贴近摄影测量技术在建筑立面图测绘中的应用
2024-02-27肖海
肖 海
(中国建筑材料工业地质勘查中心湖南总队,湖南 株洲 412000)
0 引言
建筑物立面图测绘是建筑设计、工程施工和维护管理等领域中的重要环节,可以获取建筑物的几何尺寸、面积和体积等信息,帮助勘测人员准确了解建筑物的外观、结构和细节,为建筑设计、施工和维护提供重要的参考依据。传统的全站仪、经纬仪立面测绘方法需要人工登高,不仅危险,而且费时费力,三维激光扫描测量作业成本高、价格昂贵[1-3]。无人机贴近摄影测量技术是利用无人机搭载的高清影像采集设备,以航拍建筑物立面为目标并通过图像处理和分析得到立面图数据的一种技术手段,该技术可以通过无人机飞行航线规划和自动悬停等功能,基于精确的航迹规划和先进的图像处理算法,可以获得高分辨率的建筑物立面图像,借助计算机视觉和图像匹配技术,可以对图像进行特征点提取、立面线提取等处理,进而重建建筑物立面的三维模型。这种基于图像的无人机立面测绘方法相较于传统的测量方法,具有高效、精准、经济、无需人工登高等诸多优势,大大减少了人力成本和时间成本,具有巨大的潜力和优势,在建筑行业中扮演更加重要的角色,为建筑物测绘和建设提供更精确、高效的解决方案[4]。
1 相关理论基础
1.1 建筑物立面图测绘
与建筑立面平行的铅直投影面上所做的正投影图称为建筑立面图,简称立面图。立面图主要反映房屋各部位的高度、外貌和装修要求,是建筑外装修的主要依据,一般以建筑物的某个立面面向哪个方向,就称为哪个方向的立面图。
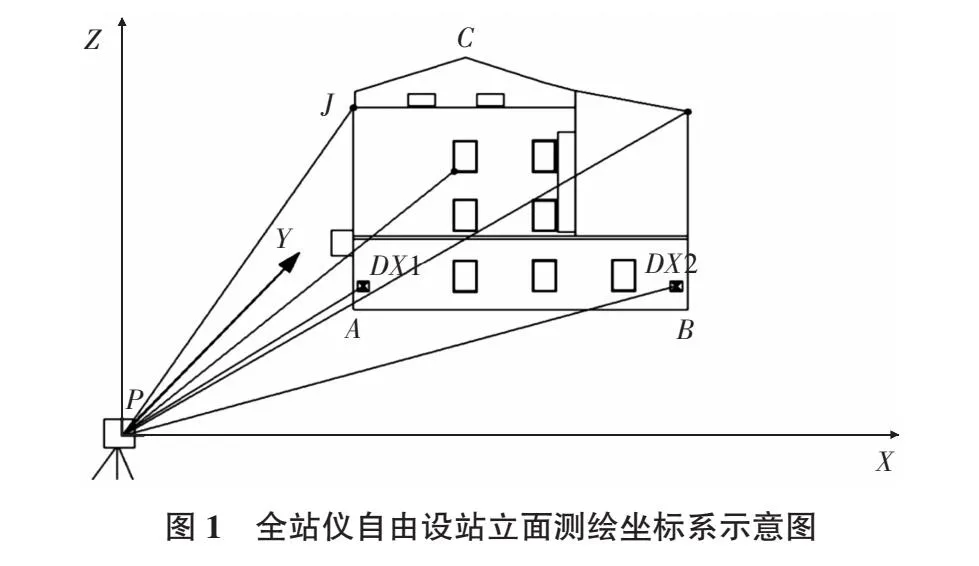
当前建筑物立面图的测绘主要以全站仪为主,坐标测量示意图如图1所示,首先确定测量方向,如选择建筑物正立面、背立面两个侧面作为测量方向并确定测量控制点;然后应用免棱镜法测量和记录特征点坐标;再将测量得到的数据输入绘图软件,绘制建筑物立面图,标注出各部分的尺寸和特征,并按照处理障碍物和特殊要求,以确保测绘结果的准确性和完整性。
1.2 贴近摄影立面测量原理
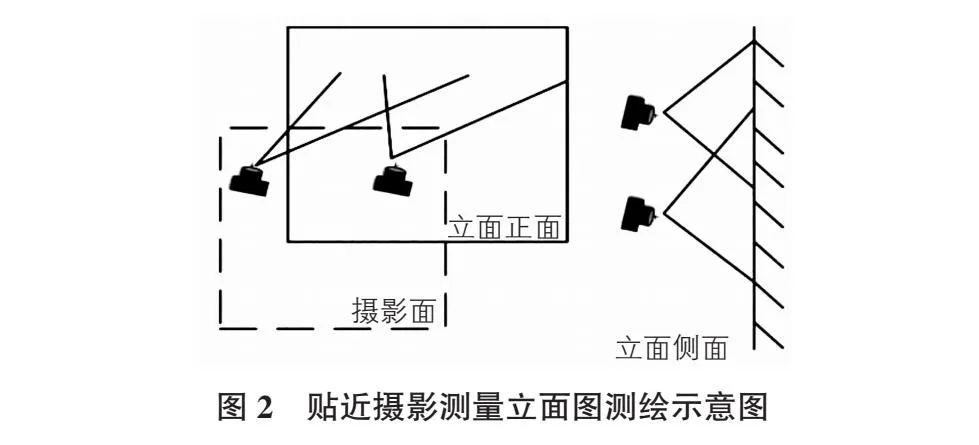
贴近摄影测量以面为对象原理是该技术的核心之一,即以少量三维控制点为基础,利用高分辨率的地面照片和计算机算法,对目标区域进行精细化测绘。相对于倾斜摄影测量,贴近摄影则是在适当的角度下近距离拍摄建筑影像数据,立面纹理细节更丰富,获取信息更加完整,大大提高了立面测绘精度。贴近摄影原理如图2所示[5]。
2 工程实例
2.1 测区概况及技术路线设计
实验测区为某老旧居民楼,现需要进行旧城改造工作,需核算工作量,建筑物高约50 m,共15层。由于楼层较高,传统测绘手段测量难度较大,因此本文基于无人机贴近摄影测量技术获取建筑物立面影像数据,建立目标物高质量实景三维模型,基于三维模型进行立面图绘制。本项目应用无人机贴近摄影测量技术进行立面图测绘,整体技术路线如图3所示,包括需求分析、航线规划、数据采集、实景三维建模、立面图绘制和精度分析等六大部分。

首先根据需求确定扫描区域和精度要求,进而选择合适的无人机和影像采集设备,确保具备高分辨率和良好的图像质量;考虑到建筑物的高度和结构,保证无人机可以贴近建筑物进行拍摄,在地面控制端进行航线规划,并根据实际要求定义关键参数;再实地进行数据采集时,根据航线规划进行自主飞行或遥控操控,采集目标建筑立面数据;紧接着应用实景建模软件对获取的影像数据进行影像数据处理,建立测区实景三维模型;最后在三维模型基础上进行立面图绘制和成果精度分析。本文主要选择的是大疆经纬M300 RTK无人机搭载的是P1相机,主要参数如表1所示,通过搭载不同传感器进行影像数据采集。

表1 大疆经纬M300 RTK无人机参数
2.2 立面影像数据采集
应用无人机设备和相机进行外业数据采集时,首先需要设置一些控制点和标志物,以便后续进行几何纠正和定位,本项目主要布设一些黑白平面靶标黏贴在墙壁立面上;然后通过预先设置的飞行计划,无人机起飞并自动执行航线飞行,本项目飞行高度设为2 m~50 m之间,航向和旁向重叠率均设置为75%,以建筑物为中心,执行四边形影像采集任务。在飞行过程中,无人机与建筑物间的距离设为10 m左右,镜头垂直于建筑立面从四个立面拍摄多个角度和视角的照片,以确保全面捕捉建筑物立面的细节。环绕拍摄时,相邻影像间重叠度需达到80%;转角区域需注意避免因视角变化过大造成漏摄。拍摄完成后检查作业,对于有遮挡、复杂区域还需进行补拍(见图4)。

2.3 实景三维模型重建
本项目应用Context Capture Center软件建立实景三维模型,首先将POS数据、惯性导航姿态信息、原始影像和相机文件导入该软件中,利用软件进行图像处理和特征提取,自动识别和匹配照片中的地面点和建筑物特征,进行空三解算;然后通过密集匹配算法,将各个照片的特征点进行匹配,并进一步生成高密度的点云模型;最后,基于高密度点云数据和三角网拟合算法将点云数据拟合三角网模型,并将照片的纹理信息映射到三角网模型上,生成实景三维模型[6]。
3 立面图测绘及验证分析
3.1 立面图绘制
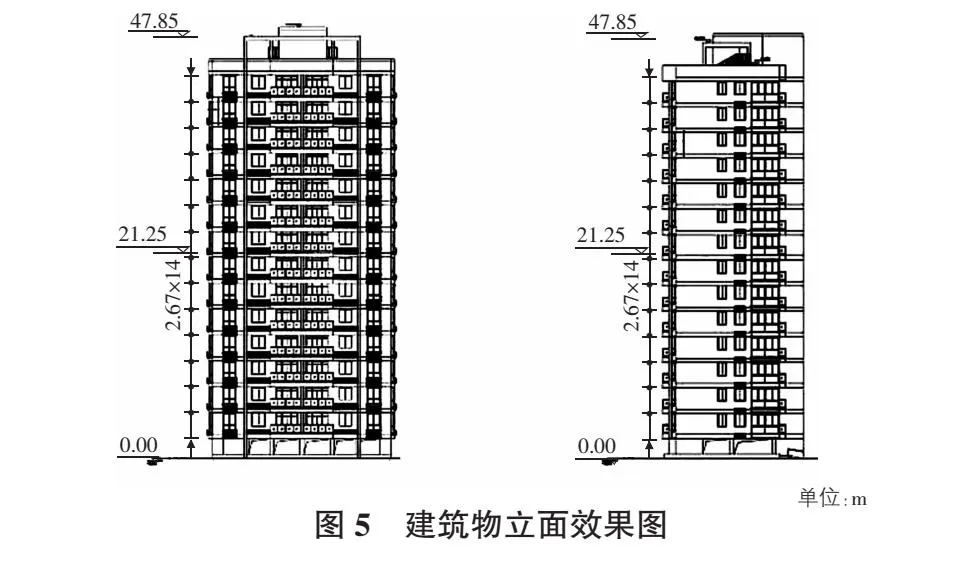
基于实景三维模型进行立面图绘制应用的是EPS三维测图软件,首先将osgb数据格式转换为可识别的3d Tiles格式,导入实景三维模型到绘图软件平台中,并进行必要的设置和调整,比如设置坐标系、缩放比例等;再根据实际需求,在模型中提取出需要绘制的建筑物的立面信息。可以使用工具或手动绘制来提取墙壁、门窗、梁柱等元素,使用绘图工具进行直线、曲线、填充等操作,绘制建筑物的轮廓和细节;然后导出线画图成果,到CAD软件中绘制,根据需要,在绘制好的平面图上添加文字标注、尺寸标记、符号等,以提供更详细的信息和解释;最后进行校验和调整,确保绘制的平面图符合实际建筑物的形状、尺寸和比例,并输出和编辑。本项目绘制好的立面成果图如图5所示[7-8]。
3.2 精度验证分析
为验证立面数据精度是否满足要求,利用全站仪采集的角点距离为真实值,最后与本文方法建立的立面成果图进行求差比较,并利用式(1),式(2)求解中误差和最大相对误差,式中σ为中误差,δ为相对误差,ΔL为差值,n为点个数,本项目共进行了30组验证对比计算。结果如表2所示。
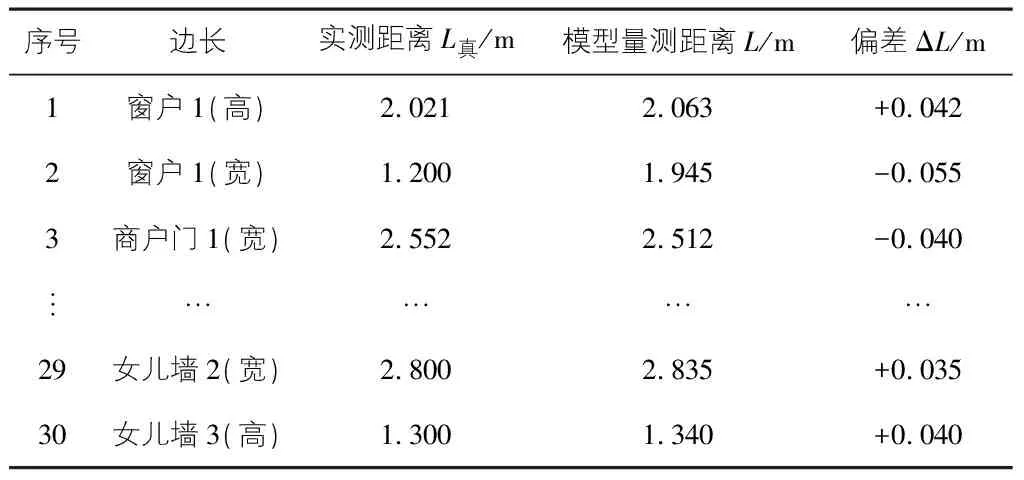
表2 实测距离与模型量测距离偏差
根据表2实测边长与模型量测偏差,得到边长中误差为0.055 m,最大相对偏差为2.11%,整体来看精度较高。
(1)
(2)
通过对30个检查点进行精度评定,可以看出,构建的三维模型立面测量结果与实际建筑高度最大误差5.5 cm,平均误差3.7 cm,中误差为3.9 cm,所有量测结果均在6 cm以内,符合相关规范要求。
4 结语
无人机贴近摄影测量技术应用使建筑物立面的测绘工作更加高效和精确,能有效减少人力和时间成本,可以在建筑设计、工程施工、城市规划等领域,为决策和设计提供重要的数据支持。但是由于该技术在外业数据采集时,无人机需要贴近目标物进行影像数据采集,因此在进行外业操作时需要谨慎规划航线,防止出现“炸机”事故造成人员和财产损失。
