fig.4 S trip p er rotation system p ole configuration step resp onse p lot
通过图4 可以看出,当直流伺服电机作为驱动时,初时电机输入电流较大,脱模机的转动装置旋转速度较快,当到达1.2 s 后,电机输入电压放缓,脱模机转动装置的旋转速度开始逐渐减慢,当抵达6 s后,电机转动停止,脱模机转动系统达到平衡,速度为0,此时脱模机转动的角度达到了理想的位置并稳定。
4 基于遗传算法的极点配置控制器设计与仿真
4.1 基于遗传算法的脱模机转动系统极点配置控制
极点配置控制的效果与极点的选择密切相关,不同的极点配置会导致不同的控制结果。针对该问题,目前存在许多优化极点配置控制参数的方法,例如间接寻优法、梯度法、退火法等。虽然这些方法具有较好的寻优特性,但也存在一些缺陷。为了寻求参数的最优解,采用遗传算法进行优化。相比于其他优化方法,遗传算法还可以处理非线性约束和多目标问题。
4.2 遗传算法确定参数的过程。
通过遗传算法确定极点配置参数的过程如下:
(1)确定参数变量。通过第3 章的状态空间方程可知,本次极点配置控制极点的数量有4 个,将这4 个参数的变量分别由x(1),x(2),x(3),x(4)表示,将这4 个变量的范围设置为[-1000]。
(2)编码和解码。将上述的4 个变量用长度为10 的二进制字符串表示,再把这4 个字符串串联起来连成一个长的二进制字符串,该字符串为遗传算法的编码和解码。
(3)确定目标函数。为了使系统具有满意的动态响应特性,并避免过度消耗控制能量,可以采用误差绝对值时间积分指标来作为选择控制参数的最小目标函数。同时,可在目标函数中加入控制输入的平方项,以有效地减少控制能量浪费的问题。综上所述,这种控制系统可描述为
式中:e(t)为系统误差;u(t)为控制器输出;tu为上升时间;w1,w2,w3,w4为权值,且w4≫w1;ey(t)=y(t)-y(t-1);y(t)为被控对象的输出。
(4)确定适应度函数。为了使控制效果更好,将控制量、误差和上升时间作为约束条件,控制系统的性能直接取决于由这3 个条件构成的目标函数J值,目标函数越小,说明系统输出的控制效果越好。为了使目标函数J 值最小,需要一个合适的控制量,误差和上升时间,而这3 个条件的满足是通过系统的控制参数来决定的,算法的任务就是搜索到相应的值。因为适应度函数与目标函数相关,在遗传算法中将目标函数J 的倒数作为适应度函数。
(5)确定遗传算法的运行参数。在根据实际情况确定种群的大小、遗传代数、交叉概率、精英成员,本文中通过目标函数确定迭代到20 代就不再有变化,经过研究,发现种群越大,寻优的可能性就越大。
4.3 基于遗传算法极点配置控制
设置遗传算法,在Matlab 程序中设置遗传算法的种群大小为100,交叉概率为0.4,精英成员为10。变量的区间为[-1000],其中设置遗传代数为20 代。经过遗传算法寻优后得到的参数分别为J=[-21.6-98.55 -37.65 -71.06],得到目标函数曲线如图5 所示。然后将试凑法得到的极点参数和经过遗传算法寻优得到的参数在相同的阶跃响应下,针对脱模机转动系统进行仿真,得到的仿真曲线如图6 所示。

图5 目标函数优化过程及最优个体图Fig.5 Optimization process of objective function and optimal individual map

图6 两种优化方法的角速度仿真图Fig.6 Simulation of angular velocity for two optimization methods
从图5 可以看出,当程序运行到第4 代时,程序已经找到了最优目标函数,当程序运行到20 代结束后,此时得到的极点位置是J=[-21.6 -98.55-37.65 -71.06],经过Matlab 计算得到状态反馈增益矩阵K=[-0.130.024.32 -44.53]。
通过图6 可以看出,试凑法得到的仿真曲线在6 s 后才会趋于稳定,且具有一定的超调量。而通过遗传算法优化后的仿真曲线在0.5 s 后就达到了理想的控制效果。相比试凑法,脱模机转动系统的控制中使用遗传算法可以显著缩短达到稳定的时间。
通过试凑法搜寻极点配置的极点需要不断的调试,很难找到更优的数值。这需要进行大量的试错,耗费大量的时间。相比之下,通过遗传算法寻找参数可以更加方便地完成给定目标函数。遗传算法不仅可以节省大量的时间,还可以在短时间内找到比较优的参数值。
5 结语
本文以最新研发的混凝土试块脱模机为研究对象,主要研究了该脱模机的转动系统,提高其角度控制,通过动力学原理建立了转动系统的数学模型,并进行了可控性和可观性分析。针对脱模机转动系统提出了极点配置控制,并通过Matlab 仿真结果展示了极点配置法对脱模机转动系统的控制效果,其结果表明该控制方法取得了理想的控制效果。在该控制算法的基础上,使用遗传算法对其进行优化,仿真结果表明,使用遗传算法优化极点配置后的控制系统的稳定时间从6 s 缩短到了0.5 s 且减少了超调量,极大地提高了控制系统的性能,减少了系统稳定的时间。
