基于5G+UWB 和惯导技术的井下人员定位系统
2024-03-01李明锋刘用吴学松徐继盛常建明王涛潘红光
李明锋, 李䶮, 刘用, 吴学松, 徐继盛, 常建明, 王涛, 潘红光
(1. 甘肃华亭煤电股份有限公司 砚北煤矿,甘肃 华亭 744100;2. 西安科技大学 电气与控制工程学院,陕西 西安 710054)
0 引言
随着现代化采矿技术的不断发展,对于井下人员定位的需求越来越迫切。由于井下环境的特殊性和复杂性,传统井下人员定位技术面临着许多挑战,如信号衰减、多径效应和信号干扰等问题。因此,研究人员开始探索基于新型技术的井下人员定位系统,以提高定位的精度和可靠性。
基于无线通信技术的方法被广泛应用,如WiFi定位、超声波定位、蓝牙定位、红外线定位和无线射频识别定位等[1-2]。其中,WiFi、蓝牙等定位技术是通过接收信号强度实现定位[3-4],在信号传播过程中易受环境条件限制与影响,稳定性差、定位精度不高。超声波和红外线等定位技术只适用于小范围定位[5]。无线射频识别定位技术作用范围有限,只适用于近距离定位。
超宽带(Ultra Wideband,UWB)通过纳秒及纳秒级以下的窄脉冲来获得测距信息,具有多径分辨能力强、定位精度高、功率消耗小、适用范围广等优势。惯性导航系统也被用于井下定位,通过测量加速度和角速度等信息来估计位置。文献[6]考虑煤矿井下设备部署情况,综合分析UWB 芯片中心频率干扰与衰减情况,解决了UWB 与5G 相互干扰问题。文献[7]通过遗传算法从信道脉冲响应提取的特征中选择最佳的特征组合,并利用支持向量机(Support Vector Machine,SVM)识别与抑制非视距(Non-Line of Sight,NLOS)误差。文献[8]将模糊推理与K 最近邻(K-Nearest Neighbors,KNN)算法相结合,并通过改进的位置指纹法减小NLOS 误差影响,提高UWB 定位精度。文献[9]通过BP 神经网络对大量数据进行训练后完成基于到达时间差的定位解算。文献[10]将超声波传感器与安装在鞋上的惯导系统相结合,收集墙壁相对于行走路径的位置信息,以提高惯导系统的长期稳定性,降低累计误差。文献[11]利用互补卡尔曼滤波器(Comlimentary Kalman Filter, CKF)融合UWB 和惯性测量单元数据,并跟踪位置、速度和方向等变量误差,自适应设置磁力计与UWB 数据的权重,以校正方向与位置误差,提高定位精度。文献[12]基于扩展卡尔曼滤波器(Extended Kalman Filter, EKF)和无损卡尔曼滤波器(Unscented Kalman Filter, UKF)提出了一种惯性测量单元和UWB 组合的室内综合定位系统,以提高系统的鲁棒性和准确性。为了减轻NLOS 带来的测距误差,文献[13]提出了一种基于SVM 的半监督学习方法,通过针对未标记数据集进行自训练,实现NLOS 识别,并降低测距误差。文献[14]在传统的视距(Line of Sight,LOS)与NLOS 二分类机器学习的基础上,将多径(Multi-Path, MP)作为第三类融入机器学习分类中,并横向对比了SVM、随机森林(Random Forests,RF)及多层感知机(Multilayer Perceptron,MLP)在三分类中的效果。实验结果表明,相比于二分类,三分类具有更高的测距精度及NLOS 识别率。文献[15]将NLOS 场景细化至人体阴影遮挡领域,提出了一组用于实时NLOS 识别与误差消除机器学习方法的新型UWB 数据特征。文献[16]考虑到机器学习所需数据集采集难度大的问题,使用对抗生成网络实现NLOS 数据增强,并使用自动编码器增强训练模型,通过实验验证其生成的信道脉冲响应(Channel Impulse Response,CIR)数据有效性。文献[17-18]考虑到UWB 测距领域连续帧之间存在相关性,采用长短期记忆(Long Short Term Memory,LSTM)深度学习方法来提取时间特征,并为一系列输入数据提供高级表示,最终实现20 cm 的均方根误差。
尽管上述文献针对UWB 测距能力进行了研究与分析,并通过各种手段提升了UWB 测距精度,但对设备算力与存储资源有较高要求。在实际应用中,现场设备的算力与存储资源无法支撑上述研究提出的算法。在工业应用中,数据即时传输与响应能力、数据传输延迟、人力物力损耗都需要着重考虑。目前的煤矿井下人员定位系统中,通常采用有线数据传输的方式,在系统安装与维护中,对于人力物力要求较大。
针对上述问题,本文提出了一种基于5G+UWB和惯导技术的井下人员定位系统。利用UWB 测距与定位技术修正惯导技术随时间误差累计的问题,利用惯导技术降低UWB 测距与定位技术中NLOS带来的精度下降问题。利用无线通信技术实现高效数据即时传输与响应,降低数据传输延迟,并减少基站所需线缆,从而在系统部署与维护阶段降低基站部署难度,减少人力物力成本。
1 5G 通信、UWB 定位与惯导技术
1.1 无线通信技术
1.1.1 5G 技术
与4G 相比,5G 具有更高的速度、更低的时延和更大的连接密度,这为人员定位提供了全新的应用可能性[19]。首先,5G 技术的高带宽和低时延特性使得实时数据传输成为可能。在人员定位中,传感器通过采集人员的位置和运动信息,将这些数据传输到5G 网络中,实时发送给后台处理系统,实现对人员位置的及时监测和定位。其次,5G 技术的大连接密度能够支持同时连接大量设备[20]。文献[21]结合煤矿智能化建设需求,分析了5G 专网特性,提出多种混合专网方案。在人员定位中,通过将定位设备和传感器与5G 网络连接,可同时监测和定位多个人员,提高定位系统的扩展性和适用性。此外,5G 技术还具有更好的信号覆盖和穿透能力。在复杂的井下环境中,传统的通信技术受到信号衰减、多径效应和信号干扰的影响,导致定位精度下降。而5G 技术通过使用更高的频段和更先进的天线技术,提供更强的信号覆盖和穿透能力,增强了在复杂环境下的定位精度和可靠性。
1.1.2 UWB 技术
UWB 技术是一种基于宽带信号的通信技术,具有高宽带、短脉冲持续时间、低功率密度、抗多径效应、高抗干扰性等特点[22],在无线通信、定位和雷达等领域具有广泛的应用前景,尤其在井下人员定位系统中,UWB 技术能够实现高精度的距离测量和定位,为井下工作的安全性和生产效率提供重要的支持。
UWB 信号是瞬时带宽B大于500 MHz 或部分占用带宽B′大于0.2 的无线电信号。UWB 功率谱密度如图1 所示,其中fL,fH分别为功率谱密度比信号峰值低10 dB 的低频数值与高频数值。
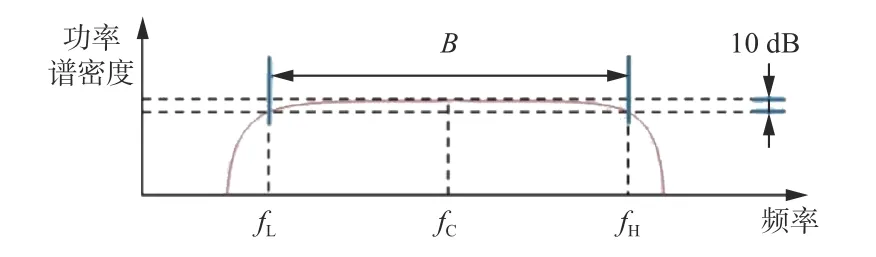
图1 UWB 功率谱密度Fig. 1 UWB power spectral density
式中fC为信号的中心频率,fC=(fH+fL)/2。
1.1.3 5G+UWB 融合技术
目前在煤矿井下环境中,UWB 定位基站通过有线以太网组成环网,在接收到身份标志卡测距数据后,UWB 定位基站各自独立向地面计算平台上传数据。受限于UWB 定位基站无线通信技术的缺失,在系统安装部署阶段,为了实现上百台人员定位基站通过有线连接组成环网,所耗费的以太网网线总长度可达几千米,且需将网线固定在巷道壁上,需耗费较大人力物力及较长的时间来完成。因此,本文提出一种基于5G+UWB 融合技术的无线通信基站方案。通过将数据传输方式升级为5G 无线传输,解决现有煤矿井下人员精确定位系统中UWB 定位基站部署难度大的问题。在末端采集定位信息时,部署能耗低、抗干扰性强的UWB 定位基站,定位基站与5G 基站以级联的方式连接,定位基站采集UWB 与惯导数据,利用5G 网络回传至计算平台,在计算平台上完成定位信息的解算和存储。在已部署UWB系统的井下,该方案既能利用 UWB 技术的低功耗和抗干扰特性,又能利用 5G 技术的低时延和多连接功能,满足井下人员定位的实时性和唯一性识别的要求。
煤矿井下人员定位系统架构见表1。其中硬件层由人员标志卡与UWB 定位基站组成,其功能为采集定位信息。网络层由光纤、交换机等设备组成,其功能为与硬件层的UWB 定位基站中5G 单元连接通信,进行数据传输。应用层包括地面计算平台和车载智能计算与控制平台,通过获取人员和车辆定位数据,以实现人员定位、车辆定位等功能。
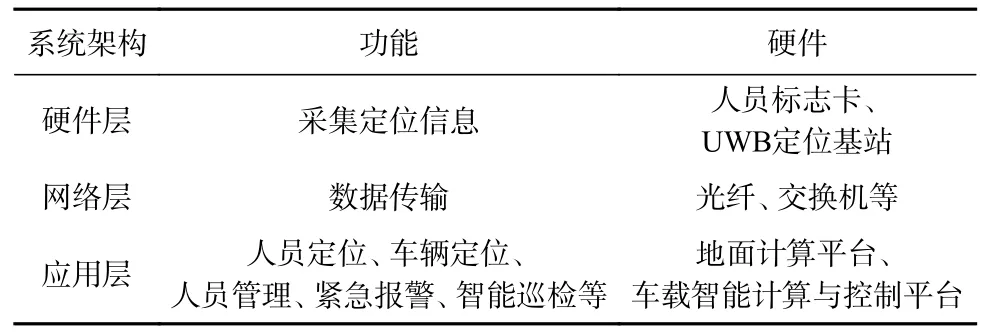
表1 煤矿井下人员定位系统架构Table 1 Positioning system structure of underground coal mine personnel
1.2 定位技术
1.2.1 基于UWB 的双向测距技术
煤矿井下基于UWB 的双向测距(Two-way Ranging,TWR)模型如图2 所示,其中,Tprop为UWB脉冲信号在基站与标签之间的真实传播时长,Troud为定位标签从发送到接收(TX-to-RX)所耗时长,Treply为定位基站从接收到发送(RX-to-TX)所耗时长,t1为设备A 作为信号发送方发送信号的时刻,t3为设备A 作为信号接收方接收信号的时刻,t2为设备B 作为信号接收方接收信号的时刻,t4为设备B 作为信号发送方发送信号的时刻。设备A 按照预先设置好的固定周期,定时结束休眠,在数据包发送前打包(Pack-Pre)阶段完成对脉冲数据包的构建、加密、压缩过程,广播发送UWB 脉冲信号,并记录脉冲时刻。设备B 接收到脉冲数据后,在数据包接收后解析(Pack-Parse)阶段对UWB 脉冲数据包进行解压、解密与解析,进行UWB 脉冲信号第一径(First Path,FP)判断与到达时刻计算,并记录Pack-Parse 阶段的结束时刻。由设备B 发送数据,设备A 解析数据,从而完成1 次测距。
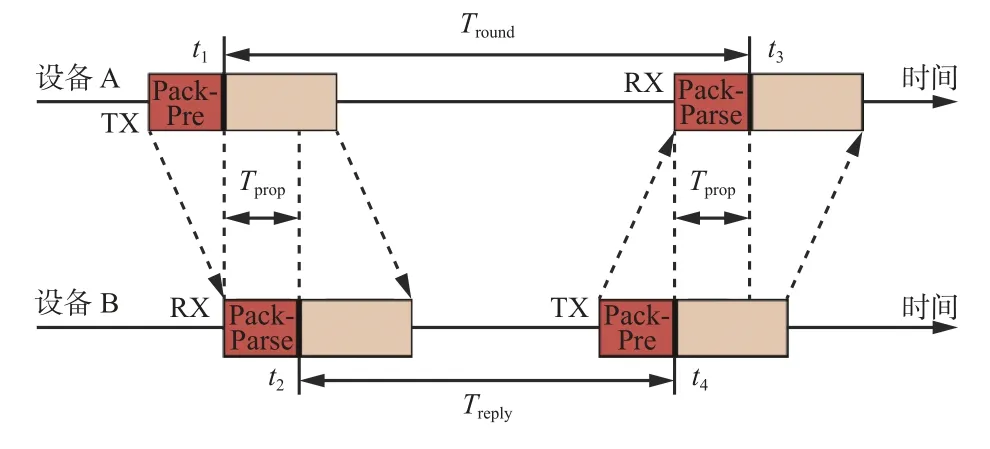
图2 煤矿井下基于UWB 的TWR 模型Fig. 2 UWB-based two-way ranging model in coal mine
UWB 脉冲信号以电磁波形式传播,其传播速度为光速,结合可计算出传播距离,即
1.2.2 基于到达时间的三边定位算法
到达时间(Time of Arrival,TOA)测距技术是一种基于时间的距离测量方法,用于确定信号从发送器到接收器之间的传播时间,并通过传播时间计算出信号的距离[23]。
三边定位算法根据测量的距离为半径画圆,通过圆的交点确定标签的位置,因此至少需要3 个基站。以测得的3 个基站的距离为半径画圆,绘出的3 个圆将会有1 个共同的交点,即标签所在位置,从而实现定位[24],如图3 所示。其中,MS(Mobile Station)表示待定位的移动设备,BS(Base Station)表示无线通信网络中的固定基站,负责与移动设备进行通信并提供覆盖区域的服务。
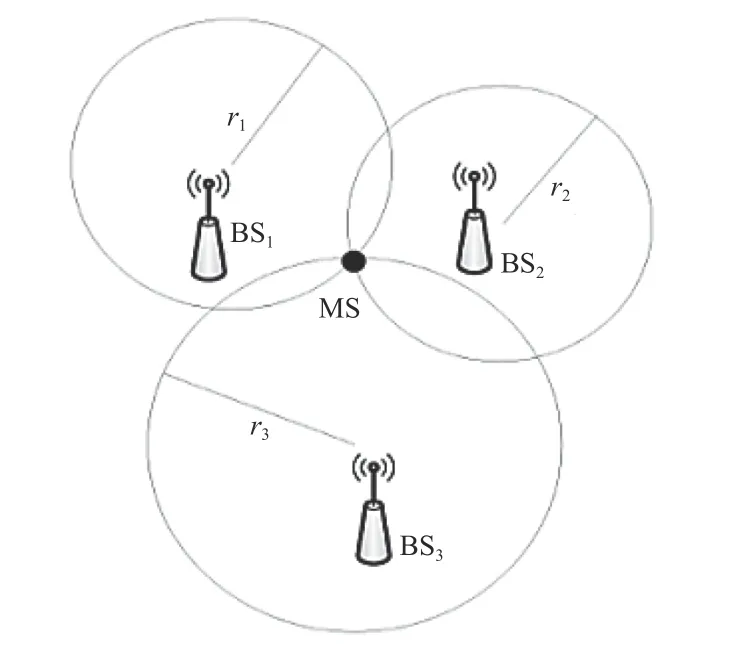
图3 基于TOA 的三边定位原理Fig. 3 Principle of trilateral positioning based on the TOA
3 个基站BS1-BS3与MS 的距离分别为r1,r2,r3,以各基站为圆心,测量距离为半径,绘制3 个圆,其交点即MS 的位置。在实际情况中,一般基站数量N≥3,根据最小二乘法(Least Square Method, LS)计算MS 的估计位置。假设MS 的位置坐标为(x,y),第i个基站的位置坐标为(xi,yi),则它们之间满足关系:
三边定位算法的优点是简单、易于实现,仅需3 个已知位置的基站及相应的基站与标签之间的距离测量即可 。它不依赖于复杂的信号处理算法,适用于不同环境和应用场景,且具有对测距误差容忍度相对较高的优势。
1.2.3 惯导技术
惯导技术是一种基于惯性传感器和滤波算法的定位技术,可用于人员定位系统中,提供准确的姿态和位置估计[25]。
惯导技术主要依赖于惯性传感器,包括加速度计和陀螺仪,用于测量人员的加速度和角速度。通过对这些测量值进行积分和滤波处理,可得到人员的姿态和位置信息。惯导模块不依赖导航卫星、无线基站及指纹数据库,仅通过人员佩戴的微型惯性传感器可实现人员的自主、连续、精确定位。在人员定位中,惯导技术的应用具有精度高、实时性强和自主性强等优势,通过测量加速度和角速度,实时计算人员的姿态和位置。相比于其他传感器,惯性传感器不依赖于外部的信号源,在井下、室内环境或信号受限的情况下具有更高的定位精度。
2 系统架构及硬件设计
2.1 系统架构
基于5G+UWB 和惯导技术的井下人员定位系统结合了5G 通信、UWB 测距和惯导姿态估计技术,旨在实现对井下人员的高精度定位。系统包括5G 通信模块、UWB 模块、惯导模块、数据处理单元和后台服务器,如图4 所示。通过布置多个UWB基站和配备惯性传感器,采集人员的距离、加速度和角速度数据,将采集到的数据经过预处理后,与UWB 定位结果进行融合,实现对人员位置和姿态的估计 。定位结果可通过用户界面进行展示,并可与地图集成,实现井下人员实时跟踪和监测。该系统可应用于井下人员安全管理、生产调度等领域,提供重要的定位支持和数据分析功能,为井下工作提供更高效、安全的管理和操作。
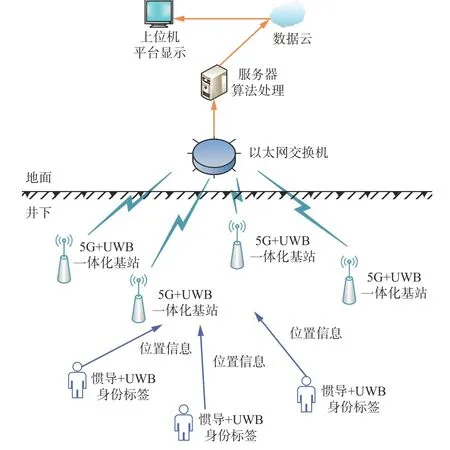
图4 基于5G+UWB 和惯导的井下人员定位系统架构Fig. 4 Network structure of underground personnel positioning system based on 5G + UWB and inertial navigation
目前我国运营商5G 主力频段见表2。为避免UWB 与5G 出现干扰,系统采用的UWB 频段与表2中5G 频段均不重叠。

表2 我国运营商5G 主力频段Table 2 Main frequency band of 5G in China
2.2 硬件设计
2.2.1 定位基站设计
系统定位基站主要由主控制器、5G 通信模块和UWB 模块组成。
1) 主控制器。使用CoolPi CM5 作为主控制器。
2) 5G 通信模块。使用RM500U-CN 模块作为5G 通信模块,RM500U-CN 模组内置GNSS 定位模块,可实现精准的位置定位和导航功能。
3) UWB 模块。使用DW1000 模块作为UWB模块,DW1000 模块采用IEEE802.15.4—2011 标准,可达到6.8 Mb/s 数据传输速率,功耗较低,可实现较长时间工作续航时间。
2.2.2 身份标志卡设计
身份标志卡是一种用于身份识别和定位的电子卡片或标签,由UWB 定位标签和惯导模块组成。它通常携带有唯一的身份信息,如身份证号码、工号、设备ID 等。在定位系统中,身份标志卡用于标志和跟踪特定个体或物体的位置,并提供与该身份相关的信息。
1) UWB 定位标签是一种小型、便携式的设备,内部集成了UWB 通信模块和定位算法,用于实现对个体或物体的高精度定位和跟踪。它可与UWB 定位基站进行通信,并通过测量与基站之间的距离来计算自身的准确位置。
2) 惯导模块通过测量和集成加速度计和陀螺仪等传感器的数据,计算物体的加速度、角速度、姿态和位置等信息,实现导航和定位功能。系统使用WTGPS-300 模块作为惯导模块。
3 融合惯导的卡尔曼滤波算法
3.1 基于惯导的人员位置估计算法
通过惯性传感器加速度计和陀螺仪测量人员的加速度和角速度,并对测量值进行积分和滤波处理,得到人员的姿态和位置信息。
1) 初始化加速度计及陀螺仪。使用加速度计测量标签在(x,y,z)轴上相对于传感器坐标系的加速度ax,ay,az。使用陀螺仪测量标签围绕(x,y,z)轴相对于传感器坐标系的角速度ωx,ωy,ωz。
2) 对加速度进行积分计算速度。用加速度积分公式计算标签在(x,y,z)轴上的速度vx(t),vy(t),vz(t)。
式中t为当前数据采集时刻。
3) 对速度进行积分计算位移。根据速度积分公式计算标签在各个轴上的位移bx(t),by(t),bz(t)。
3.2 基于卡尔曼滤波的UWB 位置估计与惯导人员位置估计融合
将基于惯导的人员位置估计作为预测值,基于UWB 的三边定位算法获取的人员位置估计作为观测值,利用卡尔曼滤波器将预测值和观测值进行融合,提高系统定位精度。
1) 状态初始化。初始化过程主要为初始化状态估计、过程噪声和测量噪声。在初始化状态估计时,设初始状态估计向量为X0,表示系统在时间步为0 的状态估计值,初始状态估计协方差矩阵为P0,表示系统在时间步为0 的状态估计协方差;在初始化过程噪声时,设过程噪声协方差矩阵为Q,表示系统动态模型中的噪声;在初始化测量噪声时,设测量噪声协方差矩阵为R,表示测量模型中的噪声。
2) 状态及协方差预测。首先进行状态预测,利用系统的动态模型和控制输入,通过状态转移矩阵和控制矩阵预测系统下一时刻状态,之后利用状态预测误差协方差矩阵、系统噪声协方差矩阵和状态转移矩阵,预测系统状态的协方差矩阵。
3) 状态更新。首先,利用观测矩阵H及状态预测值,预测系统状态的测量值;然后,利用协方差矩阵的预测值、观测矩阵H、测量噪声协方差矩阵R,计算卡尔曼增益矩阵Kk;计算实际测量值与预测测量值之间的残差,即观测残差,利用观测残差、卡尔曼增益矩阵Kk及状态预测值,更新得到当前时刻状态值;最后,利用卡尔曼增益矩阵Kk、观测矩阵H及协方差矩阵的预测值更新系统状态的协方差矩阵。
4) 重复预测和更新步骤。重复执行预测和更新步骤,根据新的测量数据和先验信息更新状态估计和协方差矩阵。
4 系统测试
4.1 测试环境与基站布局
测试环境为煤矿主体实验基地,现场如图5 所示,测试环境与基站布局如图6 所示,平面图左下角为坐标原点(0,0),以原点为起点,水平向左表示横轴正方向,竖直向上表示纵轴正方向。使用激光测距仪进行距离测量,分别在实验基地的(0,0),(99.7,0),(0,99.4),(98.6,99.2) m 4 个位置装设定位基站A—D,基站之间存在不同规模的障碍物、井下工作设备等。

图5 煤矿主体实验基地现场Fig. 5 On-site of the main experimental base of the coal mine
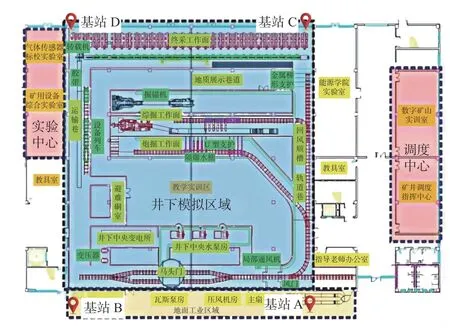
图6 测试环境与基站布局Fig. 6 Test environment and base station layout
4.2 算法测试与分析
为验证融合惯导的卡尔曼滤波算法在井下定位中的可行性,使用UWB 定位系统采集180 s 时长的距离数据,并计算对应位置。从采样数据中随机筛选60 个坐标点进行数据分析 ,对卡尔曼滤波、加权最小二乘、融合惯导的卡尔曼滤波算法进行对比实验,结果如图7 所示。可看出在x轴和y轴,融合惯导的卡尔曼滤波算法得出的位置信息和真实位置信息的重合度最高,说明融合惯导的卡尔曼滤波算法得出的位置信息最接近真实位置。
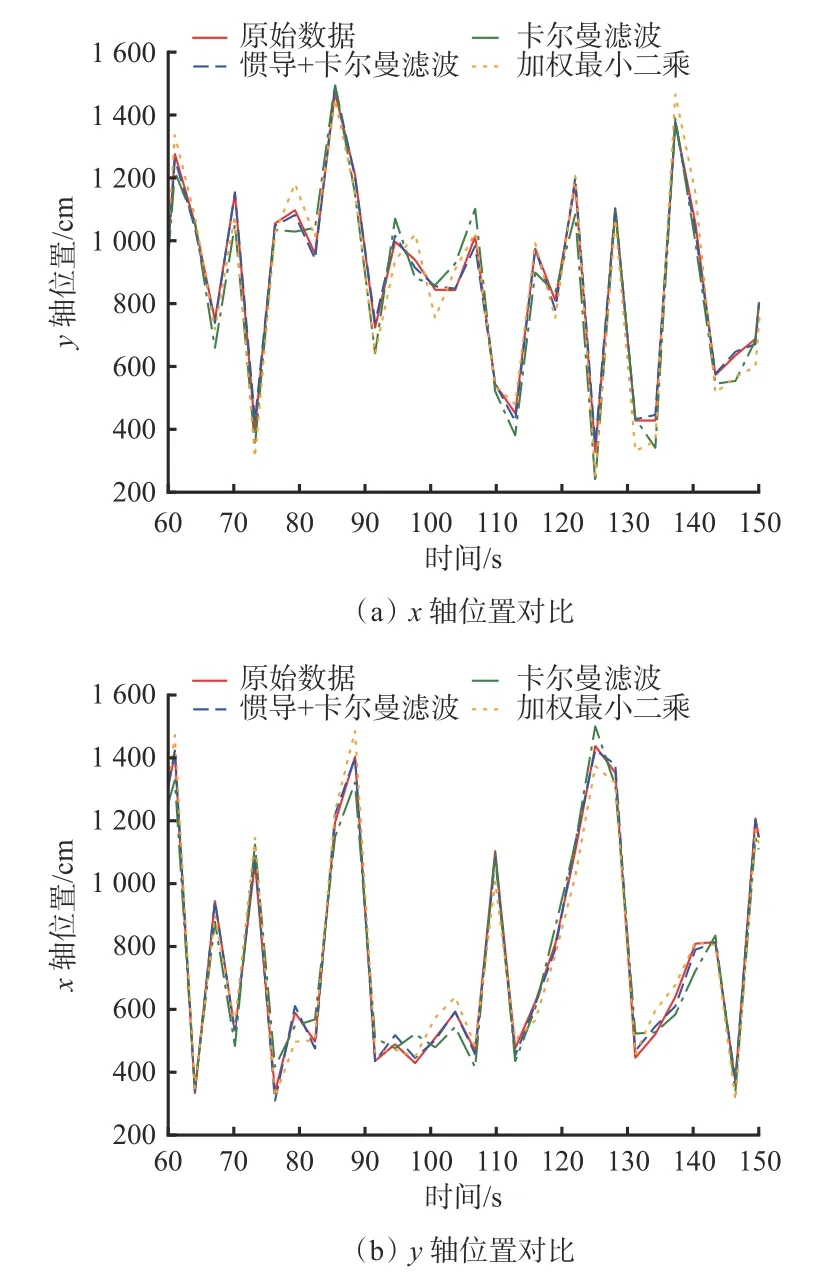
图7 不同算法定位结果对比Fig. 7 Comparison of positioning results of different algorithms
真实位置坐标及通过定位算法计算的位置坐标对比见表3,可看出融合惯导的卡尔曼滤波算法具有最高的定位精度,平均误差为22.192 cm。
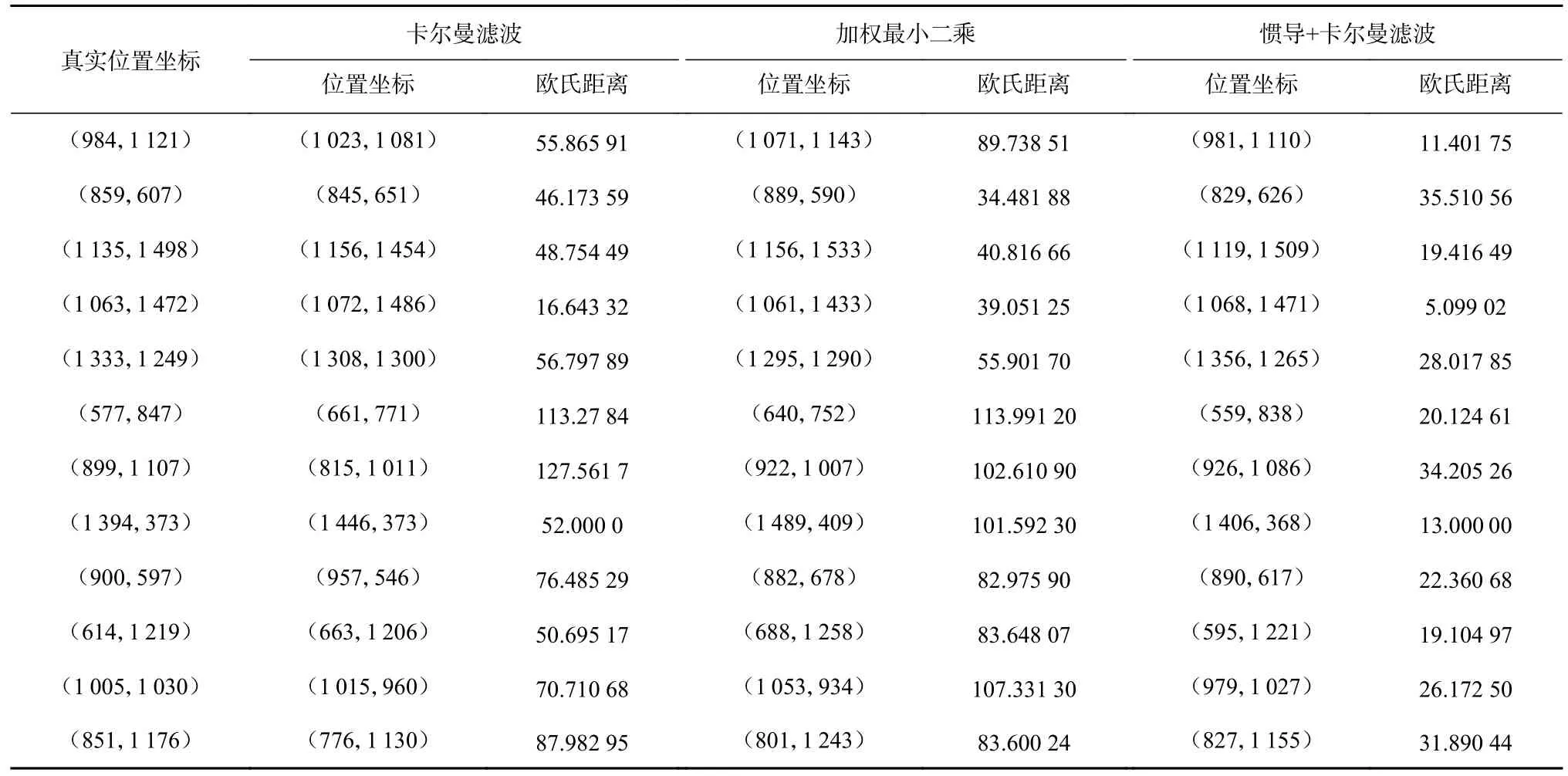
表3 算法定位结果及误差Table 3 Algorithm positioning results and errorcm
4.3 系统定位测试与分析
通过实验测试多个标签同时工作对定位精度的影响,从而分析系统定位的可行性和可靠性。先进行基准测试,在单个定位标签的情况下,记录系统的初始精度和稳定性,再启动3 个定位标签,同步记录定位标签的位置信息。3 个标签同时定位时,x轴和y轴上真实位置与系统定位位置对比结果分别如图8、图9 所示。
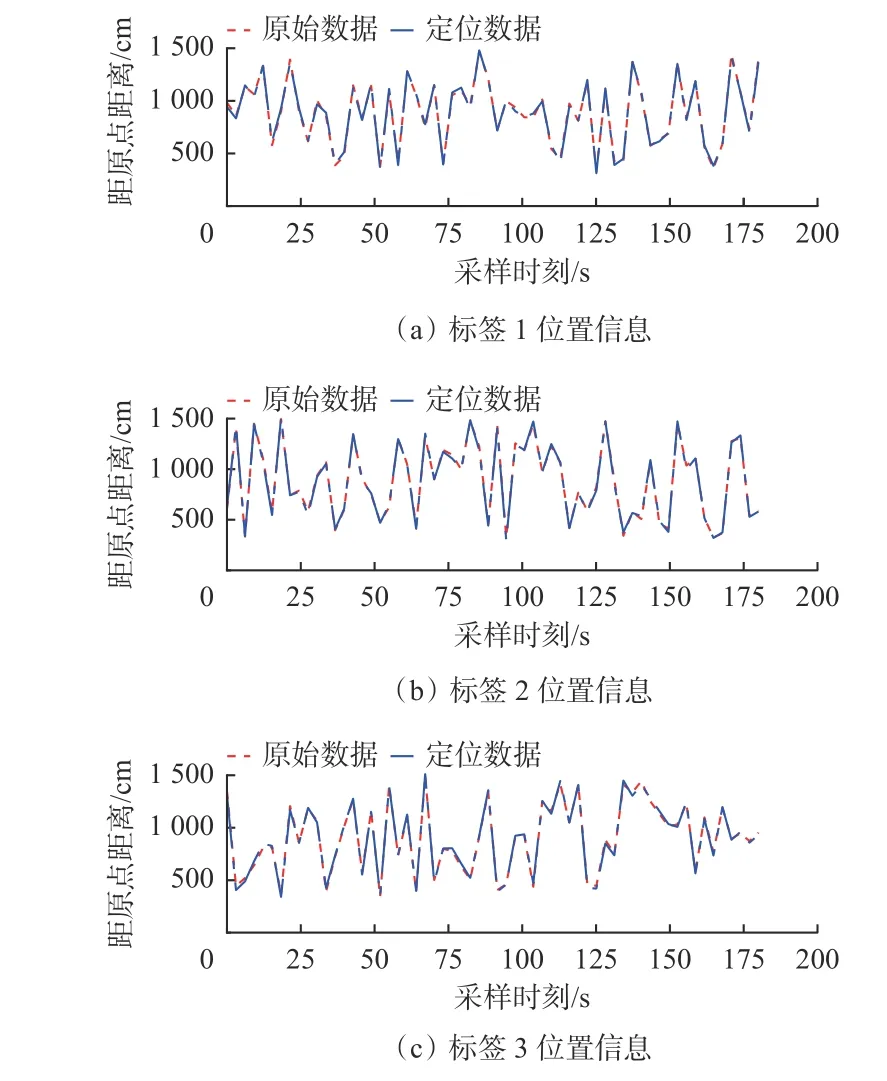
图8 x 轴位置对比Fig. 8 x-direction position comparison

图9 y 轴位置对比Fig. 9 y-direction position comparison
由图8 和图9 可看出,5G+UWB 和惯导技术组合的井下人员定位系统的位置信息和真实位置信息的重合度最高,说明本文系统的位置信息最接近真实位置。
3 个标签的真实位置坐标及通过定位算法计算出的位置坐标见表4、表5。其中,x1为x轴真实位置,x2为x轴定位位置,E1为x2到x1的距离,即x轴定位误差,y1为y轴真实位置,y2为y轴定位位置,E2为y2到y1的距离,即y轴定位误差。

表4 x 轴真实位置坐标与定位位置坐标的定位误差Table 4 Location error between the true position coordinates and position position coordinates of the x-axiscm

表5 y 轴真实位置坐标与定位位置坐标的定位误差Table 5 Location error between the true position coordinates and position position coordinates of the y-axiscm
由表4 和表5 可看出,在12 组数据中,定位位置与真实位置的距离误差为[15 cm,20 cm],x轴最大平均误差为26 cm,y轴最大平均误差为24 cm,超过目前大多数井下定位系统的精度,证明本文系统具有较高的精度。
5 结论
1)通过布置多个UWB 基站和配备惯性传感器,采集人员的距离、加速度和角速度数据,将采集到的数据经过预处理后,与UWB 定位结果进行融合,实现对人员准确位置和姿态的估计。融合惯导的卡尔曼滤波算法得出的位置信息和真实信息的重合度最高,平均误差为22.192 cm。
2) 将基于惯导的人员位置估计作为预测值,基于UWB 的三边定位算法获取的人员位置估计作为观测值,利用卡尔曼滤波器将预测值和观测值进行融合,提高井下人员系统定位精度。定位位置与真实位置的距离误差为[15 cm,20 cm],超过目前大多数井下定位系统的精度。
3) 井下人员定位系统实现了高精度的定位,并具备较好的抗干扰能力。然而,该系统仍存在一些改进空间。例如,5G 信号在井下环境中的覆盖范围和传输性能仍需进一步优化。此外,对于惯导技术,需解决误差累计和振动干扰等问题,以提高定位精度和稳定性。
