地下溶洞形态分析与可视化
2024-02-27罗智源叶锡钧徐伟真
罗智源,叶锡钧,徐伟真
(广州大学土木工程学院,广东 广州 510006)
0 引言
岩溶是指可溶性岩层受流水的物理化学作用而形成的地貌,这类特殊的地质现象多出现在碳酸类岩石地区,是一种典型的不良地质灾害,主要形态有溶洞、土洞以及暗河等。据统计,我国岩溶地区主要分布贵州、云南、广西以及广东等南方省份,其中广东省内碳酸盐地层分布面积约占全省面积的7%,约为2.9×104km2,主要集中在粤北地区[1]。伴随着我国基础建设的快速发展,开发利用城市地下空间表现出巨大的经济效益。目前,许多工程项目不可避免涉足岩溶区域,因此难免会遇到许多不良地质情况,如岩溶渗漏、岩溶塌陷等一系列潜在的工程地质问题。在未探明地下岩溶情况下进行工程建设,当灰岩溶蚀发育至一定程度时会导致桩底承载力不足以及地面塌陷等安全隐患,严重危害建筑物的质量,造成生命和财产的损失,同时为了避免在施工过程中盲目注浆,应在施工前采取有效措施提前探明溶洞的发育情况和分布规律,为后续的工程桩设计、施工提供服务[2-4]。
目前国内外诸多科研工作者对地下溶洞/土洞探测开展了大量研究工作,并取得一系列创新成果。常用的探测方法主要分为钻探法[5]和地球物理探测方法(简称物探法)[6-8]等,其中传统的钻探法盲目随机钻孔,通过以点带面的方法掌握区域的整体地质情况,该方法效率低下、耗费大量的人力、财力以及难以掌握溶洞的整体发育情况,同时盲目地钻孔取芯容易导致岩溶塌陷。物探法是一种无损的探测方法,只能对地下岩溶进行宏观判断,所以应采取其他勘察手段进一步对其空腔形态进行精确测量。本文以某项目施工阶段勘察为例,采用高密度电法进行地面初步探测,以期低成本、高效率地完成不良地质体的筛选,再通过钻孔式三维激光扫描仪对洞内情况进行快速扫描。
然而,溶洞一般结构非常复杂、无规则,加上内部环境恶劣,为了获得物体的完整三维模型,需要进行多次不同视角的扫描获得全局信息,点云配准的任务就是将不同视角获取到的点云数据进行对齐,使得它们在同一坐标系下表示同一个物体或场景,其中配准精度决定了后期三维建模的质量。近年来,深度学习在三维点云领域取得了重要的进展。深度学习模型能够学习到点云数据中的高级特征表示,从而更好地捕捉点云的几何和语义信息。这种模型对于点云中的噪点具有较强的鲁棒性,能够提高在复杂场景下的点云配准精度。通过配准后的结果,可导入通用的三维软件,通过后处理形成三维实体模型,能客观真实地反映空区三维形态和走向延伸,实现对复杂形态溶洞/土洞的精细化表征,进一步了解溶洞发育情况,为后续工程的建设制定相对应的施工方案提供更准确的数据依据[9-12]。
1 点云数据的获取方式
1.1 三维激光扫描技术原理及特点
三维激光扫描测量技术克服了传统测量技术的限制,通过非接触主动测量方式直接获取高精度的三维数据,实现了对物体的全面扫描,并且不受时间限制,无论白天还是黑夜都可以进行测量,具有非接触性、快速性、数字化和精度高等特性。三维激光测量技术的出现为溶洞的勘察设计提供了全新的技术手段,其核心原理是利用激光测距原理,靠发射和接收激光脉冲信号的时间差来计算被测目标到激光扫描仪的距离S、横向扫描角α和纵向扫描角θ,再通过对数据处理将被测物体的表面信息转换成大量的三维坐标信息(见图1)。
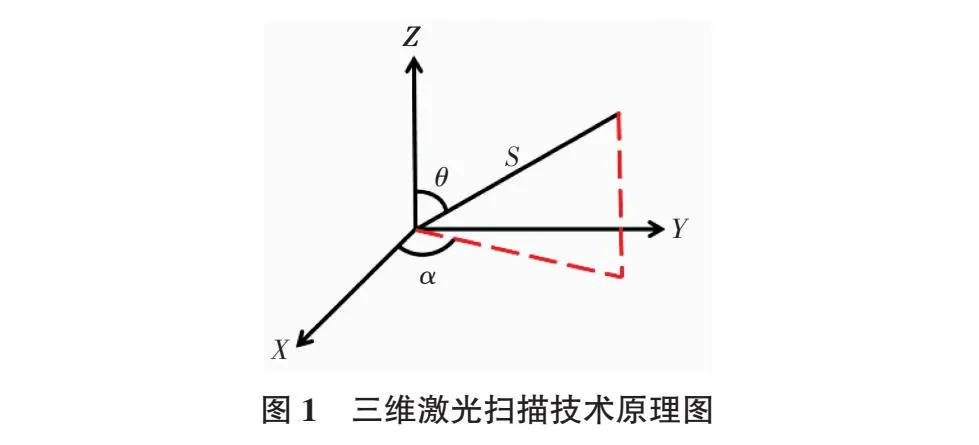
(1)
1.2 三维激光扫描仪参数信息及其探测技术
本次试验采用GLS-Ⅱ钻孔式三维激光扫描仪,该仪器主要参数如表1所示。
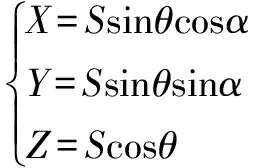
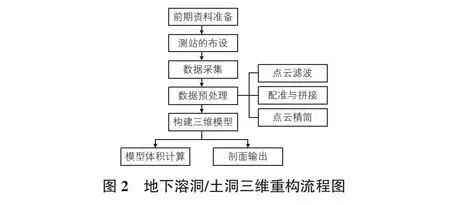
本次试验具体操作流程见图2,首先根据高密度电法仪反演结果圈出异常区域,初步勘察出溶洞的大概埋深和发育规模,选取溶洞顶部和底部之间高度最大的地方进行钻孔(孔径应90 mm以上),现场准备工作完成后,沿勘探钻孔下放测试探棒(直径约50 mm)进入溶洞内部,通过扫描探头自动进行360°扫描(见图3),获取大量溶洞/土洞边界的点云数据,根据得到的结果,可指导下一钻孔的布孔位置,及时优化布孔方案,最后将多站溶洞点云数据进行处理。
2 基于深度学习的点云配准方法
点云配准是指将多个点云数据集对齐到同一个坐标系中,使得它们在空间中对应的点能够重合或接近。基于深度学习的点云配准是一种利用深度学习技术来实现点云数据对齐和匹配的方法,通过大规模的数据集进行训练,能够更好地捕捉点云数据的细节和局部特征,从而提高对噪声、遮挡和不完整数据的鲁棒性。本文采用的是一种快速特征度量点云配准框架[13](见图4),与传统的点云配准方法不同,不需要搜索对应关系,而是通过最小化特征度量投影误差来进行配准,这种方法具有较高的精度和鲁棒性,特别是处理存在显著的噪声和密度差异的点云配准。
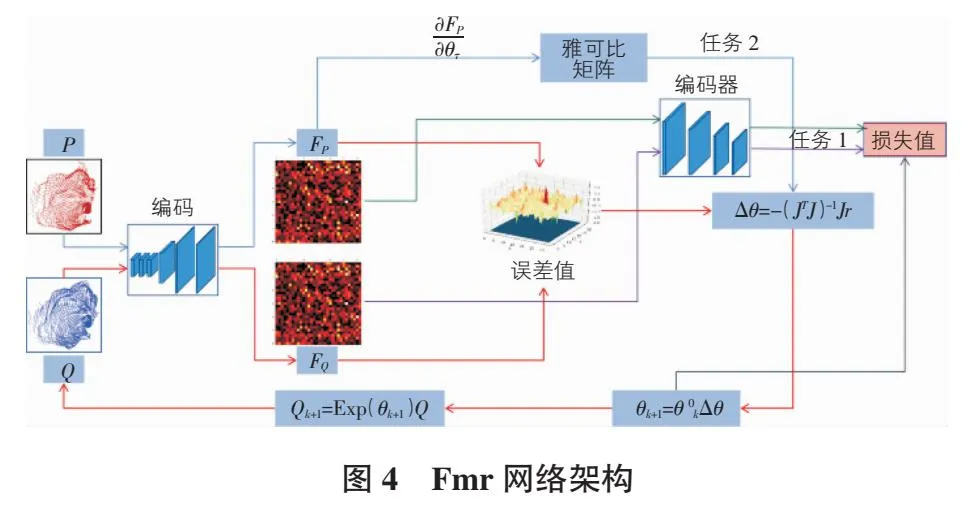
2.1 Fmr网络(Feature-metric registration)
该网络模型的总体结构由两个模块组成:编码器模块和多任务分支模块。编码器模块用于从输入点云中提取特征。多任务分支模块包括编码器-解码器神经网络和特征度量配准模块。编码器-解码器网络以无监督的方式进行训练,以确保当存在空间变换时,两个相同点云的特征不同,当移除变换时,特征相同。特征度量配准模块通过最小化特征差异来估计两个输入点云之间的变换矩阵。
对于给定两个点云P∈RM×3和Q∈RM×3,配准的目标是找到使点云P与Q最佳对齐的刚性变换参数(R,t),具体公式见式(2):
(2)
其中,r为投影误差;F为编码器模块学习的特征提取函数;P为源点云;Q为目标点云;R为旋转矩阵;t为平移向量。
为了求解上述方程,Huang X等提出了一种特征度量配准框架,可以以半监督或无监督的方式进行训练。首先,对两个输入点云提取两个旋转注意特征。其次,将特征输入到多任务模块中。在第一个分支(Task1)中,解码器被设计为以无监督的方式训练编码器模块。在第二分支(Task2)中,计算投影误差r以指示两个输入特征之间的差异,并且通过最小化特征差异来估计最佳变换。变换估计迭代运行,并且通过IC(Inverse Compositional)算法来估计每个步骤的变换增量(Δθ),见式(3):
Δθ=(JTJ)-1(JTr)
(3)

2.2 损失函数
2.2.1 Chamfer loss
编码器-解码器分支以无监督的方式进行训练,并结合Chamfer损失的训练方法可以提高点云配准的准确性和鲁棒性,使得编码器能够更好地学习到点云的特征表示。具体计算公式见式(4):

(4)
其中,pA为从单位正方形[0,1]2上采样的点集;x为点云特征;φθi为MLP参数的第i个部分;S*为原始的输入点云。
2.2.2 Geometric loss
几何损失函数的目的是通过最小化这个损失函数,可以使得估计的变换矩阵(gest)更接近真值的变换矩阵(ggt),从而实现点云的配准和对齐。具体计算公式见式(5):
(5)
其中,P为点云数据;M为点云总数。
当采用半监督的方式进行训练时,最终的损失函数见式(6):
loss=losscf+losspe
(6)
2.3 实验结果
根据实验结果显示,该方法在不同初始角度下展现了出色的整体性能。在7Scene数据集上,该方法相较于经典优化方法、特征学习方法和深度学习配准方法表现更为优越。此外,无监督方法始终比半监督方法取得更好的结果。
3 工程概况
3.1 工程地质概况
本次试验以某项目施工阶段进行勘察,根据区域地质图及周边项目资料,本场区内岩土体主要为:第四系人工填土层、冲洪积层(细砂、中砂、粗砂、砾砂、粉质黏土)、残坡积层(粉质黏土、角砾)、石炭系灰岩(中风化、微风化)、石炭系砂岩(全风化、强风化、中风化、微风化)等。项目场地地势平坦,周边项目及踏勘期间未发现岩石滑坡、泥石流、采空区、地面沉降等地质灾害及不良地质作用,且该区域人类工程活动强度较弱,地表附加荷载不大,因此场地处于相对稳定状态。本场地不良地质作用主要为岩溶。
3.2 水文特征
场地地下水主要赋存在第四系砂层、基岩风化裂隙中,地下水主要靠大气降水和地表水径流补给(如珠江等)。经现场观测和调查,场地地下水位与河涌有密切的水力联系,地下水位与河涌潮汛一致,即每年6月—9月为高水位期,10月份以后水位缓慢下降,1月份水位最低。由于施工期较短,观测的地下水位不能代表长期地下水水位。常年变化幅度在1.0 m~3.0 m之间。
4 勘察结果及分析
4.1 三维激光扫描仪扫描结果
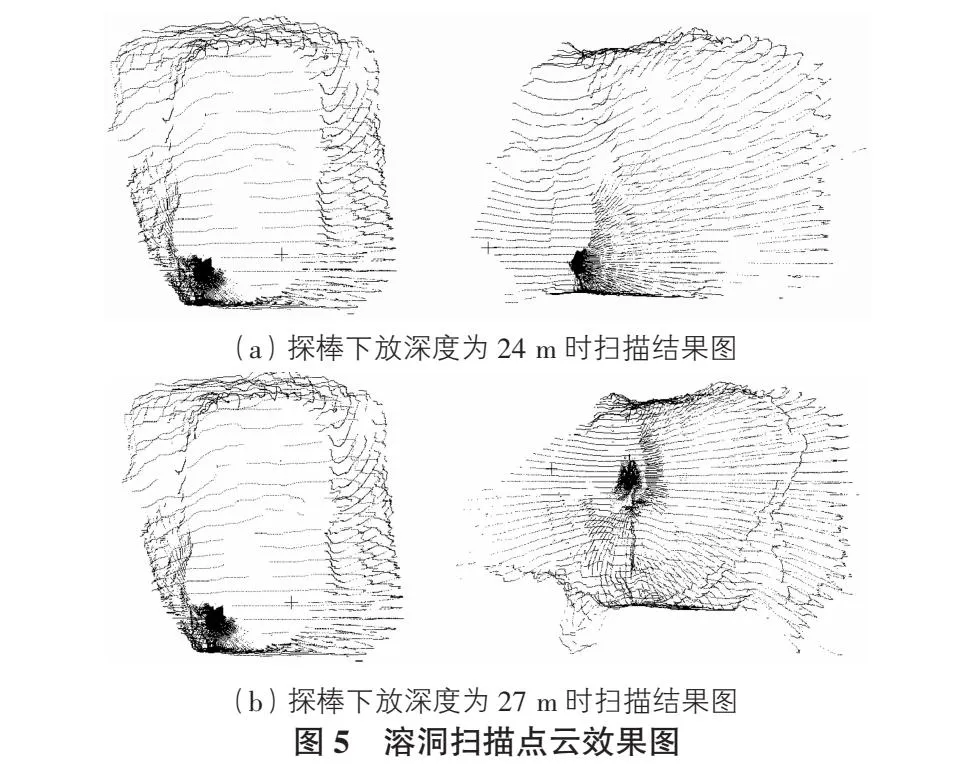
在本次测量中,由于该地区地下水位较高,三维激光扫描在遇到水时,水对激光的反射和吸收能力较强,会导致激光束的能量损失和信号干扰,从而影响扫描仪的测量精度和可靠性。因此本次试验需要结合高密度电法反演结果,选取无填充的溶洞进行快测量,为了溶洞的完整数据信息,将探棒下放到不同深度进行扫描,具体扫描结果见图5。
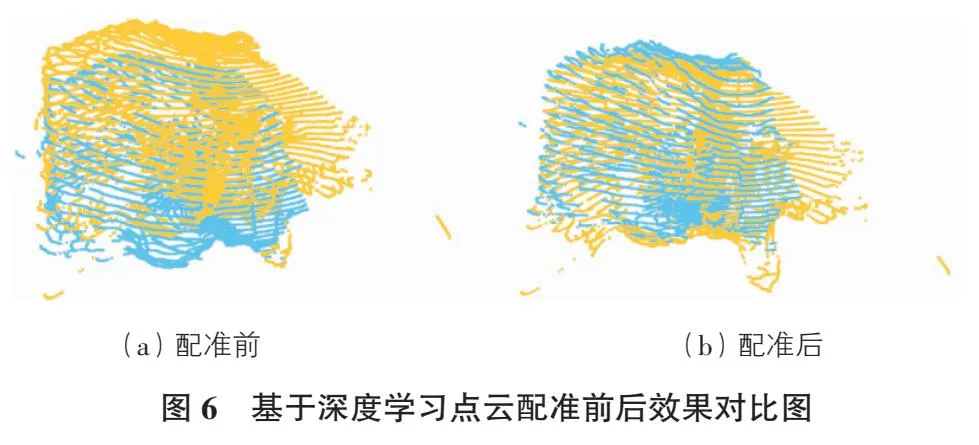
4.2 基于深度学习点云配准结果
通过基于深度学习点云配准算法,将扫描结果进行配准,具体结果见图6。
4.3 三维激光扫描成果分析
通过Geomagic studio2015软件对配准后的溶洞点云数据进行后处理(去噪、抽稀以及封装),重构出溶洞三维模型,可直观了解其整体形态,见图7。
结果表明该溶洞位于地面以下22.1 m~31.2 m,其内部体积大小约为279.6 m3,高度为9.1 m,关键位置平剖面沿Z轴由上往下,其中剖面一位于埋深24 m,剖面间隔为2 m,以此类推,剖面效果图见图8。
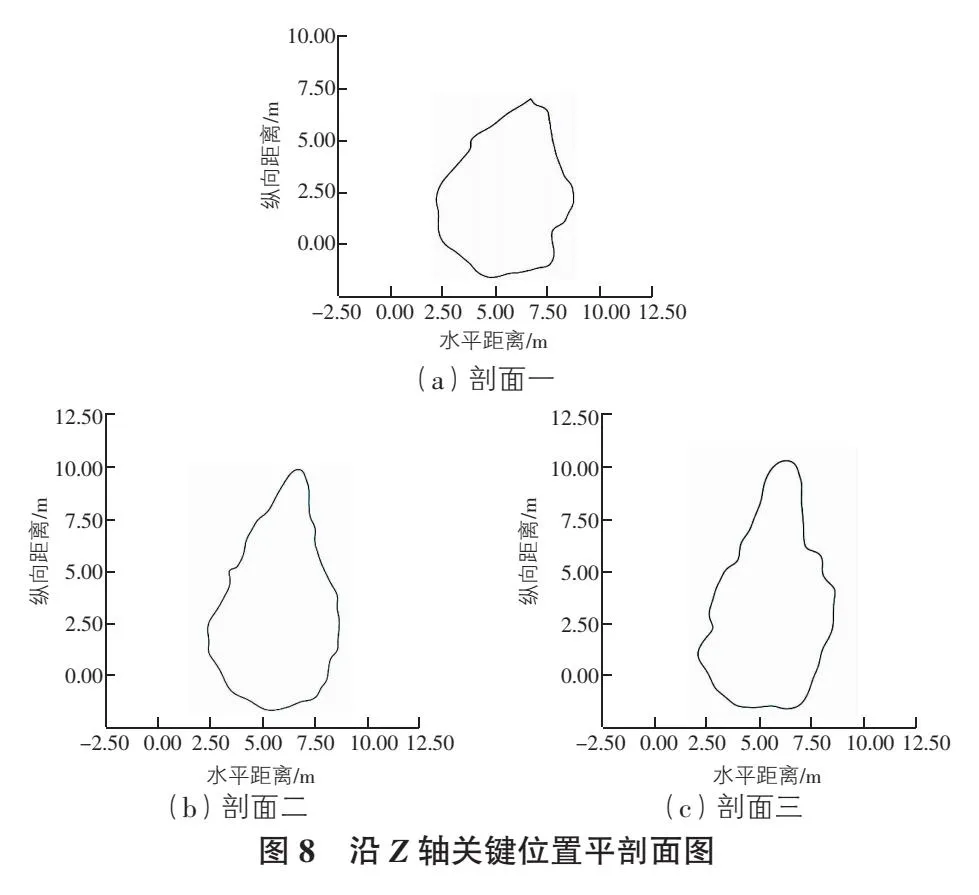
通过地质勘察报告钻孔柱状图显示,此处在22.0 m~31.0 m处存在一个高度为9.0 m的无填充溶洞,与高密度电法和三维激光扫描的测量结果接近,证明本文所采取溶洞探测方法合理有效。通过溶洞的三维模型,可以明确溶洞形态,查看任意关键位置横纵剖面结果,避免在施工过程中造成坍塌的风险和减少盲目注浆处理造成的巨大经济损失。
5 结论
在工程建设过程中,如何准确、经济地确定地下岩溶的空间分布规律和发育规模是当前岩溶探测的一大难题。本文通过高密度电法测量地下溶洞周围的电阻率变化,低成本、高效率地完成不良地质体的筛选,初步了解地下溶洞的分布情况。选择关键位置进行钻孔,利用杆式激光扫描探头进入溶洞内部进行360°扫描,自动获取大量点云数据。
通过利用深度学习的优势,我们可以自动学习和提取点云数据中的特征,并将其应用于点云配准。这种方法能够更好地捕捉点云数据中的细节和复杂性,从而提高配准的准确性和效果。最后,建立地下溶洞三维立体模型,与前期钻孔勘察报告结果相互补充并相互印证,充分掌握溶洞的真实体积、形态等,对关键位置进行剖面输出,为设计施工提供详尽的地质资料,对工程的安全施工至关重要。同时该探测方法具有高精度、高效率、低成本以及探测深度大等特点,是一种有效的溶洞测量手段,在岩溶勘察服务市场具有广阔的应用前景。
