复杂多径下IR-UWB自适应频偏估计算法研究
2024-02-29田润泽蔚保国鲍亚川李建佳杨梦焕
田润泽,蔚保国,鲍亚川,赵 军,李建佳,杨梦焕
(1.中国电子科技集团公司 第54研究所,石家庄 050081;2. 卫星导航系统与装备技术国家重点实验室,石家庄 050081)
0 引言
随着万物互联以及综合PNT体系的发展,高精度的室内定位技术越来越受到重视,对定位精度的要求也越来越高[1]。脉冲超宽带(IR-UWB,impulse radio-ultra wideband)技术利用纳秒级的极窄脉冲传输数据,具有时间分辨率高、抗多径能力强等特点,理论上能够实现厘米级的定位精度,是一种室内、地下管廊等复杂多径环境中实现高精度定位的有效手段。
IR-UWB系统通过测距和测角实现定位,测距是测定信号往返时间来估计标签与基站间的距离,即双向测距(TWR,two way range)。但标签与基站时钟相互独立,存在一定的时钟频率偏移(CFO,clock frequency offset),而CFO会造成到达时间估计(TOA,time of arrival)的误差,进而影响测距精度。此外,基于到达相位差(PDOA,phase difference of arrival)的测角方法主要依赖于相位测量精度,CFO会使得脉冲相位随时间产生偏移,导致相位测量出现严重误差,从而降低测角精度。因此,CFO是影响IR-UWB定位精度的重要因素,需要对其进行估计和校正。
在IR-UWB系统中,降低频偏影响大多采用时间戳测量的方法。IEEE 802.15.4a标准中提出了对称双边双向测距(SDS-TWR,symmetric double sided-twoway range)[2]方法,使用“频差对消”的原理,通过两个节点各自测量信号往返时间,有效降低了CFO带来的测距误差,文献[3]在SDS-TWR基础上做出改进,进一步减小了CFO带来的测距误差,提升了SDS-TWR的测距性能。文献[4-5]提出了N元对称双向测距(N-SDS-TWR,N-ary symmetric double sided- sided-twoway range),将SDS-TWR扩展到多个基站的组网中,进行了多基站与标签CFO的统一补偿,提高了系统整体的测距精度。“频差对消”原理可以减小频率偏移带来的测距误差,但无法改善频率偏移对相位测量的影响,频率偏移带来的相位误差必须要通过精确的频偏估计来消除。文献[6]提出了两次双向测距(D-TWR,double-two way range)方法进行频偏估计,连续两次测量信号到达时间差,将到达时间差与发送信号的时间间隔之比作为频偏估计值。文献[7]基于D-TWR引入了卡尔曼滤波算法,通过控制信号到达时刻的估计误差提高CFO估计精度,但连续多次测距使得频偏估计过程需要较长收敛时间。现有时间戳测量的方法其精度往往取决于信号到达时刻的估计精度。但在室内、地下管廊等环境中,信道环境复杂多变,信号到达时刻的估计精度在密集多径以及非视距影响下的估计精度严重降低,因此必须对频偏估计算法提出更高要求。
经典的频偏估计算法如L&R(Luise M&Reggiannini R)[8]算法、M&M(Mengali U &Morelli M)[9]算法等,是通过信号相关运算,计算前后时刻的相位差进行频偏估计。文献[10]改进了L&R算法,提出了一种两步频偏估计算法应用于具有连续载波的通信系统中。文献[11]联合FFT与时域自相关进行分步式频偏估计。另外,计算相关函数相位差进行频偏估计也经常应用于多载波UWB系统[12-15]。但是,以上针对具有连续载波系统的频偏估计算法并不适用于IR-UWB系统,其问题在于:IR-UWB为脉冲信号,复杂多径环境中相关运算的峰值会发生偏移,直接进行相位差计算会产生较大偏差;IR-UWB信号用来进行频偏估计的前导序列持续时间在几十微秒左右,较短的帧长无法满足高精度频偏估计要求[16]。
针对上述现状,本文对复杂多径环境高精度频偏估计方法进行研究,提出了一种基于贝叶斯估计的IR-UWB自适应频偏估计算法。利用IR-UWB的高时域分辨率,实时估计复杂多径信道的信道脉冲响应,与接收信号匹配滤波,实现相关峰值的精确提取,减小峰值时刻相位的计算误差;然后利用贝叶斯估计算法,在信号持续时间较短的情况下,提高频偏估计的精度。经过仿真与试验验证,本算法在IR-UWB系统中具有较强的实用性。
1 IR-UWB信号结构
IEEE 802.15.4a标准中,定义了高速率脉冲(HRP,high rate pulse)UWB的物理层信号。HRP UWB物理层帧结构由同步头(SHR,synchronization header)、物理层头(PHR,physicalheader)、物理层载荷组成,物理层载荷的数据来自数据链路层的层数据服务单元(PSDU,presentation servicedataunit)。HRP UWB物理层帧结构中的同步头SHR包括前导(SYNC)和帧起始界定符(SFD,start-of-frame delimiter)两部分,SYNC由多个相同的前导符号组成,每个前导符号包含一组前导码。前导码为三元码{-1,0,1},序列长度可选31或127。
频偏估计过程通常在数据已知的SYNC阶段进行,IR-UWB信号的SYNC结构如图1所示。HRP UWB发射信号的SYNC可表示为:
(1)
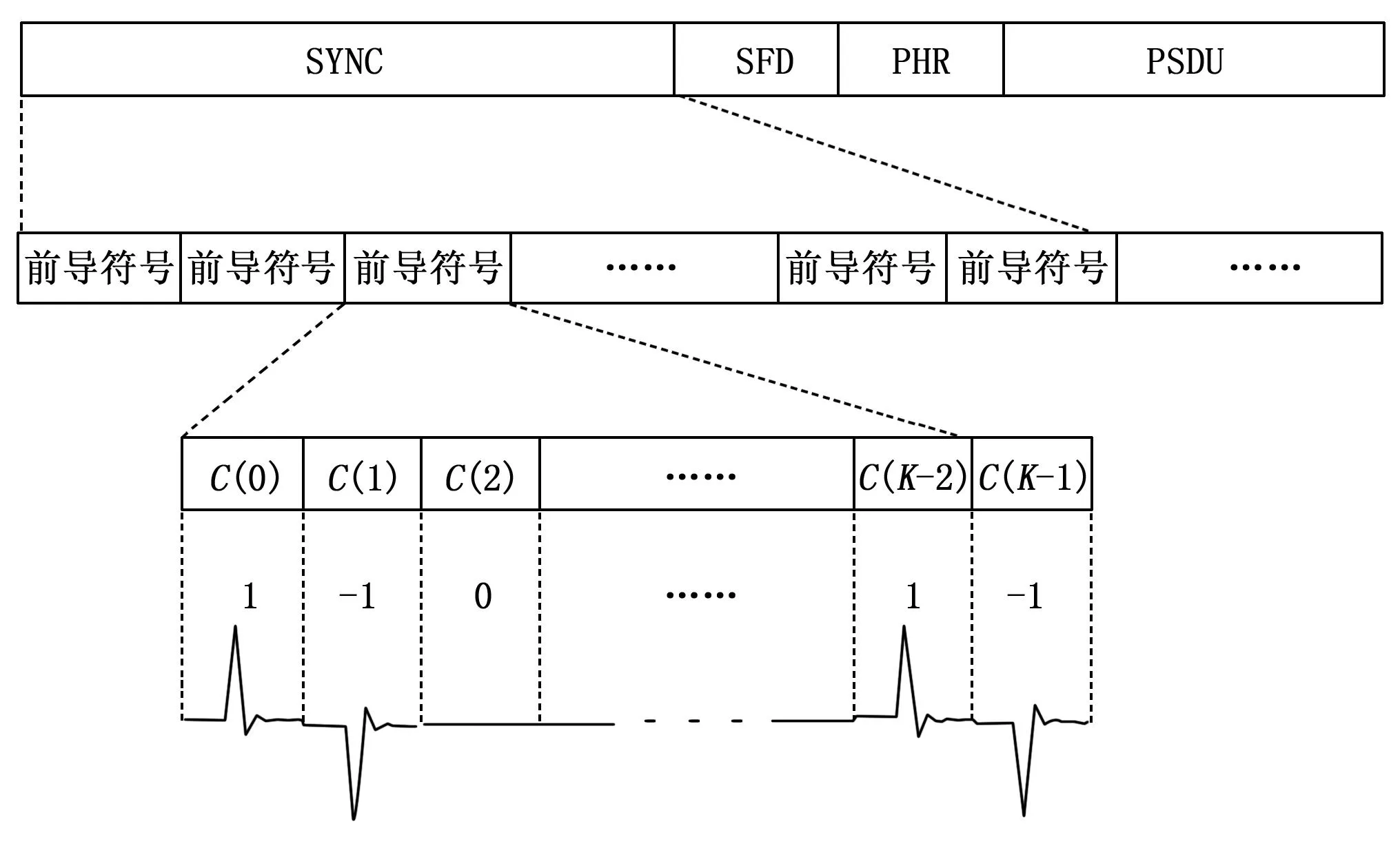
图1 HRPUWB信号SYNC结构
其中:i为前导符号序号,D为前导符号个数;k为码片序号,K为序列长度;Ts为符号周期;Tp为码片持续时间;极性码Bk={0,±1};f为载波频率;p(t)为脉冲波形函数,本文采用带宽500 MHz的4阶巴特沃斯波形。
2 IR-UWB接收模型
2.1 基于匹配滤波的相关接收
脉冲超宽带系统的接收方式按照工作原理进行分类,可分为基于能量检测的非相关接收和基于匹配滤波的相关接收。因为其前导序列具有良好的自相关性,而且相关接收的方式可以获得较高的相关积分增益,能够有效提升信号的测距和通信性能[17],所以对于HRP UWB信号来说基于匹配滤波的相关接收方式更为适用。
基于匹配滤波的相关接收过程如图2所示,首先,天线接收信号后经过低噪声放大器(LNA,low noise amplifier),放大后的信号通过混频器和本振信号混频,实现信号下变频,得到正交的I/Q两路基带信号;然后通过分立的两个低通滤波器滤除高频信号;经ADC采样后,与本地前导序列做相关运算来提高接收增益,最后得到相关后的复信号R(n)。

图2 基于匹配滤波的相关接收
但由于IR-UWB的发射系统和接收系统相互独立,其时钟频率存在一定的误差,所以在经过混频器与滤波器后,得到的基带信号相位会随时间发生偏移。此时带有频率偏移的SYNC基带信号可表示为:
r(t)=s(t-t0)·e-j2πΔft+φ+ξ(t)
(2)
其中:t0为信号到达时间;Δf为发射和接收系统之间的频率偏移;φ为初始相位;ξ(t)表示均值为零,功率谱密度为N0/2的加性高斯白噪声;
经过ADC采样后,离散的SYNC基带信号与本地序列模板进行相关运算,其过程可表示为:
Ri(n)+ξi(n)+j(Rq(n)+ξq(n))
(3)
其中:M为本地序列模板长度;Rq(n)为Q路接收信号,Ri(n)为I路接收信号;ξq(n),ξi(n)分别为I/Q两路的噪声;h(n)为本地序列模板,即HRP UWB信号的前导码脉冲序列,可表示为:
(4)
其中:p(n)为离散的脉冲波形函数。
在系统频率偏移的影响下,SYNC与本地前导序列进行相关运算过程中随时间会出现以Ts为周期相位不断偏移的相关峰,严重影响系统的数据解调准确率和测距测角精度。
2.2 复杂多径环境的接收特性分析
在室内、地下管廊等场景中,几何结构非常复杂,四周墙壁以及场景中的物体种类与材质多种多样,这些因素都会对无线电信号的传播过程造成不同程度的影响,导致接收端产生复杂多变的多径信号[18]。特别是在空间狭长的地下矿井和管廊中,相比开阔环境信号反射和衍射更加严重,多径信号更为密集,而且管道的金属材质反射出的多径信号具有更高的信号强度。此外,移动的人员和设备还会对信号的直射路径造成不同程度的遮挡,非视距接收频繁出现。
在此类复杂多径环境中,接收信号将会存在大量多径,式(2)可改写为:
e-j2πΔft+φ+ξ(t)
(5)
式中,wp(t)为单个脉冲经过多径信道后的信道响应:
(6)
其中:l为多径序号,L为多径条数;αl,τl分别为多径衰落系数和多径时延。
在复杂多径信道中进行相关运算处理,其结果会存在首达路径(FP,first path)为能量最强的路径或者FP非能量最强的路径两种情况,即视距信道接收和非视距信道接收。从图3和图4可以看出,IR-UWB信号的抗多径优势在于,信号的时域波形持续时间只有1~2 ns,在多径信道中可以清晰分辨相关后不同多径的能量峰值和时延。

图3 视距信道前导符号相关运算结果示意图
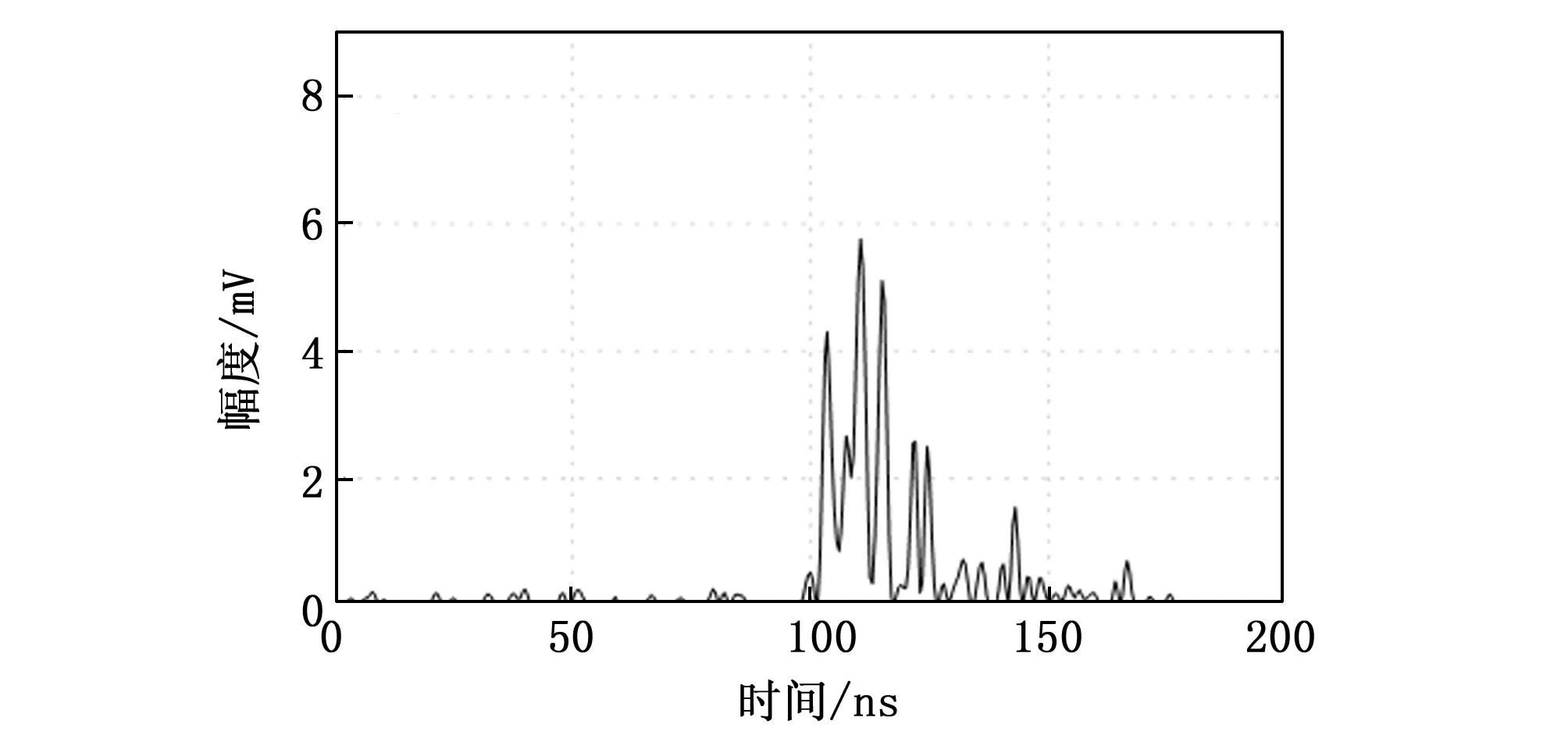
图4 非视距信道前导符号相关运算结果示意图
除此之外,携带标签的工作人员会不可避免地出现遮挡首达路径的动作,此时视距接收和非视距接收会不定时地交替出现[19]。在此种状态下,相关运算会伴随出现图4中的输出峰值偏离首达路径的情况,这会导致提取的峰值时刻出现偏差,无法保证频偏估计的精度。
3 基于贝叶斯估计的自适应频偏估计算法
3.1 频偏估计算法流程
本节所述的基于贝叶斯估计的自适应频偏估计算法分为相关峰提取与频偏估计两部分。如图5所示,第一部分进行相干峰的自适应提取,首先将累积得到的多径信道脉冲响应(CIR,channel impulse response)与处理过的接收信号进行匹配滤波,解决复杂多径环境中相关峰值提取发生偏移的问题;再对滤波后信号能量最大值进行索引。在第二部分完成基于贝叶斯算法的频偏估计,首先计算相位差并解模糊;再进行频偏序列的计算;最后结合先验信息与当前状态信息,采用贝叶斯估计算法,解决较短帧长条件下频偏估计精度低的问题。
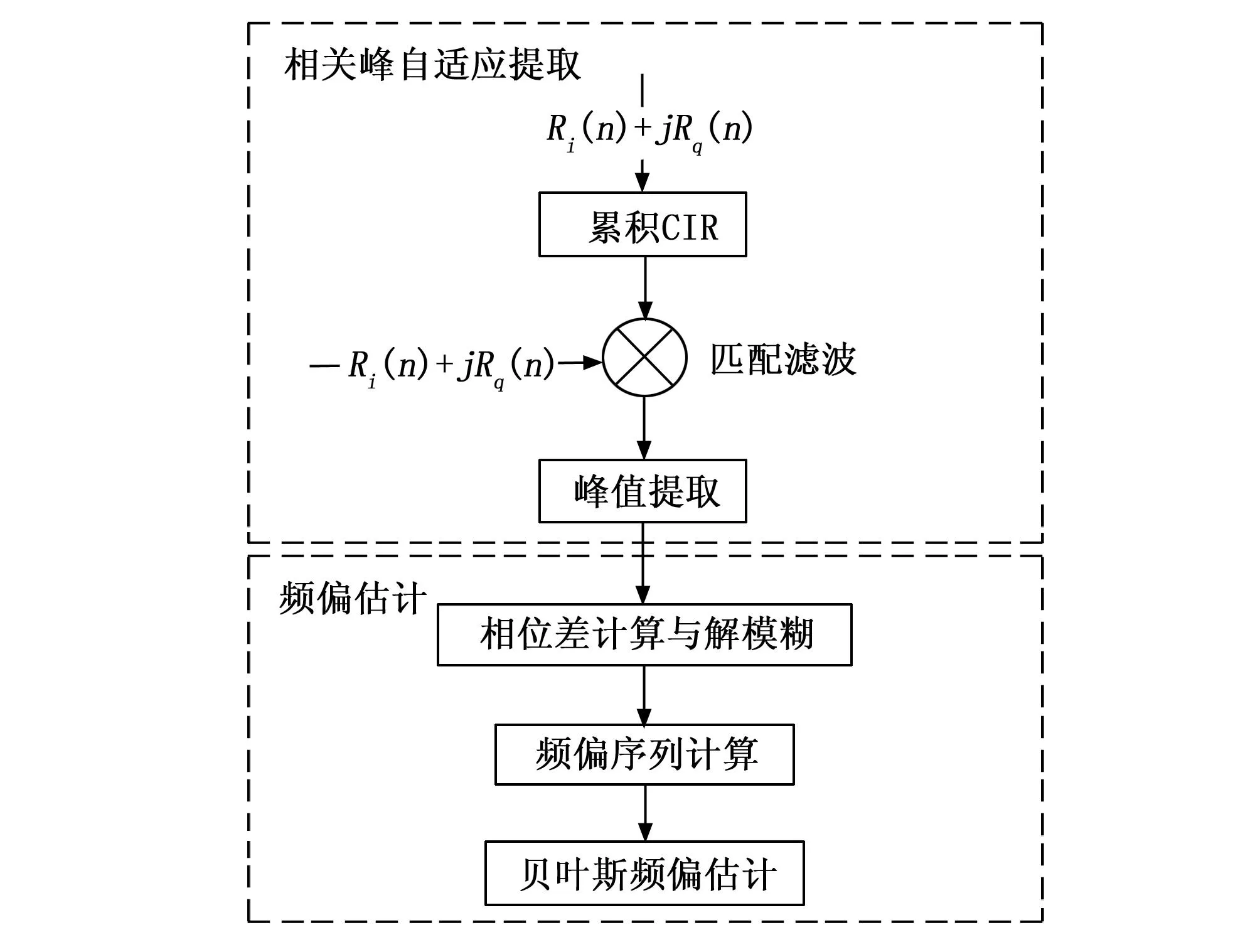
图5 自适应频偏估计算法流程
3.2 相关峰的自适应提取
相关峰提取阶段的任务是在每个符号周期内进行能量最大值索引,然后在能量最大时刻提取I/Q两路的相关值[20]。为保证在复杂多径下相关峰的精确提取,在最大值索引前加入自适应匹配滤波器,使用实时估计的CIR作为匹配滤波模板,与接收信号进行匹配滤波。这种方式能够自适应视距和非视距交替出现的复杂多径环境,将能量集中到首达路径上,实现相关峰的自适应提取。
相关峰自适应提取方法具体流程如下:
1)将I/Q两路的SYNC阶段的相关运算结果按照前导符号的周期进行累加,I/Q两路累加之后的能量值相加并开方得到累加后的CIR;
2)将累加得到的CIR作为匹配滤波模板,与输出信号R(n)进行匹配滤波运算;
3)索引每个符号周期匹配滤波结果中能量最大时刻的I/Q数据。
在步骤1)中,利用了UWB信道在短时间内为静态信道的原理,采用多个前导符号进行累加,可以有效降低噪声带来的影响,提高信噪比,恢复出信道的多径信息[21]。具体原理如下:
以I路为例,将连续的D个经过接收处理的前导符号进行累加并求均值,在SYNC阶段每个前导符号都为相同值,因此上述过程可表示为:
(7)
(8)
经过步骤2)匹配滤波过程后,在每个符号周期内,都会出现一个带有相位偏移的相关峰,该峰值可表示为:
Ewe-j2πΔfdTs+θ+Z(d)
(9)
其中:d={1,2,…,D}表示每个前导符号周期的峰值时刻;Ew表示峰值时刻的能量;θ为初始相位;Z(d)为峰值时刻携带的噪声。
3.3 频偏估计算法
频偏估计算法分为频偏序列计算和贝叶斯估计两步:第一步,根据每个前导符号相关峰的相位计算得到对应符号周期的频偏值;第二步,利用贝叶斯估计算法对频偏值进行优化,在最大后验概率的情况下进行迭代,得到更精确的频偏估计值。
第一步中频偏值的计算过程如下:将提取到的相关峰序列进行归一化处理,得到归一化的峰值序列corr(d);
根据下式计算得到每个前导符号与第一个前导符号的相位差:
ΔfdTs+ξΦ(d)
(10)

将相位差序列进行模糊度解算后,根据相位差序列,每个符号周期进行一次频偏值计算,可表示为:
(11)
其中:ξf(d)=ξΦ(d)/dTs表示频偏序列的噪声。
频偏序列的噪声方差可以根据相位噪声的均值和方差得出:
(12)
式(12)可以看出,频偏序列的噪声方差会随着时间的增加逐渐减小。因此可以结合之前时刻的频偏值和方差作为先验信息,当前符号周期计算出的频偏值作为状态信息,对频偏估计值进行实时优化。
第二步的优化过程采用图6所示的贝叶斯估计算法。贝叶斯估计算法结合了先验信息和当前时刻计算得到的频偏序列信息,在最大后验概率的情况下,几十微秒信号长度内完成高精度的频偏估计。
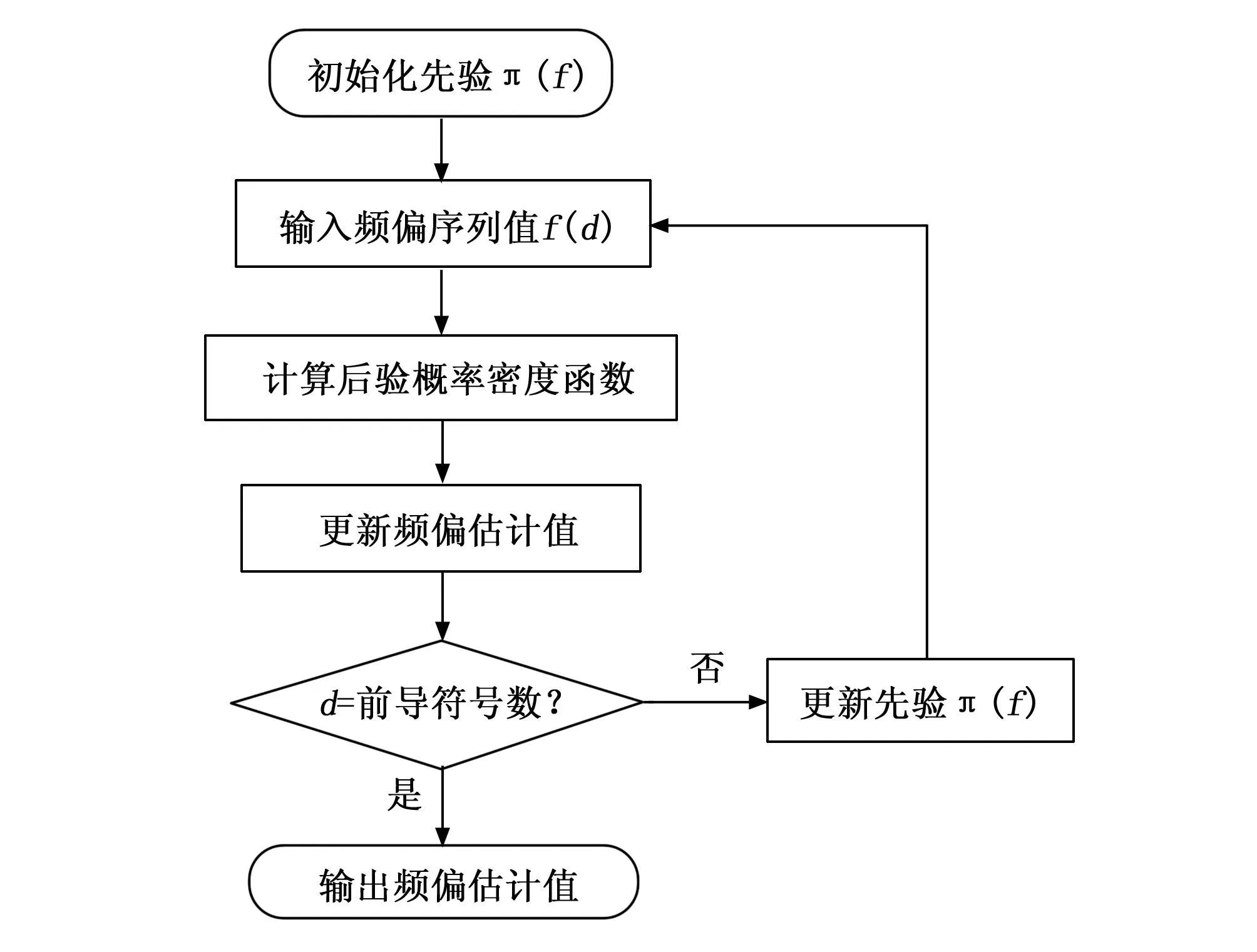
图6 贝叶斯频偏估计算法流程
贝叶斯频偏估计其原理如下:
(13)
首先初始化先验分布,将第一个符号周期的频偏值概率密度函数作为先验信息:
(14)
(15)
其均值和方差分别为:
(16)
然后,将π(f|f2)作为先验分布,计算下一个符号周期的后验分布。按照符号周期进行迭代计算,最后一个前导符号结束后得到最终后验分布:
(17)
最终后验分布的期望和方差分别为:
(18)
在最大后验概率下,将式(11)代入,计算得到最大后验频偏估计值:
(19)
4 仿真分析与实验验证
4.1 仿真分析
本节搭建了IR-UWB收发系统模型,考虑在中心频率为3 993.6 MHz的channel2信道下采用HRP UWB信号模式,在-10~20 dB信噪比范围内进行仿真。仿真参数如表1所示。

表1 仿真参数
算法性能采用均方根误差(RMSE,root mean squareerror)来衡量,表示为:
(20)
其中:Nm为蒙特卡罗仿真次数;fc为中心频率;RMSE单位为百万分率(ppm,parts per million)。
此外,仿真采用的HRP UWB信号帧长度约153 μs,如果均方根误差超过0.4 ppm,其校正后偏移频率的周期将小于HRP UWB帧长度的四分之一,此时将无法完成数据解调,可认为算法失效。
为验证本文提出的自适应贝叶斯算法的估计效果,将未进行相关峰自适应提取的贝叶斯估计算法和自适应贝叶斯算法进行仿真分析,同时与经典L&R算法进行对比。
在图3所示的视距信道下,不同算法的均方根误差曲线如图7所示。仿真结果显示,在视距信道下,本文自适应贝叶斯算法性能在低信噪比条件下优于L&R算法,在10 dB以上信噪比条件下,性能较为接近;对于未进行相关峰自适应提取的贝叶斯估计算法,信噪比在0 dB以上时,其性能较差,在信噪比低于0 dB时,其存在很大的均方根误差,此时该算法将无法满足系统要求。
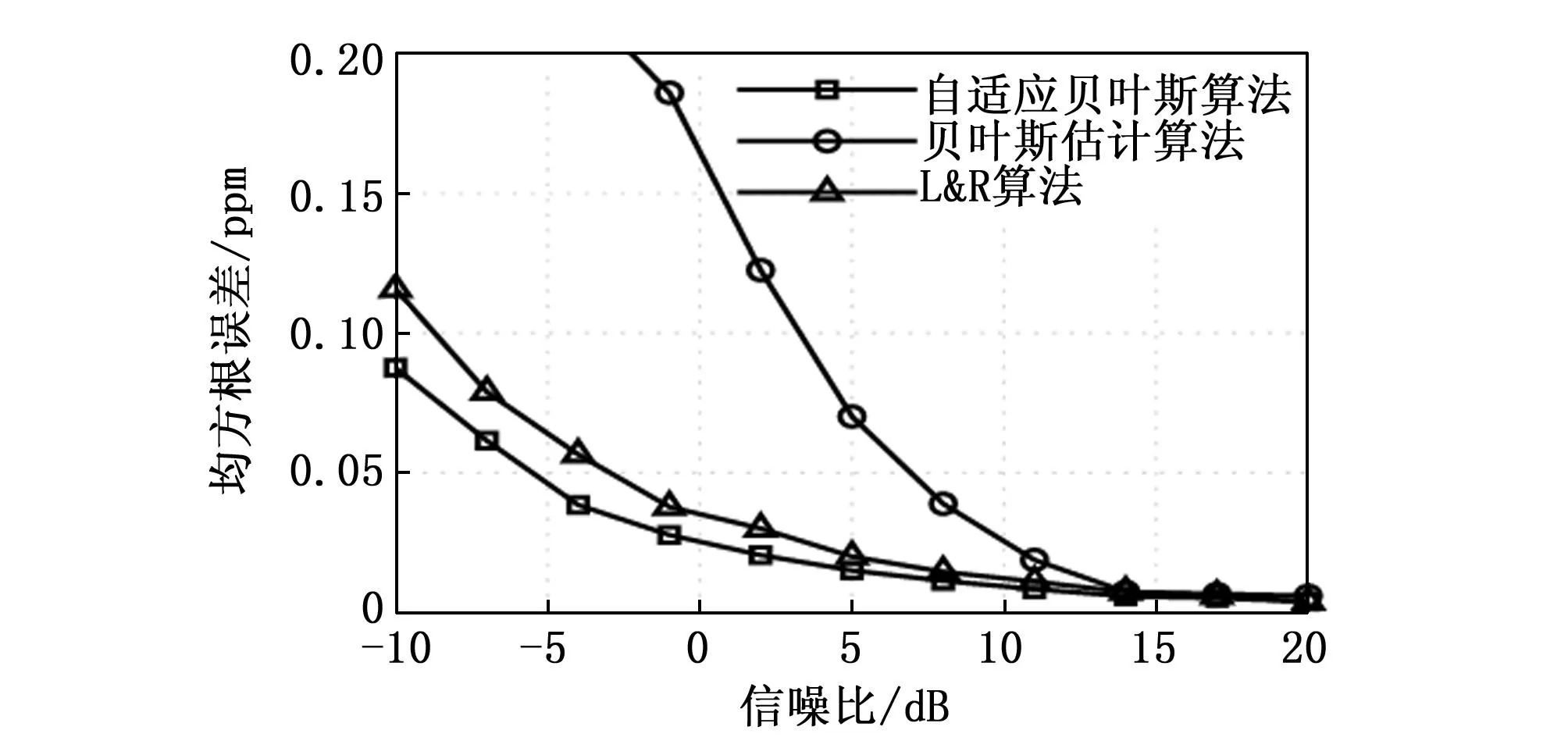
图7 CM1视距信道不同算法均方根误差
在图4所示的非视距信道下,不同算法的均方根误差曲线如图8所示。仿真结果显示,在非视距信道下,信噪比10 dB以上时,3种算法性能略低于视距信道下的性能;信噪比低于0 dB时,贝叶斯估计算法与L&R算法的均方根误差都大于0.4 ppm,无法满足系统要求。而本文自适应贝叶斯算法相比于视距条件在低信噪比条件下性能下降3 dB左右,仍能保证可靠的估计精度。
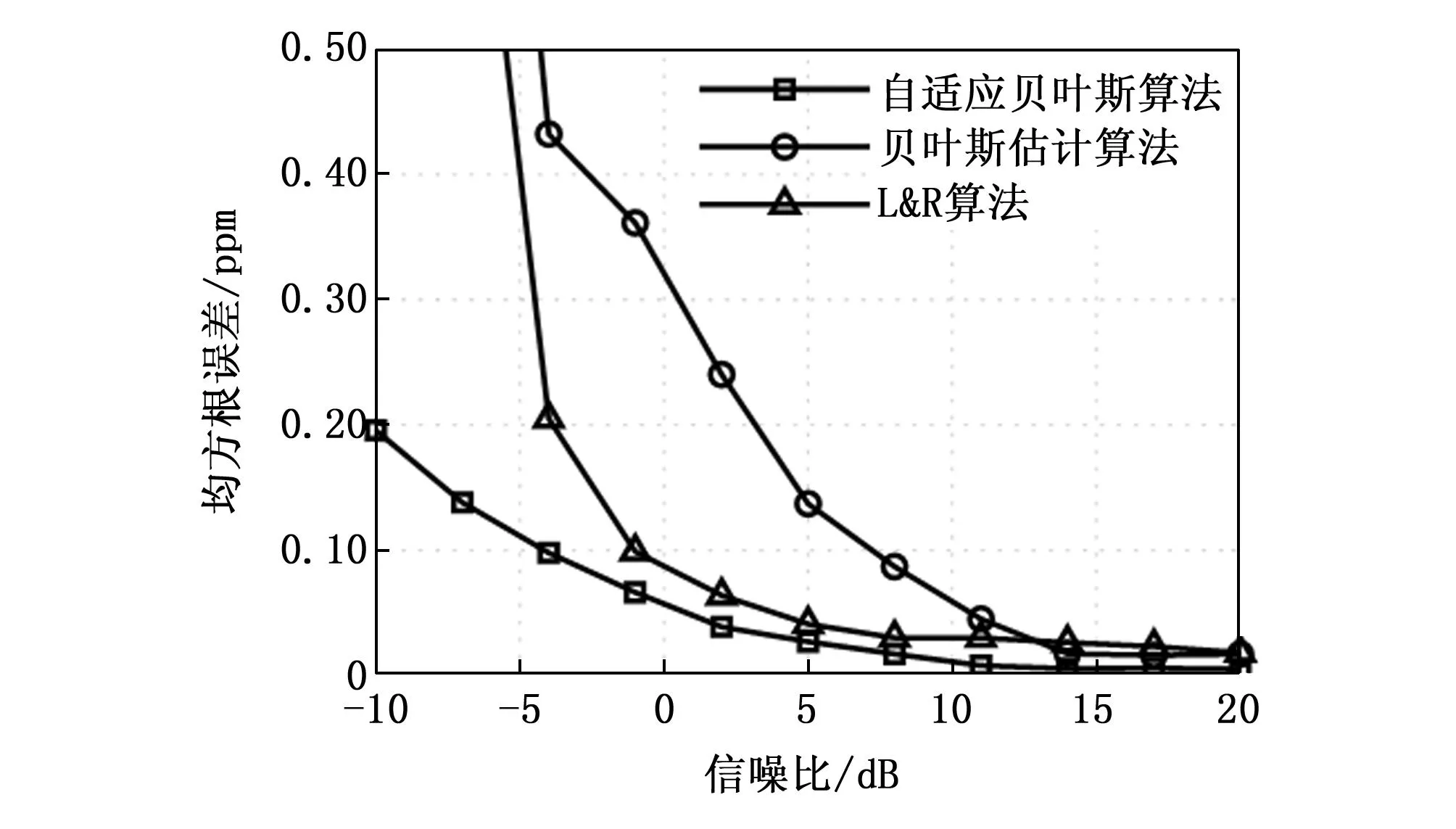
图8 CM2非视距信道不同算法均方根误差
比对自适应贝叶斯算法与未进行相关峰自适应提取的贝叶斯估计算法的均方根误差,验证了本文提出的相关峰自适应提取的有效性。加入CIR作为匹配滤波模板与接收信号进行匹配滤波不仅有效抑制了复杂多径的影响,提升了频偏估计的精度,还保证了频偏估计结果在非视距和低信噪比条件下的可靠性。
基站完成一次双向测距过程所需时间至少为两倍信号帧长度,本文采用HRP UWB测距帧长约153 μs,因此收发时钟频偏10 ppm时带来测距误差至少为91.79 cm。相位测量使用的SFD长度约为8.1 μs,在时钟频偏10 ppm时带来SFD初始相位与结束相位误差约为58.32°。经过不同算法进行频偏估计后,对测距误差和相位误差进行补偿。表2显示了在CM1视距信道下不同信噪比的测距误差与相位误差RMSE对比数据。采用本文算法频偏估计后的测距误差略低于L&R算法,在0.56 cm以内,相位误差在0.71°以内,不加入峰值自适应提取算法时误差大大增加,-5 dB信噪比下测距误差达到了7.13 cm,相位误差超过9°。
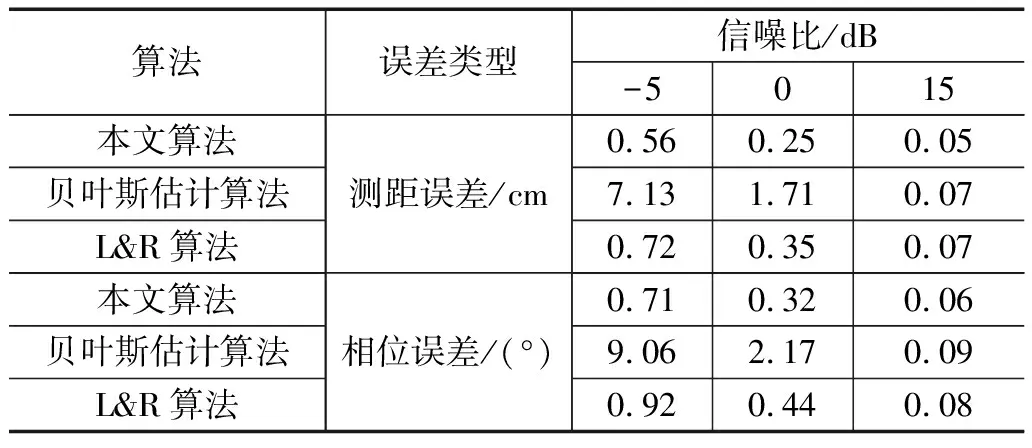
表2 CM1信道测距与测相位均方根误差对比
表3显示了在CM2非视距信道下不同信噪比的测距误差与相位误差RMSE对比数据。相比于CM1视距信道,采用本文算法频偏估计的补偿精度降低了约200%,但测距误差保持在1.27 以内,相位误差保持在1.61°以内;不加入峰值自适应提取算法情况下,非视距的补偿精度相比于视距环境降低了46%,而L&R算法的精度在低信噪比条件下明显恶化,信噪比在-5 dB时,相比于视距信道误差增加了10倍。
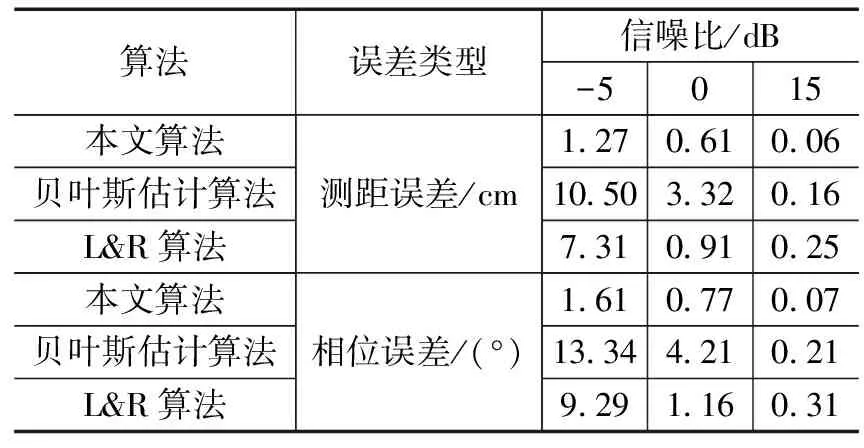
表3 CM2信道测距与测相位误差对比
仿真结果表明了本文所提出的基于贝叶斯估计的自适应频偏校正算法在视距和非视距信道中的有效性和准确性。
4.2 实验验证
为验证本文算法在复杂多径环境中的实际效果,搭建了基于FPGA的IR-WUB硬件实验系统,在瓦斯灾害应急信息技术国家重点实验室清水溪实验巷道环境中验证本文频偏估计算法的可行性。
IR-WUB硬件实验系统包含基站和标签两组UWB实验平台,系统参数如表1所示,与仿真系统保持一致。硬件实验平台与实验场景如图9所示。基站和标签采用增益为8 dB的UWB全向天线进行信号收发,天线在巷道中间放置,距离巷道两侧墙壁约0.8 m,高度统一保持在1.8 m,将基站放置于标记的起点处进行信号发射,标签在50 m范围内,先后放置在5、10、15、20、25、30、35、40、45、50 m不同距离进行信号接收处理,采用本文自适应贝叶斯估计算法进行实时的频偏估计,在相同距离下进行10次重复测量。
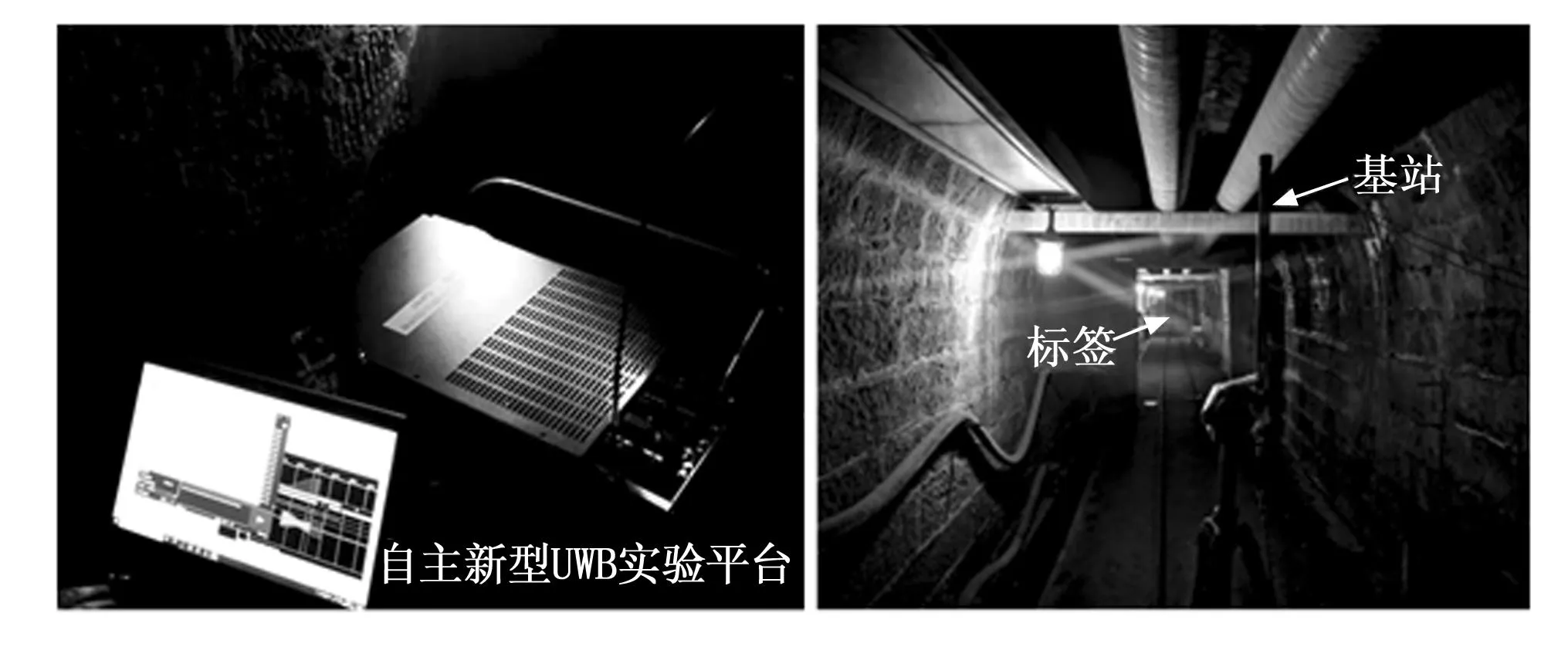
图9 实验平台与巷道实验环境
为保证实验结果准确性,本次实验数据均为一次开机的情况下产生。不同距离下频偏估计值与各自平均值如表4所示,测得最小频偏估计值为2.233 kHz,最大频偏估计值为3.003 kHz,全部数据的整体平均值为2.558 kHz。

表4 不同距离下频偏估计值
为了具体地描述系统的频偏估计误差,将不同距离的频偏估计值分别于各自均值和整体均值进行比较。频偏估计值相与各自的均值比较得到不同距离频偏标准差曲线,不同距离频偏标准差可表示为:
(21)

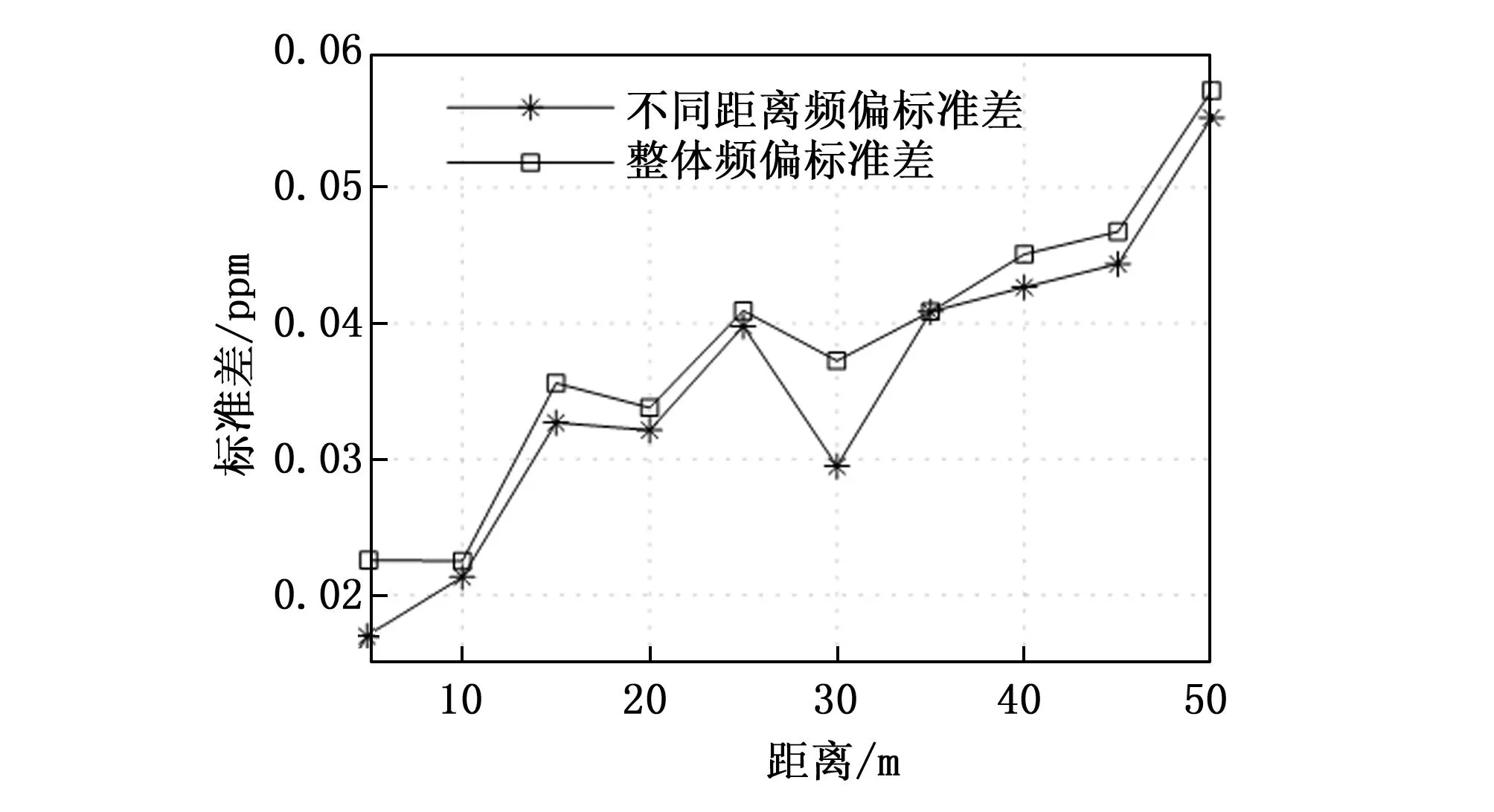
图10 本文算法在实际测量中的标准差
实验结果表明,随着标签与基站之间距离的增加,频偏估计的标准差也会随之增加,在50 m范围内,频偏测量标准差不超过0.06 ppm。因此算法满足脉冲超宽带系统要求,具有较强的实用性。
5 结束语
本文提出了一种基于贝叶斯估计的IR-UWB自适应频偏估计算法,用于复杂多径环境下的频偏估计。本算法在频偏估计前加入匹配滤波器,采用实时估计的脉冲信道响应作为匹配滤波模板,保证在复杂多径环境中相关峰的自适应提取,同时在信号帧长度几十微秒条件下利用贝叶斯估计算法提高的频偏估计精度。经过仿真分析,本文算法可满足低信噪比和非视距环境要求,与实时CIR匹配滤波有效提高了频偏估计精度,相比于L&R算法有更高的估计精度;在地下巷道搭建了IR-WUB硬件实验系统,实验结果表明,本文算法实现了在50 m范围内0.06 ppm的频偏估计精度,验证了本算法在狭窄巷道环境中的有效性,具有较强的实际应用价值。
