地面LIDAR在滑坡灾害三维实景建模中的应用
2024-02-23时丕旭
时丕旭
(中铁第一勘察设计院集团有限公司,西安 710043)
引言
高速铁路建设和运营阶段,在路基、隧道口等构筑物附近滑坡现象时有发生,影响构筑物稳定性,对人民财产和生命安全构成威胁[1-2]。因此,如何高效处理滑坡灾害,将损失降低至最小显得尤为重要。滑坡三维实景模型可为施工处理提供基础数据,如何高效获取滑坡体三维模型参数,是滑坡体病害整治的关键。
为快速实现滑坡等灾害整治,国内众多学者进行了相关研究。韩彬等利用三维激光扫描技术结合Charge Coupled Device(简称“CCD”)摄像机,研究三维激光扫描在地质风险动态监测中的可行性[3];赵立都等采用多期地面三维激光扫描的滑坡点云数据,研究地面三维激光扫描在滑坡监测中基准的统一性[4];党杰等以贵州水城独家寨崩塌地质灾害为依托,采用机载Light Detection and Ranging(简称“LIDAR”)与地面三维激光扫描相融合的方法,对滑坡等灾害变形监测[5];南竣祥等以沿黄公路边坡地质灾害为依托,研究三维激光扫描监测地质灾害隐患点的可行性,制作完成的彩色三维模型可用于成果展示及数据分析[6]。
综上所述,获取滑坡等地质灾害三维坐标的手段较多,常见的有传统人工测量、机载LIDAR、地面三维激光扫描(简称地面LIDAR)等。其中,地面LIDAR技术具有现场灵活、操作简单、高速度、高密度、高精度、数字化、自动化、非接触等优点[7]。以宝兰高铁上庄隧道出口滑坡为例,采用地面LIDAR技术优化布设扫描站点,以无靶标扫描方式获取铁路滑坡体表面的点云数据,利用测站点坐标、全景影像等构建三维实景模型,辅助滑坡灾害整治。
1 地面LIDAR工作原理
地面LIDAR由三维激光扫描仪、数码相机、控制器和电源供应系统共同组成[8],是一种集成了激光测距、激光扫描及校正系统等多种高新技术的新兴空间信息数据获取手段[9-10]。
地面LIDAR扫描模块工作中,动力系统转动反射棱镜,将激光光束顺着扫描方向扫过被测物体,激光测距模块测量激光发射、返回时间和激光相位,可自动计算出物体上每一点至扫描仪的距离,即
(1)
式中,Δt为返回时间;S为被测物和扫描仪之间的距离;C为光速。
同时,控制器测量每个脉冲激光束的水平角α和天顶距θ,根据极坐标系和平面直角坐标系的坐标转换公式,把激光发射处定位为坐标原点[11]。由此可得被测物体表面点P坐标,计算公式为
(2)
所获取被扫描物体的点云影像具有可量测性,且三维激光扫描外业数据采集无需光源,可在夜间或黑暗的作业环境中进行扫描[12],可操作性较强。
2 无靶标扫描研究
2.1 仪器设备
本次选用RiEGL VZ-2000i三维激光扫描仪,其测距为2 500 m,精度为5 mm,数据采集速度最高可达500 000点/s。另外,RiEGL VZ-2000i独有的全波形雷达技术,可进行回波数字化、实时波形处理、多波束收发处理,即使在可见度低、多重目标的恶劣情况(粉尘、雾霾、植被、小雨)下,也能正常工作。
RiEGL VZ-2000i三维激光扫描系统主要由扫描仪主机、数码相机、电池等组成,仪器设备见图1。扫描仪主机获取体被测物体表面的点云,数据相机拍摄全景影像,为点云贴附真实纹理,电池为扫描仪主机和相机供电。现场需采用RTK设备测量扫描仪测站对中点坐标和高程,并量取扫描仪高。

图1 外业仪器设备Fig.1 Field equipment
2.2 无靶标扫描测量
传统的地面三维激光扫描仪测量现场需在扫描范围内均匀布设公共的靶球[13],用于站点间点云数据拼接。而本次扫描无需布设靶球,通过识别测站间重叠点云实现拼接,为滑坡三维实景建模外业测量节约大量时间。将地面三维激光扫描仪架设在已知点上开展外业数据采集,通过发射激光脉冲获取具有真实三维坐标的物体表面点云数据[14],外业数据采集流程见图2。
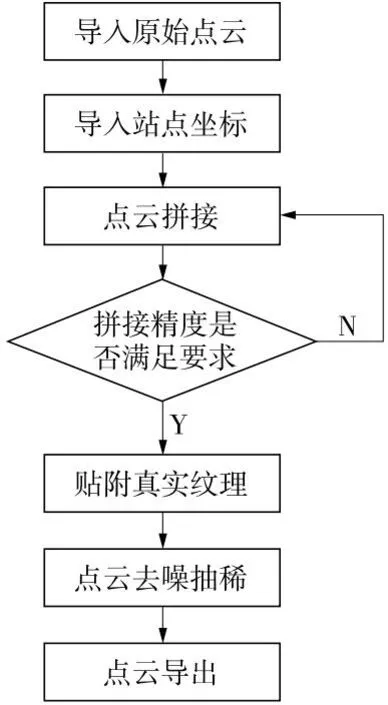
图2 外业数据采集流程Fig.2 Field data collection process
以宝兰高铁上庄隧道出口滑坡为例,滑坡影响范围约0.2 km2,严重威胁铁路安全运营,现场情况见图3。由图3可知,滑坡现场环境复杂,人员无法直接到达滑坡体位置,传统人工RTK测量方法难以实现,故决定采用地面LIADR技术采集滑坡体表面点云数据,降低外业测量的风险,提高作业效率。

图3 上庄隧道出口滑坡现场环境Fig.3 Site environment of landslide at the exit of Shangzhuang Tunnel
点云数据采集前,需设计扫描站点位置,通过勘查滑坡周围环境,优化布设的扫描站点,实现地面LIDAR扫描的最大视场范围并保证相邻站点间点云重叠度。再利用实时定位系统GPS-RTK采集站点坐标和高程,地面三维激光扫描仪布置在设计的站点上,并量取每一站的仪器高,采集滑坡体点云数据,现场点云数据采集见图4。

图4 铁路滑坡现场点云数据采集Fig.4 Point cloud data acquisition of railway landslide site
应合理设置站点间隔,若间隔太大,则采集的点云稀疏,不利于后期点云拼接;若间隔太小,则采集的点云数据量过大,为后期数据处理带来麻烦,造成不必要的浪费。在现场通视良好的情况下,扫描站点间隔宜设置为60 m,以保证相邻扫描站间有足够的重叠区;若通视情况较差,则应适当增加扫描站数,以保证后续点云拼接精度。
3 数据预处理
点云数据获取及测站点坐标采集完成后,对点云和影像进行预处理[15],点云数据预处理流程见图5。

图5 点云预处理流程Fig.5 Point cloud preprocessing flow
3.1 点云拼接
三维建模过程中,需要对不同测站的点云进行拼接[16]。本次在宝兰高铁上庄隧道出口滑坡周围共扫描9站,均利用RTK设备采集扫描仪对中点坐标和高程,量取仪器高,获取扫描站点中心坐标和高程。在RiSAN PRO软件中,将每一站点云数据与对应的站点中心坐标匹配,手动旋转点云,再进行自动拼接,计算出本次点云拼接精度为6.9 mm,满足三维建模精度要求[17],点云自动拼接结果见图6。
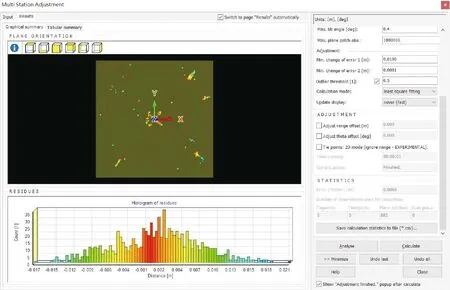
图6 点云拼接计算结果Fig.6 Point cloud splicing results
3.2 点云去噪
地面三维激光扫描中,人员走动或物体高反射会影响采集的点云质量,滑坡附近有部分积水,扫描过程中易出现水体镜面反射影响点云质量,局部点云数据见图7。图中的黑色部分即为水体影响,拼接完成后应对影响点云质量的噪点进行删除,完成点云去噪[18]。

图7 点云数据(局部)Fig.7 Point cloud data (partial)
在RiSCAN PRO软件中,噪点去除采用人工删除和自动删除相结合的方式。对于滑坡现场杂草等植被产生的噪点,采用软件自动滤除;在扫描仪周围及人员走动产生的噪点,采用人工删除,自动过滤和人工删除噪点后的点云数据见图8。

图8 去噪后的点云数据Fig.8 Point cloud data after denoising
3.3 影像预处理及纹理贴附
外业数据采集过程中,在每一测站扫描完成后,三维激光扫描仪搭载的相机自动采集360°范围的影像,一般每测站采集6张影像用于合成全景影像后。对于个别质量较差影像,调整对比度、曝光度、饱和度等。在点云数据拼接、坐标转换、去噪等完成后,可根据拍摄的影像贴附点云真实色彩[19],真实纹理贴附后的点云数据见图9。

图9 真实纹理贴附的点云数据Fig.9 Point cloud data attached to a real texture
4 三维实景建模及应用
4.1 三维建模
滑坡点云数据经过配准、拼接、坐标转换、降噪、真实纹理贴附等预处理后,通过点云封装,生成三角网,再根据点云分布位置生成模型。
封装后的点云由于去噪等操作可能会出现空洞现象,需对模型进一步优化。在多边形阶段,应删除三角形并采用最小二乘算法拟合曲面[20],再根据滑坡现场实际情况对三角网进行优化。在软件中执行Smooth and decimate操作,在保证曲面结构特征的基础上,减少多边形数量,使模型更加光滑,滑坡三维实景模型见图10。

图10 滑坡三维模型Fig.10 Three-dimensional model of landslide
在对模型的处理过程中,不改变模型表面的纹理走向,填补模型漏洞时,应尽量沿物体的实际纹路进行处理。处理完成后,可以看出滑坡的真实形态和特征,并能实现二次量测,这是传统测量无法达到的。
4.2 精度分析
在生成的三维实景模型中提取部分特征点坐标,现场采用RTK在相应位置实测坐标,平面坐标及高程对比均小于5 cm,说明三维实景模型精度优于5 cm,可满足1:500地形图和滑坡土方量预估的精度要求。
4.3 三维模型应用
生成的滑坡三维模型可进行二次量测,根据生产需要在模型中生成等高线,辅助地形图制作。计算土石方量,在RiSCAN PRO软件中,可以计算出滑坡处缺失的土方量,可直接预估出滑坡加固所需的土方量,辅助施工。三维模型还可用于隧道病害监测、滑坡危险性评价、大坝变形监测、铁路选线辅助决策等[21]。建立的三维实景模型在软件中可录制视频,可直观展现滑坡体及周围环境的全貌,便于制定滑坡灾害整治方案。
5 结语
滑坡灾害严重影响铁路安全运营,且人员难以直接到达滑坡体表面,传统测量方法无法获取滑坡体表面的三维坐标,而地面LIDAR克服了滑坡现场接触测量的困难,可快速获取滑坡体及周围地物表面的三维点云数据。另外,采用该方法现场无需布置靶标,通过测站间重叠点云拼接,再经过内业处理即可生成滑坡三维实景模型。建立的滑坡三维模型具有可量测性,可直接在模型中生成等高线,计算土方量、表面积等,辅助滑坡灾害整治。