无人机可见光遥感影像地物目标提取技术研究
2024-02-29李华,李国
李 华,李 国
(1.四川信息职业技术学院,四川 广元 628000;2.成都华微电子科技股份有限公司,成都 610015)
0 引言
可见光遥感是指传感设备工作波段保持在0.38~0.76 μm之间(可见光波段范围)的无人机遥感技术,是无人机航空测绘中最常应用的技术手段。利用可见光遥感技术能够获得多种影像类型,且同一类影像的一个像素可以对应多个对象,使得可见光遥感影像的质量大幅提升[1]。相较于常规的无人机遥感技术,可见光遥感对于感光胶片感色范围的要求相对较低,只要确保胶片不出现过度曝光的情况,即便是在感光性极弱的情况下,也可以获得较为清晰的遥感影像。无人机可见光遥感影像地物目标的边界清晰度与景观分布密切相关,在景观分布较为密集的情况下,不能保证地物目标对象边界的清晰度。另外,传感器在0.38~0.76 μm的波段范围时,一部分传感光线可能会投射在地物目标外部,使得较小地物景观外部存在一部分的像素空缺区域,若传感器元件的目标提取位置在此部分空缺区域时,由于像素单位的不完整,必然会出现模糊的边界轮廓,导致地物目标提取难度增大,因此,研究地物目标提取技术。
孙晓宇等[2]提出基于多通道数据融合的地物目标提取方法。通过叠加和类IHS变换两种方法,对无人机遥感RGB影像进行融合处理,联合DeepLabv3+卷积神经网络,实现对影像地物目标的提取。宋忠浩等[3]提出基于加权策略的高分辨率遥感图像目标提取方法。利用加权策略改进YOLOv3遥感图像目标检测模型,根据图像特征挖掘结果,确定目标的表现尺度条件,以便于传感器主机能够对景观目标进行提取。然而上述两类方法的应用能力有限,不足以保证目标提取的清晰度。
为此,提出无人机可见光遥感影像地物目标提取方法,通过对比实验的方式,突出该方法的实际应用能力。
1 获取无人机可见光遥感影像特征
无人机可见光遥感影像特征包括光谱特征、纹理特征、边缘特征三部分,分别对其进行获取与分析。
1.1 无人机可见光遥感影像光谱特征获取
无人机可见光遥感影像光谱特征反映出了无人机可见光遥感影像的视觉特性,由于每种地物目标对于可见光信号的感知能力不同[4],因此其均具有独特的光谱特征。相较于纹理特征和边缘特征,可见光遥感影像光谱特征的稳定性更好,且在可见光照射强度保持不变的情况下,平移、旋转、缩放等操作都不会影响像素节点的分布[5]。对于无人机上搭载的传感器元件而言,依照光谱特征描述遥感影像中的像素节点,既可以适应可见光照射强度,又不会对像素节点的表现形式造成影响。
传感器元件所绘制无人机可见光遥感影像为多光谱图像,每一个像素节点都包含了丰富的光谱信息,除了常见的红、黄、蓝3个基础波段光谱外,可见光遥感影像中还包含紫、橘、绿、黑4个过渡融合光谱,且不同光谱中的像素特征不会发生混合[6]。设红色波段光谱内的像素特征为X1,黄色波段光谱内的像素特征为X2,蓝色波段光谱内的像素特征为X3,红、蓝(紫色)波段光谱的融合参数为α1,红、黄(橘色)波段光谱的融合参数为α2,黄、蓝(绿色)波段光谱的融合参数为α3,红、黄、蓝(黑色)3个波段光谱的融合参数为α4,联立上述物理量,无人机可见光遥感影像的光谱特征如公式(1)所示:
(1)

同一幅可见光遥感影像中不会出现与光谱特征完全相反的地物目标,即同一幅可见光遥感影像中,q>0和q<0不可能同时成立。此外,q=0表示当前遥感影像中不存在光谱特征,不符合可见光照射下地物目标的映射规律,所以该项取值条件不可能成立。由此完成无人机可见光遥感影像光谱特征获取。
1.2 无人机可见光遥感影像纹理特征获取
随着无人机可见光遥感成像技术的不断进步,地物影像的空间和光谱分辨率会显著提升,使得越来越多的地物细节能够清晰呈现。为此,在获取光谱特征后,需要利用纹理特征描述无人机可见光遥感影像的可视化程度。可见光遥感影像中包含了大量与地物目标相关的信息,纹理特征能够弥补光谱信息在视觉性方面的缺失[7]。锐化处理会使得纹理特征更加明显,提高影像地物目标的聚焦程度和清晰度,从而使得特定遥感区域的色彩更加鲜明[8]。锐化处理前、后无人机可见光遥感影像纹理特征如图1和图2所示。

图1 锐化处理前的无人机可见光遥感影像纹理特征

图2 锐化处理后的无人机可见光遥感影像纹理特征

(2)
βδ的取值属于(-∞,0)∪(0,+∞)的数值区间,其中βδ<0成立表示锐化处理后可见光遥感影像纹理特征会减弱,βδ>0成立时,表示锐化处理后可见光遥感影像纹理特征会更加明显。为此,在进行纹理特征求解时,βδ的取值只能属于(0,+∞)的数值区间,完成无人机可见光遥感影像纹理特征获取。
1.3 无人机可见光遥感影像边缘特征获取
无人机可见光遥感影像纹理特征能够提高地物目标清晰度,因为边缘为整幅影像中地物目标信息最为集中的区域,所以获取边缘特征,进一步提高清晰度。边缘特征是无人机可见光遥感影像中最重要的特征,因为影像边缘在保留重要像素信息的同时,减少了地物目标相关像素对象总量,所以即便是在节点数量相对较少的情况下,只要保证像素信息之间不发生相互覆盖,就可以实现无人机可见光遥感影像边缘特征的确切分析。无人机可见光遥感的视觉理论认为边缘是传感器感知地物目标的重要信息,在遥感影像中,边缘只存在地物目标的主题信息交界处[9],能够反映出像素类项之间的信息突变关系,是整幅影像中地物目标信息最为集中的区域。
无人机可见光遥感影像边缘特征的求解如公式(3)所示:
(3)

在获取无人机可见光遥感影像边缘特征时,传感器元件对于边缘区域内地物目标像素点的提取必须遵循如下条件:
1)同一地物目标周围不能同时存在多种不同类型的边缘像素点,且每一个提取周期内,传感器元件只针对一种类型的像素对象进行取样。
2)如果边缘区域过大,传感器元件在一个提取周期内[10],无法实现对所涉及像素对象的完全取样,在选取地物目标时,应该适当缩小原图像中相邻像素点之间的比例关系,从而使得遥感影像呈现更密集的表现状态。
3)除特殊情况外,传感器元件在提取无人机可见光遥感影像地物目标时,只选择一个边缘区域作为像素点取样范围。
在上述条件下,u<0表示像素信息之间相互覆盖,u≥0表示像素信息之间相互独立,边缘特征明显。为此,在进行纹理特征求解时,β的取值只能属于[0,+∞)的数值区间,完成无人机可见光遥感影像纹理特征获取。
2 基于影像特征的无人机可见光遥感影像地物目标提取
在同一遥感影像区域内,获取了无人机可见光遥感影像光谱特征、纹理特征与边缘特征3种特征后,由于这些特征的分布形式受到可见光照射强度的直接影响[11],导致在提取地物目标过程中,易出现分布不均的情况。为此,需要对无人机可见光遥感影像数据集实行增广处理,保证地物目标特征分布均匀,得到较为清晰的地物目标。按照影像编码标签定义条件,计算地物目标的增强权重,从而在参量化处理光谱参量的同时,确定光谱吸收指数的取值范围,实现对影像地物目标的提取。
2.1 无人机可见光遥感影像数据集增广
在无人机可见光遥感影像中,一个地物目标通过线性变换达到另一个目标的平移行为称为数据集增广,在遥感像素点保持均匀分布的情况下,数据集增广包括尺度旋转、平移、旋转、变换等多种操作行为。原始遥感影像数据集中,地物目标像素点的分布越密集,表示无人机可见光的照射强度越大,在此区域内完成数据集增广,应保证所提取地物目标的唯一性。
(4)
E1,E2,…,En∈
(5)
设i1,i2,…,in分别表示与地物目标像素节点匹配的遥感影像数据增广向量,其取值属于(-∞,0)∪(0,+∞)的数值区间,φ表示数据集内的地物目标像素节点关联参数[12],的增广表达式如公式(6)所示:
(6)
跨遥感区域情况下,无人机可见光遥感影像特征不有意义,且不同遥感区域内的地物目标像素特征并无明显相关性,只能在单一遥感区域内完成对地物目标提取,由此完成无人机可见光遥感影像数据集增广。
2.2 无人机可见光遥感影像编码标签定义
完成增广后的无人机可见光遥感影像数据集内一个像素节点可以同时与多个影像编码标签保持对应关系,但一个标签只能对应一个地物目标,且影像编码标签对于地物目标的提取速率始终大于遥感影像数据集内的像素节点识别速率,因此定义影像编码标签,实现标签与目标的一一对应。影像编码标签是针对遥感影像数据集增广处理条件的地物目标提取原则。一幅完整的无人机可见光遥感影像中,地物目标节点分布行为不受遥感区域划分条件的影响,每一遥感区域内,地物目标节点的数量不固定[13]。观察像素节点的分布和特征,定义影像编码标签。由于每一个影像编码标签必须同时识别所有类型的遥感影像数据,因此在定义编码标签时,必须在完成影像数据集增广后,进行无差别取样[14]。无人机可见光遥感影像编码标签定义原则如图3所示。
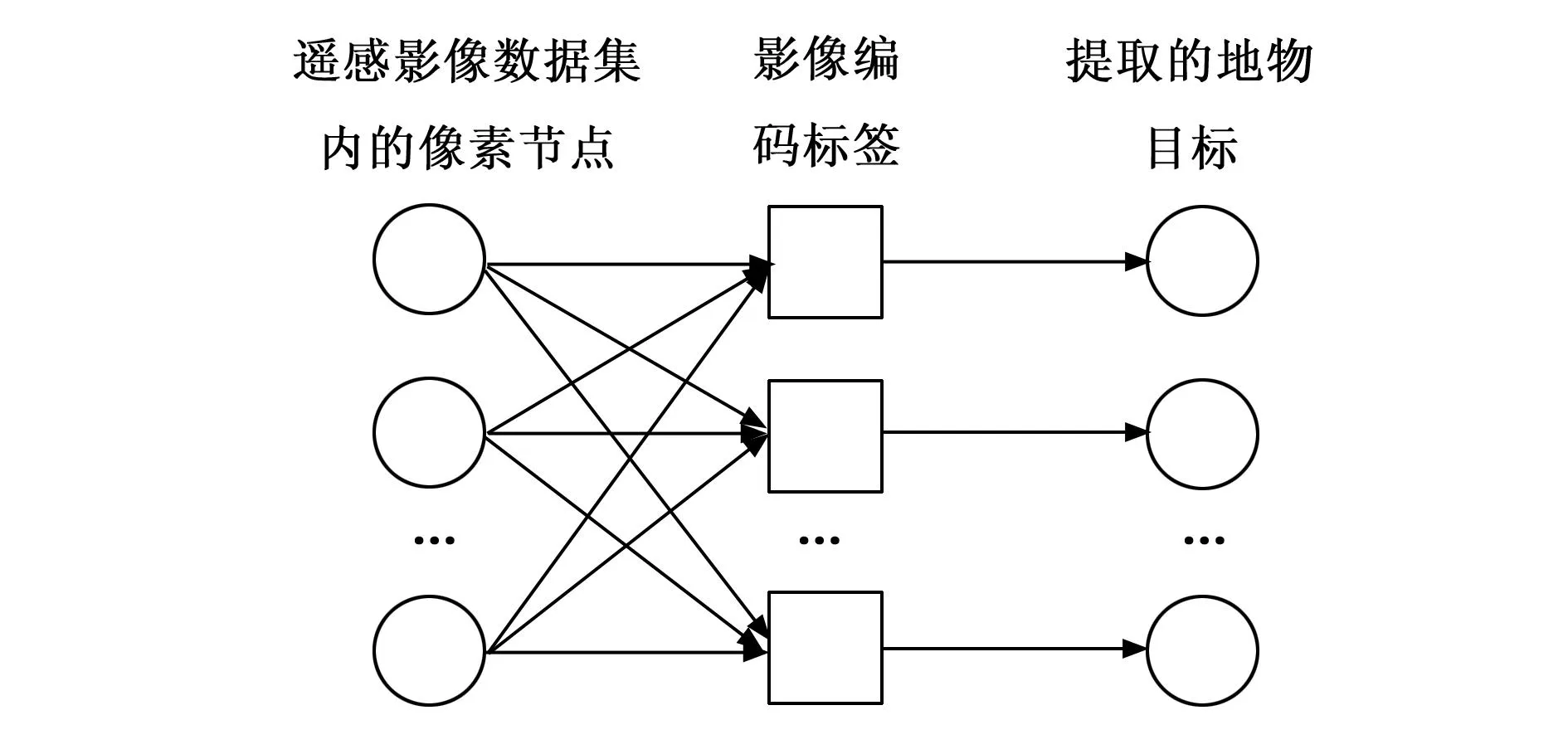
图3 无人机可见光遥感影像编码标签定义原则
(7)
影像编码标签影响传感器元件对地物目标的处理能力,因此保证单位遥感区域内所包含地物目标数量必须满足传感器元件的实际取样需求,实现无人机可见光遥感影像编码标签定义。
2.3 无人机可见光遥感影像地物目标增强权重确定
每一类影像编码标签对应的地物目标提取需求不同,为此,针对具体影像标签确定地物目标增强权重取值范围。增强权重是指地物目标像素在无人机可见光遥感影像中的放大能力,一般来说,取值越大表示单位遥感区域的覆盖面积越大。像素分布密集区域内地物目标边界绝对清晰是指该区域内地物目标增强权重的计算值大于“1”[15-16],在已知编码标签定义的前提下,多次训练耦合值向量,消除像素损失行为,确保像素节点与地物目标提取结果为一一对应。
设无人机可见光遥感影像地物目标的耦合值向量为d,像素信息训练效率为η,联立公式(7),将耦合值向量训练过程表达式定义为:
(8)

每一个无人机可见光遥感影像区域都是一个完整的像素区间,且每一区域内都不存在大范围堆积的空白像素点,所以在计算地物目标增强权重指标时,要求影像编码标签只能对应同一类目标像素信息。为此,利用式(8)获取无人机可见光遥感影像地物目标增强权重如式(9)所示:
(9)

2.4 无人机可见光遥感影像地物目标光谱参量化
增强权重能够提高地物目标的提取效果,为了提高增强权重对于地物目标提取的适应性,对无人机可见光遥感影像地物目标光谱进行参量化处理。无人机可见光遥感影像光谱参量化利用了光谱分辨率分析原则,光谱分辨率分析是指传感器元件在单位时间内可以采集到大量的连续影像数据,且在可见光照射下表现为同步状态,每一个像素对象的辐射照度与空间光谱成分完全相同[17-18]。在单位遥感区域内,可见光光谱为每个像素节点提供数十个甚至数百个光谱参量,且这些参量首尾顺次连接可以形成一条完整的光谱曲线,地物目标光谱的参量化处理是在光谱曲线内完成地物目标标定与按需处理。
设基于地物目标增强权重选取的无人机可见光辐射照度为μ,且其取值恒属于[1,+∞)的数值区间,地物目标光谱参量为jμ,地物目标光谱参量的初始值为j0,与光谱参量jμ相关的遥感影像连续性表现参数为kμ,与光谱参量j0相关的遥感影像连续性表现参数为k0,光谱参量化度量系数为λ,联立公式(9),地物目标光谱参量化处理表达式为:
(10)
同一遥感区域内,地物目标所在节点与核心遥感目标节点的间隔距离越远,J值越大。如果两个地物目标节点的像素等级相同且间隔距离极近,那么J值相对较小。
2.5 无人机可见光遥感影像地物目标光谱吸收指数计算
光谱参量化处理将无人机可见光遥感影像原始光谱数据转化为具有实际物理意义的光谱参数。光谱吸收指数是指地物目标在光谱带内的像素反射强度与无人机可见光反射强度之间的比值,用于描述地物目标对不同波段的光谱吸收情况。其取值满足光谱解混条件,即不同地物目标光谱曲线的波峰波谷形状、宽度、深度、位置和对称度等属性均存在差异[19-21]。由于无人机可见光遥感光线具有不可逆的特性,每个像素信息只代表一次照射的可见光反射强度,因此,需要控制光谱吸收指数完成地物目标的提取。
光谱吸收指数的表达式如公式(11)所示:
(11)
其中:zmax表示无人机可见光遥感光照度的最大取值,zmin表示可见光遥感光照度的最小取值,ρ表示地物目标像素在同一直线上的分布密度,ν表示参考光谱参量化处理条件的目标像素光谱反射参量。由于地物目标位置会影响地物目标提取,因此必须在同一直线上计算光谱吸收指数。
2.6 地物目标提取
计算光谱吸收指数后,需要对其再次模拟,获得最优解,实现无人机可见光遥感影像地物目标提取。光谱吸收指数模拟是根据数值模拟条件[22-23],判断最优解参数的取值范围,从而在获得地物目标提取结果的同时,完成像素信息筛选。地物目标提取需要保障目标节点边界的完整性与清晰性,为此,必须保证地物目标的关联性排列状态。
无人机可见光遥感影像地物目标的提取如式(12)所示:
(12)

3 实例分析
为验证所提方法的应用性能,将其与文献[2]方法(基于多通道数据融合的地物目标提取方法)和文献[3]方法(基于加权策略的高分辨率遥感图像目标提取方法)进行对比。
3.1 实验准备
实验区域位于M省的中心地带,北边为山区地带、西边为纵横的沙土道路,地上建筑不超过3层、地下建筑不超过2层,用地面积约为63 580 m2,总建筑面积约为70 170 m2,正负零相对于地平面的绝对高程为5.1 m。利用大疆经纬M30T航拍无人机搭载Ultris 20 series 高光谱光场成像仪对该区域进行航拍摄影,由于地上建筑、地下建筑、纵横道路在遥感图像中的像素水平相差较大,因此遥感影像中地物景观的色度差也较大,在开始实验之前,通过Pixelmash软件,对所得遥感影像进行像素平均处理,如图4所示。
通常情况下,地上建筑、地下建筑在遥感影像中的像素水平高,与之相关的地物景观颜色相对较深,纵横道路的像素水平低,遥感影像中色度指标取值相对较小。像素平均处理是通过划分关联区域的方式,将过深或过浅的像素节点融合在一起,从而使得整幅无人机可见光遥感影像更加均匀。
3.2 实验流程
地物目标边界的清晰度能够反映出传感器元件对无人机可见光遥感影像地物目标的提取能力,为此需要保障目标边界的清晰度以实现地物目标提取。本次实验根据外部区域与地物目标之间的像素差值判断传感器元件提取到的地物目标的边界是否为清晰化状态。在遥感图像区域等大的情况下,待识别的地物目标越少,传感器元件提取的地物目标边界越清晰。
本次实验的具体流程为:
1)完成对无人机可见光遥感影像像素的平均处理,确保影像中不存在像素差的情况下开始实验。
2)应用所提方法完成对影像中地物目标提取,分别记录外部区域与地物目标的具体像素值,所得结果为实验组参数。
3)应用文献[2]方法提取影像地物目标,分别记录外部区域与地物目标的具体像素值,所得结果为A对照组参数。
4)应用文献[3]方法提取影像地物目标,分别记录外部区域与地物目标的具体像素值,所得结果为B对照组参数。
5)根据实验组、A对照组、B对照组的像素差,分析所提方法在保障地物目标边界清晰度方面的应用能力。
3.3 数据处理
不同方法的外部区域与地物目标像素差如图5所示。
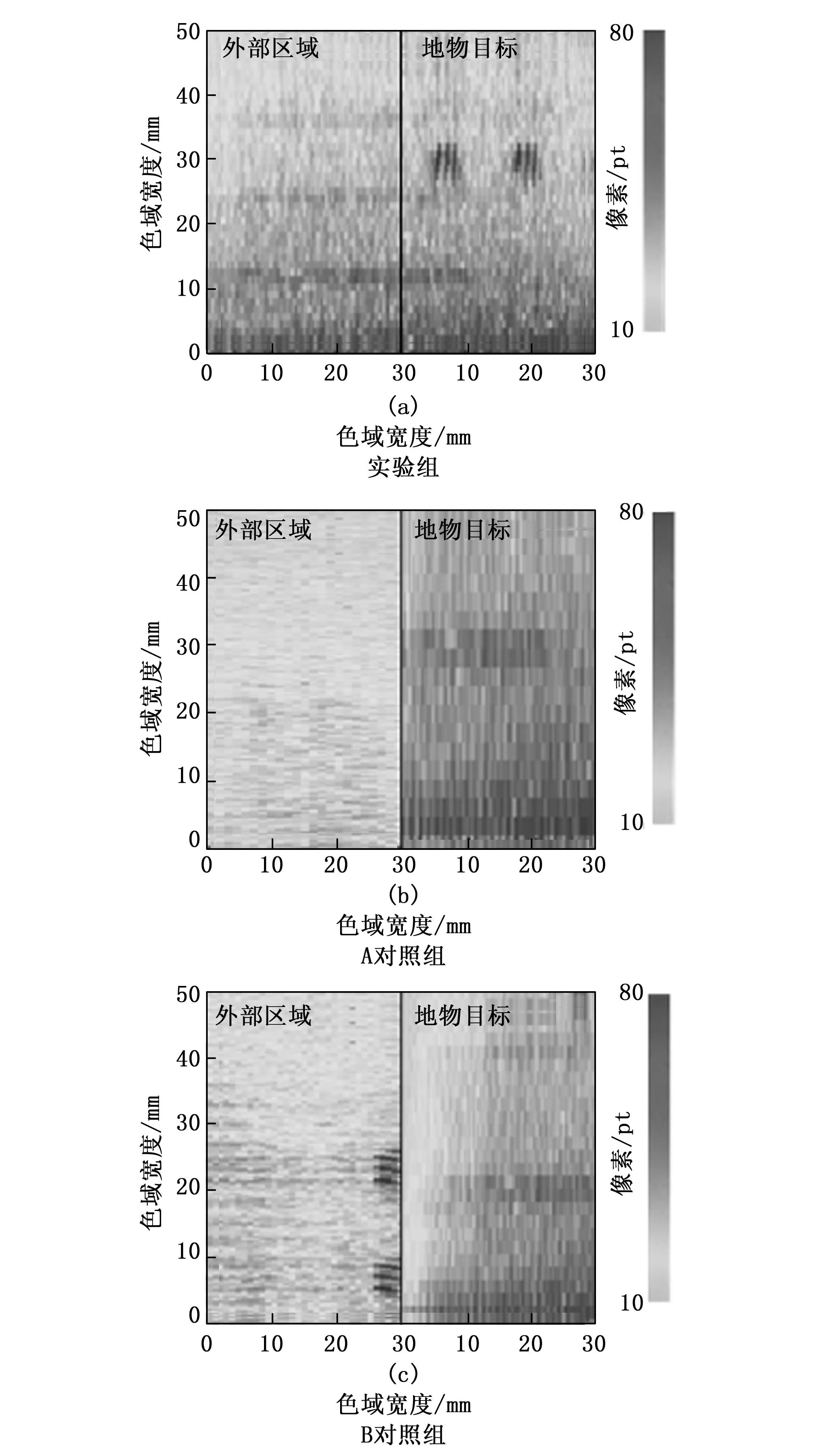
图5 不同方法的外部区域与地物目标像素差
分析图5可知,A对照组地物目标的像素水平较高,而外部区域的像素水平较低,二者之间的像素差较大。B对照组外部区域与地物目标之间的像素差变化规律与A对照组类似,二类像素之间的差值水平也相对较大。而实验组外部区域与地物目标之间的像素差水平较低,越接近边缘区域处的像素均值越高,越远离边缘区域处的像素均值越低,且外部区域、地物目标的遥感像素数值水平并无明显差异性,说明所提方法能够提高无人机可见光遥感影像地物目标地物目标边界的清晰度,地物目标提取能力较强。
3.4 实验结论
综上可知本次实验结论为:
1)应用文献[2]方法和文献[3]方法时,无法将外部区域与地物目标之间的像素差控制在较低的数值状态。
2)应用所提方法能够提高解决遥感影像地物目标边界清晰度,而地物目标边界的清晰度能够反映无人机可见光遥感影像地物目标提取能力,说明所提方法的地物目标提取能力较强。
4 结束语
本文提出了无人机可见光遥感影像地物目标提取方法。分析遥感影像特征,根据影像编码标签定义条件,确定光谱吸收指数的取值范围,实现对地物目标的准确提取。所提方法可以有效控制外部区域、地物目标像素差的数值水平,避免目标像素点集中分布,保证了地物目标边界的清晰度,具有较强的地物目标提取能力。
