散货船水尺计重所用无人船设计
2024-02-26沈益骏刘新王涛屠卡滨张鸟飞陈雯
沈益骏,刘新,王涛,屠卡滨,张鸟飞,陈雯
(1.舟山海关综合技术服务中心,浙江 舟山 316000;2.张家港海关,江苏 张家港 215600;3.嵊泗海关综合技术服务中心,浙江 嵊泗 202450)
1 设计思路
利用岸基系统,远程控制小型无人船,运用激光雷达避障、卡尔曼滤波器运算、图像传输等技术和原理,使其安全到达指定位置,并把水尺画面稳定传回并由图像识别软件智能读出水尺数据。模拟工作场景见图1。
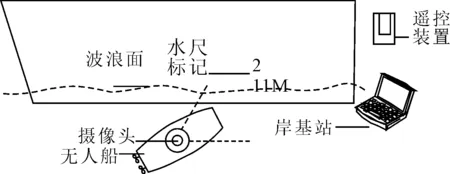
图1 无人船工作场景模拟
手持遥控装置,操控无人船至散货船水尺标记位置,通过摄像头传回图像,同时后台开始录像存储与图像识别,经图像识别软件及后台计算,自动给出该处水尺的数值,则该位置的水尺观测完成,无人船开往船舶下个水尺标记处,继续进行同样的操作。待被测船舶六面水尺全部完成读取后,根据相应公式进行修正计算,最后得出该船舶此时所装载的货物重量。
2 小型无人船设计
小型无人船主要由水上平台、岸基站系统、图像处理3部分组成,见图2。
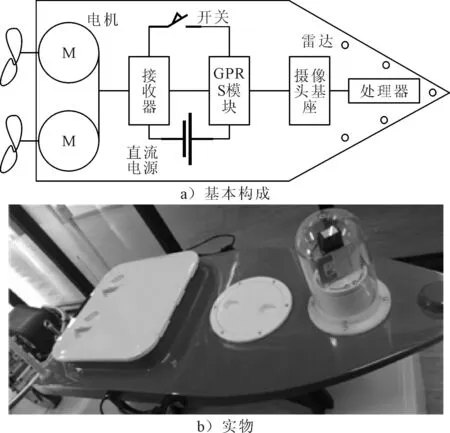
图2 无人船基本构成设计和实物
无人船水上平台设计需考虑平稳行驶的需求,由于使用环境主要是在江海,为避免金属材质船板受海水腐蚀,其全部采用塑料材质。由于亚克力具有较高的透光率,为达到良好的摄录效果且起到保护作用,摄像头部分则由该材质密封覆盖;岸基站系统主要有地面站和手持遥控器组成,为经济实用,选择手持遥控器为主;软件系统则以配套自行研制的图像处理软件。
2.1 水上平台研制
该无人船船体总长1.2 m、宽度0.8 m,船体总高0.7 m(包括凸起部分),吃水0.12 m,船体自重12 kg,船体为塑料材质,满载工作航速为1.5 m/s,锂电池作为电源,续航力不少于2 h。
2.1.1 动力装置设计
无人船由一对电机为其提供动力,电机直径30 mm、长度45 mm。为确保耐用,为其做了全密封防水外壳,防水深度可达50 m。电机工作电压为12 V,由锂电池为其提供动力。螺旋桨为厚度2 mm的3叶正反浆,直径4 cm;正反浆搭配使用,可实现无人船的前进、后退、左转、右转。具体参数见表1。
【评析】在本课的设计中,首先挖掘导数几何意义的知识背景,设置贴近学生实际的坐“过山车”时视线的变化,来帮助学生感性认识在上升或下降与视线的斜率之间的关系;其次借助超级画板,从几何直观来演示递增与递减时,切线斜率符号变化情况;再结合函数单调性定义和导数定义从理性的角度去探索函数单调性和导数正负的关系,让学生从感性到理性去认识和理解函数单调性和导数正负之间本质关系,并归纳总结出一般性结论,真正发展了学生思维能力.
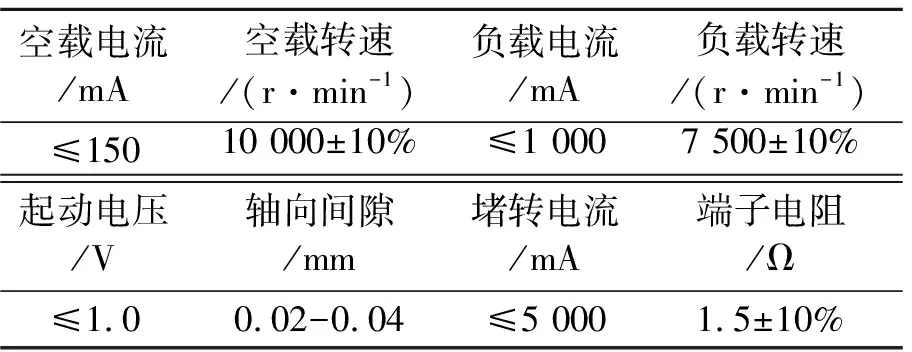
表1 电机参数
2.1.2 避障功能设计
设计无人船不仅可以手持遥控器进行遥控操作,也可通过地面站遥控。因此,在人眼看不见的情况下,为防止碰撞损坏,须具备基本的避障功能[1]。无人船所处工作环境较复杂,水分、盐分高,且水面常有漂浮物,为达到经久耐用的目的,经反复试验,最终选择激光雷达结合处理器的避障方案。具体如下:5枚激光雷达设置在船头位置,分别对应右、右前、前、左前、左共计5个方向。5组数据经处理器处理,做出避障反应。如遇到障碍物,无人船则运用内置处理器系统自动操控电机,通过调整左右电机速率,改变无人船行进方向,进而躲避障碍物。如无法避让,则处理器给出指令,电机立即倒转,无人船做出紧急倒车处置,及时避免撞击。
2.2 岸基站系统研制
岸基站系统主要由地面站(电脑)和手持遥控器组成。工作人员手持遥控器满足0.3 km遥控操作距离;地面站满足2 km遥控操作距离。水尺计重所用无人船均在工作人员视野范围内进行。
2.2.1 遥控控制
无人船的手持遥控由4通道无线控制模块构成。该模块由无线发射和接收模块两部分组成,结合一对电机,分别控制无人船的前进、后退、左转、右转。模块参数见表2。
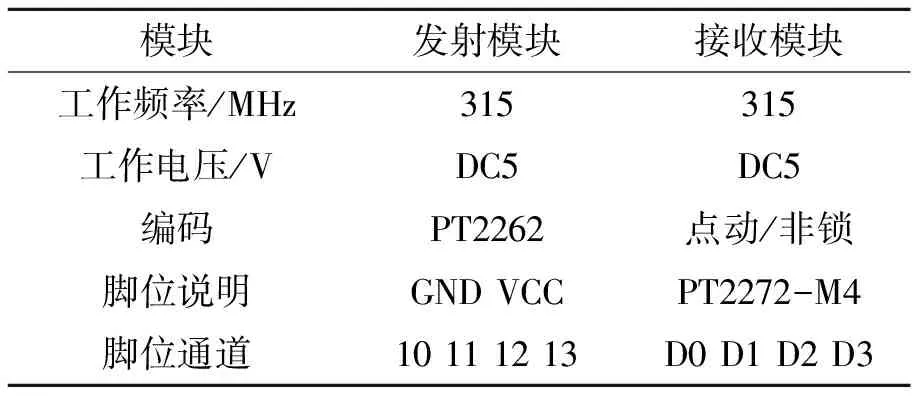
表2 模块参数
2.2.2 无线图像传输
无线图像传输根据调制方式不同分为数字和模拟两种方式。该无人船用途为观测船舶水尺,所以要求运用的技术需具备传输稳定特点,尤其是装运带有磁性的矿产品船舶要具备抗磁干扰,且反应快、延迟低等特点。经综合考虑,该无人船采用被广泛应用的CV5200远距离WIFI自组网图像输出解决方案。自组网不依赖现有基础设施,可减低岸基系统组建的压力,且使无人船整套系统易于携带和搬运。每个网点是用户接入点,也是路由选择点,能有效解决路径衰弱和干扰问题。
2.3 图像处理识别
水尺图像处理则采用文献[2]所述的基于图像处理的船舶水尺标志识别方法。该方法开发的软件工作流程见图3,具体可分为3步:①对无人船传至的水尺图像进行纵向颜色梯度处理,准确识别水线位置;②基于软件库标准水尺标志样本图像,进行自动匹配,无人船的水尺图像经二值化处理后与样本图像进行自动匹配,匹配成功则进入下一环节,匹配失败则换图像重新匹配;③根据设计的计算公式自动算得船舶吃水值。本无人船在岸基系统上安装图像识别软件,并通过技术处理,实现无人船传输的水尺图像进入自行研发的水尺图像识别软件,经软件分析、识别,自动给出水尺吃水数值。
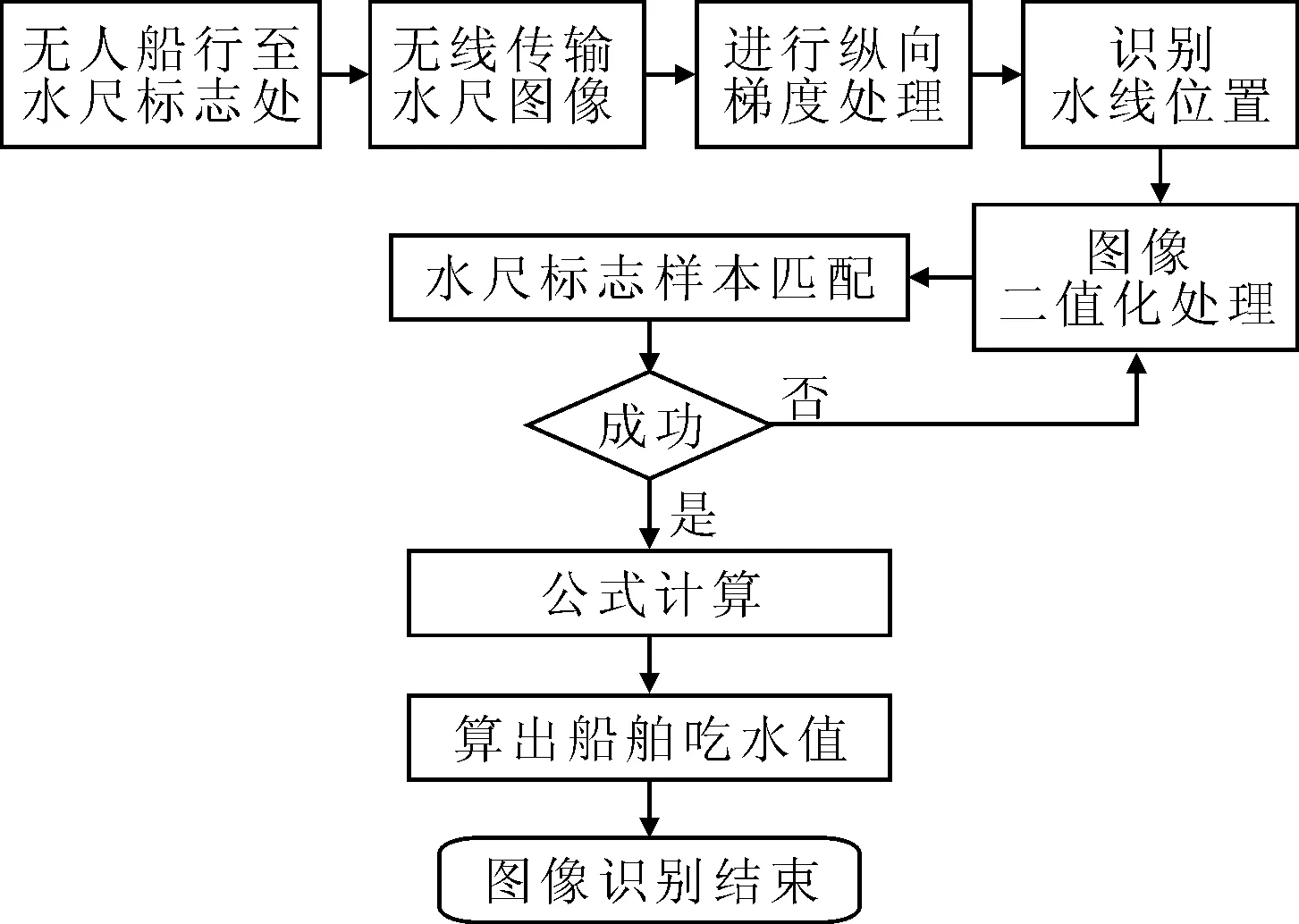
图3 图像处理工作流程
3 使用方法
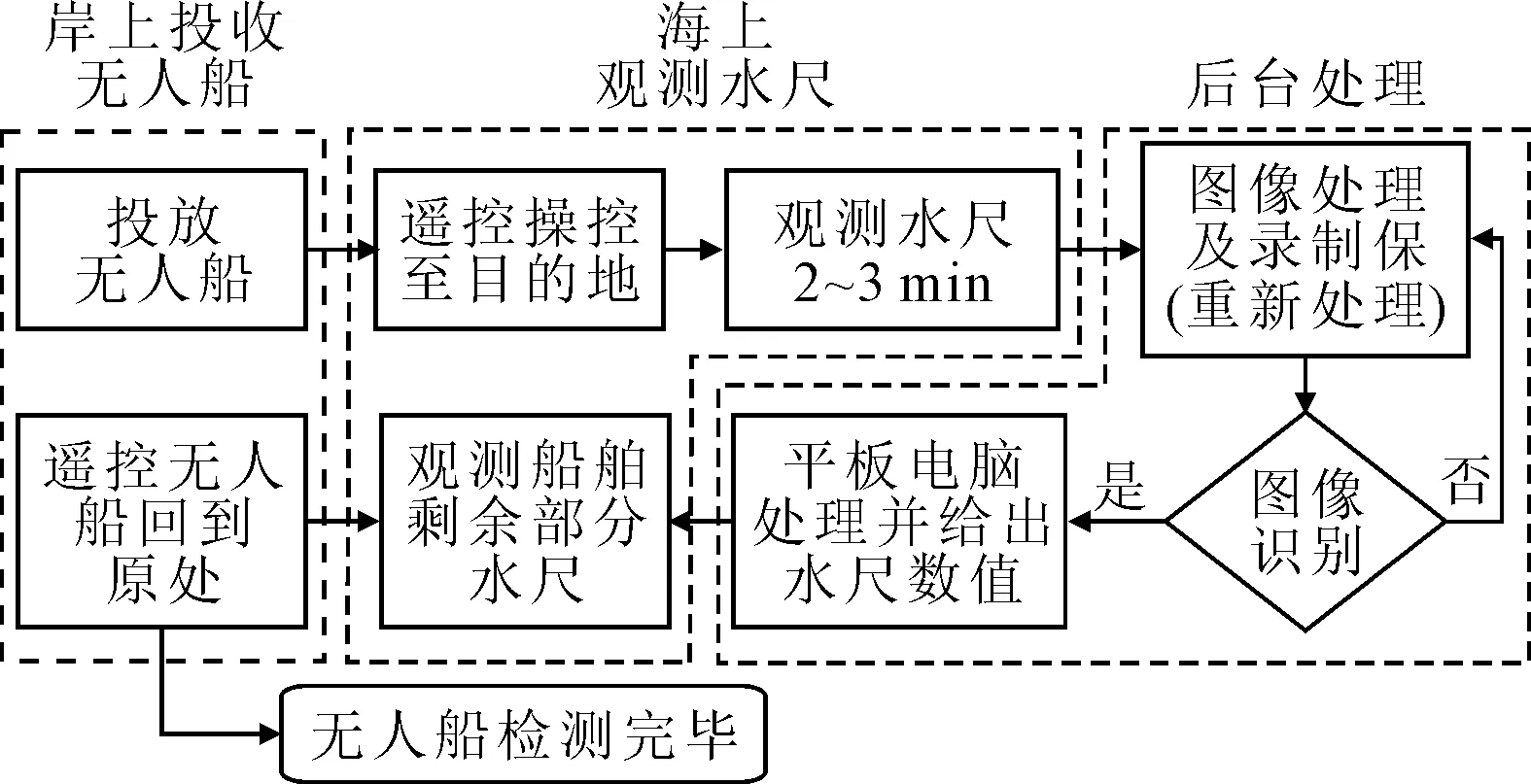
图4 无人船操作流程
具体使用方法如下:待船舶靠港且系缆完毕后,由检验员利用特制支架将无人船由船舶泊位平稳放置在海面上,检验员手持带平板的遥控器,通过实时传输图像,航行至船舶水尺标记处。无人船已配置5枚激光雷达,但是仍可能存在无法识别或者遗漏的盲区,如在这些范围内存有障碍物,无人船则会自动紧急避障,避免造成经济损失。在到达指定位置后,调整无人船位置,使船舶水尺标记位于屏幕中间位置,并占整个画幅的1/3,持续保持2~3 min。在保持阶段,平板自动启动图像处理软件,并给出吃水数值,同时自动录制为AVI格式的高清视频,以备事后查看、确认。船舶六面水尺查看完毕,则遥控无人船回至投放点,由支架将其送回岸边,水尺计重中的观测水尺环节结束。
4 水尺计重数据处理
4.1 排水量计算
排水量的计算依据拱陷校正[3]后的平均吃水以及相关图表进行查算。
4.1.1 计算相应排水量
根据拱陷校正后平均吃水D/M,在船舶排水量表上查算相应的排水量,在图表中查找最近接D/M的吃水点,其对应的排水量或载重量数作为基数Δ1。
4.1.2 排水量的纵倾校正
当船舶产生纵倾时,由于此时吃水线和平浮时不一样,其船艏和船艉部分所增减的出水、入水体积也不一样,如果按平浮状态的排水量表查算,显然与实际排水量不符。因此必须对前述查算的相应排水量进行校正,以计算出纵倾校正后的排水量。校正方法采用国际上通用的根本氏校正[4]公式。
(1)
式中:δΔ1为排水量的第一项纵倾校正值,t;TC为校正后船舶吃水差,m;Xf为D/M处漂心距船舯距离,m;TPC为D/M相应处的每厘米吃水吨数,t;Lbp为垂线间长,m。
(2)

纵倾校正后,船舶总排水量为
Δ3=Δ1+δΔ1+δΔ2
(3)
式中:Δ3为纵倾校正后的排水量。
4.2 货物重量计算
排水量经港水密度校正、压载水的测量和计算、淡水和燃油的测量和计算后,将有关数据代入式(6)进行计算,最终得出无人船看水尺后货物的总重量[5]。
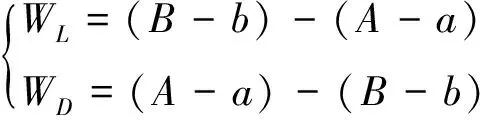
(4)
式中:WL为装货重量,t;WD为卸货重量,t;A为装或卸前校正的排水量,t;a为装或卸前船用物料及其他货物等的总重量,t;B为装或卸货后校正后的排水量,t;b为装或卸货后船用物料及其他货物等的总重量,t。
5 试验测试
2022年3—4月份,在舟山某港区对在此靠港卸货的国际散货船进行测试,测试的目的是为检验其数据是否真实靠、工作效能是否显著提升。测试方法如下:在规定时间内有序随机选择其中10艘次船舶的艏、舯、艉共计6处为水尺观测目标。为确保测试数据可信,测试时,分成两组并同时进行,并做好完成时间记录,第一组为使用无人船观测水尺,第二组为传统水尺计重作业目测方式进行。记录观测数据并运用文中上述排水量等公式计算货物重量。目测水尺精度公制为0.01 m,无人船则为0.001 m。数据对比测试见表3,时效性对比测试见表4。
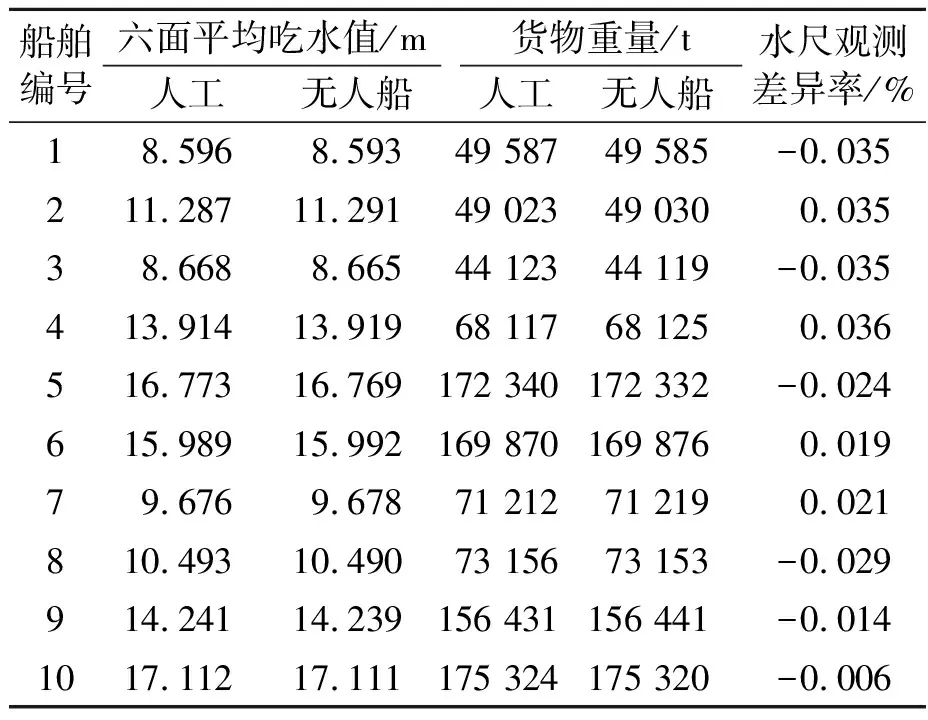
表3 无人船与人工观测方法测试数据
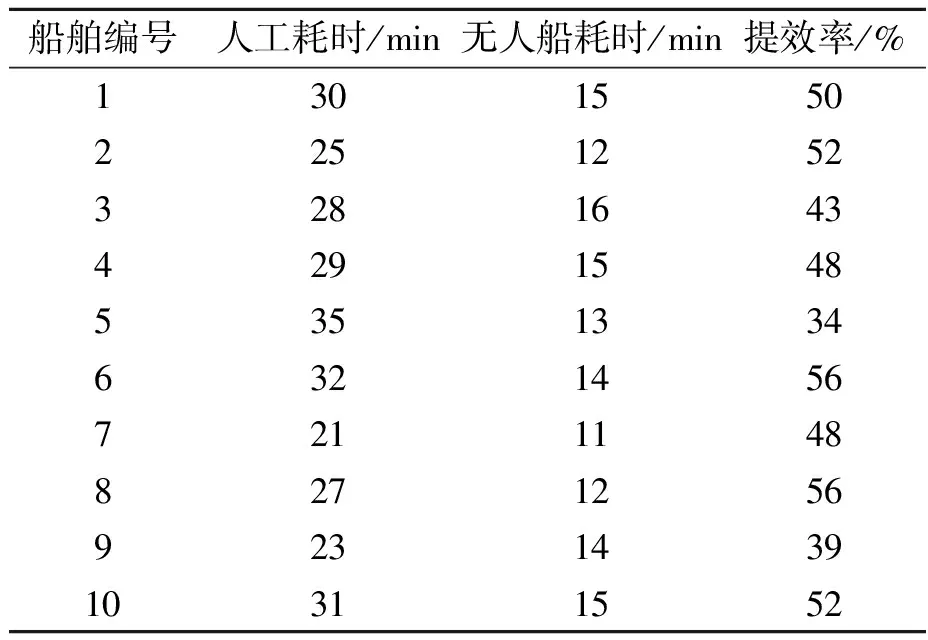
表4 工作时效测试数据
无人船较人工观测水尺的差异率N为
(5)
式中:M、K分别为自动装置和人工测量值,m。
由表3和表4可见,10船次国际散货船在无人船和传统人工观测平均水尺的差异范围在0.001~0.005 m之间,平均差异率为0.003%,完全符合船舶制表的准确度在0.1%以内,水尺计重的准确度可在0.5%以内要求,无人船较人工观测水尺方式,效能提高34%以上。
6 结论
基于水尺计重专用,改良水上平台,船身采用塑料等材质,使无人船坚固、耐用;利用岸基系统,远程操控无人船,运用激光雷达避障、图像传输等技术,使其可精准到达指定位置;为无人船研制的水尺图像识别软件可智能给出吃水数值。
测试结果表明,运用无人船观测船舶水尺,其误差在规定范围内,且较传统人工水尺计重模式,效能得到显著提升。
