一种半自动化联系测量方法的应用
2024-02-23范朋飞
范朋飞
(中国铁路设计集团有限公司,天津 300251)
引言
在城市轨道交通工程建设过程中,联系测量作为指导施工的一道重要环节[1],始终发挥着极为重要的作用[2-3]。通过联系测量可以建立地面控制点与地下控制点的对应关系,获取地下控制点坐标及控制边方位角[4],从而实现地下工程严格按照设计位置施工的目的[5]。已有许多学者开展相关研究,许锋等在使用全站仪、钢丝、铅锤等常规仪器设备情况下,仅通过对多根钢丝进行多次观测便可实现坐标传递,获得井下控制点坐标及方位角,指导隧道施工,适用于特殊结构和复杂现场环境下的竖井联系测量工作[6];姬晓旭等提出一种井上采用双测站极标法计算吊锤线坐标,井下采用边角后方交会计算导线点坐标和起算边方位角的竖井联系测量新方法,相较于传统联系三角形法而言,具有定向精度高、测量原理明了、测量效率高、占用井筒时间短和操作简单快捷等优点[7];孙士通等提出一种一井定向井下联系测量控制点采用任意设站布点方式的改进方法,该方法提高了地铁长隧道一井定向精度,极大提高了井下隧道定向边测设的稳定性,保证定向边方位角的精准性[8]。目前,在地铁联系测量方法中,无论是单井联系测量[9-11]还是两井联系测量[12-13],传统的测量方法为全人工瞄准测量,测量过程中经易受到诸多外部环境条件影响[14],致使整体作业效率低、费人费时、易出错[15]。
基于以上不足之处,提出一种半自动化联系测量方法,采用“TSDI多测回测角”机载软件,配合徕卡全站仪,并利用研发的数据后处理软件,以期真正实现半自动化联系测量。
1 方法介绍
无论是单井联系测量还是两井联系测量,传统最常用的方式就是悬挂钢丝测量,基本原理即在近井点架设全站仪,人工观测并记录近井点与后视点和钢丝之间的角度和距离,再通过人工数据整理,组成联系三角定向导线或无定向导线,代入地面已知点坐标成果,经过严密平差解算出井下待求控制点坐标和控制边方位角成果[16-17]。
“TSDI多测回测角”机载软件是一款自主开发的全站仪测量软件,软件通过学习点信息,支配全站仪实现自动跟踪采集相应方向点角度和距离信息,达到多测回角度和距离自动采集记录的效果[18-20]。软件直接内嵌于徕卡各系列全站仪,无需外挂设备,无需开通GeoCOM,稳定可靠。
半自动化联系测量工作流程见图1,在使用过程中需要注意以下几点。
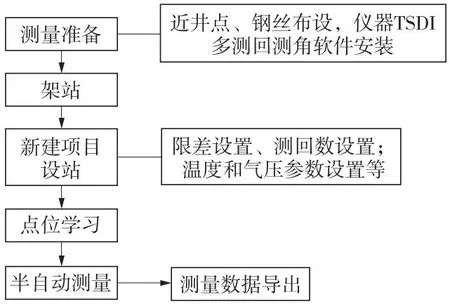
图1 半自动化联系测量流程Fig.1 The process of Semi-automatic Connection Mea-surement
(1)待测钢丝需要分别在井上、井下适当的位置粘上反射片。
(2)点位学习的时候,后视点棱镜学习应选择ATR自动照准模式,钢丝反射片学习应选择无棱镜模式。
(3)点位学习完成后,测量类型选择自动定位,测量的时候仪器会自动跳转到待测点,然后人工点击测量,当跳转到钢丝位置时需要人工精确瞄准钢丝后再点击测量。
(4)测量过程中钢丝点位的水平角是测量的重点,需要严格把控水平角限差,做到精确对准测量。而竖直角和斜距只是用来计算平距,故竖直角和斜距不作限差限制。
采用以上方法,可以减少全人工操作繁琐的工序,大幅提高外业数据采集的效率,规避人工记录数据易出错的问题,实现数据自动化整理。
2 数据处理软件设计与实现
2.1 软件总体设计
软件设计包括3个层次。
①原始观测数据读取,数据格式为“TSDI多测回测角”软件生成的TPT文件格式。
②参数设置,设置水平角归零差、2C互差、同一方向值测回间互差限差,设置平距测回内和测回间较差限差,设置距离改正地球曲率半径和平均折光系数[18]。
③数据整理,输出Excel观测手簿、平差报告、整理后的导线数据。
软件设计主要原则如下。
①软件可靠性,通过参数设置,检查观测数据各项指标是否超限,通过实例验证角度和距离计算理论方法正确可靠。
②软件生成成果多样性,目前可生成Excel电子手簿,代替人工记录手簿;可生成平差报告,分别针对水平角和水平距离输出详细报告;可生成两款不同导线平差软件所需数据格式,满足不同平差软件需求。
2.2 平距计算
联系测量过程中在测站架设全站仪,观测记录方向测点的水平角、竖直角和斜距,距离角度示意见图2。
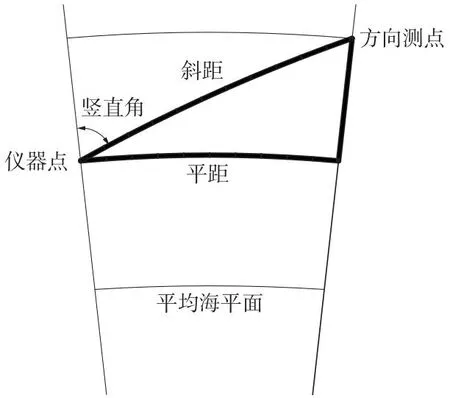
图2 距离角度示意Fig.2 The sketch map of distance and angle
通过竖直角和斜距可计算出测站到方向测点的平面距离,基于测站高程面的平面距离计算式为

式中,D平为基于测站高程面的平面距离;S斜为测站到方向测点的测量斜距;β为测站到方向测点的竖直角读数;k为平均折光系数;R为地球曲率半径。
利用徕卡全站仪搭载“TSDI多测回测角”软件,采集2组观测数据,采用两种方案获取平面距离。方案一:采用人工操作全站仪方式直接测量并记录测站到方向测点之间的平面距离;方案二:利用采集的竖直角和斜距通过式(1)计算平面距离。两种方案所得平面距离对比结果见表1。
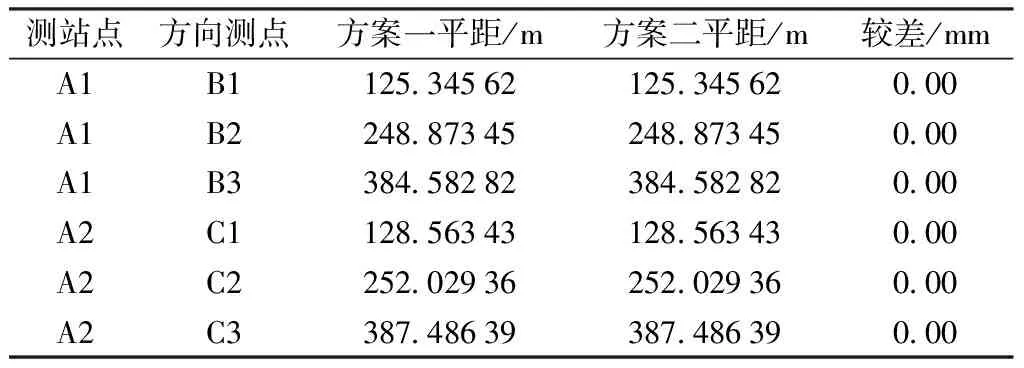
表1 方案一与方案二所得平面距离对比
由表1可知,本文所列平距计算公式计算所得平面距离与全站仪所测平面距离完全一致。
2.3 软件实现与验证
根据提出的软件总体设计原则,结合平面距离计算方法,基于VB.NET开发一款专门针对半自动化联系测量数据整理软件,软件功能简单实用,界面清晰,操作简便,软件主界面见图3。
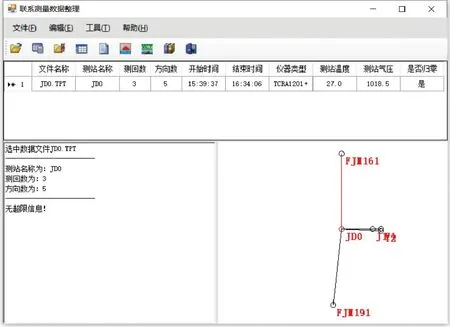
图3 软件主界面示例Fig.3 Example of software main interface
采用本软件对深圳地铁建设三期工程中1个车站的1次联系测量的数据进行整理,并与几款常用软件对比,结果见表2、表3。

表2 不同软件数据整理方向角对比 (°)
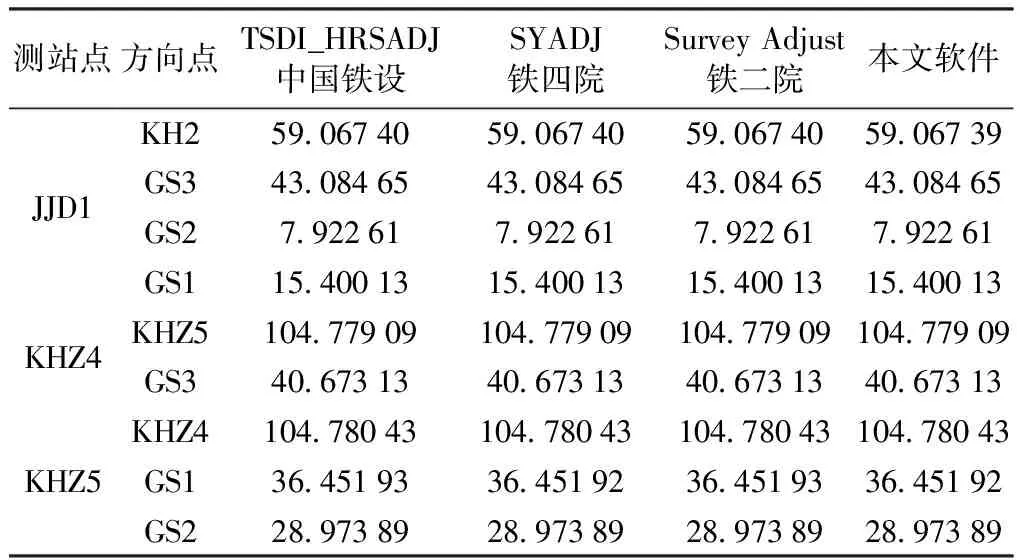
表3 不同软件数据整理平面距离对比 m
通过对比可知,采用本文联系测量数据整理软件与常用的几款成熟软件整理结果一致,表明数据整理结果可靠,可用于半自动化联系测量数据处理。
3 半自动联系测量方法应用分析
3.1 实例介绍
深圳地铁三期某条线路盾构井需进行联系测量,该盾构井条件受限,长度仅为38 m,而单向盾构隧道长度达到2 km。该工点地面控制网采用附合导线测量方式,由地面4个控制点对其近井加密点进行加密测量,然后通过近井点对该井开展联系测量工作,井上井下点位示意见图4。
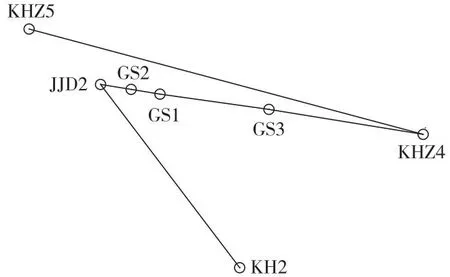
图4 井上井下点位示意Fig.4 The sketch map of points on and underground the well
本次采用2种方案开展联系测量工作,具体方案如下。
(1)常规方法
采用悬挂3根钢丝,组成1个单井联系三角形测量和2个两井定向联系测量,通过不同方法组合确保人工联系测量方法成果可靠,为验证方案二半自动化方法成果可靠性提供基准。整个过程中,从照准、测量到读数记录,再到数据整理等,人工干预程度较高。
(2)半自动化方法
采用全站仪自动定位加人工辅助瞄准钢丝的方式,基本实现定位、数据采集、记录、后处理自动化,大幅降低人工干预的程度和整个测量过程占用的时间。
3.2 应用分析
通过对2种方案联系测量数据进行处理,得到井下控制点的坐标及控制边的方位角,2种方案成果对比见表4和表5。
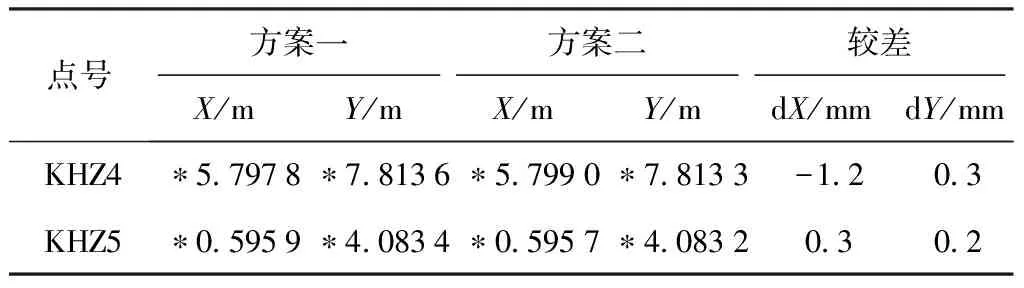
表4 2种方法所得控制点坐标对比(简化坐标)

表5 两种不同联系测量方法所得控制边方位角对比
由表4、表5可知,方法成果与传统方法各自独立测量成果一致,方位角较差2.75″,满足城市轨道交通工程测量规范中关于各次地下近井定向边方位角较差应小于16″的限差要求,精度可靠。
除此之外,对两种方案联系测量工作进行综合对比分析如下。
(1)方案一:需要设置井上和井下2个测量组,每组需要3~4人,完成全部联系测量工作花费约4 h,共完成人工记录观测数据48组;
(2)方案二:在确保钢丝稳定的情况下,设置1个测量组,仅需2人,先测井上再测井下,完成全部联系测量工作花费约1 h,自动记录观测数据48组。
由对比分析可知,方案二使用人员少,测量速度快,占用工作井时间短,对施工的影响小,较传统人工方法工作效率高。
4 结论
通过对半自动化联系测量方法介绍、数据处理软件设计开发及半自动化联系测量实例应用分析,得出以下结论。
(1)提出的半自动化联系测量可操作性强,使用测量人员少,占用施工时间少,测量效率更高,工作效率约为传统联系测量方法的2倍。
(2)通过实践,采用本文联系测量数据整理软件与常用的几款成熟软件整理结果一致,表明数据整理结果可靠,可用于半自动化联系测量数据处理。