基于“BIM+仿真模拟”的地铁车站摄像机监控盲区问题研究
2024-02-23江文化江伟伟刘玉振刘林婕
江文化 江伟伟 刘玉振 刘林婕
(1.中铁云网信息科技有限公司,北京 100039; 2.天津城建大学能源与安全工程学院,天津 300384)
引言
随着我国经济不断发展,地铁客流量迅猛上升,也对地铁监控系统提出了更多、更高的要求。一般情况下,地铁监控系统主要有视频监控、门禁管控和入侵报警三大部分,无论从重要性还是从所需的资金费用来说,视频监控都是最重要的,约占地铁安防建设总成本的70%~80%[1-2]。因此,许多城市地铁系统都要求车站视频监控“无死角”[3-4]。根据对目前我国地铁车站安防监控摄像机施工验收的调查,存在以下问题:摄像机受梁、柱等遮挡情况突出;PIS屏和导向标识牌之间相互遮挡;摄像机被导向、标识牌、PIS屏等设备遮挡;由于摄像机布置位置不合理导致监控缺失,出现盲区;由于摄像机布置的位置不合理,导致监控重叠现象严重,严重浪费资源。如何优化车站摄像机部署位置,在尽可能不增加摄像机的前提下,解决摄像机的监控盲区问题变得尤为重要。
目前,国内外学者对城市轨道交通工程中监控摄像机的布置已有许多研究,主要分为施工和运维两方面。施工方面主要考虑施工阶段的人员安全、设备安全以及施工进度,CHEN等提出一种使用建筑信息模型(BIM)的摄像机位置优化框架,该框架考虑不同施工阶段的遮挡物的改变和工作区域的变化,进而提升摄像机总的覆盖范围[5];ARIF等提出一种基于BIM技术并考虑建设成本和容易实现的监控框架,以便更好了解施工进度[6];ZHANG等提出一种新的方法,在考虑地铁项目施工过程中侧壁和支撑引起的遮挡的情况下,优化摄像机的布局,使站点覆盖率达到100%[7];TRAN等提出一种考虑不同场地布局与时间的摄像机安装方案,来解决高空活动的工作空间和建筑工地的动态特性等难题[8];谢逸等提出一套针对地铁施工环境中不安全施工行为的检测框架,对施工不安全行为进行实时检测,以达到预警的效果[9]。
然而,以往研究主要集中在施工场地,在运营层面,早期的研究使用二维(2D)或三维(3D)方法来优化摄像机的位置[10-11]。然而,采用这些方法在实际应用中还存在着位置布局不合理、监控盲区广泛、监测效率不高等诸多问题。
与传统的方法相比,建筑信息模型(BIM)在集成的信息环境中对建筑构件的几何表现更加精确,包括空间属性、物理特征、功能特性、几何属性等特性,可以更加生动地反映车站监控区域精确的布局。因此,BIM可以自动收集一些重要的信息元素,为摄像机布局优化过程提供精确的室内建筑布置场景,使得摄像机部署更加经济合理。另外,还可以使优化的部署结果三维可视化,避免在施工过程中的变更和拆改。ALBAHRI等提出一种利用建筑信息模型的新方法,为利用模型中丰富的信息更好地优化摄像机的个数和布局提供新的机会,但仅局限于有静态遮挡物和建筑内部[12]。此外,CHEN等利用3D BIM模型在建筑现场模拟真实的闭路电视(CCTV)现场视图,使BIM模型能够评估和进一步改善影响现场视图的一系列有关参数,但是只能以二维的方式呈现,难以达到监控全覆盖的设计要求[13]。XIE等基于BIM技术,开发一种基于改进遗传算法的量化摄像机布局优化方法,其摄像机覆盖率提高27.2%[14]。PULIGANDLA等提出一种大型真实世界相机放置优化问题的多分辨率方法,能提供较好的相机覆盖率[15];甘超莹等设计一套采用智能视频算法、基于图像识别技术的智能视频监控系统,可有效提升车站运营管理能力和对突发事件的处置应对能力[16]。以上研究表明, BIM技术具有可视化、可模拟、可分析等特点,不仅在施工领域得到了广泛的应用,也成为运营安全管理的必要环节之一[17]。随着BIM技术的深入应用,通过研究BIM+技术解决城市轨道交通工程建设中的难题成为一种必然趋势[18]。以下提出一种BIM+仿真模拟技术对摄像机监控区域进行仿真模拟和盲区分析,以期有效解决监控摄像机的盲区问题,实现降本增效的目的。
1 技术原理
1.1 创建目标建筑BIM模型
通过建立地铁车站和公共区装修末端设备(装修末端设备包括:照明灯具、消防设施末端的自动喷淋、消火栓箱、FAS系统的火灾报警电话等末端设备、通风设备末端风口、风机盘管出风口、自动扶梯、指示牌、自动售检票系统、乘客信息系统显示器、安防监控摄像机、通信监控摄像机等相关专业设备)BIM模型,记录相关构件的三维坐标。若项目处于设计阶段,根据相关专业施工图,创建BIM模型;若为已建成项目且需要新部署或修改已部署的监控摄像机,则可通过激光点云或实景建模,创建BIM模型。
1.2 部署监控摄像机
基于上述创建的BIM模型,根据监控摄像机布置施工图,部署监控摄像机。其中,部署监控摄像机包括:确定监控摄像机部署的空间坐标及监控摄像机的视场区域。
(1)确定摄像机的最大和最小物距
根据摄像机原理,摄像机传感器成像尺寸与实际成像尺寸的比例关系[19]为

(1)
式中,L为被摄物体至镜头的距离即物距;H为被摄物体高度;h为CCD/CMOS靶面高度;f为摄像机焦距。
被摄物体尺寸取一固定值,再根据摄像机靶面尺寸、摄像机焦距范围,通过BIM仿真模拟,确定摄像机至看清物体的最大距离Lmax和最小距离Lmin,即摄像机的最大和最小物距。
(2)确定摄像机的视场区域

2个坐标系之间转换的布尔莎模型为
(2)

通过布尔莎模型转换,获取对应的WGS-84坐标,完成监控摄像机视场坐标,形成视场区域。
(3)确定监控摄像机的合理监控区域
根据部署的监控摄像机生成各个监控摄像机的监控区域包括:根据模拟生成的各个监控摄像机的监控区域,调整各个监控摄像机的监控区域直至每个监控摄像机的监控区域在预设的理想区域内(即最优监控区域)。调整各个监控摄像机的监控区域,主要内容如下。
①根据摄像机的焦距和需要监控的范围,调整被摄物体至镜头的距离L,确定视场角Q(视场角包括水平视场角Qw和垂直视场Qh)的大小及物距L,有
(3)
(4)
式中,Qw为水平视场角;Qh为垂直视场角;W为被摄物体的宽度;H为被摄物体的高度;L为物距。
②根据监控摄像机的焦距f,视场角Q及物距L,通过模拟分析,确定监控摄像机的合理监控区域。
1.3 计算被遮挡情况并分析盲区
将监控摄像机的视场角最外边缘看做射线,并假定周边物体的三维模型的不规则包围体由n个面组成。可以使用射线与面是否相交的算法来完成计算,如果相交,说明摄像机视野被遮挡,产生了冲突。
平面表示为
XndotX=d
(5)
式中,Xn为平面的法线;dot为点积;X为平面上的一个点;d为平面到原点的距离。
现在得到射线和平面的两个方程[20]

(6)
若彼此相交,则上述方程组有解,有

(7)
t=d-XndotRaystart/XndotPointOnRay
(8)
式中,PointOnRay为射线上的点;Raystart为射线的原点;t为射线上的点距离原点的位置,Raydirection为射线的方向。
把t代入原方程组,得到射线与平面的碰撞点。如果XndotRaydirection=0,则说明射线与平面平行,将不产生碰撞;如果t为负值,则说明交点在射线的相反方向,也不会产生碰撞。
2 技术验证
天津地铁5号线淮河道站原安防监控施工图采用二维设计,全站共有107个监控摄像机,其中,通信监控摄像机15个,安防监控摄像机92个(安防标清半球摄像机41个,安防高清半球摄像机26个;安防高清快球摄像机9个,安防隐蔽快球4个,安防高清枪机12个)。由于二维设计只能考虑本专业的安防要求,当其他专业设备遮挡摄像机并产生监控盲区时,设计人员没有办法计算分析,特别是导向牌、PIS屏和结构梁柱对摄像机监控范围的遮挡。当在施工过程中或者公安验收时发现此问题,就需要拆改或增加摄像机,严重影响施工进度和增加建设成本。
2.1 模型创建
为了实现摄像机监控盲区的分析,需要根据相关专业施工图,创建地铁车站建筑、结构、装修及车站公共区装修末端设备(包含照明灯具、自动喷水、风口、指示牌、乘客信息系统显示器、监控摄像机等)BIM模型。若项目处于设计阶段,可根据相关专业施工图,创建BIM模型;若项目为已建成的建筑,则可通过激光点云或实景建模,创建BIM模型。
2.2 PIS屏和导向牌遮挡通信监控摄像机的模拟和分析
将通信监控摄像机参数输入到BIM模型中,根据施工图设计要求,调整摄像机空间坐标和视角,再经模拟和盲区分析,发现有通信摄像机被导向牌遮挡现象,全站共有9处,其中站厅层有5处,站台层有4处。通信摄像机与导向牌位置关系见图1,通信摄像机被导向牌遮挡BIM仿真模拟见图2。经优化设计,将负责监控楼扶梯口的通信监控摄像机调整到指示牌的上方,调整后的效果见图3、图4。
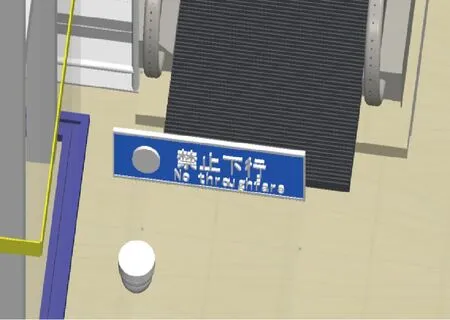
图1 通信摄像机与导向牌位置关系Fig.1 Position relationship of communication camera and guide plate
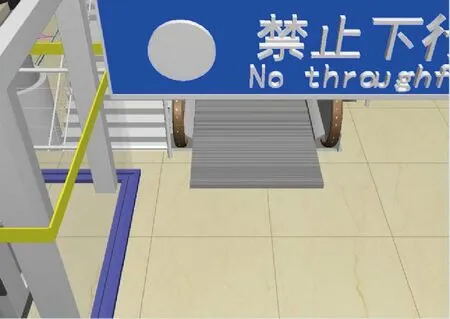
图2 通信摄像机被导向牌遮挡BIM仿真模拟Fig.2 BIM simulation of communication camera blocked by guide plate
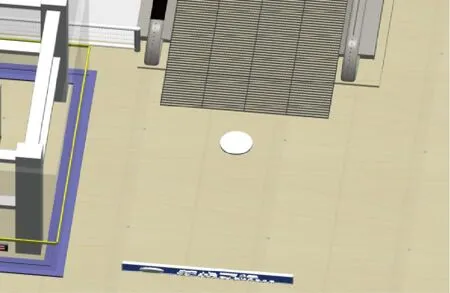
图3 调整摄像机与导向牌位置后关系Fig.3 The relationship after adjusting the position of the camera and the guide plate

图4 优化后通信摄像机监控范围BIM仿真Fig.4 BIM simulation of optimized communication camera monitoring range
2.3 盲区分析
将安防监控摄像机参数输入BIM模型中,根据施工图设计要求,调整摄像机空间坐标和视场角,再经模拟和盲区分析,发现全站有安防摄像机被导向牌遮挡共7处。如站台层的摄像机被2.7 m长导向牌遮挡,见图5、图6。经重新计算分析,因该导向牌只需服务1个电扶梯,故将导向牌由原设计长度为2.7 m改为1.5 m,并向左移动至电扶梯的正中央,修改后的监控效果见图7、图8。
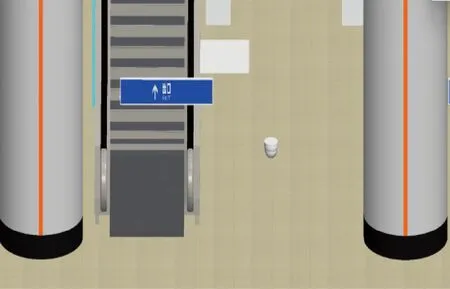
图5 安防摄像机与导向牌位置关系Fig.5 The position relationship between the security surveillance camera and the guide plate

图6 安防摄像机被导向牌遮挡BIM仿真Fig.6 BIM simulation of security camera blocked by guide plate

图7 摄像机与优化后的导向牌位置关系Fig.7 The position relationship of the camera and the optimized guide plate

图8 优化后安防摄像机监控范围BIM仿真Fig.8 BIM simulation of optimized security surveillance camera range
2.4 结构柱后方的监控盲区分析
对公共区结构柱附近的安防监控摄像机进行BIM+仿真模拟和盲区分析,发现结构柱后方安防监控摄像机存在4处盲区。其中:2个柱子后方由于没有摄像机,会产生部分盲区,盲区范围见图9、图10。经仿真模拟和盲区分析,将站台负责左端的摄像机移动到左侧,将右端的摄像机移动至导向牌上方就可以解决此结构柱后方的盲区问题,见图11、图12。
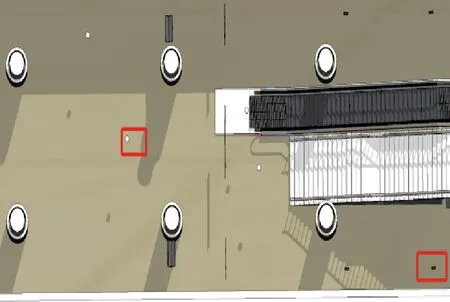
图9 摄像机与结构柱间的相对位置关系Fig.9 The relative position relationship between the camera and the structural column
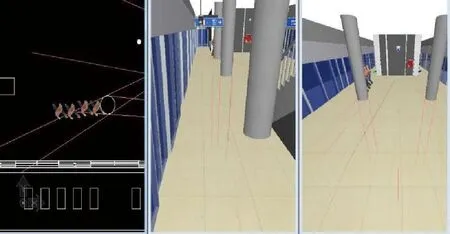
图10 安防监控摄像机被结构柱遮挡BIM仿真Fig.10 BIM simulation of security surveillance camera blocked by structural column
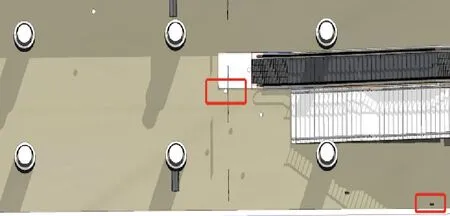
图11 结构柱与调整后的摄像机位置关系Fig.11 The position relationship of the structural column and the adjusted camera
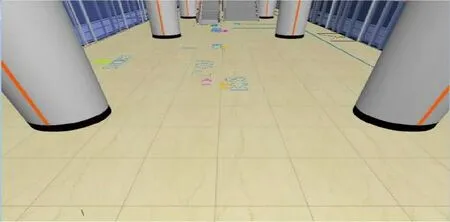
图12 优化后安防监控摄像机无盲区BIM仿真Fig.12 Optimised BIM simulation of security surveillance camera without blind zone
2.5 摄像机部署优化原则
在解决摄像机盲区问题时,原则上不得增加摄像机数量,应通过优化摄像机位置来解决摄像机的监控盲区问题,当遇到确需调整其他专业设备时,可以会同相关专业协调配合,调整相关专业设备。
应用以上技术,对车站公共区每个摄像机的监控区域进行仿真模型和盲区分析,最终形成车站的监控摄像机盲区分布,根据站厅层原安防监控摄像机施工图进行监控盲区分析后的监控盲区分布见图13。图13中,玫红色为盲区范围,黄色区域为通信监控摄像机监控范围,灰白色区域为安防标清半球摄像机监控范围,红色区域为安防高清半球摄像机监控范围,青色为安防高清枪机摄像机监控范围,绿色为安防高清快球摄像机监控范围,蓝色区域为安防隐蔽快球摄像机监控范围。应用本技术解决摄像机监控盲区后的站厅层安防监控摄像机无盲区分布见图14。
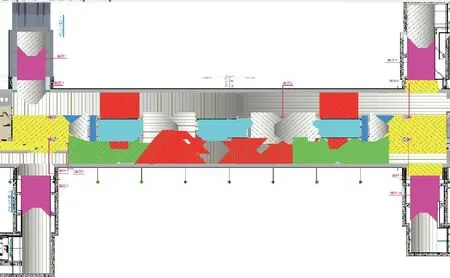
图13 站厅层安防监控摄像机盲区分布Fig.13 Blind zone distribution of security monitoring camera on the station hall layer
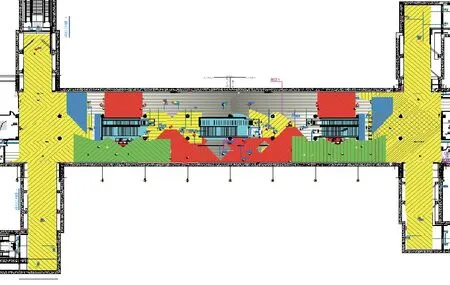
图14 站厅层安防监控摄像机无盲区分布Fig.14 Distribution of security monitoring cameras on the station hall layer without blind zone
2.6 监控无盲区的确认
通过应用前述BIM+仿真模拟技术,对车站公共区所有的监控摄像机进行监控范围的仿真模拟和盲区分析,并绘制摄像机监控范围分布。经分析确认无盲区后,形成监控摄像机部署施工图优化方案。该方案经安防监控设计工程师确认后,形成监控摄像机部署施工图,再经公安机关确认无误后,完成监控摄像机施工图的设计。
3 结论
对摄像机监控范围进行仿真模拟和盲区分析的技术原理,并以天津地铁5号线淮河道站车站公共区摄像机的监控盲区分析为案例进行了技术验证,得出结论如下。
(1)利用“BIM+仿真模拟”技术对摄像机的监控区域进行仿真模拟,并对摄像机监控盲区进行分析,可以有效解决在二维设计中无法彻底避免的摄像机监控盲区问题。
(2)将BIM技术和安防监控专业进行技术上的融合应用,为实现监控“无死角,全覆盖”的安防要求提供技术保障。
(3)可以避免因安防验收发现盲区问题时出现的施工拆改或者过度增加摄像机现象,从而有效提高施工速度,降低建造成本,起到降本增效的目的。