基于等效地球半径的超短波超视距时差定位方法
2024-02-29仇旭东张海瑛窦修全
仇旭东,张海瑛,窦修全
(1.中国电子科技集团公司 第54研究所,石家庄 050081;2.河北省电磁频谱认知与管控重点实验室,石家庄 050081)
0 引言
相比短波信号而言,超短波信号的抗干扰能力更强,频带利用率更高,信道更加稳定,并且超短波通信设备更加轻便灵活,便于操作和携带,更加适用于各种作战环境和部队移动通信,因此,超短波通信在军事领域应用非常广泛[1]。随着我国无源超视距侦测系统的不断发展,信号侦收的有效距离得到大幅提升,大大提高了我国周边区域的信号侦察能力。侦测系统所截获的超视距信号,其中一些来自敌方高价值的超短波辐射源,对这些辐射源目标实现精确定位可以为我军在战场上占据主动提供强力支撑。
目前超短波超视距传输信道主要分为两种:一种是大气波导,另一种是对流层散射。其中,大气波导[2]是指电磁波在靠近海平面传播时,由于受到大气折射的影响,导致其传播轨迹的曲率大于地球表面曲率,致使部分电磁波陷获在一定高度的大气层中,形成大气波导传播,只有当电磁波发射仰角小于临界仰角且电磁波的频率高于截止频率时,才会产生大气波导现象,通常发生在超短波频率较高的频段或者更高的微波频段。而对流层散射通信[3]是指电磁波利用对流层中不规则散射体的散射作用来实现超视距传输,通常发生在超短波频段。本文考虑的是在超短波超视距无线信道背景下的定位场景,对更高频段的微波以及发射仰角没有特殊要求,因此选择以对流层散射传输为主导来研究无线信道模型。
目前常用的定位方法,按照不同的定位参数,主要可以分为以下几类:1)基于相位差变化率定位法[4-6],该方法利用相互正交的相位干涉仪接收辐射源目标电磁信号的相位差,来获得目标的角度信息,再利用相位差的变化率来获得目标的距离信息,从而实现对目标的定位。此方法虽然精度较高,但易受信号波动影响,对多径效应敏感,算法复杂度也比较高;2)基于多普勒频差定位法[7-9],该方法首先测定目标与定位站的相对速度,然后根据多普勒频移效应,计算出目标到定位站的距离差,从而构成两个以上的双曲面,通过双曲面的交点从而得到目标的位置。此方法需要高精度的频率测量设备,且辐射源和接收设备之间的相对速度会对定位精度产生影响;3)测向交叉定位法[10-11],该方法采用干涉仪测角原理,通过测量电磁波来波方向来测定目标相对于定位站基线的方位角,不同基线的定位站测出不同的方位角,不同方位角对应的指向线相交即可获得目标的位置,此方法结构简单,但定位精度受限于测向精度,对超视距目标定位效果不佳;4)时差定位法[12-14],该方法通过多个定位站测量电磁波信号到达各定位站的时间差,每个时间差确定一条对应的双曲线,多个时间差所对应的多条双曲线交会,从而得到目标的位置信息。此方法原理简单、精度高、实时性强,适用于超视距目标定位。相比于其他定位方法,时差定位法在处理复杂的多目标场景时也可以获得较高的定位精度,因此,在许多实际应用场景中,时差定位法被广泛采用。
对超短波时差定位方法进行无线传输信道的建模研究时,目前大多采用的是视距模型,但实际侦收到的超短波信号,许多来自数百公里之外的辐射源,由于受到地球曲率、对流层散射的影响,若继续采用视距模型进行定位,将会产生较大的定位误差。部分学者针对超视距信道模型进行了研究,钟丹星等人[15]针对简单球面模型在时差定位系统中存在误差较大的问题,通过采用WGS-84地球椭球模型,建立目标位置的约束方程,有效提高了定位精度。王智显等人[16]针对超视距目标采用平面时差定位误差较大的问题,将信号经对流层散射的传输路径近似为在一个等效球面上的弧线,相比平面时差定位,有效降低了定位误差。李娟慧等人[17]分析了对流层散射点位置的不确定性对超视距无源定位精度的影响,认为散射点位置的不确定度会带来相应的时差不确定度,从而影响超视距定位精度。杨豪强等人[18]介绍了一种通过数学积分的方法来计算电磁波在对流层散射传播的轨迹,但在0°仰角附近计算比较困难。刘成国等人[19]使用高阶Runge-Kutta数值微分解法,对电磁波在对流层散射中的射线描迹进行模拟计算,避免了0°仰角附近难以计算的问题。无论是积分还是微分方法计算路径长度,都无法直接构建定位方程组,于是王翔等人[20]建立了一种镜面反射模型,认为信号从目标到散射体与散射体到定位站的传播路径是镜面对称的直线路径,在此模型下对时差定位的精度进行了仿真分析。为了将对流层散射传输路径进行更好的近似,裴旭等人[21]对等效地球半径模型与实际地球模型之间参数的对应关系进行了理论推导,证明在该模型下,可以简单有效地描述电磁波经对流层散射的传输路径。
本文在以上研究的基础上,以实际应用背景和需求为牵引,针对传统视距模型下对超短波超视距目标定位精度不高的问题,采用WGS-84地球椭球模型,同时引入对流层散射对传输路径的影响,建立基于地球等效半径的对流层散射传播路径的数学模型,由此建立全新的到达时差(TDOA,time difference of arrival)定位方程组,通过Chan算法与牛顿迭代法相结合对该非线性方程组进行求解,从而获得目标的位置信息。
1 超短波超视距条件下信道模型的构建与修正
1.1 对流层散射传输模型
基于对流层散射的超短波超视距传输模型如图1所示。目前针对超短波辐射源目标的定位体制,大都采用视距模型,即目标P与定位站M之间的水平距离d作为超短波信号的传播路径来构建定位模型,但实际的超短波超视距信号经对流层散射由路径Lp和Lm到达定位站,如果继续采用视距模型,势必会给超视距目标的定位结果造成不可忽略的误差,并且该误差会随着目标与定位站之间的距离越远而越大,甚至直接导致定位失败。因此,对超短波超视距目标进行定位时,需要精确建立辐射源目标到定位站之间的非直线传播路径的数学模型,从而构建准确的时差定位方程组以提高定位精度。

图1 对流层散射传输模型示意图
1.2 基于等效地球半径模型的对流层散射信道修正
在基于对流层散射的超短波超视距传输模型下,信号经大气折射的作用,其实际传输路径是一条十分复杂的曲线,通过数学方法直接求解其长度几乎不可能,但也不能简单认为是辐射源到对流层散射点以及对流层散射点到定位站的直线路径,需要将该直线路径进行修正,使其接近真实路径,所以考虑使用一种求解等效传输路径的方法来近似得到真实的路径长度。
大气折射指数受大气中温度、湿度、气压等环境因素的影响,具有明显的分层现象,且认为在各层中大气折射率不变。对于平均高度为8~12 km的对流层来说,其内部分层效应并不明显,因此可以认为大气折射指数在对流层中是一个常数[22]。基于以上分析,本文利用等效地球半径模型对超短波信号的传输路径进行修正,该方法可以使超短波信号在对流层中复杂的传输路径得到极大的简化。如图2所示,将实际地球模型下不规则的曲线路径Lp+Lm近似为在等效地球半径模型下的直线路径Lpk+Lmk。实际地球半径为OP=R0,等效地球半径为OPk=Rk=kR0,球心角对应关系为α=kαi,k为等效地球半径系数。根据Snell定理得到:
(1)
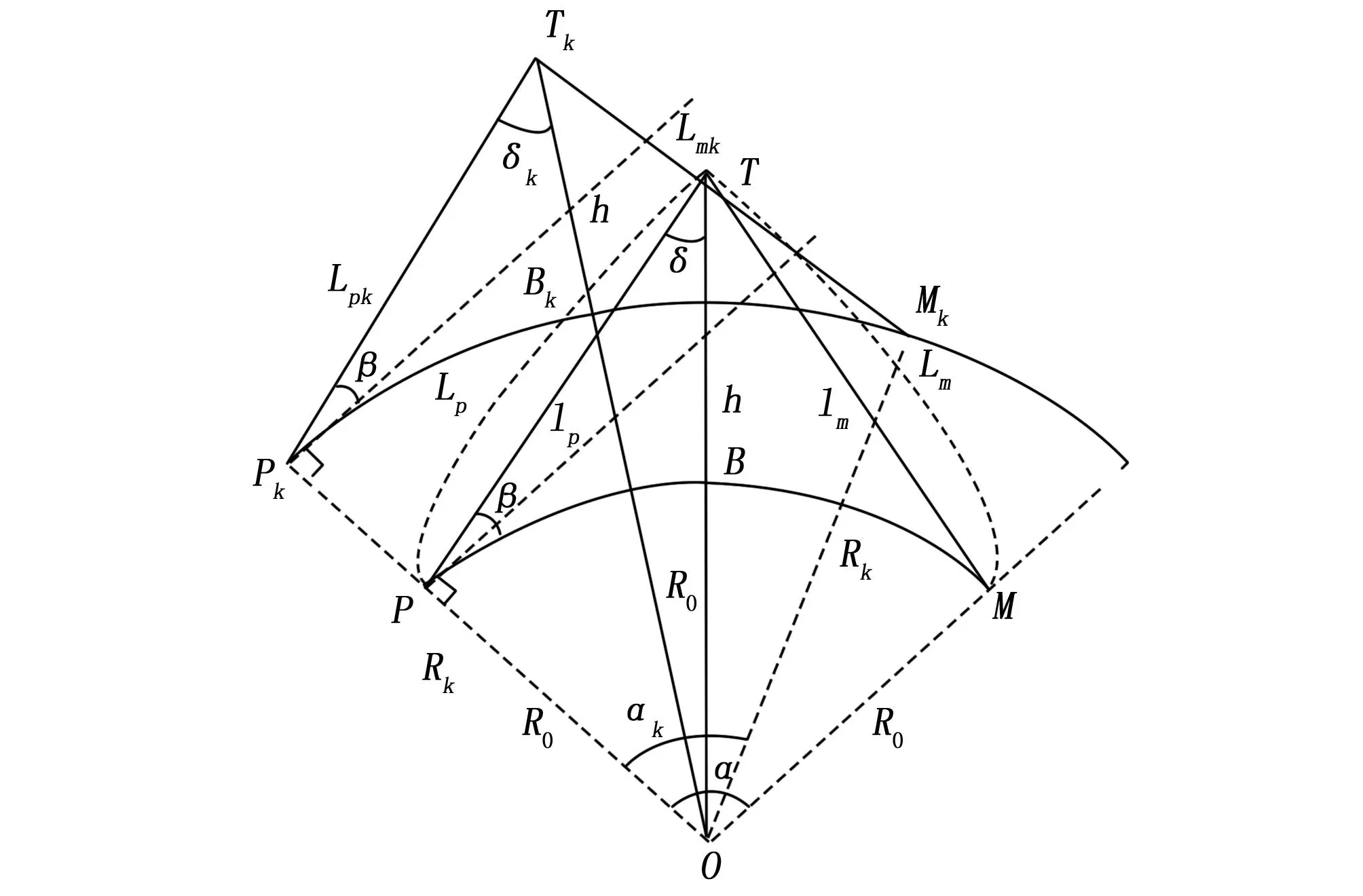
图2 等效地球半径模型与实际地球模型
式中,n为对流层散射点T处的折射指数,其值范围为1.000 24~1.000 40,dn/dh为对流层的折射指数梯度,反映的是折射指数随高度的变化关系,在标准大气下,其值为-0.039×10-6/m,hp为发射端天线的高度。
本文研究的是位于地表的目标,不考虑天线高度影响,因此hp= 0。所以,式(1)可以写为:
(2)
在实际地球模型中:辐射源目标位于地球表面P处,其辐射的超短波信号到定位站M的传输路径为Lp+Lm。通过式(2)计算出等效地球半径系数k≈ 1.331,用等效地球半径模型代替实际地球模型。在等效地球半径模型中:Pk对应点P,Tk对应点T,Mk对应点M,Lpk+Lmk对应实际信号传输路径Lp+Lm。
在实际地球模型下,在△OPT中,由正弦定理,可以求得目标P到定位站M之间的直线距离:
l=lp+lm=
(3)
在等效地球半径模型下,在△OPkTk中,由正弦定理,可以求得Pk到Mk的长度L为:
L=Lpk+Lmk=
(4)
式(4)为实际地球模型中信号的真实传输路径Lp+Lm,R0为地球赤道半径,h为对流层散射点距地面的高度,α为辐射源目标到定位站距离所对应的地心角。
2 基于等效地球半径模型的TDOA定位优化算法
2.1 经纬度坐标与地心直角坐标坐标系转换
地心直角坐标系就是常用的笛卡尔空间直角坐标系,该坐标系以椭球球心为坐标原点,本初子午面与赤道交线为X轴,椭球南北方向的旋转轴为Z轴,赤道面与Z轴正交方向为Y轴,三轴构成右手坐标系。大地经纬度坐标系就是常用的经纬度与高度坐标,纬度是线面角,是坐标点的法线与赤道面的夹角,所以纬度范围为[-π/2,π/2],北纬为正,南纬为负;经度是面面角,是坐标点所在子午面与本初子午面的夹角,所以经度范围为[-π,π],东经为正,西经为负。两种坐标系表达的都是空间中的同一点,二者可以相互转化。从大地经纬度坐标转换为地心直角坐标:
(5)
其中:x,y,z为地心直角坐标系下的坐标,J,W,H为大地经纬度坐标系下的坐标,分别为经度、纬度和高度;e为WGS-84椭球模型的离心率;Rl为目标位置卯酉圈半径,其计算公式为:
(6)
其中:R0为地球赤道半径,地心直角坐标系中的点(x,y,z)满足如下关系式:
(7)
从地心直角坐标转换为大地经纬度坐标:
(8)
(9)
(10)
本文考虑对位于地表的超视距辐射源目标进行定位,故设高度H= 0。于是式(7)可以简化为:
(11)
以上为空间直角坐标系与大地经纬度坐标系之间的转换关系。在实际工程中,辐射源的位置信息与定位站的站址信息均以大地经纬度坐标系下的经度、纬度和高度来表示,为了使算法中计算过程简洁明了,故先将辐射源和定位站的位置坐标转化为空间直角坐标系下的坐标,最后计算完成后,再逆变换为大地经纬度坐标系下的经度、纬度和高度。
2.2 基于修正模型的TDOA定位方程组求解原理
首先进行Chan算法的理论推导。当定位站数量为3个时,时差定位系统由一个主站及两个辅站构成,各站的空间位置为(xi,yi)T,(i= 0,1,2),i= 0表示主站,i= 1,2分别表示两个辅站。设目标位置为(x,y)T,ri表示目标与第i站之间的距离,Δri表示目标到第i个辅站与到主站之间的距离差。根据时差定位原理,构建时差定位方程组为:
(12)
式中,c= 3×108m/s,ti为信号到达第i个辅站与到达主站的时差测量值,称为第i站的TDOA测量值。对该方程组的求解过程如下:
将式(12)整理化简后可得:
(x0-xi)x+(y0-yi)y=ki+r0Δri
(13)
其中:
(14)
当i分别取1、2时,得到的两个方程构成了一个非线性方程组。为了求解该方程组,把r0看作是一个已知量,将上式写成矩阵形式:
AX=F
(15)
其中:
(XTAT-FT)(AX-F)=
XTATAX-FTAX-XTATF+FTF=
XTATAX-(ATF)TX-XTATF+FTF
(16)
令其偏导为0,即:
2ATAX=2ATF
X=(ATA)-1ATF
(17)
于是求得方程AX=F的最小二乘解为:
(18)

代入式(18),可以得到:
(19)
式中,
(20)
(21)
式中,
(22)
可以求得:
(23)
在利用3个定位站对地表辐射源目标进行定位的情况下,除了两个时差方程,还需要第三个方程:地球表面方程,作为辐射源位置的约束条件。于是,定位方程组可以写成:
(24)

(25)
整理化简得到:
AX=F
(26)
其中:
此时,可以利用式(15)~(23)推导的Chan算法求解过程对式(26)进行求解,获得目标位置的信息,然后将该位置信息作为初值,采用牛顿迭代法进行迭代,实现目标位置信息的精确求解,过程如下:
将两个时差方程和标准椭球方程改写成如下形式:
(27)
其中:S2= [x2,y2,z2],令P(S)= [P1,P2,P3]T,对其进行求导得:
(28)
迭代公式:
Sk+1=Sk-[P′(Sk)]-1P(Sk)
(29)
终止条件:
[(Sk+1-Sk)(Sk+1-Sk)T]1/2<ε
(30)
ε为一个很小的正值。
当使用基于等效地球半径模型对对流层散射路径进行修正时,只需将上述求解过程中ri的计算式用式(31)代替即可:
(31)
其中:k为等效地球半径系数,R0为地球赤道半径,h为对流层散射点高度,αi为辐射源目标距第i个定位站距离所对应的地心角。
2.3 定位性能理论推导
为验证本文所提定位方法的有效性,用几何精度因子(GDOP,geometric dilution of precision)来衡量定位性能,GDOP值越小,时差定位的精度就越高,本小节对时差定位的GDOP求解过程进行推导。
对式Δri=ri-r0,(i= 1,2,…,m)等号两边求微分得到:
d(Δri)=(fix-f0x)dx+(fiy-f0y)dy+(fiz-f0z)dz+(k0-ki)
(32)
其中:
(33)
写成矩阵形式dΔr=fdr+k,其中:
(34)

令:
(fTf)-1fT=B=[bij]3×3
(35)
则有:
(36)
由该式可知,定位误差dr与测时误差、站址误差、辐射源目标相对各定位站位置有关。各时差测量都包含主站的测量误差,因此Δri的误差是相关的。各定位站均为固定站,因此站址误差互不相关。于是定位误差的协方差矩阵为:
B{E[dΔr·dΔrT]+E[k·kT]}BT
(37)
式中,
(38)
(39)

(40)

代入式(39)可得:
(41)
令E[dΔr·dΔrT]+E[k·kT]= [σij2]3×3,把式(38)和(41)代入,有:
(42)
于是,时差定位的GDOP为:
(43)
3 仿真验证与分析
3.1 仿真条件
采用WGS-84地球椭球模型,椭球第一偏心率的平方e2= 0.006 694 379 990 13,地球赤道半径R0= 6 378.137 km。主站位置为(E114°,N38°),以主站为圆心,作半径为50 km的距离圆,两个辅站位于该距离圆上,通过改变两个辅站与主站正北方向的夹角,便可以改变三站的相对位置。本仿真两个辅站位置分别位于主站正北方向顺时针旋转60°与逆时针旋转60°处,即两个辅站与主站基线夹角为120°,3个站的位置坐标如表1所示。
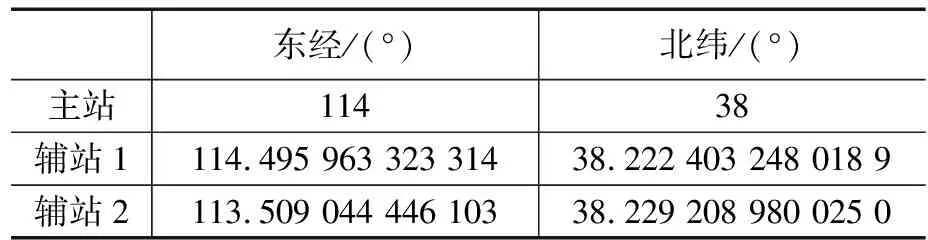
表1 三站位置坐标
3.2 时差测量精度对定位性能的影响分析
定位站为固定站,其位置信息由北斗或GPS系统提供,精度通常在5 m以内,所以站址误差可以忽略不计。因此在定位站分布不变的情况下,时差参数是影响定位精度最重要的因素,因为时差信息中包含着目标与定位站之间的距离信息,直接影响着时差定位方程组的解算结果。分别设时差精度为100 ns和200 ns,画出不同时差精度下的GDOP误差分布曲线,如图3所示。

图3 不同时差精度对定位精度影响
由图3可知,时差精度对定位精度的影响很大,在定位站为固定站时,时差精度越高,定位精度也越高,相应的无解区域也会更小,并且当目标与定位站距离一定时,其相对定位站的方向对定位精度的影响也很大。因此,在实际工程中,提高时差精度是提高定位精度的有效方法,当定位站数量足够多时,根据信号方向选取合适的定位站也可以有效提高定位精度。
3.3 镜面反射模型与本文修正模型的定位性能对比
镜面反射模型[20]虽引入非视距引起的距离误差,但并未考虑实际信号经对流层散射的传输路径为曲线,而是将目标到散射点、散射点到定位站这两段路径视为镜面对称的两条直线,在此模型下信号的传输路径为:
L=lp+lm=
(44)
通过3.2节的仿真分析可知,时差测量误差会影响定位精度,该时间误差反映到空间上,对应于信号不同传输路径的距离差。对于多站定位来说,每个定位站收到的信号所对应的传输路径不同,因此只有准确估计信号在不同定位站下对应的传输路径,才能提高定位精度。为此本文提出使用等效地球半径法将对流层散射传输路径进行修正,通过对流层高度与折射梯度计算出等效地球半径系数k,由1.2节推导出信号在该模型下的传输路径为:
L=Lp+Lm=
(45)
下面对这两种对流层散射时差定位模型进行仿真和对比分析,来验证本文所提方法的有效性。设目标经度范围为E112~E116°,纬度范围为N41~N44°,主站到目标区域距离范围为333.6 ~687.9 km,符合超视距定位的背景。时差测量误差为10 ns,对流层散射点距地面高度设为10 km,不考虑站址误差与接收天线的高度,对上述两种模型下时差定位的GDOP进行仿真,结果如图4、图5所示。
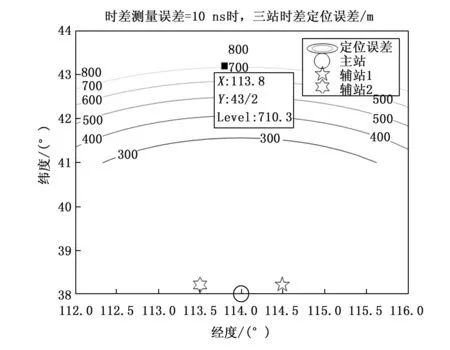
图4 镜面反射模型下定位误差
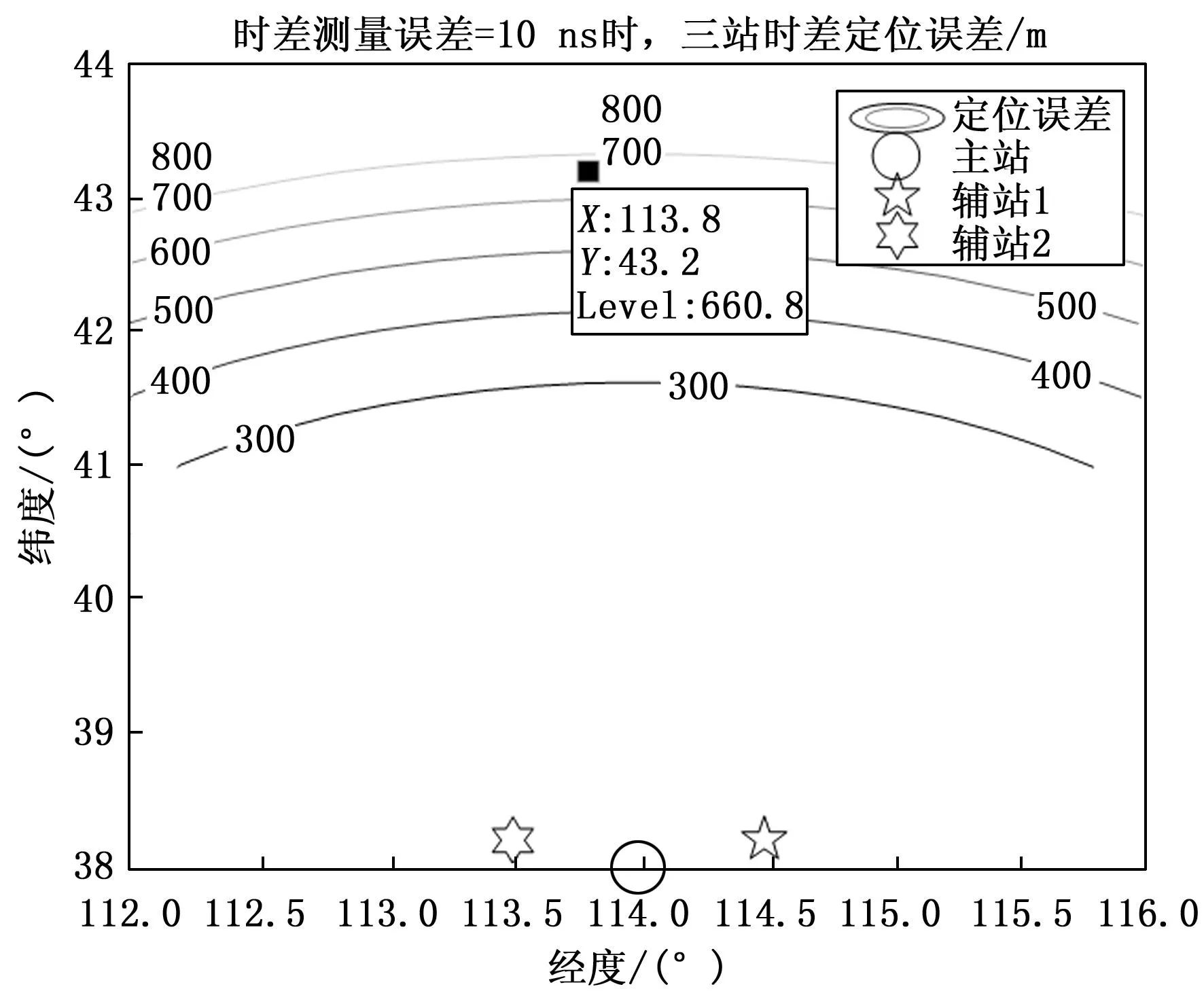
图5 等效地球半径模型下定位误差
由图可知,当定位站和时差测量误差不变时,对同一位置目标进行定位时,采用等效地球半径模型的定位误差更小,当目标位置为(E113.8°,N43.2°)时,镜面反射模型的定位误差为710.3 m,等效地球半径模型的定位误差为660.8 m,定位误差降低了6.97%。
下面分析当目标与定位站方位角不变时,不同距离下等效地球半径模型对定位误差的影响,结果如表2所示,当目标与定位站距离接近视距范围时,等效地球半径模型与镜面反射模型定位误差比较接近,随着目标与定位站的距离越来越远,等效地球半径模型的优势越发明显,当目标与定位站距离为600 km时,等效地球半径模型的定位误差大约降低了7.79%,证明该模型在超视距定位背景下有更好的定位精度。
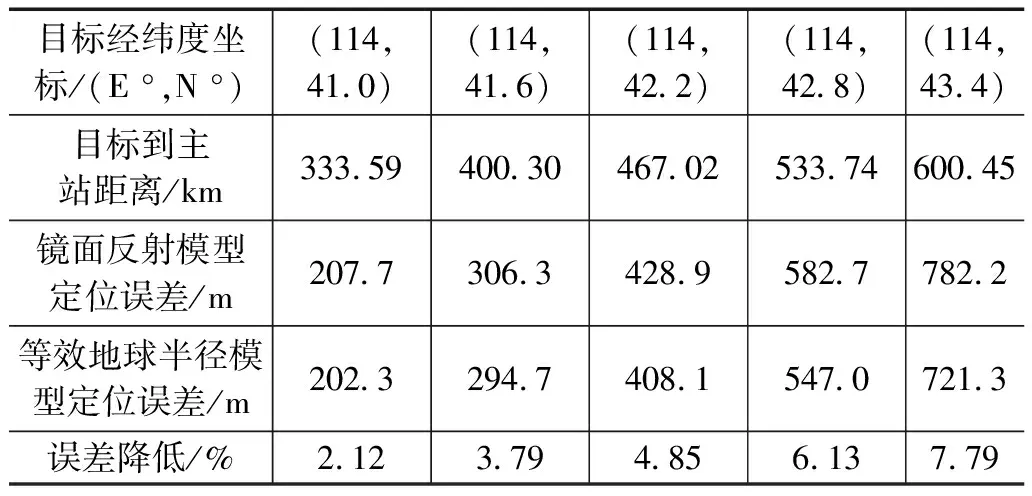
表2 不同距离下等效地球半径模型对定位误差的影响
4 结束语
本文研究了对流层散射信道下的超短波超视距时差定位方法,在考虑地球曲率对定位精度影响下采用WGS-84椭球模型的同时,通过地球等效半径模型,构建了全新的对流层散射信道的数学模型,突破了地面定位站对视距目标定位的限制。通过Chan算法与牛顿迭代法相结合,实现了对超短波超视距目标位置信息的有效解算。通过试验仿真分析了时差测量误差对定位精度的影响,并且将等效地球半径模型与传统镜面反射模型进行对比,结果表明在超视距定位场景下,通过等效地球半径模型建立的信号传输路径更加接近实际,可以有效降低定位误差,具有一定的工程应用价值。在此基础上,之后的研究可以考虑对流层散射点高度对时差定位精度的影响,对信道模型进行进一步的修正,使定位结果更加准确。
